
Abstract
In the long-term services of offshore engineering structures, it is inevitable to be affected by the complex offshore environment, which may lead to a reduction in local or overall structural strength. The research on structural health monitoring of offshore engineering structures can detect damage in time, which is of great significance to ensure the normal offshore operations, and is also an important part of the integrity management. In this paper, existing methods and techniques for identifying offshore environmental parameters are reviewed. Then, the analysis of offshore dynamic response is mainly summarized in terms of modal parameter identification, motion status, and strain/stress monitoring. Damage identification methods for offshore structures in terms of corrosion, cracks, and local strength reduction are introduced. Finally, some suggestions for future research on offshore structural health monitoring are put forward. This paper presents a review of existing technologies in structural health monitoring for offshore engineering, with particular emphasis on research into dynamic response monitoring and damage detection. The aim is to provide references and guidance for practical applications in related fields.
Keywords
Introduction
Structural health monitoring (SHM) is the process of evaluating the status and integrity of a structure based on field measurement data, which provides a timely understanding of the operational status of the structure and helps reduce maintenance costs. In recent years, with the depletion of resources of land, scholars have turned focus to the sea. Offshore structures, such as offshore oil and gas platforms, offshore wind farms, submarine pipelines and cables, and transport vessels, play an important role in the field of energy development and transmission. However, these structures are explored to the ocean for a long time and affected by natural loads such as wind, wave and current as well as human factors, which may lead to damage and even failure (Nassiraei and Rezadoost, 2021; Nejad et al., 2021). Therefore, the development of monitoring technology for offshore structures plays a crucial role in ensuring the operation safety and the integrity management (Bao et al., 2021).
The monitoring of offshore structure can be traced back to 1990, Peters et al. (Peters et al., 1990) deployed an integrated monitoring system on the Jolliet tensioned leg drilling platform to monitor platform performance, ocean meteorology and ocean driving force. Subsequently, scholars of various countries carried out monitoring in the Gulf of Mexico, the North Sea, Brazil and other nearby seas to record environmental parameters, structural response, riser tension and mooring system shape. SHM of offshore structures can detect structural damage in time, assess structural safety, and predict structural performance changes and remaining life. At present, many monitoring methods for offshore structures have been developed, including (1) research on marine meteorology, such as wind, waves, internal waves, ice, tide, etc.; (2) research on modal identification; (3) stress and strain monitoring; (4) monitoring of offshore structural damage, including crack, corrosion and local damage.
From a SHM perspective, marine environmental loads are the primary excitation that drive both the measurable structural responses and the long-term damage evolution of offshore structures (Hu and Kareem, 2022). Therefore, the identification and monitoring of these loads form the first layer of SHM information. These load descriptors are not only used as direct monitoring quantities, but also used to interpret response-based and damage-based indicators and to separate environmental variability from structural degradation (Leng et al., 2025). For this reason, the next section first reviews monitoring techniques for marine environmental loads, then the research on the dynamic response analysis and damage detection under the action of loads. Together, they provide an integrated view of SHM for offshore engineering structures.
This paper reviews the research of SHM of offshore structure from 2015 to 2025. Firstly, the monitoring methods and technologies for marine environmental parameters is introduced. Then, the dynamic response analysis methods for offshore structures is reviewed. In addition, this paper discusses the damage monitoring techniques. Finally, the current research progress is summarized and prospects are presented.
Marine environmental loads
In this section, the existing monitoring techniques for marine environmental parameters are summarized. It should be noted that most existing studies focus on single environmental factors. In the actual marine environment, the coupling effects of wind, wave, and current are significant, often leading to nonlinear structural responses that are difficult to predict by superimposing single loads. This remains a gap in current load identification.
Wind
Wind is a major component of the environmental load. In the design of offshore structures, international marine and offshore engineering standards are the main references tools. In view of the current standards and calculation procedures that treat wind as quasi-stable and ignore the relevant parameters of atmospheric turbulence in nature, Kozmar (Kozmar et al., 2022) took relevant international standards, rule-based procedures, and actual wind data as input conditions to calculate the environmental loads acting on single-pile offshore wind turbines (OWT). Li et al. (Li et al., 2022a) used the observation data of offshore platform to analyze the changes of the average wind field, turbulence and turbulence flux of three typhoons landing in Guangdong, and discussed the influence of the average wind direction on the turbulence fluctuation intensity and friction velocity of the typhoon boundary layer. Field measurement provides the most authentic data but is restricted by the scarcity of measuring points and the high cost of maintenance in harsh environments (Jiang et al., 2021). In contrast, existing standards are convenient but often conservative, failing to capture the complex transient effects of turbulence, which suggests a need for more refined aerodynamic models.
For nearly 50 years, many scholars have applied Computational Fluid Dynamics (CFD) to the evaluation of wind load, which has grown rapidly recently (Guo et al., 2021a). Wnek et al. (Wnek and Soares, 2015) studied the wind load of two kinds of ship models using CFD, and compared the results with the wind tunnel experiments. Janssen et al. (Janssen et al., 2017) conducted a three-dimensional stable RANS CFD simulation of the wind load on container ships, discussed the influence of simplifying the hull and deck container stacking on the results, and studied the blocking effect caused by the domain boundary. Although CFD has become a powerful tool to complement experimental data, a major limitation lies in the Reynolds number effect (Zhao et al., 2023). Most CFD studies and wind tunnel tests are performed at model scale, and extrapolating these results to full-scale offshore structures involves uncertainties. Furthermore, the accuracy of CFD heavily depends on the selection of turbulence models and mesh quality, which requires rigorous validation against field data.
In addition to deterministic descriptions based on standards and CFD, random wind loads are often modelled as stochastic processes when analysing and identifying the dynamic response of offshore structures. In this context, the turbulent wind field is usually characterised by power spectral density (PSD) functions and coherence models, or simulated in the time domain using spectral representation and multivariate ARMA-type models (Ma and Liu, 2025; Wang et al., 2025). Such stochastic wind models provide not only realistic input for fatigue and ultimate limit state assessments, but also a natural framework for integrating wind effects into SHM.
Wave
The significant height and peak time of wave are the main factors affecting the response of offshore structure. The current wave monitoring technology mainly includes the measurement of various sensors and the indirect method of estimating wave height.
The development of wave sensors mainly includes the buoys with accelerometers or Global Positioning System (GPS). In recent years, many scholars have developed wave monitoring sensors and took them to the measurement of wave in the actual sea. While sensors like buoys offer high reliability, they suffer from high deployment costs and vulnerability to extreme weather. Bio-inspired sensors offer a novel solution for power supplies. However, their long-term stability and measurement precision in complex sea states still require further verification compared to mature commercial sensors (Chen et al., 2024; Jensen et al., 2021; Yurovsky and Dulov, 2020).
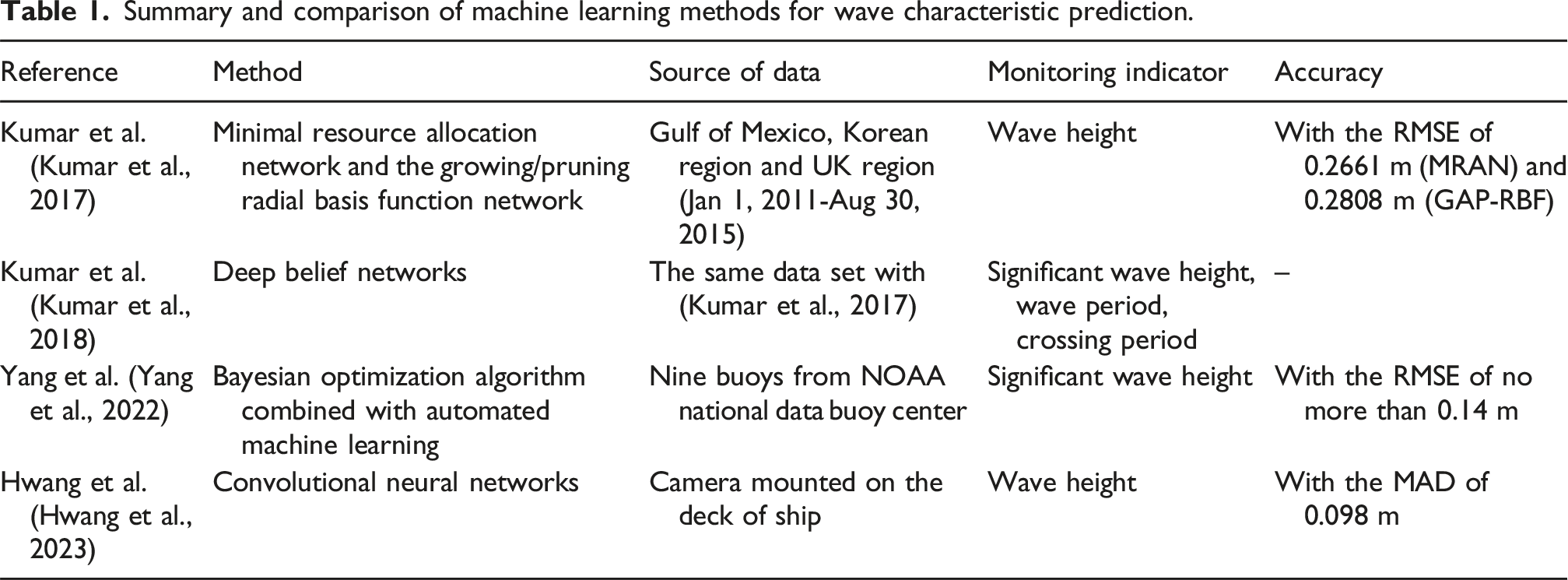
Summary and comparison of machine learning methods for wave characteristic prediction.
Ice
Ice load is the main control load for the safe operation of ships and offshore structures in the ice area. Wide structures (such as gravity platform, semi-submersible platform, etc.) are usually adopted to resist the severe polar sea ice conditions. The structure-ice interaction process is complex, it is necessary to pay attention to the overall and local ice load of the structure in the design of structural ice resistance (Wang et al., 2018c). Wang et al. (Wang et al., 2018a) analyzed the dynamic characteristics of the platform under different ice excitation levels based on the long-term measured response of the ice-structure interaction. The results show that the inherent nonlinearity of the structure varies with excitation amplitude and bandwidth. It can be seen that monitoring of ice load is of great significance for the health assessment of offshore structures. Figure 1 shows the timeline of research on ice loads over the past 10 years. It can be seen that research on the monitoring technology of ice load mainly includes numerical simulation and the establishment of ice force prediction model. Moreover, image identification and machine learning are also used in the study of ice loads (Kim and Nam, 2020; Wang et al., 2023b). Current numerical simulations often simplify ice constitutive models, leading to discrepancies with reality. Moreover, the applicability of image identification techniques is severely limited by visibility. In polar regions, frequent fog, snow, and polar night conditions can render visual-based monitoring ineffective. Future research should focus on fusing multi-source data to ensure robustness. Timeline of the study on ice loads in offshore structure in the last decade (Chai et al., 2018; Jiang et al., 2024, 2025; Kotilainen et al., 2017; Long et al., 2023; Tsarau et al., 2014; Wang et al., 2018b, 2022a, 2023b; Wu et al., 2021; Xu et al., 2020; Yu and Amdahl, 2021).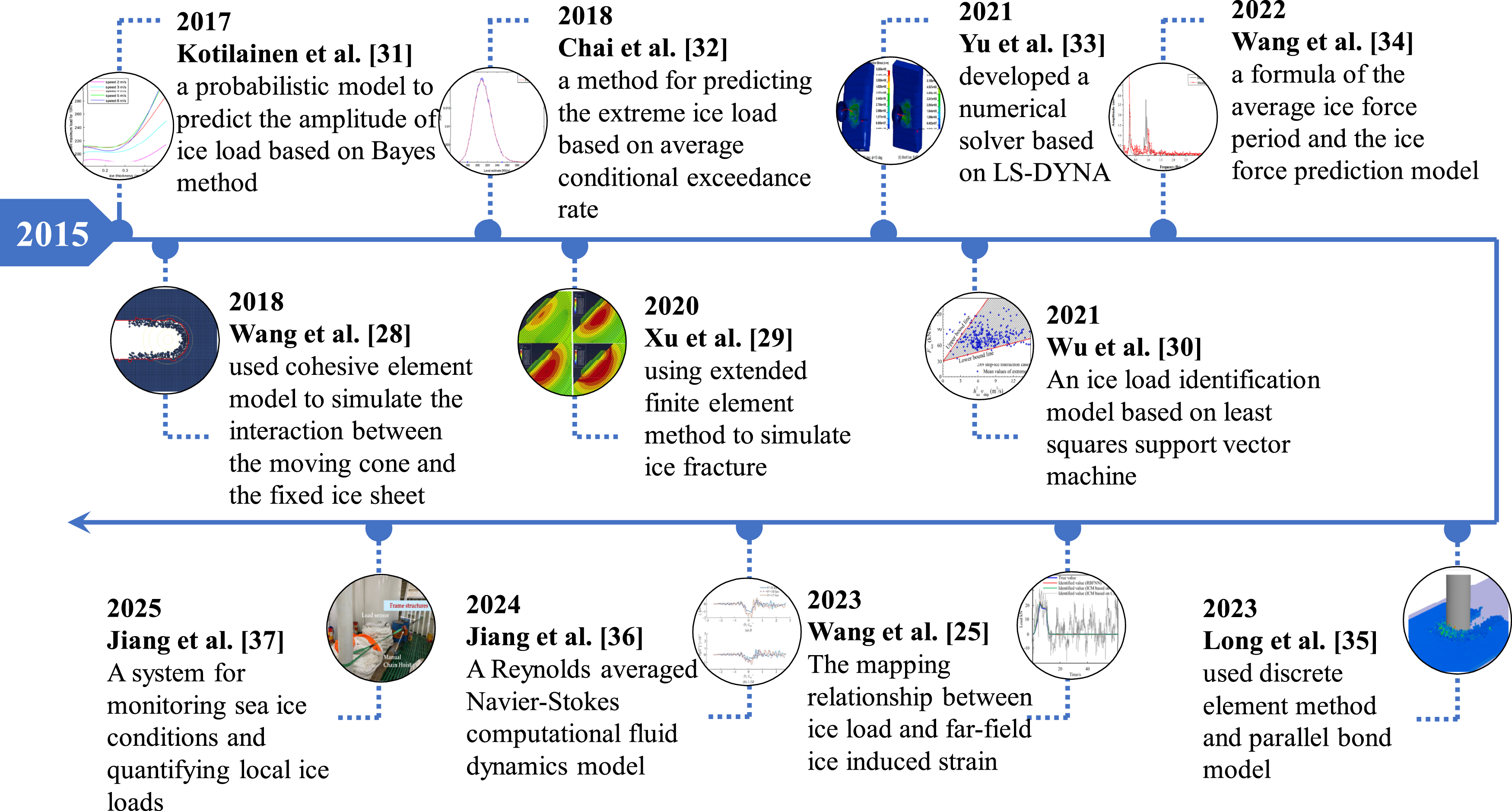
For ice loads, the highly intermittent and stochastic nature of ice–structure interaction has also motivated the development of random load models. Instead of prescribing deterministic ice forces, these studies represent ice-induced loads as stochastic processes that account for random breaking patterns(Chu and Lindenschmidt, 2019), intermittent contact (Hossain and Taylor, 2024) and switching between crushing and bending failure modes (Teo et al., 2017). In such models, ice loads are often described by stochastic differential equations, random pulse trains or Markov-type switching processes, and their spectra are used as input for dynamic response and fatigue analyses. Within an SHM context, these stochastic ice load models can be combined with measured structural responses to identify key parameters and to update reliability assessments of structures.
Structural dynamic response analysis
The dynamic response monitoring can obtain the response law of the structure with dynamic load, in which the modal parameters can reflect the dynamic characteristics of the structure. The service status of the structure can be obtained and the damage of the structure can be found in time by analyzing the changes of the modal parameters. In addition, the knowledge of structural dynamic response, including displacement, acceleration, stress and strain, helps in acquiring the behavior of structures under the service period, predicting fatigue and damage accumulation during long-time service. In the section, the research progress of dynamic response monitoring of offshore structures in the last decade is reviewed and discussed.
Theory of structural dynamics
Firstly, the relationship between structural motion, strain and stress is established through theoretical analysis. The spatial discrete dynamic system of offshore structure can be represented by the following continuous time differential equation:

The relationship between strain mode and displacement mode can be used to obtain the strain time history. The two kinds of modes have the same frequency and damping ratio, but the mode expression is different. In the finite element, the strain vector at any point of the element can be expressed as a function of the displacement vector, the formula is as follows (Vettori et al., 2023):
Based on this, the strain time history can be obtained indirectly, the stress can be further obtained from the constitutive relationship of the material, which can be used to evaluate the fatigue damage of offshore structures.
Modal parameter identification
Modal identification of offshore structures has always been a focus of attention. The dynamic characteristics of offshore structures will vary with time because of the time-varying environmental loads such as wave, wind and currents, as well as the change of soil hardness. For large and complex engineering structures, extracting modal parameters from output data is a common method because of the difficulty in measuring input forces.
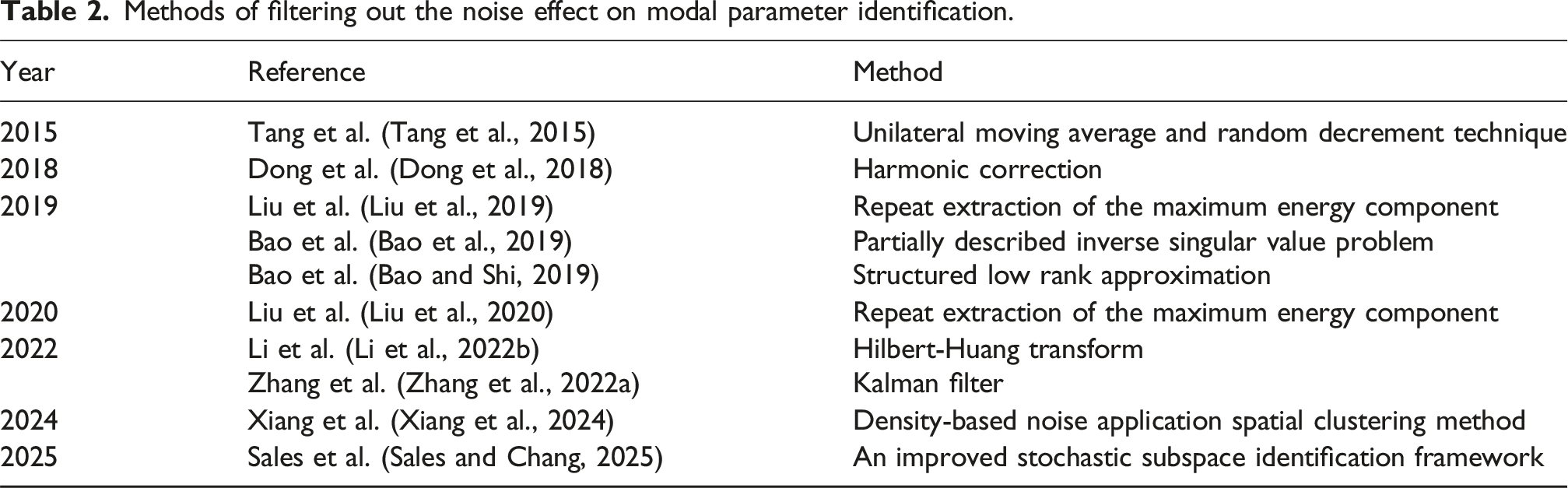
Methods of filtering out the noise effect on modal parameter identification.
At present, the modal identification research of offshore structure mainly includes natural excitation technology and modal parameter identification under different operating states, which is also the covered aspects of the chapter.
Natural excitation technology
Conventional natural conditions
In terms of identifying structural modal parameters by natural excitation, there have been many researches. Stochastic subsequence method (SSI) is the most commonly used method for modal identification, Zhang et al. (Zhang et al., 2022a) adopted Kalman filter to remove noise from the response of OWT under environmental excitation, then adopted RDT-SSI method to obtain modal parameters. Dong et al. (Dong et al., 2018) discussed the rules of structural response and vibration characteristics under different working conditions based on the observed long-time displacement of the prototype, and proposed harmonic modified SSI (HM-SSI) to remove the interference of harmonic components. Xiang et al. (Xiang et al., 2024) proposed a random SSI-based method and density-based noise application spatial clustering method (DBSCAN) to remove noise modes, so as to identify the modal parameters of OWT accurately. In addition, in order to obtain accurate modal parameters, many methods have been proposed for filtering equipment and environmental noise, as shown in Table 2.
Extreme natural conditions
There are also some researches on modal parameter identification with special environmental excitation. In order to solve the uncertainly problem with ice-structure interaction, Yang and Wang (Yang and Wang, 2020) compared the performance of multi-reference complex exponential method, feature system implementation algorithm, instrumental variable method, covariation-driven SSI method and data-driven SSI method systematically using the measured response data of offshore jacket platform (JZ20-2MUQ) caused by natural ice load. Wang et al. (Wang et al., 2023a) introduced Sihouette and robust outlier detection technology on the basis of the traditional SSI-cov method to improve the accuracy of identification results. For the research on the modal parameter identification based on the response generated by typhoon excitation, Qu et al. (Qu et al., 2022) proposed a method to eliminate the influence of sea breeze using wind speed spectrum and correlation function. Based on the dynamic response of OWT under unexpected seismic excitation, Xu et al. (Xu et al., 2022) adopted SSI to reveal the modal parameters of the structures before, during and after the earthquake. The identified high-frequency modes can quantify the changes of foundation stiffness.
The research on modal identification of offshore structures excited by harsh environment can provide a basis for the design, monitoring and maintenance of structures in ice areas, typhoon-prone areas, seismically active areas and so on. A critical challenge in modal identification for offshore structures is the inherent time-varying and non-stationary nature of environmental excitation. Although there are some methods that can effectively filter noise and improve accuracy under stationary conditions, they often struggle to track the subtle, continuous changes in modal parameters induced by factors like tidal variations, soil scour, or water level fluctuations. Furthermore, the identified modal parameters are highly sensitive to the method used, and a comparative study on the robustness of these methods under varying signal-to-noise ratios (SNRs) remains a necessary research direction.
Different operating states
The study of vibration characteristics of offshore structures under different operating conditions can explain the relationship between modal parameters and operating conditions, provide powerful data and technical support for the operational safety evaluation, and provide necessary theoretical and practical basis for the design and maintenance of structures. Gao et al. (Gao et al., 2021a) used the measured OWT acceleration at different installation stages to fit the displacement to remove the drift term through Chebyshev polynomials, and proposed SSI method based on reconstructed displacement. In the same year, in order to improve the high-order accuracy of the response and the accuracy of identification results, the complex exponential function was used to fit the external loads so that the dynamic response components could be expanded by high-order Taylor (Gao et al., 2021b).
In the field experiments of offshore structure, it is difficult for environmental load to excite the real mode due to the large stiffness of structure, therefore, it is the most used method to increase the impact energy by engineering ships. Li et al. (Li et al., 2022b) carried zero-order correction and high-pass filtering on the structural acceleration caused by ship collision, then converted it into displacement, and used the modified displacement to identify modal parameters. Zhou et al. (Zhou et al., 2019) used weak mode identification method to identify the modal parameters of structures under artificial excitation and random wave excitation, which showed stronger identification ability than SSI method.
Motion status monitoring
The motion state of offshore structure is one of the most important measurement indexes to describe the dynamic characteristics in structural engineering, which can be directly transformed into strain and deformation, and provide useful information of the structure. At present, the monitoring of the movement of offshore structures can be obtained by Global positioning system (GPS), inertial navigation system (INS), acoustic positioning system (APS), Lidar, satellite and so on. However, the above techniques mainly focus on the attitude, position, movement trajectory and distribution of offshore structures, which are not enough for the dynamic response analysis. The analysis of the motion state of the structure can be based on the vibration equation, which is described briefly in Section 3.1. The current research mainly includes theory, simulation and experiment. In practice, the computational cost, model transparency and ease of integration into existing SCADA and monitoring infrastructure are important constraints that influence the choice between purely physics-based and data-driven approaches.
Theoretical research
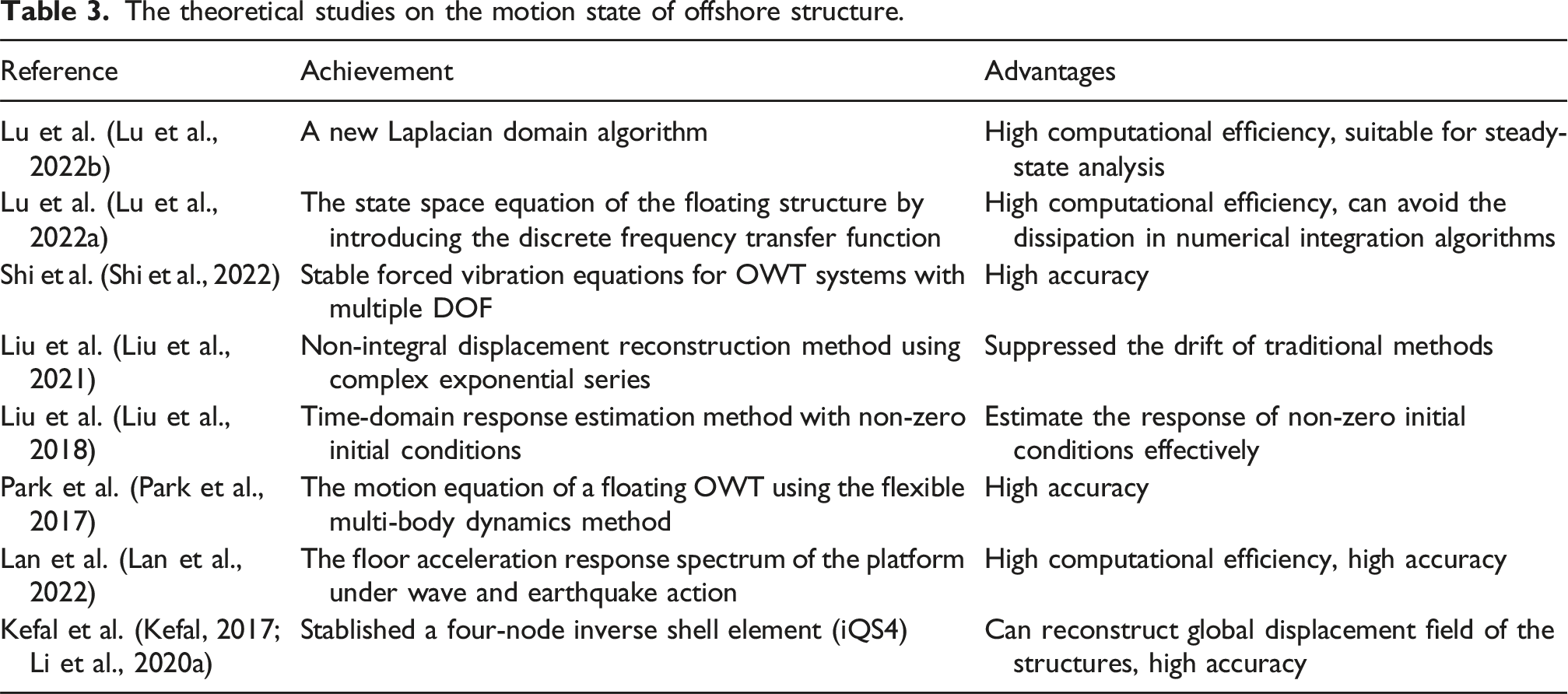
The theoretical studies on the motion state of offshore structure.
In addition, some machine learning methods have been used to the response estimation of offshore structure. Wang et al. (Wang et al., 2022b) proposed an identification method of tower top acceleration and tower foot force based on the deep learning (DL) using the coupling relationship between tower force and floating foundation motion. Guo et al. (Guo et al., 2021b) developed a machine learning model based on long short-term memory (LSTM) to predict the fluctuation and surge motion of semi-submersible vehicles. Subsequently, the DL model was extended using dropout layer, which can be used to predict the motion of the offshore platform in advance and accurately (Guo et al., 2022). Huang et al. (Huang et al., 2024) used the optimized traditional VMD method to decompose the response data of OWT under extreme conditions, eliminated modal components with similar complexity to reduce the calculation cost, and used the PSO-LSTM model to predict the motion of turbines with six degrees of freedom. Data-driven methods are adept at learning the complex, nonlinear mapping between input and response without explicit physics models. Conversely, they suffer from two major drawbacks: lack of generalizability and interpretability. Their performance degrades significantly when encountering data outside the training domain. This compromises their trustworthiness in safety-critical structural health assessments, demanding more physics-informed machine learning solutions.
Numerical simulation
From the point of view of numerical simulation, some scholars have analyzed the response of offshore structure under different marine loads, and explored the simulation techniques suitable for offshore structures. For example, Kimjaeuk et al. (kimjaeuk et al., 2021) simulated the jacket type OWT with FAST to obtain dynamic responses such as structural displacement and engine room acceleration under different conditions, and explored the dominant responses and the influence rules of wind and wave. Raheem (Raheem, 2016) conducted nonlinear analysis of the offshore fixed platform using finite element method, obtaining the dynamic response under conventional and extreme conditions as well as the distribution of displacement and internal force along the legs. Then, the peak response of offshore jacket platforms was obtained through PSD analysis (Raheem et al., 2022). Zhao et al. (Zhao et al., 2021b) conducted a least squares fitting analysis on the hydrodynamic response of jacket structure through physical model test, and improved the finite element model based on the obtained hydrodynamic coefficient. Subsequently, the strain, acceleration and displacement of the platform under three typical regular wave were calculated. Ren et al. (Ren et al., 2021) studied the effects of different simulation methods and jacket models on the internal force and displacement of the structure.
Experiment method
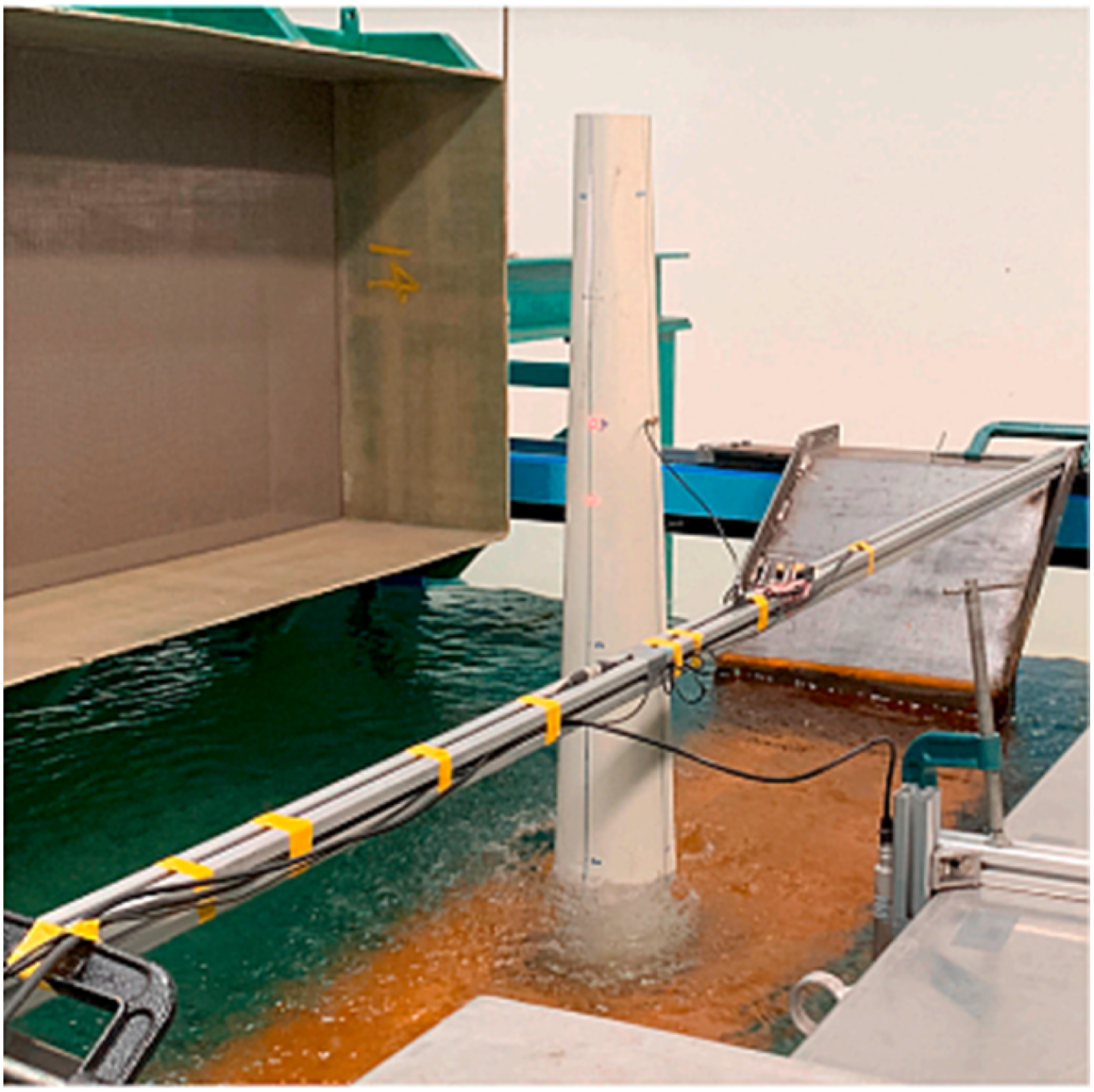
For the study of experimental methods, Zhang et al. (Zhang et al., 2019) derived hydroelastic similarity based on elastic similarity, Froude similarity and cross-section bending stiffness similarity, which was used to guide the experiment of a 10,000-ton offshore power platform under wind, wave and current. On this basis, Sun et al. (Sun et al., 2019) studied the dynamic characteristics of a million-ton offshore converter station under typical earthquake loads based on the physical model test. The acceleration and displacement of key parts were collected by data acquisition instrument combined with the strain gauge, acceleration sensor and laser displacement meter. The layout position of the sensor was shown in Figure 2. Based on the experiments, the effect of water, air, single and bidirectional seismic excitation on structural dynamic response were analyzed (Zhao et al., 2021a). Hu et al. (Hu et al., 2020) built a test platform (Figure 3) to simulate various loading states such as wind-wave, wind–current, wave-current and wind-wave-current for the first time, and measured the displacement, velocity and acceleration of the OWT model at three points on the tower wall to study the influence of different working conditions on the dynamic response. Xi et al. (Xibing et al., 2025) revealed the fluid-soil-wind turbine interaction mechanism and the influence on dynamic response through shaking table tests. Placement of sensor ref (Sun et al., 2019). Experimental model in ref (Hu et al., 2020).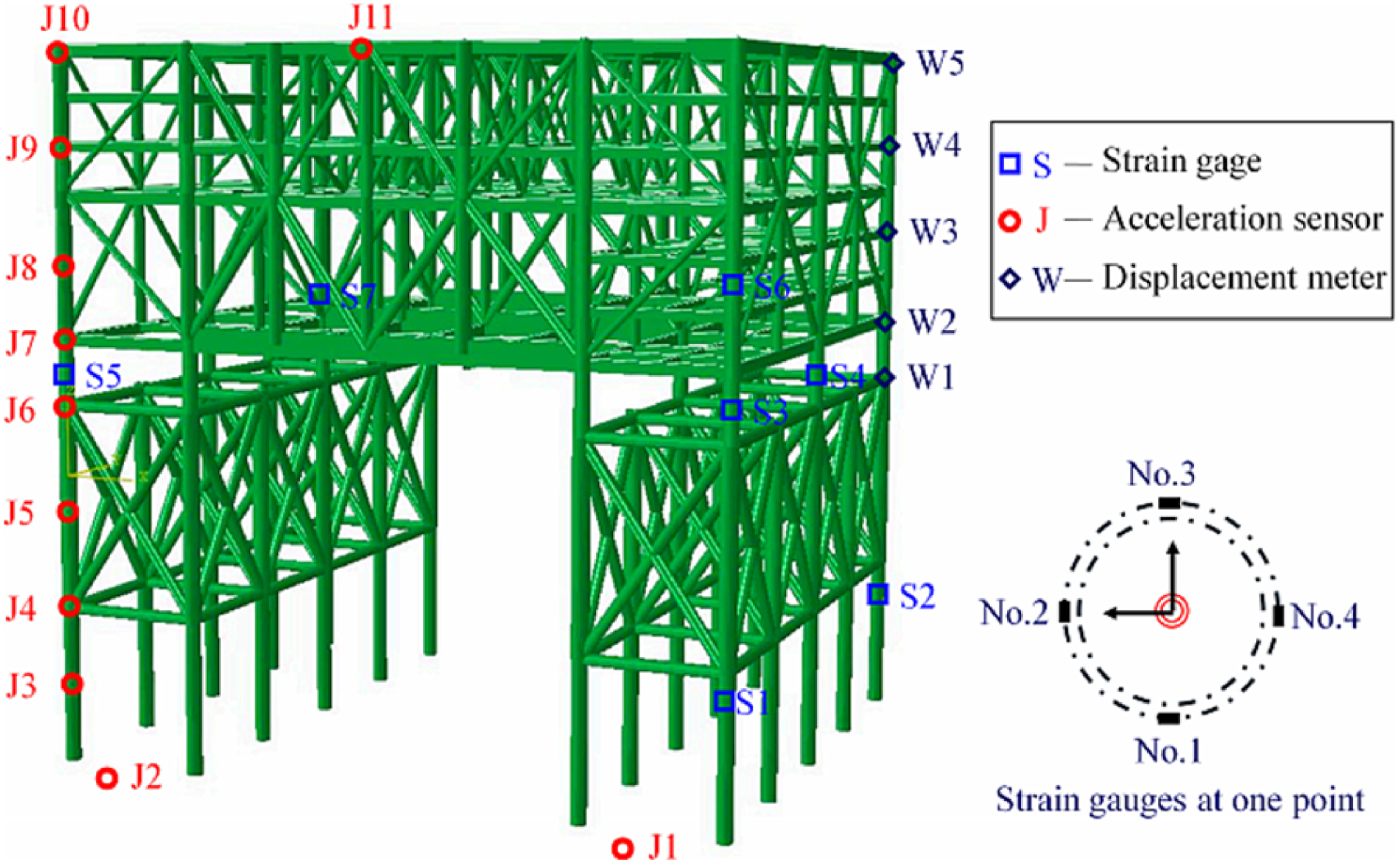
In addition to monitoring and analysing the motion status of offshore structures, a number of studies have proposed vibration control devices to mitigate structure vibrations. For example, Lei et al. (Lei et al., 2023) proposed a novel inner-platform tuned mass damper (TMD) for steel wind turbine towers and showed numerically that it can effectively reduce vibrations under wind and wave loads. Based on this research, Lei et al. (Lei et al., 2026) further studied vibration control of wind turbine towers using a nonlinear tuned liquid damper (TLD) with aero-elastic coupling. Although vibration control is not the main focus of the review, it is worth noting that the design and performance assessment of such devices strongly rely on reliable monitoring and identification of structural responses, which links closely to SHM techniques.
From a structural health monitoring perspective, motion status monitoring mainly provides global kinematic information of offshore structures, such as rigid-body translations, rotations and overall vibration amplitudes. These motion quantities are directly linked to internal forces and deformations through the structural dynamics relations introduced in Section 3.1. However, global motion is often insufficient to quantify local fatigue damage or to detect early-stage defects at critical details. For this reason, SHM systems typically combine motion measurements with strain/stress monitoring, which offers more localized and damage-sensitive indicators. Therefore, the next section focuses on methods for strain/stress monitoring that complement motion-based monitoring within an integrated SHM framework.
Strain/stress monitoring
Real-time monitoring of stress distribution and changes of offshore structures can detect potential damage and failures, such as stress concentration, crack initiation, etc., so as to take timely maintenance measures to avoid catastrophic accidents and ensure the safe operation of structures. This section addresses “strain/stress monitoring”, which targets structural responses at critical locations and provides more direct input for fatigue assessment and damage identification. At present, the research of stress/strain monitoring includes direct measurement and indirect identification methods.
Direct measurement
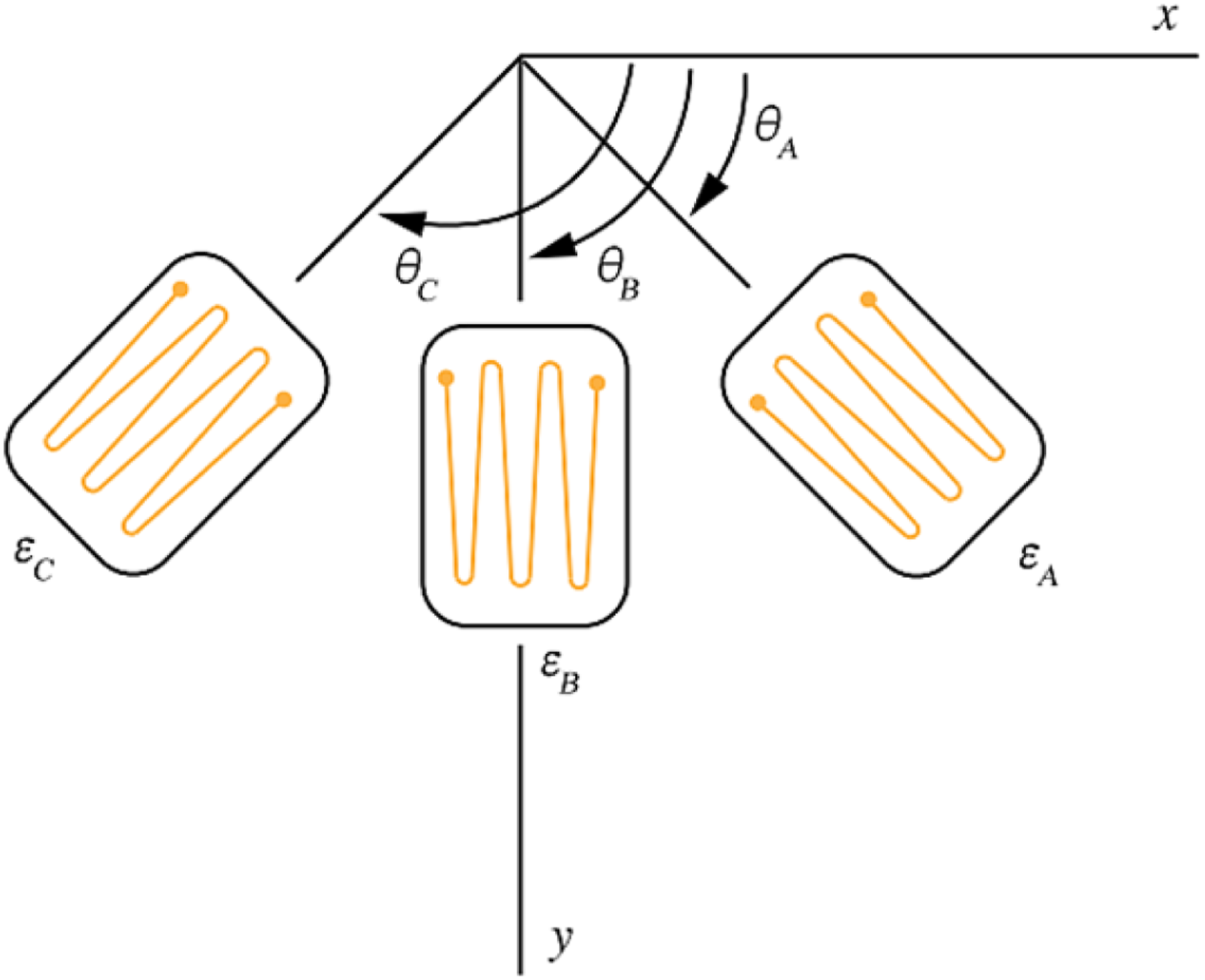
As mentioned earlier, using sensors for measurement is the most common method, which can provide the most accurate results for strain/stress. In 2015, Shen et al. (Shen et al., 2015) proposed two types of FBG strain rosette to measure the strain of hull plane, as shown in Figure 4. The type and size of the strain rosette were optimized by analyzing the factors affecting the strain transfer ratio. Subsequently, Brewick et al. (Brewick et al., 2022) proposed the structure of strain rosette as shown in Figure 5, which was laid on the hull to predict the local pressure. While direct measurement provides high-fidelity local information, it is fundamentally limited by sensor placement and durability. For large offshore structures, it is economically and practically impossible to cover all critical areas, especially in the high-stress areas underwater, which has accelerated the development of virtual sensing techniques for structural response identification. structure of FBG strain rosette proposed in (Shen et al., 2015). Typical strain gauge rosette set-up proposed in (Brewick et al., 2022).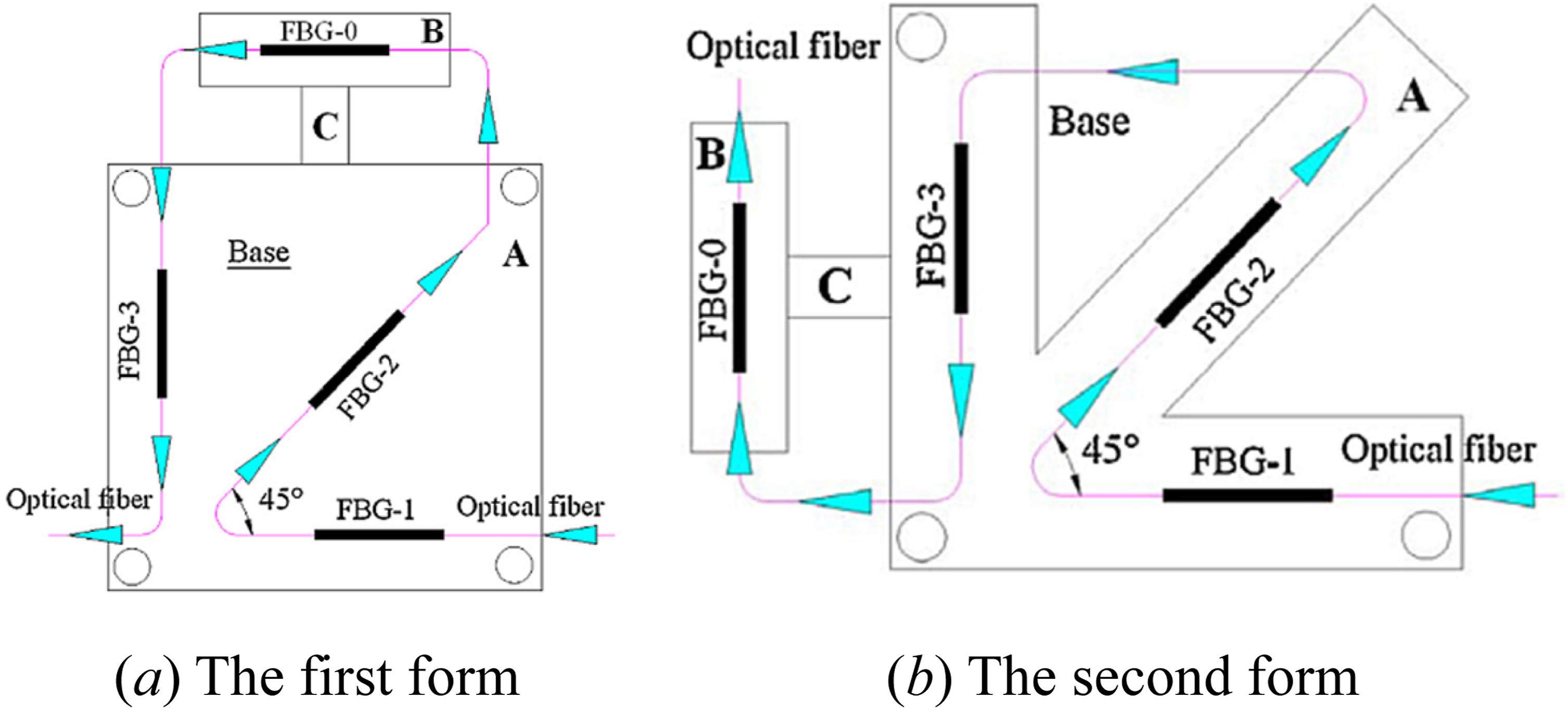
Virtual sensing
Study on strain/stress identification of offshore structures.
Inverse finite element method
iFEM is usually used to reconstruct the strain field of the whole structure, which is a response reconstruction method based on the least square variational principle proposed by Tessler et al. (Tessler and Spangler, 2004) of NASA Langley Research Center in 2002. Based on the known structural responses (such as displacement, strain, etc.), the structural parameters, full-field response and the unknown external loads causing these responses can be obtained by iFEM. Subsequently, many scholars have applied iFEM to the field of civil engineering structures, offshore engineering equipment, aerospace structures and biomedical engineering widely.
The study of iFEM on offshore structures is mainly done by Kefal’s team. Based on the research of Tessler, Kefal and Oterkus (Kefal and Oterkus, 2016) established a simple inverse four-node quadrilateral shell element (iQS4) in 2016, which realized the reconstruction of the displacement and stress of Panama container ship using the measured strain. Subsequently, in 2020, iQS4 was used to obtain von Mises distribution, which was used to estimate the damage under different conditions (Li et al., 2020b). In 2019, Kefal (Kefal, 2019) developed a novel eight-node curved inverse-shell element (iCS8) and corresponding iFEM formula, then the element was used to predicted the full-field deformation shape, global strain and stress distribution of cylindrical offshore structures accurately. In 2023, Zhu et al. (Zhu et al., 2024) combined optical fiber sensors with strain function-inverse finite element method (SF-iFEM) to establish the strain mapping function between the inner and outer surfaces of the hull stiffened plates, which was used to reconstruct the strain field accurately.
The inverse finite element method is efficient and real-time in solving problems where loads or stresses are inferred from displacement data. However, it has several limitations. First, the method’s accuracy depends on the quality and distribution of the measurement data. Insufficient measurement points or noisy data may lead to inaccurate results. Second, iFEM is highly sensitive to geometric modeling and boundary conditions, the systematic errors can be caused if the actual model does not match the theoretical one. Additionally, when dealing with strong nonlinearity, large deformations, or contact problems, the inverse problem may become ill-posed, leading to non-unique or unstable solutions. Overall, iFEM is suitable for situations where the structure is linear, with small deformations, sufficient measurement, and low noise. For complex structures and loads, it should be applied with more caution.
Kalman filter
KF is a recursive state estimation method that updates the optimal state estimation through the system model and measured response. Therefore, the response time history of the whole field of the offshore structure can be estimated using KF and the measured acceleration or strain or the combination of responses. The current trend is to use multi-type responses combined with simplified structural models to improve the accuracy and efficiency of response estimation.
Based on KF, Maes et al. (Maes et al., 2015, 2016) used limited measured data and structural models to obtain the strain time histories of 3 MW single-pile OWT in the North Sea of Belgium under different working conditions and locations. Tatsis et al. (Tatsis et al., 2021) decomposed the OWT system into substructures independent of the whole system, and recursively obtained solutions by fusing the reduced order model of the structural subdomain with the available response through Bayesian filter (BF). Terrazas et al. (Terrazas et al., 2022) used modal space formula and simplification model to reconstruct the dynamic response of the whole physical system through KF, and obtained the multi-axial stress time history to determine the critical plane of maximum fatigue damage accumulation, which was used to calculate the cumulative damage of the structure. Palanisamy et al. (Palanisamy et al., 2019) used the measured acceleration and strain to improve the estimation accuracy of the unmeasured strain in the low and high frequency domains respectively, and introduced buffering technology to realize the estimation of the strain of fixed submarine structures under non-stationary random input. Song et al. (Song et al., 2022) proposed a recursive Bayesian inference framework for the prediction of sparse output strain, the estimation of modeling parameters and unknown inputs of offshore platforms FINO3. In order to solve the problem of traditional argument Kalman filter (AKF) requiring offline selection of covariance matrix related to model uncertainty, Vettori et al. (Vettori et al., 2023) proposed an automated process noise covariance adaptation method to estimate the full-field strain of blade, the results showed that the response prediction accuracy is better than traditional AKF.
The KF method is widely used in structural response identification, but it also has some limitations. KF relies on an accurate system models and noise assumptions. If the model is inaccurate or the noise characteristics do not match, the identification accuracy may decrease. Additionally, KF is sensitive to initial conditions, inaccurate initial estimates can lead to significant deviations in the identification results. Furthermore, when dealing with large-scale systems, the computational burden can be heavy. Therefore, in the application process of KF, attention should be paid to the handling of factors such as noise environment, initial conditions, and computational efficiency.
Mode extension
ME technology can also solve the problem of limited information due to the limited measurement data. Accurate finite element models are fundamental to ME, which can be calibrated by modal assurance criteria (MAC). The response time history of the structure at different positions can be predicted based on the measured response and modal vector extracted from the calibrated FE model. ME method was proposed by Hjelm et al. (Hjelm et al., 2005) in 2005. Subsequently, based on the modal decomposition (MD) and ME method, Iliopoulos et al. (Iliopoulos et al., 2016) combined the limited measured acceleration set with the FE model to obtain the response of the unmeasured position, which was verified in OWT with different operating states. However, the acceleration sensor is not sufficient to reconstruct the low-frequency stress, the effect of noise is amplified by the double integral. In order to solve the problem, Henkel et al. (Henkel et al., 2020) added strain gauges to the sensor network, and predicted the stress of K-type and X-type joints of the jacket structure with the measured acceleration and strain through MD and ME, so as to evaluate the fatigue. In order to improve the accuracy of strain estimation, Skafte et al. (Skafte et al., 2017) divided the structural response into the low and high frequency. Then, the strain time histories of low frequency and high frequency were added to get the combined strain. In order to improve the quality of ME results, Augustyn et al. (Augustyn et al., 2021) proposed to deploy seabed sensors and wave radar sensors to extract local subsea brace modes and static wave modes respectively, which were included in the extended modes. Tarpo et al. (Tarpo et al., 2020) reduced modeling errors using numerical mode to extend experimental mode and converted the measured system response into full-field strain/stress using ME. Then, a method of estimating the stress/strain of the subsystem using a set of undamped and linear modal shapes was proposed and verified by numerical analysis and experiments of offshore platforms (Tarpo et al., 2021).
The ME method in structural response identification relies on accurate finite element models and measurement data. If the finite element model is inaccurate, the predictions may have significant errors. Additionally, estimating low-frequency stresses is challenging, as acceleration sensors cannot effectively reconstruct low-frequency stresses, and noise can affect the prediction accuracy. Furthermore, limitations in sensor placement and quantity may result in insufficient coverage of key areas, which in turn affects the accuracy of stress/strain predictions. While separating low-frequency and high-frequency responses helps improve accuracy, the process is complex and prone to inaccurate separation. Overall, the ME method currently faces issues related to model dependence, noise interference, and sensor limitations.
Machine learning methods
The machine learning-based methods have also been applied to the identification and prediction of the responses of offshore structures. Lee et al. (Lee et al., 2023) resampled SCADA data and acceleration data after low-pass filtering, and developed a bending strain prediction model of OWT tower bottom. Wang et al. (Wang et al., 2022c) built and trained a multi-layer perception model based on the coupling relationship between tower force and floating foundation motion response, and realized the identification of the tower top acceleration and tower root force. Then, in order to improve the response identification accuracy of the OWT, a sensor optimization method based on effective independence method (EIM) and MAC was proposed to extract more structural information, and identified the response combined with the above research (Wang et al., 2024b). Hu et al. (Hu et al., 2023) used the 6-DOF motion of the buoy as training data and the histories tension of the underwater hose as correction, the radial basis function (RBF) neural network and long short-term memory (LSTM) neural network model were used to predict the variation of submarine hose tension respectively. To mitigate the influence of environmental conditions on computer vision-based techniques for response measurements, Lei et al. (Lei et al., 2025) proposed an attention–long short-term memory network with partial strain measurements to enable real-time displacement estimation.
The application of machine learning methods in structural response identification has made significant progress, but it still has some limitations. Firstly, machine learning models often rely on a large amount of training data, these data may be difficult to obtain in some cases, which may lead to insufficient generalization ability of the model. Secondly, many machine learning models are sensitive to changes in environmental conditions, such as wind speed and ocean waves, which may adversely affect the accuracy of the model. Moreover, machine learning methods often require complex computing resources and long training times, which may pose challenges for real-time monitoring systems. Finally, although sensor optimization methods can improve the accuracy of response identification, in practical engineering, incomplete sensor placement and equipment failures may also affect the quality of data and the performance of the model.
Damage monitoring
Offshore structures are affected by the harsh marine environment during service, which inevitably causes corrosion, cracks and local structural strength attenuation. If the damage is not detected in time, it may lead to further deterioration of damage. Therefore, early detection of damage is of great significance for the integrity management of offshore structures. At present, the monitoring research of damage mainly includes the judgment of damage occurrence, damage location and damage degree determination and so on. Next, this section will introduce the current research progress from three different types of damage.
Corrosion
Corrosion is one of the main causes of failure of offshore structures. Currently, preliminary anti-corrosion measures have been taken for key components. However, experience shows that these measures cannot completely prevent long-term corrosion deterioration in highly corrosive marine environments. In fact, corrosion management still mainly relies on regular inspections and conservative assumptions, and there is still a significant gap between this and the long-term performance requirements of offshore structures. That is, the current system cannot provide reliable, continuous and quantifiable corrosion evolution information to meet these requirements.
Corrosion monitoring techniques for offshore structures mainly include ultrasonic (US) methods, dedicated corrosion sensors and structural-response-based identification methods. US techniques are generally sensitive to thickness loss and localized defects, but their performance may degrade in the presence of complex geometries, coatings, marine growth and environmental noise, and they often require sophisticated signal processing. Dedicated sensors (for example electrochemical or mechanical probes) can provide continuous local information such as corrosion rate, but their spatial coverage is limited and their long-term stability in harsh marine environments remains to be fully demonstrated. Structural-response-based methods, which infer corrosion from reconstructed strain or displacement fields, have the potential to capture more global effects but depend strongly on model fidelity and on the density and quality of the measurement network.
For corrosion localization, Kefal’s team (Ghasemzadeh et al., 2023) used the iQS4 element and both full-sensor and GA-optimized reduced-sensor iFEM schemes to reconstruct global strain fields and identify corrosion regions from deviations relative to the undamaged state. This approach converts sparse measurements into a pseudo full-field response and can reveal stiffness loss without direct access to the damaged area, but it requires accurate numerical models, appropriate sensor placement and careful treatment of operational and environmental variability; its robustness in real offshore conditions is still to be established.
Requirements of corrosion monitoring system proposed in (Thibbotuwa et al., 2022).

To capture corrosion rate and related parameters, Ahuir-Torres et al. (Ahuir-Torres et al., 2019) integrated non-destructive and passive electrochemical technologies into a sensor interface for autonomous real-time remote sensing of OWT corrosion. Alonso-Valdesueiro et al. (Alonso-Valdesueiro et al., 2022) proposed a highly sensitive submarine corrosion sensor using thin steel tubes as probes. These developments show the potential of combining electrochemical and mechanical concepts with remote sensing, but most prototypes have only been tested under simplified exposure conditions and over limited time spans. Their performance with respect to drift, fouling, mechanical robustness and calibration stability over the full service life is still insufficiently documented. Moreover, most current solutions adopt a single-physics, single-sensor perspective, whereas corrosion in offshore structures is strongly coupled with mechanical loading, temperature and hydrodynamic action.
In summary, corrosion monitoring for offshore structures is evolving from local, periodic inspections towards more continuous and system-level solutions. Nevertheless, important challenges remain in achieving multi-scale coverage (from local defects to global structural impact), ensuring long-term robustness in harsh environments, providing adequate redundancy at system level and establishing standardized procedures for data interpretation and decision support. Addressing these issues and better integrating heterogeneous data with probabilistic and data-driven models will be crucial for deploying corrosion monitoring within digital-twin-based integrity management schemes.
Crack
Cracks are another major form of damage in offshore structures, typically initiating at stress concentration zones under cyclic loading. Fatigue crack initiation and propagation have been identified as dominant failure mechanisms for many critical offshore details. However, most existing monitoring schemes still target cracks that have already grown to a detectable size, and robust strategies for detecting early-stage crack initiation under realistic marine loading and environmental conditions are still limited. In addition, the combined influence of corrosion, variable-amplitude loading and multiaxial stresses on crack evolution is not yet fully reflected in practical monitoring and assessment frameworks.
For crack detection, both acoustic-based and model-assisted experimental approaches have been studied. Focusing on acoustic detection at the rear edge of OWT blades, Zhang et al. (Zhang et al., 2020) numerically analysed aerodynamic acoustic noise for cracked and uncracked flange sections and compared the results with a semi-empirical model. Ali et al. (Ali et al., 2021) established a finite element model of a T-joint, identified high stress/strain regions and successfully detected fatigue damage by combining FEM with experiments. Acoustic techniques are non-contact and can potentially cover large areas, but are sensitive to background noise, aerodynamic conditions and sensor placement in real offshore environments. FEM-supported methods, in contrast, can accurately identify critical regions and provide clear physical interpretation, but are localized, model-dependent and more difficult to scale up to full structures.
Based on numerical simulations, Hlaing et al. (Hlaing et al., 2022) used heuristics and partially observable Markov decision processes (POMDPs) to analyse crack propagation and proposed several crack growth models and failure criteria for optimizing the management of OWTs under fatigue degradation. POMDPs explicitly represent uncertainties in crack growth and inspection and link monitoring to risk-informed decisions, but their models are generally calibrated from limited data and simplified assumptions, and the computational cost of solving them can hinder direct application to large-scale systems.
Adedipe et al. (Adedipe et al., 2015) performed experiments on fatigue crack growth in S355J2+N steel under corrosive conditions and proposed a crack length monitoring method combining back-face strain (BFS), alternating current potential difference (ACPD) and direct current potential difference (DCPD). This multi-sensor fusion improves robustness in corrosive environments, but remains essentially local and requires sensors near anticipated crack paths, presupposing accurate prior knowledge of critical locations; long-term stability and maintenance needs in harsh marine environments still require further study.
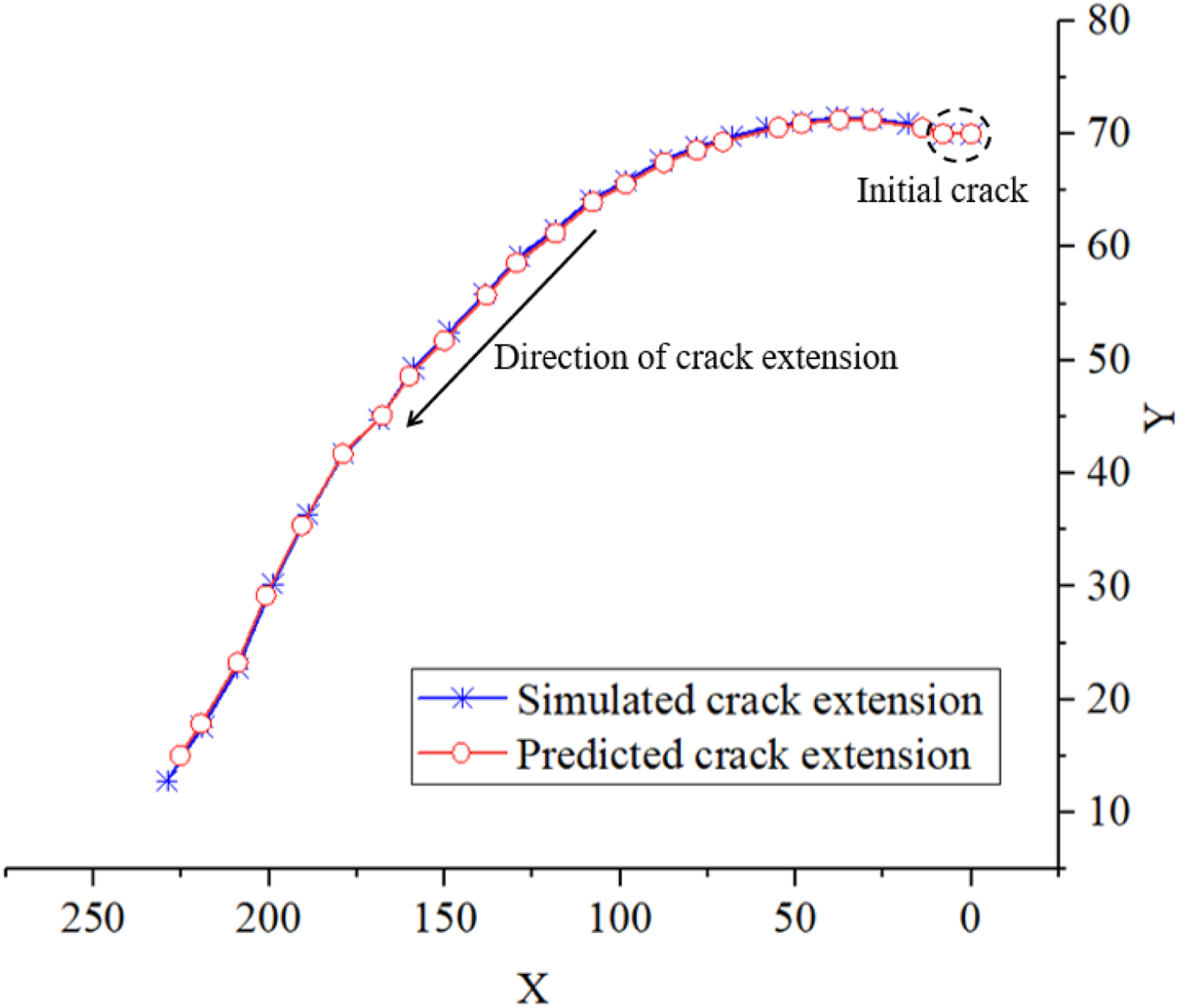
Data-driven approaches have been increasingly used to quantify crack characteristics. Yang et al. (Yang et al., 2020) proposed a multiple back-propagation neural network using a signal difference coefficient (SDC) as input to predict crack length and angle, while Qiu et al. (Qiu et al., 2020) developed a BP neural-network method improved by GRNN and GA to gradually determine crack location and severity in OWT structures. These neural-network-based methods demonstrate that data-driven models can capture complex nonlinear relationships between signals and crack parameters and reduce explicit reliance on detailed physical models, but their performance strongly depends on the representativeness of training data, which are often obtained under simplified laboratory conditions. Dai et al. (Dai et al., 2022) proposed a crack identification method using multidimensional strain data and support vector regression (SVR), showing good agreement between identified and actual crack lengths and growth paths (Figures 6 and 7). SVR is comparatively robust for small datasets, yet still requires careful feature selection and parameter tuning. Identification results of crack length. Identification results of crack growth path.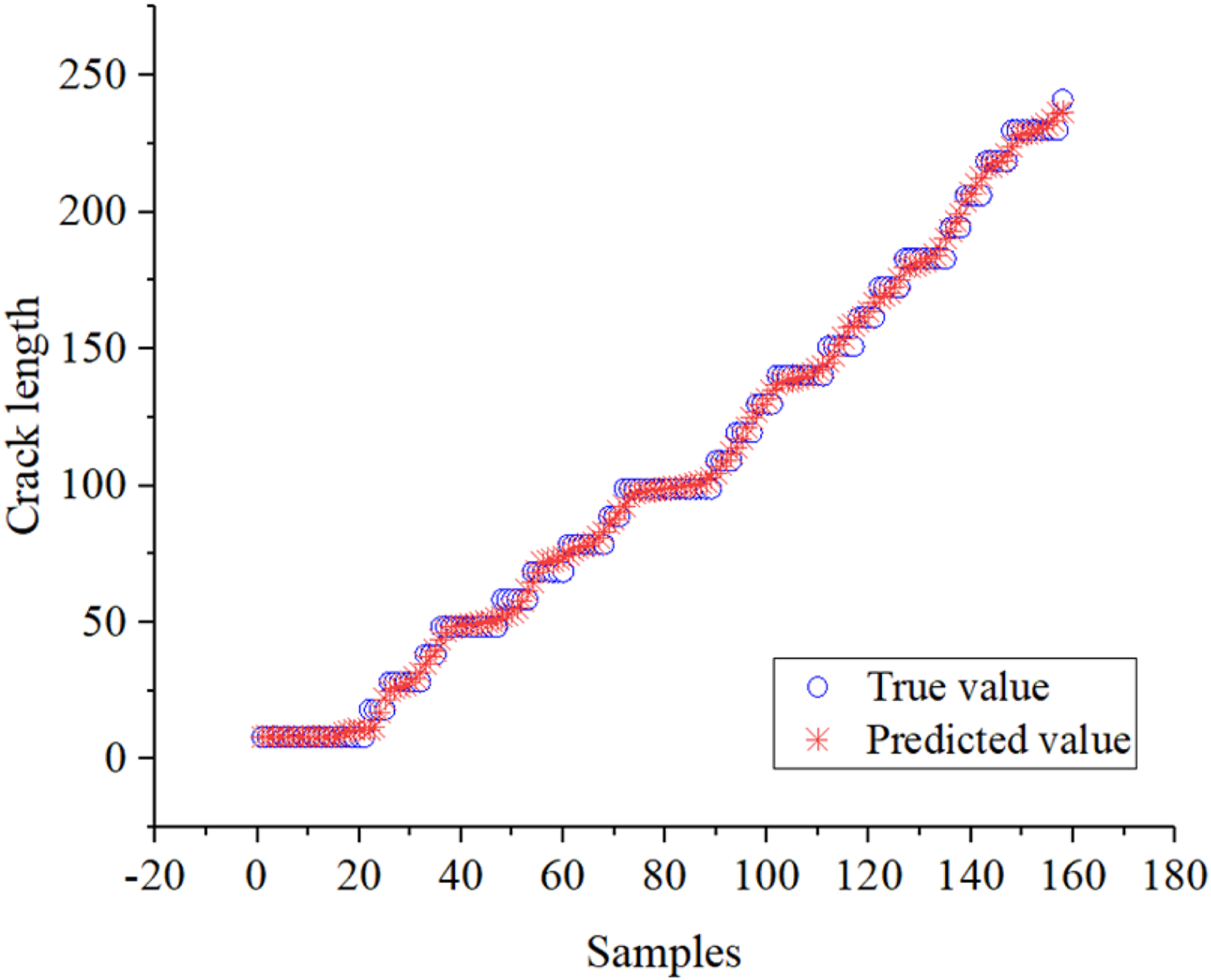
In summary, for crack growth monitoring, available approaches can be broadly grouped into three categories: (i) direct measurement techniques that infer crack size or growth rate from local sensors (e.g. strain or potential difference); (ii) model-based methods that use numerical or analytical models to interpret structural response and predict crack evolution; and (iii) data-driven and decision-oriented frameworks that employ machine learning or probabilistic models to link monitoring results with inspection and maintenance planning. Direct methods are typically sensitive but intrinsically local and require prior knowledge of critical locations; model-based methods offer clearer physical insight but depend on model fidelity and boundary-condition assumptions; data-driven and decision frameworks can treat complex dependencies and support life-cycle management, but rely on representative data and careful validation.
Taken together, these studies show a clear shift from simple crack/no-crack detection towards quantitative characterization of crack growth and its integration into integrity management. However, most methods are still validated at specimen or numerical model level, and long-term field demonstrations on full-scale offshore structures are scarce. There is also a lack of unified benchmark datasets and performance metrics for comparing different monitoring approaches in terms of detection threshold, false alarm rate, robustness to environmental and operational variability and cost-effectiveness. Filling these gaps will be essential for turning current crack monitoring techniques into mature, widely applicable tools for the life-cycle management of offshore structures.
Local damage of offshore structures
Most of the research on the damage monitoring of offshore structures has so far been carried out using numerical simulation or model-scale tests, in which local damage is artificially introduced by weakening cross-sections or reducing the stiffness of individual members. These studies have clearly shown that local stiffness reduction or cross-section weakening is an effective way to investigate the sensitivity of different damage identification methods in a controlled setting and to understand their basic capabilities. However, most existing work is still confined to such predefined damage scenarios, robust strategies for detecting and quantifying local damage in full-scale offshore structures, under strong environmental and operational variability, are still not sufficiently established.
A considerable number of contributions fall into the category of model/response-based methods, which exploit changes in modal parameters or frequency response functions (FRFs), often combined with model updating. Shokrgozar et al. (Shokrgozar et al., 2022) employed signal energy decomposition techniques to localize damage by extracting features from the casing structure in both intact and damaged states. Sakaris et al. (Sakaris et al., 2021) simulated damage by reducing the stiffness of the connection points between the tendons and the storage tanks on the upper part of a platform, and proposed to use a single response signal and a random functional model to represent the dynamic characteristics of the structure in different states, thus achieving damage detection, localization and quantification. Zargarzadeh et al. (Zargarzadeh et al., 2020) proposed a new iterative cross-model cross-mode (CMCM) algorithm based on changes in the modal parameters of a platform steel frame to identify and locate damage. Similarly, Zhang et al. (Zhang et al., 2022b) identified damaged regions by comparing the modal characteristics of the structure in undamaged and damaged conditions, and thereby determined both the location and severity of the damage. Fathi et al. (Fathi et al., 2020) proposed a Bayesian model updating and damage detection framework based on incomplete FRF data; by incorporating FRFs at different excitation frequencies, the amount of information in the objective function was increased to alleviate the incomplete measurement problem, and the method was applied to damage identification in offshore structures, with its performance verified using simulated damage via local component stiffness reduction.
Overall, these approaches share the common feature of inferring local damage from global structural responses. Their main advantage lies in the fact that they can work with spatially sparse or incomplete measurements, and they offer an interpretable link between damage and changes in modal or FRF characteristics. However, their performance is highly dependent on the fidelity of the underlying numerical model, the quality of the identified modal parameters and FRFs, and the treatment of measurement noise and environmental effects. In addition, most case studies consider relatively simple damage patterns (e.g., single-location or severe stiffness reduction) and do not fully address multiple simultaneous damage locations or strong parameter uncertainties, which may limit their direct applicability to complex, full-scale offshore systems.
More recently, intelligent and data-driven methods have been introduced for local damage identification. Guo et al. (Guo et al., 2018) proposed a damage identification index that combines sixth-order modal identification results and natural frequency information, and then trained a neural network model for component damage prediction using the damage index and damage degree obtained from finite element simulations. Kuai et al. (Kuai et al., 2024) simulated damage by reducing element stiffness and employed two machine-learning regression models—support vector machine (SVM) and relevance vector machine (RVM)—to define cointegration relationships; damage in fixed steel platforms was then identified by combining anomaly detection with frequency-domain decomposition. To overcome the limitation of conventional artificial neural networks in capturing the temporal correlation between features and damage patterns, Wang et al. (Wang et al., 2024a) proposed an integrated deep learning method in which a squeeze-and-excitation network (SENet) attention mechanism is used to select the most informative features, and a bidirectional long-short term memory (BiLSTM) network is employed to learn the mapping between the extracted features and structural damage patterns. Numerical simulations and experiments on offshore jacket structures were carried out to validate the proposed method.
In summary, these machine learning methods mark a clear shift from purely model-based localized damage identification toward data-driven approaches that leverage high-dimensional response data and capture complex nonlinear relationships. Compared to classical modal analysis and frequency response function methods, they offer greater flexibility in handling diverse features and patterns. However, these approaches often face challenges such as the aforementioned issues with generalization across different operating conditions and the availability of benchmark datasets. Addressing these challenges is crucial for transforming existing localized damage monitoring technologies into mature, widely applicable tools for the full-lifecycle integrity management of offshore structures.
Conclusions and suggestions
Offshore structures are key assets for the development and transmission of marine resources. At present, quite numbers of structures are already approaching or exceeding their original design life. Without continuous condition assessment and timely maintenance, local or global strength degradation may accumulate and eventually lead to failure with severe safety and economic consequences. Against this background, this paper has reviewed recent advances in SHM for offshore engineering structures, with emphasis on marine environmental load monitoring, dynamic response analysis and damage monitoring. On this basis, some conclusions and suggested future research directions can be drawn.
Conclusion
(1) From the perspective of marine environmental loads, existing work on wind, wave and ice monitoring has significantly improved the understanding of offshore load spectra and extreme events. Field measurements, CFD simulations and intelligent data-driven models have been widely used. However, most studies still treat wind, wave and current as separate loads, and full-scale multi-field coupled monitoring and identification remain limited. In addition, Reynolds number effects in wind and CFD studies, the generalization ability of intelligent wave models under extreme conditions, and the robustness of ice-load monitoring under poor visibility are not fully resolved. (2) In terms of dynamic response monitoring, recent research has covered modal identification under natural and extreme excitation, motion-state estimation based on structural dynamics, numerical simulations and physical model tests, as well as direct and virtual sensing-based strain/stress identification. Advanced SSI variants, noise-robust modal identification methods, iFEM, KF-based virtual sensing and modal expansion techniques have been applied to offshore structures. Nevertheless, key challenges remain in dealing with time-varying environmental excitation, data quality issues in long-term monitoring, and the dependence of response reconstruction accuracy on finite element model fidelity and sensor placement. (3) For damage monitoring, corrosion, fatigue cracks and local stiffness reduction have been studied using ultrasonic and electrochemical sensors, virtual sensing, model updating, FRF-based methods and machine learning methods. The review shows a clear trend from qualitative damage detection towards quantitative characterization of corrosion and crack growth and towards system-level integrity management. However, most methods are still verified on numerical models, specimens or scaled models, while long-term, full-scale field demonstrations under realistic operational and environmental variability are scarce. In addition, there is a lack of unified benchmark datasets and performance metrics for comparing different SHM techniques.
Suggestion for future research and applications
Based on the above findings and the author’s understanding, the following suggestions are proposed for future research and engineering application of SHM in offshore structures. (1) Develop multi-source, coupled load monitoring for wind–wave–ice environments. Future work should move from single load monitoring towards integrated monitoring of coupled environmental fields. For offshore engineering structures, this implies combining field measurements, CFD/CFD–FE coupled models and intelligent algorithms to jointly identify wind, wave and ice loads. Particular attention should be paid to (i) validating CFD and data-driven models against full-scale measurements at realistic Reynolds numbers, and (ii) constructing load descriptors that can be directly used as covariates in response/damage-based SHM indicators. (2) Design sensor systems suitable for marine environments to ensure reliable performance under harsh conditions. As shown by the discussion on strain/stress and corrosion monitoring, both direct measurement and ultrasonic/electrochemical techniques are constrained by durability, power supply and maintenance in the marine environment. Future sensor development should not only consider corrosion resistance, waterproofing and high sensitivity, but also explicitly quantify long-term stability, drift characteristics and failure modes under high pressure, strong currents and biofouling. FBG sensors, strain rosettes, corrosion probes and ultrasonic devices should be evaluated in terms of their life-cycle performance and integrated into standardized test protocols tailored to offshore conditions. (3) Integrate physics-based and data-driven methods for motion and virtual sensing. The review of virtual sensing techniques and intelligent algorithms for motion/response estimation indicates that purely physics-based or purely data-driven approaches each have limitations. A promising direction is to develop physics-informed machine learning frameworks that embed structural dynamics, FE models and modal information into neural networks or other learning models. In practice, this requires: (i) systematic FE model updating using measured modal parameters; (ii) optimized sensor placement strategies for virtual sensing; and (iii) explicit uncertainty quantification for reconstructed displacement, strain and stress histories, so that they can be reliably used for fatigue assessment and damage prognosis. (4) Develop multi-scale, multi-physics and decision-oriented damage monitoring frameworks. Future work on corrosion, fatigue cracks and local stiffness loss should combine ultrasonic/electrochemical sensing and structural-response-based methods to obtain both local damage sensitivity and global structural features. Early crack initiation and growth under combined corrosion, variable-amplitude loading and multiaxial stress need to be investigated using multi-physics and probabilistic models that explicitly account for environmental and operational variability. In parallel, representative benchmark problems and open datasets for typical offshore structures should be established to compare model-based and data-driven damage identification methods in terms of detection performance, robustness and computational cost, and to support risk-based inspection and maintenance planning. (5) Strengthen field validation, robotic inspection and digital-twin-based SHM. A recurring limitation across the reviewed studies is the gap between numerical/model-scale work and real offshore applications. To bridge this gap, more long-term SHM campaigns on full-scale structures should be designed, in which sensor networks (including underwater instruments), virtual sensing methods and damage identification algorithms are jointly validated. Unmanned aerial vehicles, remotely operated vehicles and autonomous underwater vehicles equipped with multi-type sensors should be used to access submerged and hard-to-reach areas and to provide ground truth for virtual sensing and model-based methods. In parallel, digital twin frameworks for offshore structures should be established, where real-time SHM data, updated numerical models and degradation models interact to support operational decision-making, life extension assessment and optimal maintenance scheduling.
In summary, the future development of SHM for offshore engineering structures should focus on: (i) coupled and multi-scale monitoring of environmental loads and structural responses; (ii) offshore-specific sensor and virtual sensing system design with quantified long-term performance; (iii) integration of physics-based models, intelligent algorithms and probabilistic decision tools; and (iv) large-scale field validation and digital-twin-based integrity management. These directions are expected to promote the transition of SHM for offshore structures from concept demonstration to robust, widely adopted industrial practice.
Footnotes
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This study was supported by the Fundamental Research Funds for the Central Universities (Grant No. 2024MS130).
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.