
Abstract
Traffic loads are the main source of live loads on bridge structures, and accurately identifying the dynamic axle load of vehicles is of great importance for Bridge Structural Health Monitoring (BSHM). Most of the past research established the relationship between moving forces and structures through analytical or finite element methods to estimate axle loads, which was proved to be ill-conditioned and inefficient. In this paper, a Moving Force Identification (MFI) method based on U-shaped Network (U-Net) is proposed, which does not require axle position information as a prior knowledge, but is completely based on monitoring data. Firstly, the dynamic response of the finite element model under traffic load is used to establish a data set. In this process, a large number of random traffic flows with different axle loads, axle spacings and vehicle speeds are generated to simulate the operation process of real bridges. Then, the deep learning model is trained with dynamic displacement data as input and dynamic axial load as output. The accuracy of the model is verified by numerical simulation and the robustness of the model is tested. Finally, the practicality of the proposed method is tested by the actual bridge experiment. The results of the actual bridge test show that the mean error of the axle force identification of the proposed method is 6.28 %, indicating that the proposed method has certain application prospects in practical engineering.
Keywords
Introduction
As a critical component of road infrastructure, bridges play an essential role in transportation networks, and their safety depends on both structural performance and external loads. Among these, traffic loads constitute the primary live load during bridge operation. Accurate identification of vehicle–bridge interaction forces is therefore of great importance for bridge design, assessment, and maintenance.
Various methods have been developed to monitor traffic loads on bridges, which can be broadly classified into direct and indirect approaches. Direct measurement methods, commonly referred to as Weigh-in-Motion (WIM) systems (Richardson and Jones, 2014), employ sensors embedded in the road surface to measure tire-induced dynamic pressures, enabling the estimation of axle loads, axle counts, and vehicle speeds (Sujon and Dai, 2021). Although WIM systems can operate without interrupting traffic, they typically suffer from short service life and high installation and maintenance costs. Their installation often requires lane closures and may cause damage to the bridge deck (Yu et al., 2016). Moreover, since traffic loads vary in both time and space, WIM systems cannot directly capture the time-history distribution of vehicle loads acting on the entire bridge (Burnos and Gajda, 2016). Consequently, indirect measurement techniques, which are more cost-effective and less intrusive, have attracted increasing research attention.
Indirect measurement techniques, commonly referred to as Moving Force Identification (MFI), model traffic loads as moving forces acting on the bridge. By exploiting measured structural responses and the relationship between these responses and vehicle loads, MFI enables the back-calculation of axle loads and total vehicle weight, yielding the time history of the moving force. As an important research topic in Structural Health Monitoring (SHM), MFI has been extensively investigated over the past decades (Yi et al., 2017). Based on different calculation methods, MFI algorithms can be divided into analytical methods (Zuo et al., 2019) and finite element methods (Hao et al., 2019). Analytical methods require a mathematical model to obtain the dynamic response of the bridge and solve an optimization problem where the contact force is the variable of the objective function. This optimization minimizes the difference between the analytical response and the sensor measurements. Analytical methods include the time domain method (Law et al., 1997), time-frequency domain method (Yu and Chan, 2003), interpretation method (Chan et al., 1999), state-space method (Zhu et al., 2006), moment method (Yu et al., 2008), and influence line method (Jian et al., 2019; Wang et al., 2025).
Finite element methods, on the other hand, establish a finite element model of the bridge to derive the relationship between the moving force and a particular component. Since the MFI problem is a typical inverse problem, its solution is highly sensitive to noise, road roughness and initial conditions, and it may encounter significant errors when the moving forces are near the structural boundaries (Cao, 2025; Pan et al., 2017). To mitigate these issues, regularization methods are often incorporated into the MFI solution process (Jian et al., 2022). Common regularization methods include Tikhonov regularization (Zhu and Law, 2002), basis function expansion method (Qiao et al., 2015), sparse regularization method (Pan et al., 2018), Bayesian inference regularization (Feng et al., 2015), truncated singular value decomposition (Chen and Chan, 2017) and so on. For instance, Tang et al. (Tang et al., 2022) introduced a load identification method based on the transmissibility of power spectral density and adaptive multiplicative regularization. Their approach can localize random loads without prior knowledge of the excitation position and significantly reduces the iteration cost. Despite these advances, the iterative solution of dynamic equilibrium equations still imposes a considerable computational cost, making it difficult to achieve real-time performance. Moreover, most existing MFI methods require additional measurements, such as vehicle speed, axle spacing, and axle number, obtained from camera systems or auxiliary sensors (Jian et al., 2024; Wang and Li, 2025; Zhang et al., 2021), which further complicates practical implementation.
In recent years, advances in computational power and artificial intelligence have motivated the application of deep learning techniques to moving force identification. Owing to their strong nonlinear modeling capability, neural networks can learn the complex mapping between structural responses and vehicle loads, thereby avoiding the explicit solution of time-consuming inverse problems. (Kim et al., 2009) employed artificial neural networks to identify vehicle weight, speed, and axle information from strain measurements, demonstrating accuracy comparable to traditional influence-line methods on a cable-stayed bridge. (Chang et al., 2025) proposed a low-complexity real-time detection Transformer (LC-RTDETR) that improves vehicle localization accuracy under dynamic scenes while reducing computational cost. (Kawakatsu et al., 2019) used deep neural networks with a single strain sensor to estimate vehicle speed, trajectory, and wheel position, aided by temporary camera-based calibration. (Zeng et al., 2024) proposed a Moving Force Neural Identifier incorporating a dynamic moving force correction block to estimate dynamic axle loads without explicit vehicle speed or axle information. However, this approach considers only a limited set of predefined vehicle configurations, and its applicability to real bridge scenarios requires further validation.
In summary, although MFI techniques have achieved significant progress, they still face challenges such as sensitivity to noise, high computational cost, and reliance on additional information including vehicle speed, axle spacing, and axle count. Developing MFI methods that satisfy real-time requirements while relying solely on structural response data remains a major challenge. Deep learning–based MFI approaches offer the potential to implicitly extract axle-related information from monitoring data, thereby eliminating the need for dedicated axle detection equipment. However, existing studies are still at an early stage, with most investigations limited to numerical simulations or laboratory-scale experiments, and often focused on static or quasi-static axle load estimation. Consequently, there is a strong demand for efficient methods capable of accurately identifying dynamic axle loads. Motivated by these challenges, this study proposes a U-Net–based vehicle dynamic load identification method that fully exploits structural response data. The proposed approach enables accurate estimation of dynamic axle loads without requiring prior information such as axle count or axle spacing.
This paper is organized as follows: Section 2 introduces the framework of MFI and the simplified vehicle-bridge interaction system. Section 3 presents the results of numerical simulation verification and model robustness analysis. Section 4 evaluates the feasibility of the proposed method for engineering applications through vehicle testing on a real bridge. Finally, the conclusion is given in Section 5.
Nomenclature of main variables used in the paper.

Methodology
Figure 1 illustrates the proposed moving force identification framework. First, a finite element model of the bridge is established based on design documents and calibrated using field monitoring data. The updated model is then used to generate simulation datasets for training the U-Net. Finally, the trained network is applied to displacement measurements from the real bridge to identify the time-history of vehicle loads. Framework of the proposed MFI method.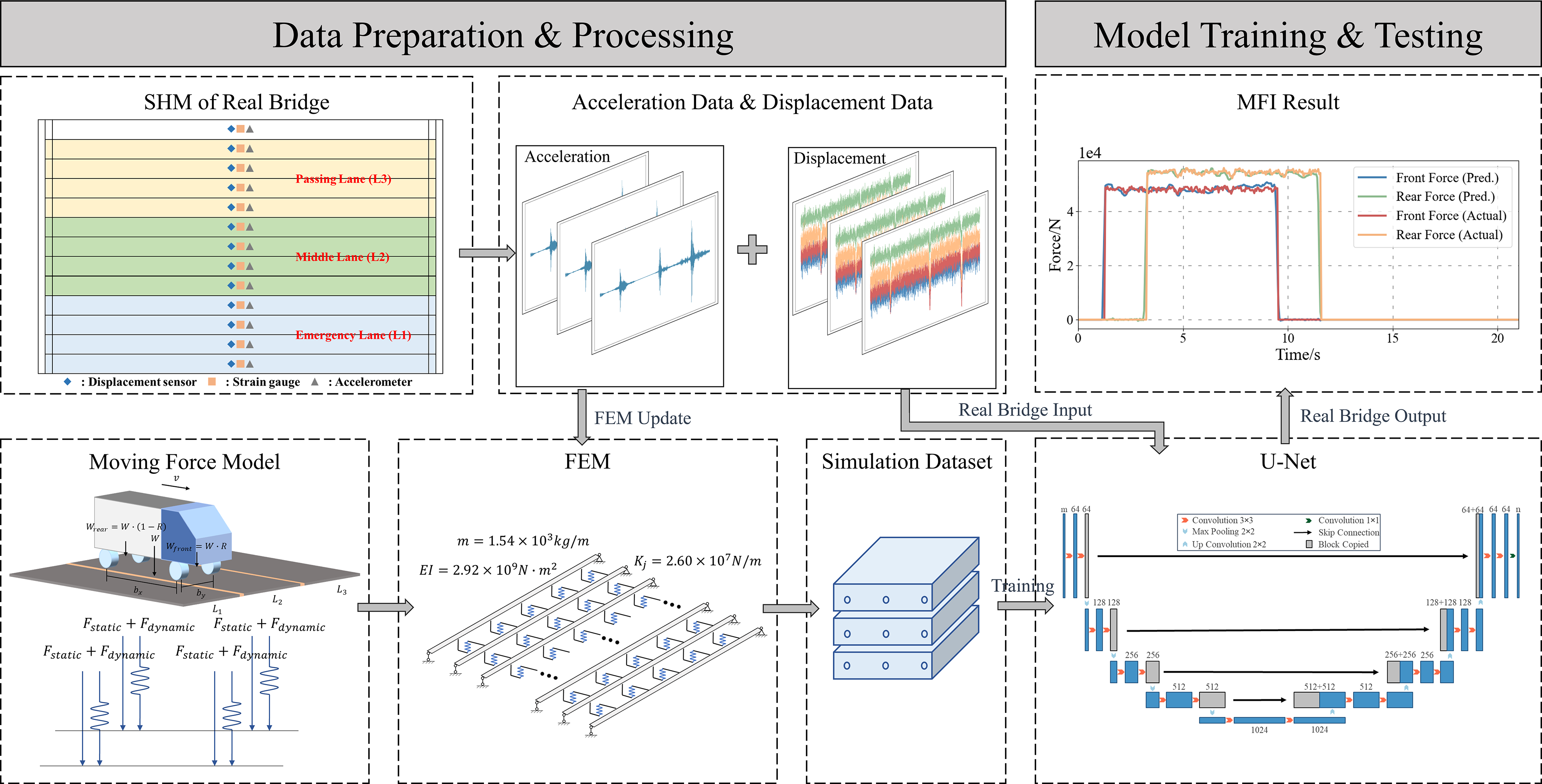
U-shaped network
The purpose of this study is to identify the time-history of moving vehicle forces, which include both global static components and localized dynamic fluctuations. Therefore, a model is required that can capture global trends while preserving fine-scale temporal variations. U-Net is well suited for this task due to its ability to combine deep semantic features with shallow structural information.
U-Net is a convolution-based encoder–decoder architecture widely used in computer vision and time-series mapping tasks. Its characteristic “U” shape consists of a contracting path for feature extraction and an expansive path for resolution recovery. The encoder progressively reduces the feature-map size while increasing channel depth, enabling the extraction of high-level representations and suppression of noise. The decoder restores temporal resolution through up-sampling while incorporating detailed features from earlier layers via skip connections (Fan et al., 2021).
The U-Net structure used in this paper is illustrated in Figure 2. The encoder contains four down-sampling stages, each composed of two 3 × 3 convolutions followed by a 2 × 2 max-pooling layer. The number of channels increases with depth as 64 → 128 → 256 → 512 → 1024. The decoder mirrors this structure, using 2 × 2 transposed convolutions for up-sampling. After each up-sampling step, the corresponding encoder features are concatenated through skip connections, followed by two 3 × 3 convolutions that refine the fused representation. A final 1 × 1 convolution maps the decoded features to the output channel(s). All convolution layers use ReLU activation. This configuration ensures that the network can simultaneously learn long-range temporal dependencies and localized dynamic features, making it suitable for mapping bridge displacement signals to axle-force time histories. U-Net structure used in this study.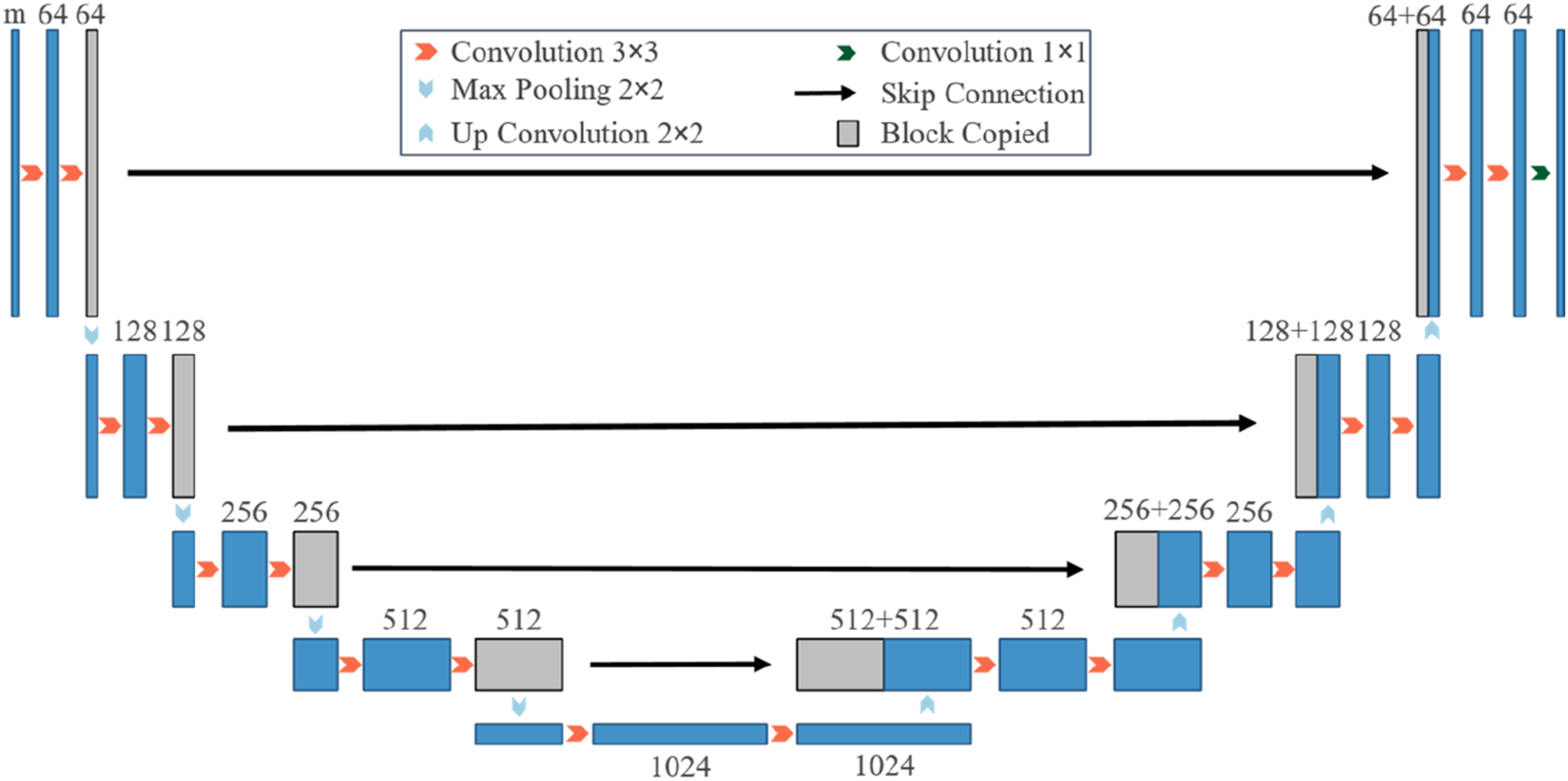
Simulation dataset generation
The training of deep learning models requires large datasets, and it is not realistic to obtain moving force identification samples from real data, so this study generates training datasets through finite element model simulation.
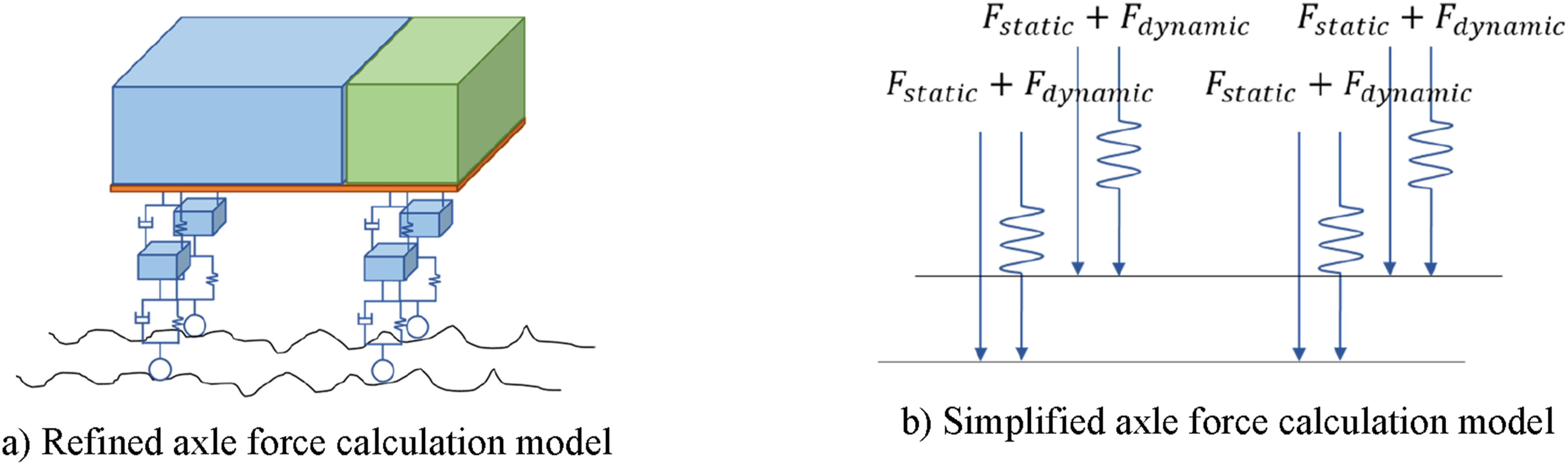
As illustrated in Figure 3, to simplify the interaction between the vehicle and the bridge while closely approximating real-world conditions, this study simulates the moving force load applied to the bridge during vehicle travel by adding random noise to a constant axle load, as expressed in equation (1): Refined axle force calculation model and Simplified axle force calculation model.

In order to simulate the various vehicle loads that the bridge may be subjected to during operation, this study considers random traffic flow under different combinations of axle load, axle spacing, vehicle width and vehicle speed, and simulates the travel of these vehicles on different lanes. For simplification, all vehicles are modeled as two-axle vehicles. The Newmark method is used to calculate the response of the bridge under random traffic flow with a time step of 0.02 s. The vertical displacement at the mid-span location of the bridge is extracted to generate the dataset.
Model training and evaluation strategy
The design of effective model training and evaluation strategies is essential to ensure the performance and generalization capability of the proposed moving vehicle load identification model. This section describes the input–output configuration, data preprocessing, and training strategy of the U-Net.
The input and output settings of the U-Net are defined as follows: 1) Input: The network input consists exclusively of structural response data, namely the mid-span vertical displacement time histories of 13 girders, resulting in 13 input channels. Each channel corresponds to one girder. For the simulation dataset, each input sequence is extracted from a time window that starts 10–40 time steps before the vehicle-induced response becomes dominant, ensuring consistent sample alignment during training. The input length is fixed at 448 samples with a uniform time interval of 0.02 s, which satisfies the architectural requirements of the U-Net and fully covers the vehicle–bridge interaction process. 2) Output: Two output configurations are considered: A single channel representing the total axle force; Two channels representing the front and rear axle forces.
The output length is 448 samples for both configurations. Although vehicle loads are generated using four-wheel forces in the numerical simulations for higher fidelity, it is common practice in moving force identification to simplify them into front and rear axle forces, or a single total axle force, to reduce problem complexity while meeting engineering requirements.
To mitigate the influence of scale differences and ensure stable training, both input displacement data and output force data are normalized to an appropriate numerical range.
It should be emphasized that the proposed method does not require axle position, axle spacing, or axle configuration after the vehicle enters the bridge. Unlike conventional MFI approaches that rely on external detection systems to obtain real-time axle information, the proposed method only needs an input window that includes the transition from ambient vibration to vehicle-induced response. In practical deployment, this window can be initiated using a simple threshold-based trigger that detects when the bridge response exceeds the background vibration level, without knowing the exact axle-entry time. The reference timing used in the simulation is solely for generating uniformly aligned training samples and is not required in real applications.
To mitigate the impact of differences in data magnitude on the training process, all data are normalized to align their scales.
The Adam optimizer is used during training, with an initial learning rate of 0.001. Adaptive learning rate scheduling is applied, reducing the learning rate by half if the validation set performance does not significantly improve over eight consecutive epochs. This strategy enhances training efficiency, stability, and final model performance. The optimization objective is the mean square error (MSE), which is defined as equation (3).
The dataset is randomly divided into training set, validation set, and test set in the ratio of 7:2:1. The samples in the training set were used to train the U-Net after disrupting the order. During the training process, after traversing all the training samples each time and completing one round of iterations, the validation set is input into the network. The generalizability of the network is evaluated by calculating the loss on the validation set, and an early stopping mechanism is employed to prevent the model from overfitting.
Numerical analysis
Bridge modeling
In order to verify the feasibility of the proposed moving force identification method, a finite element model is developed for numerical simulation and analysis in this study. The structural form of the finite element model is a simply supported girder bridge, which consists of 13 girders, each with a length of 20 m, Finite element model and schematic illustration of random traffic flow vehicle parameters.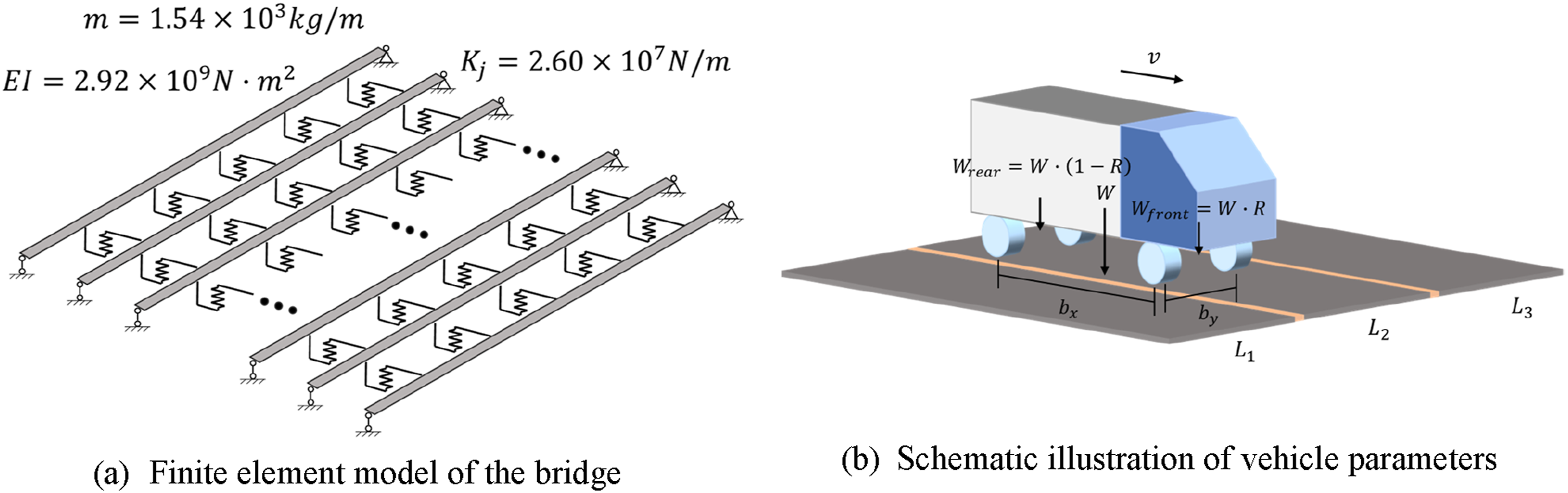
Ranges of parameters used for generating random traffic flow.

The actual bridge is always subject to random environmental excitation and traffic excitation, so in order to simulate the initial vibration state of the vehicles before they enter the bridge, each vehicle is first allowed to drive over the bridge with an excitation vehicle before going on the bridge, and the target vehicle passes over the bridge after the excitation vehicle has exited. The excitation vehicle’s passage is set at time 0 seconds, while the target vehicle’s passage occurs at 6.5 seconds. The wheel force time curve and the response time curve recorded in a case study are shown in Figure 5. Wheel force and response time history curve.
U-Net training and evaluation
The displacement responses and corresponding moving force time histories during each simulated vehicle passage are extracted to construct the dataset for training the U-Net. The model is trained for 100 epochs, and the loss curves for the two output configurations are shown in Figure 6. The training loss converges to a low level, indicating effective model fitting. Although the validation loss exhibits noticeable fluctuations during the early training stage, it gradually stabilizes and approaches the training loss after approximately 50 epochs, suggesting satisfactory generalization performance. To ensure optimal generalization, the model corresponding to the minimum validation loss is selected for subsequent analysis. Loss curves during training under different output conditions.
All model training was performed offline using the PyTorch framework on a workstation equipped with a single NVIDIA RTX 4070 Ti Super GPU. For the numerical simulation dataset consisting of approximately 27,000 samples, the U-Net model converged in about 100 training epochs with a batch size of 64, requiring approximately 114 minutes of training time. After training, the trained model is applied to new displacement response data in a feed-forward manner, and the inference time required to process a single vehicle passage is on the order of milliseconds, indicating that near real-time application is feasible.
Numerical simulation results
The model after training is used to test 2700 samples in the test set, and the Relative Percentage Error (RPE) RPE index is used to evaluate the accuracy of the axle force. The formula for calculating the RPE index is as follows:
Performance of the model on the test set.


Identification results under different output conditions.
Sensitivity analysis
Influenced by environmental factors, monitoring data often contain varying levels of noise. Consequently, it is crucial to assess the model’s robustness to noise interference. Without altering the training and validation sets, this study introduces varying levels of noise into the inputs of the test set to evaluate the model’s sensitivity to noise.
Performance of the model under different measurement noise levels.

Performance of the model under different sensor availability conditions.

The results show that the identification accuracy decreases only slightly when up to four sensors are removed, with the mean RPE increasing by less than 0.13 percentage points. This indicates that the proposed method is not highly sensitive to partial sensor loss and remains effective as long as a minimum number of displacement channels are available.
Real-world bridge verification
Bridge description
This study validates the applicability of the proposed method through a full-scale vehicle experiment on a real bridge. Figure 8 shows the side view and cross-sectional design of the test bridge. The bridge is an eight-span simply supported girder bridge, and the first span is selected as the test section. It consists of 13 precast hollow slab beams, each 20 m long, with a width of 1.0 m and a height of 0.85 m. The total bridge width is 13.5 m, accommodating three traffic lanes (passing lane, middle lane, and emergency lane). Photoelectric deflectometer targets are installed at the mid-span of each beam to measure displacement, with a sampling frequency of 33 Hz. In addition, accelerometers and strain gauges are installed at the mid-span locations. Overview of the test bridge and sensor deployment.
Vehicle experiment and data analysis
Experimental design
The vehicles used in the field experiment include three different trucks: Truck A (two axles), Truck B (three axles), and Truck C (four axles). Their vehicle profiles and axle spacings are shown in Figure 9. For Trucks B and C, the spacing between the first two axles and between the last two axles is relatively small. As discussed in Section 2.3, accurately identifying the dynamic load of each individual axle is generally challenging. To simplify the identification task, the first two axles and the last two axles are each treated as a single equivalent force, whose magnitude is taken as the sum of the corresponding axle loads and whose position is defined as the midpoint between the axles. The front axle load, rear axle load, and total axle load were measured separately, and the corresponding data are summarized in Table 6. Trucks used in the experiment. Properties of the truck.

The experiment consisted of 12 rounds of truck tests, involving different types of trucks traveling at varying speeds on different lanes. The design of the truck experiment is shown in the Figure 10. Design of truck test schemes for each round.
Monitoring data analysis
The bridge is instrumented with photoelectric deflection gauges to measure mid-span displacement. The gauges have a measurement range of 0–600 mm and a sampling interval of 0.03 s. The measurement accuracy is ± 0.1 mm within 30 m and ±0.2 mm within 50 m. The displacement responses recorded during the truck tests are shown in Figure 11. As can be observed, the raw displacement data contain considerable noise and exhibit baseline drift, resulting in noticeable deviations from the numerical simulation results. Raw displacement data from the truck test.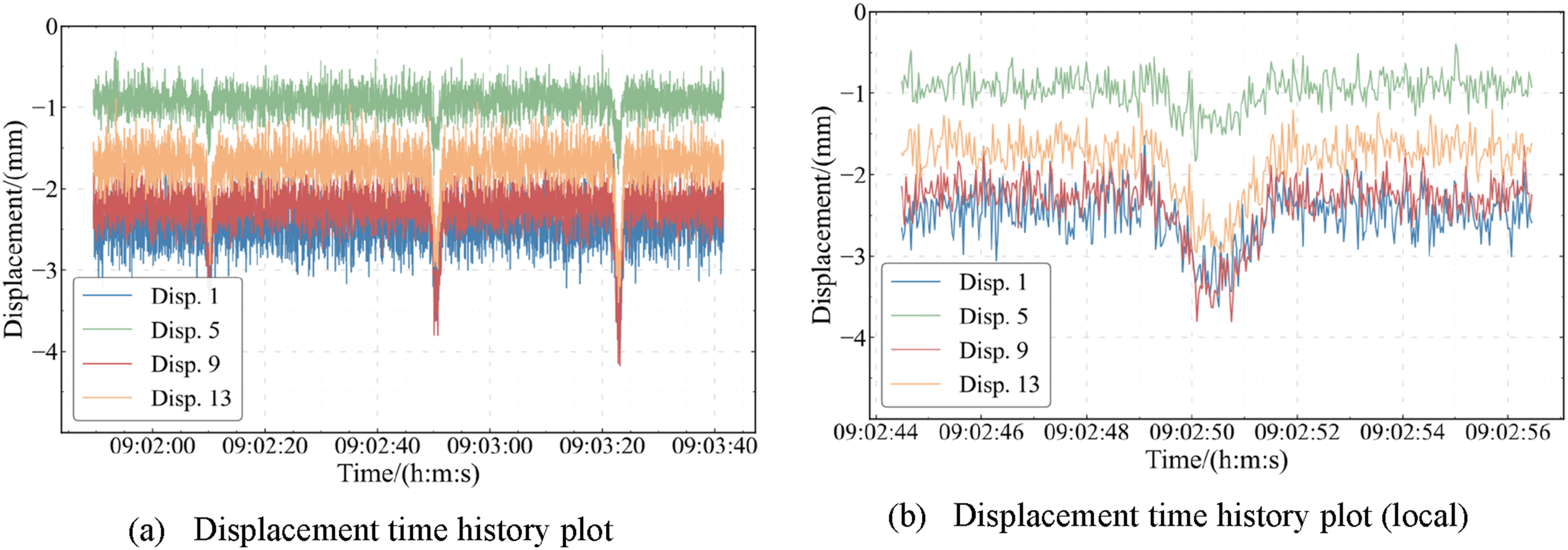
The bridge is also instrumented with accelerometers installed at the mid-span of each beam. The accelerometers operate at a sampling frequency of 50 Hz, with a measurement range of ±20 The natural frequency and mode of the bridge.
MFI of real bridge
Establishment and update of FEM
Based on the design documents of the bridge, the finite element model of the bridge is established. The specific parameters of the finite element are as follows: the modulus of elasticity of the beam 
In the optimization process, the stiffness of each hinge is assumed to be the same, as all the hinges are designed with identical parameters and materials. The grid search method is employed to find the optimal hinge stiffness within a specified range, with the search range set to
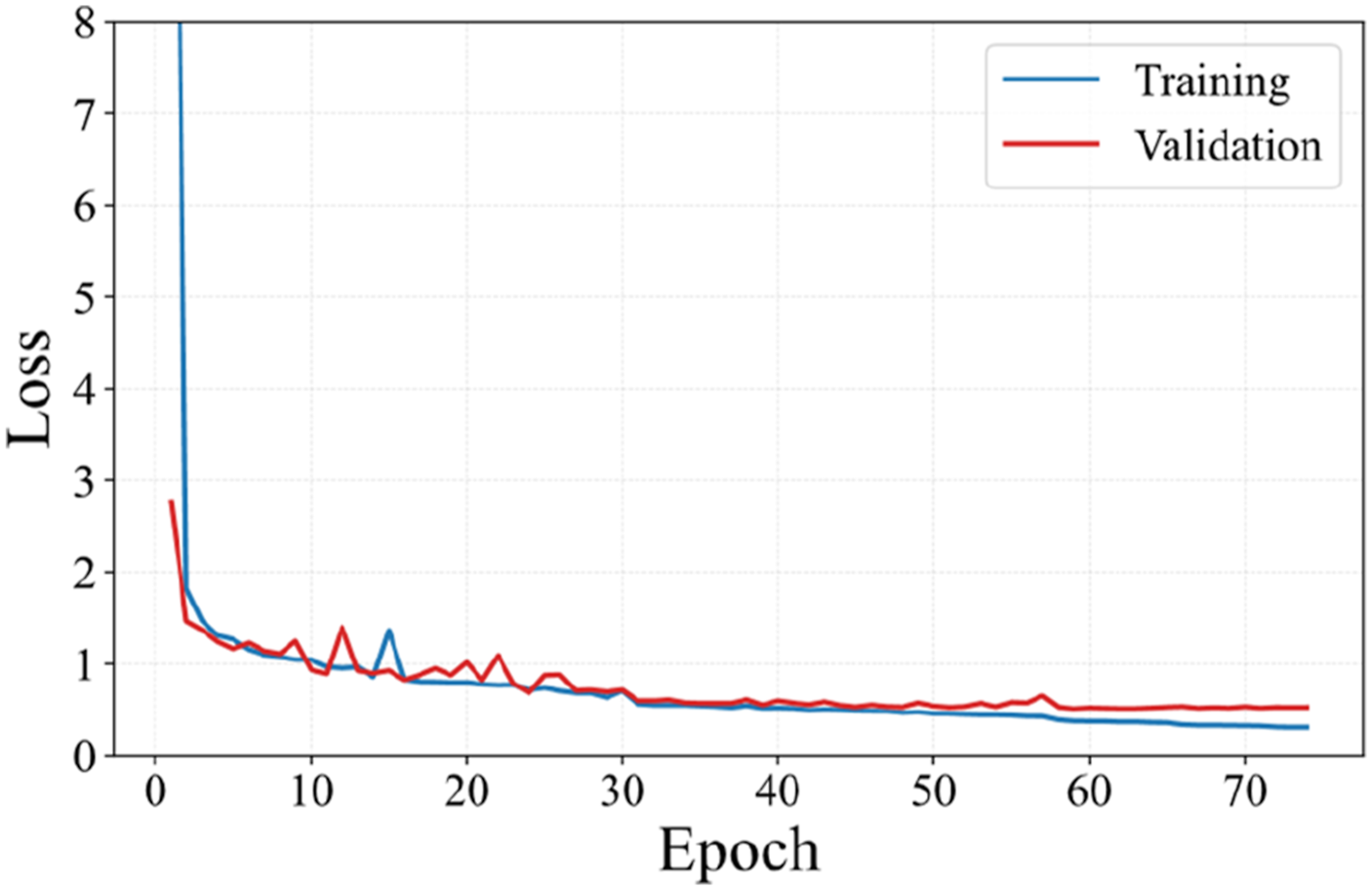
Subsequently, the method described in Section 2.2 was used to simulate random traffic flow and generate an MFI dataset corresponding to the real bridge, consisting of 27,000 samples. However, due to measurement noise and sensor errors, displacement data obtained from real bridges differ substantially from numerical simulation results. To improve the generalization performance of the model when applied to field data, noise is therefore introduced into the simulated displacement data, as expressed below: The loss and accuracy curves during training and validation.
Identification results
Since the sampling frequency of the displacement data collected from the real bridge test is 33.33 Hz, while the data from the numerical simulation has a sampling frequency of 50 Hz, and considering the significant noise in the raw displacement data, it is necessary to upsample and denoise the real bridge displacement data before using it for moving force identification. The noise reduction process uses the wavelet transform algorithm to remove the noise, and the basis function takes the db4 wavelet basis. Since the frequency range of the response data of research concern is roughly within 6 Hz, the number of decomposition layers is set to be
After preprocessing, the input data sequence for each truck test is extracted starting from a short interval prior to the vehicle-induced response becoming distinguishable from background vibration. In practice, the beginning of the input window is determined directly from the measured displacement by detecting a noticeable increase above the ambient noise level, without using any axle-detection equipment or vehicle information. A fixed-length window of 448 time steps is then used as the model input for all tests.
Summary of identification results.
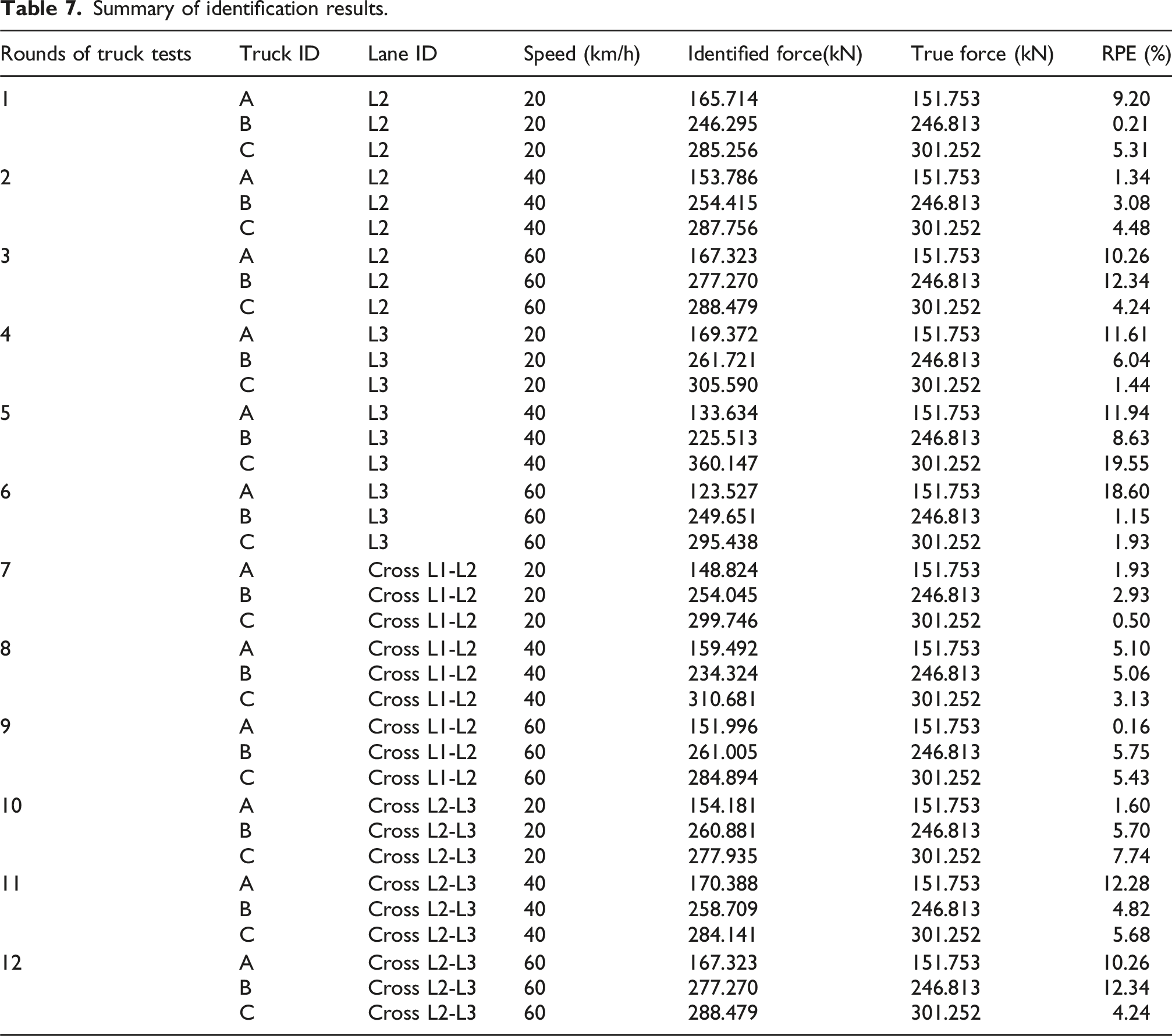
In a total of 36 tests, the mean RPE index of identified result is 6.28%. The box plots of RPE for trucks A, B and C are shown in Figure 14(a). As the axle force rises, the error of the identification tends to decrease. This can be attributed to the fact that a higher axle force leads to larger displacements in the bridge structure, making it easier for the model to identify the axle force. The box plots of the RPE at different speeds are shown in Figure 14(b). It can be observed that there is no significant difference in RPE as speed increases, indicating that the model is robust to changes in speed. Identification results for different conditions.
Representative time-history results of the MFI predictions are shown in Figure 15. The model accurately identifies the axle forces and detects the vehicle entry and exit events with good temporal precision. A transient force overshoot is observed when the front axle first enters the bridge, where the predicted force briefly exceeds the reference value before returning to a stable level. This behavior is likely caused by impact effects during vehicle entry, which can be induced by expansion joints or surface irregularities and may result in dynamic loads exceeding the static vehicle weight. Truck test identification results (total axle force).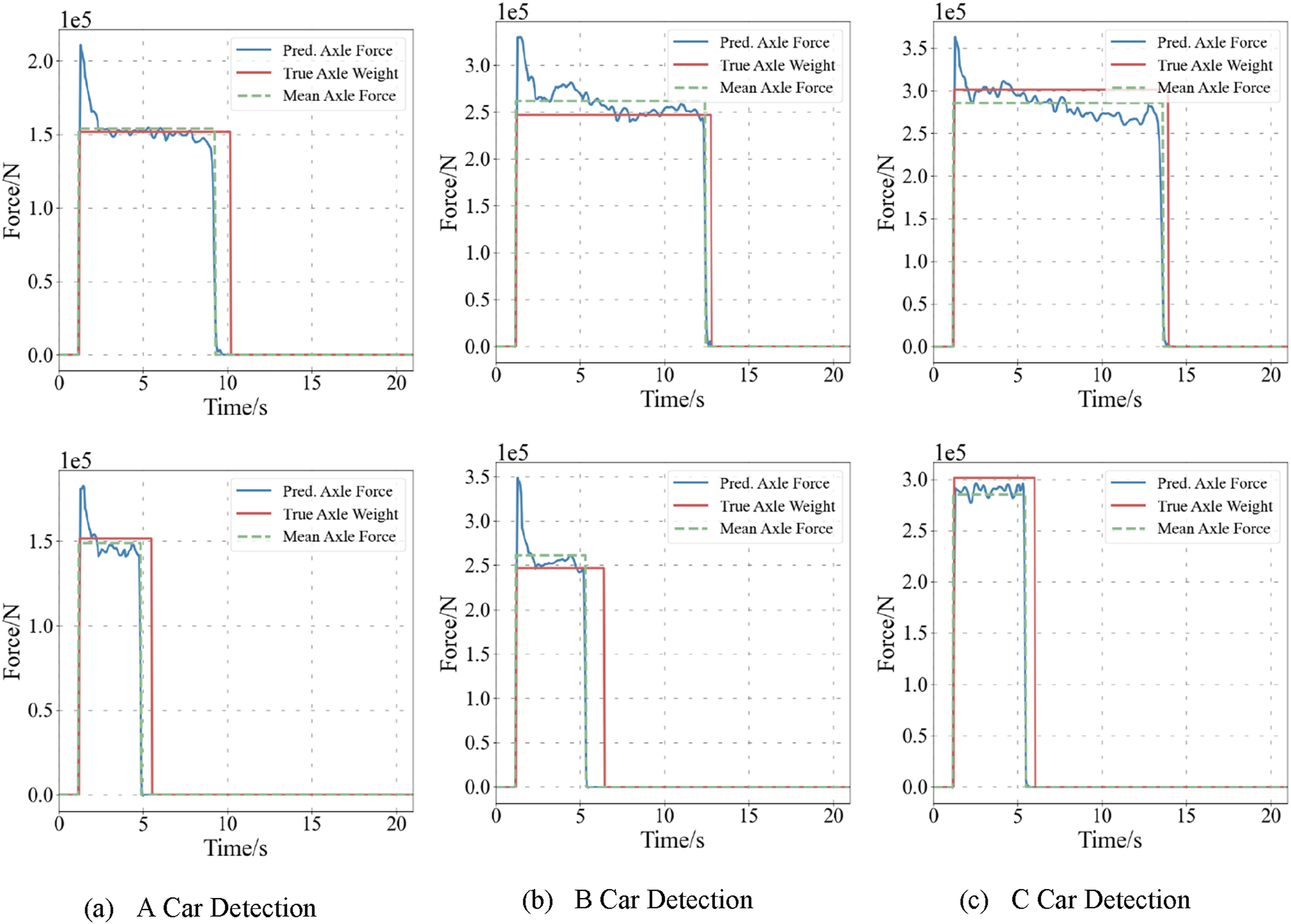
The performance of the model in identifying front and rear axle forces is further evaluated, with representative results shown in Figure 16. Compared with total axle force identification, individual axle force predictions exhibit larger errors and fluctuations. This is expected, as only a limited portion of the displacement response is dominated by a single axle, whereas the front and rear axles act simultaneously for most of the vehicle passage. Accurately separating individual axle forces from noisy measurements therefore remains a more challenging task. Truck test identification results (front and rear axle forces).
Conclusions
Based on a U-Net architecture, this paper proposes a moving force identification (MFI) method that relies solely on structural monitoring data and does not require prior knowledge of axle information, such as real-time axle positions or axle spacing. Bridge mid-span displacement responses are used as inputs to predict dynamic axle forces. The method is validated through numerical simulations covering a wide range of axle weights, axle spacings, and vehicle speeds to assess robustness. Furthermore, full-scale tests on a real bridge using three different trucks demonstrate the feasibility of the proposed approach for practical engineering applications.
The numerical results show that the U-Net model can accurately identify both total axle force and dynamic axle forces for the front and rear axles based on displacement data, even when axle information is unknown. The model demonstrates strong robustness against noise interference. The results of the actual bridge experiment show that the mean error of axle load identification is 6.28%. Even when the vehicle speed reaches up to 60 km/h, the proposed model is still able to identify dynamic axle loads with good accuracy.
However, there are some limitations in this study. First, the vehicle models considered are simplified to two-axle vehicles and single-vehicle loading scenarios, which may not fully reflect the complexity of real bridge operations under dense traffic conditions. Extending the proposed method to account for multi-vehicle loading scenarios will be an important topic of future research. In addition, although displacement data are used in this study, displacement responses can in principle be derived from acceleration measurements. Since acceleration sensors are generally lower in cost and easier to install than displacement sensors, developing a moving force identification method based entirely on acceleration data is another key direction for future work.
Footnotes
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This study is supported by the National Natural Science Foundation of China (52411540031; 52278313), and the National Key Research and Development Program of China (2025YFF0519200).
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.