
Abstract
The sparse regularization (SReg) model has been prove to be an effective tool for the structural damage identification. However, the SReg model overly penalizes the larger components in the damage parameter leading to extra estimation bias, and it ignores the similarity information among different measurements that is useful for improving the performance of damage identification. To further improve the accuracy of damage identification, this study proposes a joint fraction function regularization model by jointing multiple fraction function regularization models, where fraction function regularizers are utilized to overcome the excessive penalty drawback, and the similarity of different measurements is employed through a data fusion technique. The numerical and experimental study show that, compared with the previous SReg models, the damage identification errors of the proposed model are reduced by 4.15% and 2.12% on average, respectively.
Introduction
Structural health monitoring (SHM) is a powerful and increasingly prevalent technology for long-term monitoring of structural safety (Chen, et al., 2023a; Wang et al., 2021). The essential part of SHM is structural damage identification, which identifies the structural damage and evaluates the state of the structure using acquirable information (Chen et al., 2023c; Song et al., 2023).
At present, there are many commonly used damage identification methods, such as manual visual damage identification methods (Kim et al., 2017), vibration-based damage identification methods, and image-based damage identification methods (Gao and Mosalam, 2018). Among them, vibration-based methods have been extensively studied because of their advantages of identifying internal structural damages without destruction (Hou and Xia, 2020; Debnath and Das, 2021; Goyal and Pabla, 2016; Chen, et al., 2023b). The vibration-based methods include model updating method (Mottershead and Friswell, 1993) and dynamic fingerprint method (Sun et al., 2019), among which, the model updating method (Sun et al., 2013; Xu et al., 2012; Chatzi and Smyth, 2009) has become one of the main methods for structural damage identification due to its strong interpretability and operability. Model updating method iteratively updates the stiffness parameters in a finite element (FE) model to minimize the discrepancy between simulated and measured vibration characteristics, which improves the accuracy of the FE model in reflecting the actual structural performance. And then the updated stiffness parameters are utilized for damage identification (Li et al., 2023). Moreover, among model updating methods, the model updating method based on sensitivity analysis is particularly important because of its sensitivity to small parameters changes (Mottershead et al., 2011; Marwala, 2010; Chen and Sun, 2021). Unfortunately, since the number of mode orders that can be effectively used is much smaller than the number of elements, the mathematical equation between the modal information and the damage information established through the sensitivity is an underdetermined equation.
Typically, regularization models are employed to solve the above underdetermined equations. For the structures in the early stage of damages, the damage locations, relative to the whole structure, should be spatially local and sparse (Huang and Beck, 2015; Hou et al., 2018b). Considering the spatial sparsity of structural damages, the l0-norm regularization model is applied to obtain the sparse solution. But the l0-norm regularization model need to be convex relaxed to the l1-norm regularization model since the solving of the l0-norm regularization model is a NP-hard problem. So far, the l1-norm regularization model has been widely applied in the structural damage identification (Zhang and Xu, 2016; Hernandez, 2014; Wang and Hao, 2015; Cao et al., 2018; Zhou et al., 2015). In addition, the regularization parameter selection method in the l1-norm regularization model and the Iterative Reweighted Least Squares (IRLS) optimization algorithm are proposed in paper Hou et al. (2018a) and (Bruckstein et al., 2009) to solve the above models, respectively, which makes the solving of the l1-norm regularization model more complete.
Although the l1-norm regularization model could characterize the sparsity of structural damages, as stated in paper, it overly penalizes the larger components in the damage parameter leading to extra estimation bias. In fact, the fraction function regularizer can mitigate the drawback of the l1-norm regularizer by controlling the severity of the penalties and characterizes the sparsity of the structural damages better, which is more consistent with the spatial sparsity of actual structural damages. Moreover, the similarity among different measurements of the same modal parameter of the structure in a short time has been proved to be useful in the paper Li et al. (2023c), where the similarity among different measurements is utilized through a data fusion technique to improve the accuracy of damage identification.
Inspired by the above theories, this paper propose a joint fraction function regularization model for structural damage identification. In the proposed model, the fraction function regularizer are considered to characterize the sparsity of structural damages, and the similarity among different measurements is utilized in damage identification. Compared with the previous models, the drawbacks of the similarity among different measurements being ignored and l1-norm regularizer excessively punishing are overcome, simultaneously, which further improves the performance of damage identification. The proposed model is solved using the IRLS optimization algorithm. Numerical and experimental study results show that, compared with the previous models, the proposed model effectively reduces the structural damage identification errors.
Method
Background
Sensitivity analysis
The free vibration of an undamped structure with N degrees of freedom is expressed by the following differential equation:

In the FM model, the stiffness matrix of the structure in the intact state can be expressed as follows:

When the structure is damaged, the stiffness matrix reduces to

The Stiffness Reduction Factor (SRF) is defined by

The sensitivity-based model updating method establishes the relationship between damage parameter θ and modal residual R:

By considering the analysis presented above, the damage parameter θ can be determined by solving equation (5). However, since the number of available mode orders is much smaller than the number of elements, the solving of equation (5) is an underdetermined problem with an infinite number of solutions in mathematics, which needs to be described by a regularization model. The regularization model is expanded in detail in the next subsection.
l1-norm regularization model for structural damage identification
Based on the sparsity of the structural damage, the sensitivity analysis for damage identification can be described by the following constrained optimization problem:



Joint fraction function regularization model for structural damage identification
The proposed model
The structural damages induces alterations in physical parameters, consequently leading to variations of modal parameters (i.e., measurements), hence the similarity among different measurements can be expressed by the similarity of sparseness profile of different damage parameters. In this paper,
On the other hand, the fraction function regularizer not only provides a more accurate representation of the sparsity of structural damages compared to the l1-norm regularizer, but also effectively addresses the issue of excessive penalties associated with the l1-norm regularizer.
The form of the fraction function is shown as follows:

To sum up, on the basis of l1-norm regularization model (8), a joint fraction function regularization model (Joint-Fra-Reg) is proposed as follows:
In the model (10), minimization of
For the regularizer
For the regularizer
In this paper, the initial value of the hyperparameter σ in the fraction function is set to 0.01. To ensure convergence of the algorithm, a continuation scheme is introduced in the “Optimization algorithm” subsection, which dynamically adjusts the hyperparameter σ during the optimization process.
Optimization algorithm
Joint-Fra-Reg model is a special case of the fused lasso model (Hoefling, 2010). A efficient algorithm for the solution is available in Hocking et al. (2011). Specifically, Joint-Fra-Reg model can be solved in two steps: a sparsification step and a fusion step. And the details as follows:
Firstly, in the sparsification step, λ = 0 and the similarity among different measurements is not considered, provisionally. That is, the following optimization problems is solved:
IRLS algorithm (Bruckstein et al., 2023b) is employed to solve the model (11). The gradient of the damage parameter θ
l
obtained from the lth measurement is given by the following equation:



It is worth noting that the derivative of


According to quasi-Newton (Bruckstein et al., 2023b), the iterative formula can be represented as follows:

Considering that most components of the damage parameters are 0 or close to 0, to reduce complexity and enhance algorithm stability, the iterative calculations in the corresponding variables focus only on the key components. Specifically, we define a specific setting as follows:



Obviously, the l0-norm can be well approximated by the fraction function
Secondly, in the fusion step, the components of θ
l
and θ
l
′ without significant difference are fused. The detailed fusion progress is as follows:
The numerical algorithm, which combines the fusion step with the sparsification step, is presented in Algorithm 1.

2.2.3. Parameter selection
There are two important parameters β and λ in the proposed joint fraction function regularization model. β is the sparsity regularization parameter, and λ is the similarity regularization parameter. As mentioned in the subsection “The proposed model”, β controls the sparsity of the damage parameter θ l , and λ controls the similarity of sparseness profile of different damage parameters, and thus controls the similarity among different measurements. A two-step parameter selection method is employed in this paper Fang et al. (2016) and Du et al. (2016).
In the first step, the sparsity regularization parameter β is selected. In regularization problems, the L-curve criterion is commonly applied for parameter selection. Inspired by previous researches, linear scaling and the corner of the curve is considered to be the best selection for sparsity regularization parameter β (Hou et al., 2018a). During this step, the similarity regularization parameter λ is set to zero, and only a single measurement, denoted as L = 1, is utilized.
The second step involves the selection of the similarity regularization parameter λ. In this paper, a grid search method is employed, where the sparsity regularization parameter β, determined in the first step, remains fixed. Subsequently, the similarity regularization parameter λ is selected based on this fixed β (Du et al., 2016).
The experimental results show that there is no interaction among different
Numerical study
In numerical studies, a planer simply supported truss is utilized to illustrate the effectiveness of the proposed model. The proposed model and all numerical experiments are executed using Matlab on a computer equipped with an Intel(R) Core(TM) i7-7700 CPU operating at a frequency of 3.60 GHz, and 8 GB of memory.
Model description
The numerical study involves a planer simply supported truss structure composed of 31 elements with 25 degrees-of-freedom. The configuration of the truss is depicted in Figure 1. The material/geometry properties are given as follows: mass density is Configuration of the planer simply supported truss.
Damage scenario simulation
The damage scenarios in the numerical study.

In this paper, the relative model error defined as
Damage identification for damage scenario 1

Noise levels of different measurements in different damage scenarios.

Note: “Mea” means “Measurement”.
Figure 2(a) illustrates the variation of the residual norm and solution norm with different values of the regularization parameter β in the fraction function regularization model. The range of β is set from 0.005 to 1 with an increment of Δβ = 0.005. Based on the L-curve criterion, the parameter range Parameter selection and damage identification in DS1 on the truss structure.
The results of 50 repeated tests on Noise Level 1 and Noise Level 2 are presented in Figure 2(c) and (d), respectively. In these figures, the mean values are represented by bars, while the standard deviations obtained from the 50 tests are depicted as short thin horizontal lines.
Figure 2(c) shows the comparison among the damage identification results estimated by the Joint-Fra-Reg model, the Joint-SReg model, the Fra-Reg model on Noise Level 1 and the true damage, which are represented by Joint-Fra-Reg, Joint-SReg, Fra-Reg and True Damage, respectively. The x axis represents 31 elements, and the y axis represents the SRF of each element. As can be seen from the figure, all the three models identify the damage at element 4, but there are intermittent identification errors between element 10 and element 31 in the damage identification results of the Joint-SReg model and the Fra-Reg model. There are obvious errors at element 12 and element 22 in the damage identification results of the Joint-SReg model and an obvious error at element 12 in the damage identification results of the Fra-Reg model. However, there is only one obvious identification error at elements 22 in the damage identification results of the Joint-Fra-Reg model. The damage identification error δ of Joint-Fra-Reg model, Joint-SReg model and Fra-Reg model are 3.19%, 3.88% and 3.53%, respectively. So the damage identification quality of the Joint-Fra-Reg model is higher.
The comparison among damage identification results estimated by three models on Noise Level 2 and the true damage is shown in Figure 2(d). The results show that all the three models can identify the damage at element 4. But interfered by noise, there are a certain degree of identification errors between element 11 and element 22 in the damage identification results of three models. The damage severity of element 4 identified by the Joint-SReg model is less than the true damage, which brings certain security risks. At the same time, there is an obvious recognition error at element 22 in the damage identification results of the Fra-Reg model. The damage identification error δ of Joint-Fra-Reg model, Joint-SReg model and Fra-Reg model are 5.65%, 6.93% and 7.31%, respectively. Therefore, the damage identification quality of the Joint-Fra-Reg model is higher.
Damage identification for damage scenario 2
Firstly, in this numerical study, the L-curve criterion is applied to select the optimal sparsity regularization parameter β in damage scenario 2 for the joint fraction function regularization model (10), joint sparse regularization model (Li et al., 2023c) and fraction function regularization model (Li et al., 2023b), respectively (Hou et al., 2018b; citealpL-curve). Then the selected parameter was substituted into the corresponding model. Secondly, two different noise levels are designed in this numerical study, and the specific data are the same as the damage scenario 1. In order to simulate the real damage identification better, the two noise levels are introduced into different measurements in the same damage scenario. Noise levels of different measurements in the damage scenario 2 are listed in Table 2.
Figure 3 shows the results of damage identification for the damage scenario 2. By the L-curve criterion, as shown in Figure 3(a) and (b), Parameter selection and damage identification in DS2 on the truss structure.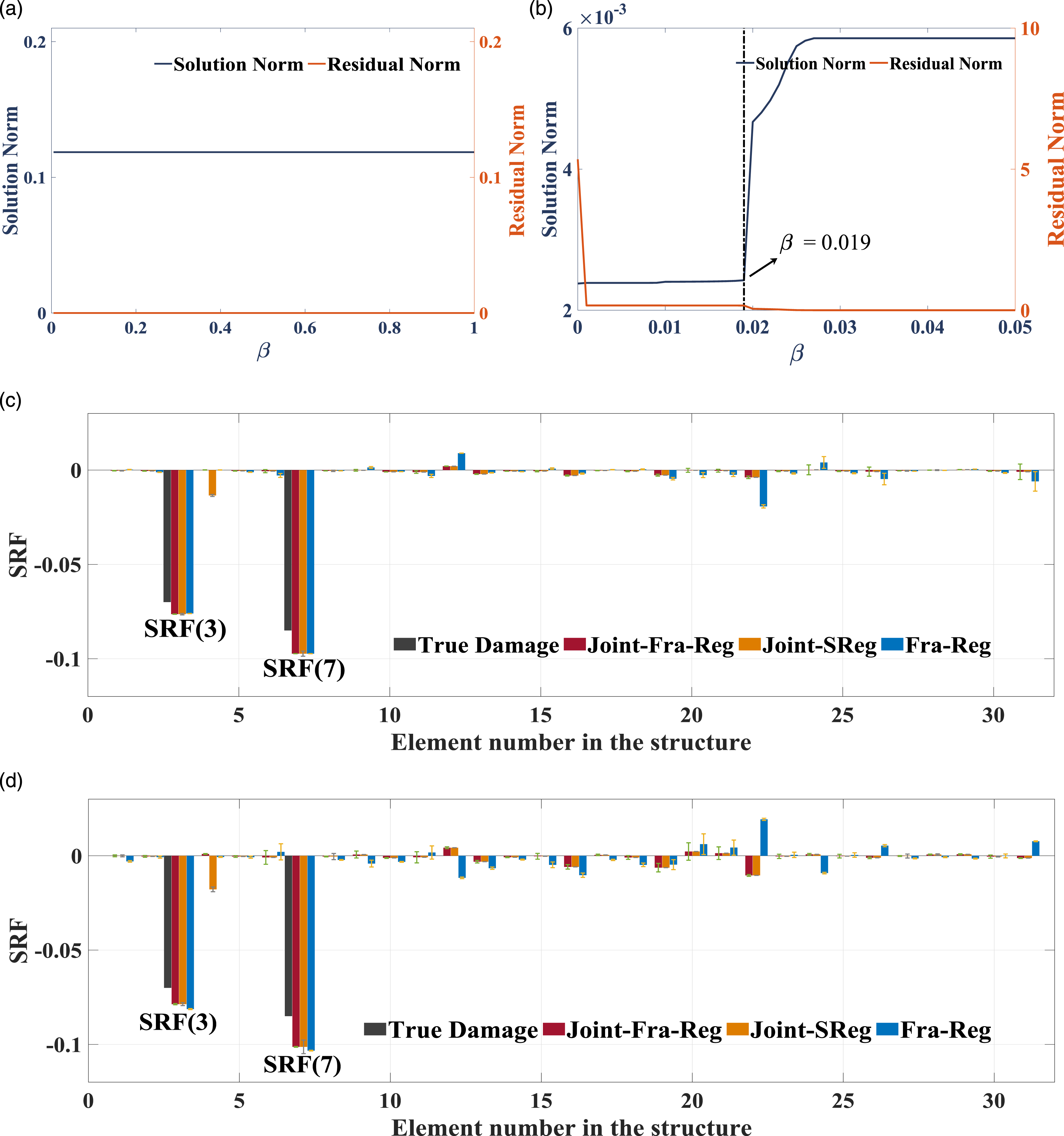
The results of 50 repeated tests on Noise Level 1 and Noise Level 2 are presented in Figure 3(c) and (d), respectively. In these figures, the mean values are represented by bars, while the standard deviations obtained from the 50 tests are depicted as short thin horizontal lines.
The comparison among damage identification results estimated by three models on Noise Level 1 and the true damage is shown in Figure 3(c). As can be seen from the figure, all the three models identify the damage at elements 3 and 7, but there are identification errors at elements 4, 19 and 22 in the damage identification results of the Joint-SReg model, and serious identification errors at elements 12, 22, 26 and 31 in the damage identification results of the Fra-Reg model. However, there is no obvious damage error in the damage identification results of the Joint-Fra-Reg model. The damage identification error δ of Joint-Fra-Reg model, Joint-SReg model and Fra-Reg model are 1.97%, 7.60% and 6.49%, respectively. So the damage identification quality of the Joint-Fra-Reg model is higher.
The comparison among damage identification results estimated by three models on Noise Level 2 and the true damage is shown in Figure 3(d). The results show that all the three models can identify the damage of elements 3 and 7, but they are disturbed by noise. There are serious identification errors at elements 4, 16, 19 and 22 in the damage identification results of the Joint-SReg model, and several serious identification errors at elements 12 to 31 in the damage identification results of the Fra-Reg model. However, there are only slight damage errors at elements 16, 19 and 22 in the damage identification results of the Joint-Fra-Reg model. The damage identification error δ of Joint-Fra-Reg model, Joint-SReg model and Fra-Reg model are 4.70%, 16.25% and 12.21%, respectively. Therefore, the damage identification quality of the Joint-Fra-Reg model is higher.
Finally, Figure 4 summarizes the damage identification errors δ estimated by different models on different noise levels in the two damage scenarios and the reduction of damage identification errors δ of the proposed model compared with the previous models. Damage identification results estimated by different models on different noise levels in two damage scenarios in the numerical study: (a) the comparison of damage identification errors δ estimated by different models on different noise levels in two damage scenarios. (b) the reduction of damage identification error δ of the proposed model on different noise levels in two damage scenarios compared with the previous models.
Figure 4 shows that, in damage scenario 1, the damage identification error δ estimated by the Joint-SReg model affected by Noise Level 1 is 3.88%, that estimated by the Fra-Reg model is 3.53%, and that estimated by the Joint-Fra-Reg model is 3.19%. The errors are reduced by 0.69% and 0.34%, respectively. The damage identification error δ estimated by the Joint-SReg model affected by Noise Level 2 is 6.93%, that estimated by the Fra-Reg model is 7.31%, and that estimated by the Joint-Fra-Reg model is 5.65%. The errors are reduced by 1.28% and 1.66%, respectively.
In damage scenario 2, the damage identification error δ estimated by the Joint-SReg model affected by Noise Level 1 is 7.60%, that estimated by the Fra-Reg model is 6.49%, and that estimated by the Joint-Fra-Reg model is 1.97%. The errors are reduced by 5.63% and 4.52%, respectively. The damage identification error δ estimated by the Joint-SReg model affected by Noise Level 2 is 16.25%, that estimated by the Fra-Reg model is 12.21%, and that estimated by the Joint-Fra-Reg model is 4.70%. The errors are reduced by 11.55% and 7.51%, respectively. The numerical study results presented above demonstrate the superior performance of the proposed model in structural damage identification.
Experimental study
Model description
In this section, a cantilever beam as shown in Figure 5(a) is conducted to further validate the effectiveness of the proposed model. The cantilever beam structure used here is presented in Li et al. (2023c). The material/geometry properties of the fixed end beam are given as follows: the length is 0.6 m, the cross-section has a shape of 0.055 × 0.005 m2, the Young’s modulus is estimated as 2.1 × 1011 N/m2, and the density of the material is 7850 kg/m3. The experimental cantilever beam and the experimental equipment: (a) Photo of the cantilever beam; (b) Signal acquisition instrument; (c) dynamic signal amplifier; (d) modal analysis system.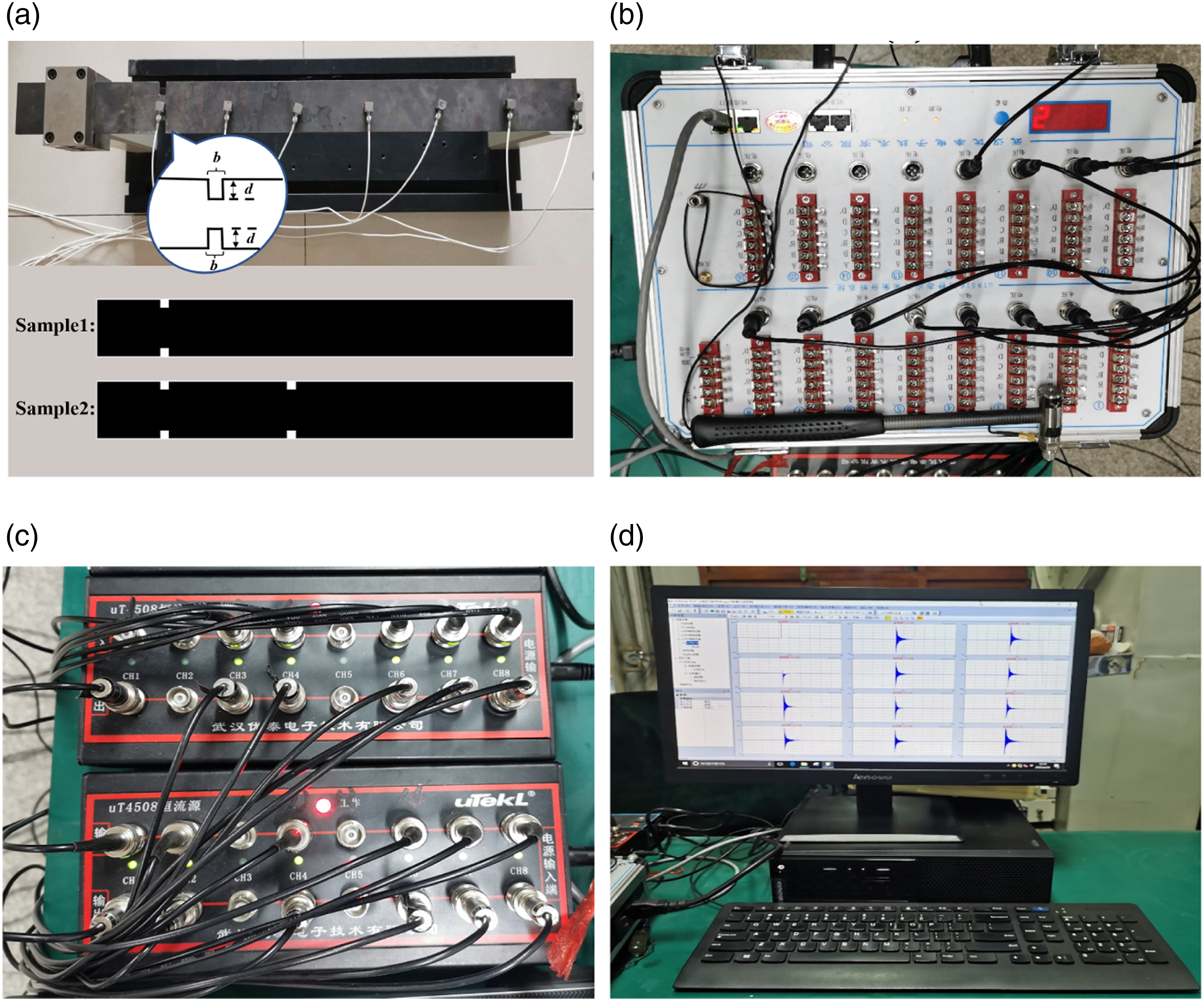
As shown in Figure 5(a), two damage scenarios are prefabricated into the cantilever beam, which are sample 1 and sample 2. All the damage are prefabricated in the form of cuts on the beam structure. As shown in Figure 5(a), it is assumed that the width of the cut is b, the depth is d, and the width of each cut is the same, which is 0.01 m, but the depths are different. Different depths simulate different damage severities, so the damage severity of each cut is reflected by the reduction in the moment of inertia of the cross-section.
The beam is modeled as an Euler-Bernoulli beam with 60 elements (i.e., N
ele
= 60), and each element length is 10 mm. As shown in Figure 6, the beam elements are numbered from 1 to 60 from clamped end to free end. Based on the FE model, the details of the two damage scenarios are as follows: there is only one cut on sample 1, located at the location of element 9; there are two cuts on sample 2, located at the locations of element 9 and element 25. The above two damage scenarios are represented by DS1 and DS2, respectively, specific situations are presented in Table 3. Configuration of the planer simply supported truss. The damage scenarios in the experimental study.

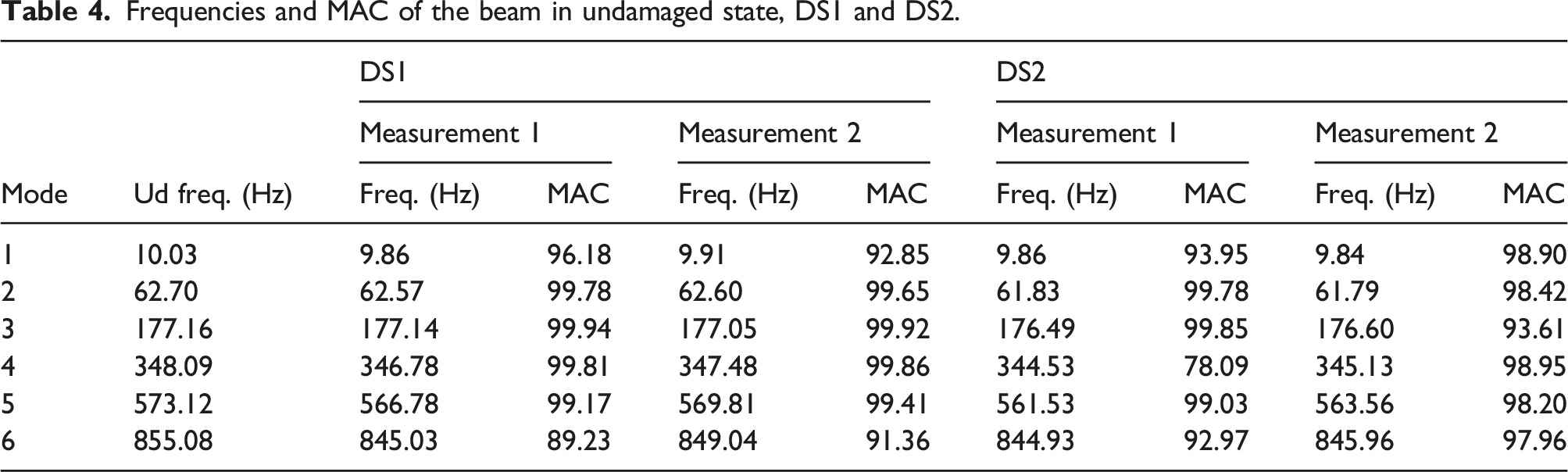
Frequencies and MAC of the beam in undamaged state, DS1 and DS2.
Modal data of the experimental model and initial FE model.
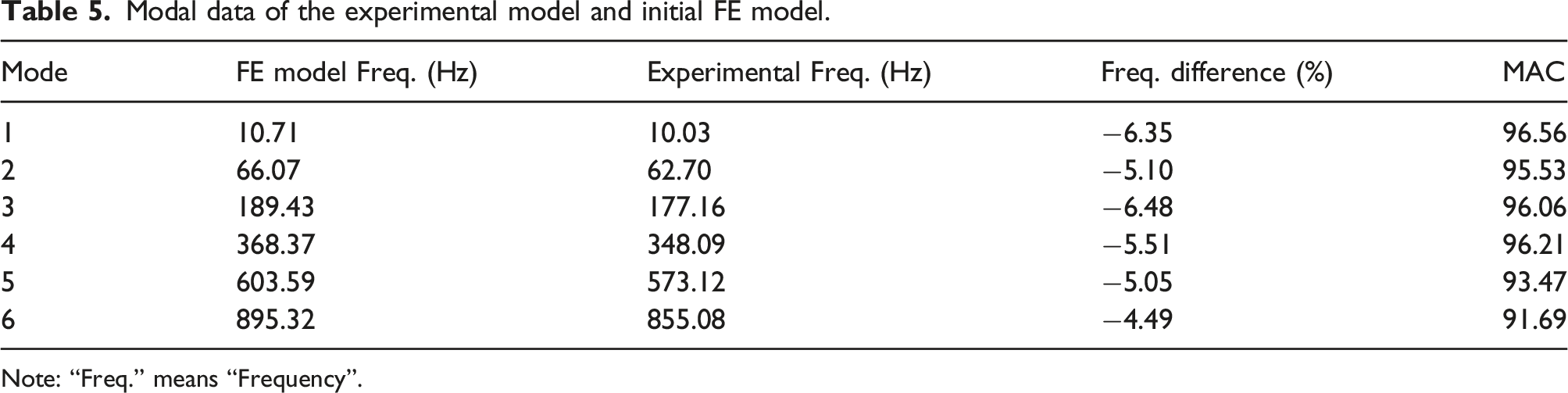
Note: “Freq.” means “Frequency”.
Damage identification for damage scenario 1
Damage scenario 1 is a single damage scenario, and 27.3% damage is introduced in element 9 (i.e., SRF(9) = −0.273). According to the conclusions obtained in the numerical study in this paper, the Fra-Reg model and the Joint-Fra-Reg model are endowed with stability with respect to the sparse regularization parameter β when
Figure 7 shows the comparison among the damage identification results estimated by the Joint-Fra-Reg model, the Joint-SReg model, the Fra-Reg model and the true damage, which are represented by Joint-Fra-Reg, Joint-SReg, Fra-Reg and True Damage, respectively. The x axis represents 60 elements. The y axis represents the SRF of each element. Figure 7 shows that, for the Joint-SReg model, although the model identifies the damage at element 9, there are different degrees of false damage identification results at elements 1, 8 and 53, so the damage identification error is large. For the Fra-Reg model, although the model identifies the damage at element 9, there are different degrees of false damage identification results at elements 4 and 8, and the damage identification error is large. For the Joint-Fra-Reg model, although there is a small damage identification result at element 8, the model accurately identifies the damage at element 9, which reflects the superiority of fraction function in structural damage identification. SRFs of Joint-Fra-Reg model, Joint-SReg model and Fra-Reg model in DS1 (the damage identification error δ of Joint-Fra-Reg model, Joint-SReg model and Fra-Reg model are 3.67%, 4.24% and 4.83%, respectively).
Damage identification for damage scenario 2
Damage scenario 2 is a multiple damage scenario, and 27.3% damage is introduced into elements 9 and 25 (i.e., SRF(9) = SRF(25) = −0.273). The sparse regularization parameter β of the Fra-Reg model and the Joint-Fra-Reg model is the same as that in damage scenario 1, and the sparse regularization parameter β of the Joint-SReg model is the same as that in the paper Li et al. (2023c) (i.e., β = 0.0045).
Figure 8 shows the comparison among the damage identification results estimated by three models and the true damage. The x axis represents 60 elements. The y axis represents the SRF for each element. Figure 8 shows that, for the Joint-SReg model, although the model identifies the damage of elements 9 and 25, the damage severity identified at element 25 is far less than the true damage severity, which presents a huge security risk for the practical application. In addition, there are large degree of false damage identification results in elements 1 and 10, so the damage identification error is large. For the Fra-Reg model, although the model identifies the damages at elements 9 and 25, there is an obvious false damage identification result at element 8, and the damage identification error still needs to be reduced. For the Joint-Fra-Reg model, there is no obvious false damage identification result and the model accurately identifies the damages at elements 9 and 25, which reflects the superiority of Joint-Fra-Reg model in structural damage identification, especially in multiple damage scenarios. SRFs of Joint-Fra-Reg model, Joint-SReg model and Fra-Reg model in DS2 (the damage identification error δ of Joint-Fra-Reg model, Joint-SReg model and Fra-Reg model are 12.59%, 17.12% and 14.81%, respectively).
Figure 9 shows the δ estimated by different models in two damage scenarios and the reduction of the damage identification errors δ of the proposed model compared with the previous models. Figure 9(a) and (b) show that, in damage scenario 1, the δ estimated by the Joint-SReg model is 4.24%, that estimated by the Fra-Reg model is 4.83%, and that estimated by the Joint-Fra-Reg model is 3.67%, which reduces the error by 0.57% and 1.16%, respectively. In damage scenario 2, the δ estimated by the Joint-SReg model is 17.12%, that estimated by the Fra-Reg model is 14.81%, and that estimated by the Joint-Fra-Reg model is 12.59%, which reduces the error by 4.53% and 2.22%, respectively. In general, the δ of the proposed model is reduced by 2.55% and 1.69% on average compared with the previous models, respectively. Damage identification results estimated by different models in two damage scenarios in the experimental study: (a) the comparison of damage identification errors δ estimated by different models in two damage scenarios; (b) the reduction of damage identification error δ of the proposed model compared with the previous models in two damage scenarios.
Conclusions and discussions
A joint fraction function regularization model for structural damage identification is proposed in this paper. The similarity among the different measurements and the fraction function regularizer are considered in the proposed model. Compared with the previous models, the drawbacks of the similarity among different measurements being ignored and l1-norm regularizer excessively punishing are overcome, simultaneously, which further improves the structural damage identification performance. The numerical study on a six-span planar truss structure and the experimental study on a cantilever beam structure show that, compared with the previous sparse regularization models, the damage identification errors of the proposed model are reduced by 4.15% and 2.12% on average, respectively.
Although the proposed model further improves the accuracy of damage identification compared with the previous models, there are still some problems that can be optimized in practical applications. Firstly, the sensitivity matrix S is related to the damage state because of the nonlinear relationship between the changes in modal parameters and the damage parameter. Therefore, it is beneficial to update the sensitivity matrix S during the solution process. Future researches should consider the updating of the sensitivity matrix S. Secondly, the influence of temperature on the modal parameters of the structure could be considered. Finally, damage identification methods without considering undamaged structures could be further studied. Future researches could be carried out from the above aspects.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is partly supported by the Open Fund of China Highway Engineering Consulting Group limited company (zzyhyfzx-2022-03), the Scientific Research Fund of China Highway Engineering Consulting Group limited company (zzkj-2022-02).