
Abstract
Rotor eccentricities are one of the common faults in electrical machines. The influence of closed-loop vector controller on electromagnetic characteristics of Fractional-Slot Permanent Magnet Synchronous Machine (FS-PMSM) with rotor eccentricities is explored. Firstly, the distortion of air-gap flux density introduced by rotor eccentricities is analyzed, and the harmonics of air-gap flux density caused by rotor eccentricities are calculated. Secondly, the characteristics of the fundamentals and harmonics of back electromotive force (EMF) of FS-PMSM with rotor eccentricities are studied based on harmonic analysis. Finally, combined with the three-phase back-EMFs and the voltage equation, the characteristics of three-phase current of FS-PMSM fed by closed-loop vector controller with rotor eccentricities is studied. Thus, the influence of closed-loop vector controller on the torque characteristics of FS-PMSM with rotor eccentricity is studied. The field-circuit coupling simulation shows that static eccentricity causes unbalance in three-phase back-EMFs, but does not change the harmonic order. While dynamic eccentricity not only leads to the unbalance of three-phase back-EMFs, but also introduces even order harmonics. Under the compensation of closed-loop vector controller, the harmonic distribution of current is consistent with back-EMF and the magnitude of in-phase remains unchanged with static eccentricity while fluctuates with dynamic eccentricity. In addition, the torque fluctuation of FS-PMSM caused by rotor eccentricities is obviously reduced.
Keywords
Introduction
Due to its short winding ends, small volume, low torque ripple, and high fault tolerance performance, fractional-slot permanent magnet synchronous machine (FS-PMSM) has good development prospects in the field of electric vehicles (EVs) which has become a hot research topic for scholars in recent years (Cheng et al., 2015; Liu et al., 2020; Petrov et al., 2017). Considering the comfort and safety of drivers and passengers, the operating conditions of EVs have strict requirements for the stability and reliability of their driving machines. Rotor eccentricity is one of the common faults in EVs, which can be caused by factors such as uneven material distribution, processing and installation errors. Rotor eccentricity has significant impact on the electromagnetic performance of PMSM, such as unbalanced magnetic pull, vibration and even friction between the stator and rotor which will do severe damage to the machine (Kim et al., 2001; Wang et al., 2020; Zhou et al., 2021). In (Ren et al., 2022), an analytical model of air-gap flux density of PMSM with rotor eccentricity was established. With rotor eccentricity, the magnetic circuit is unbalanced, inducing shaft voltage at both ends of the rotating shaft (Park et al., 2018). At the same time, the back electromotive force (EMF), flux density and inductance remain unbalanced, resulting in position error and reducing the control accuracy of sensorless control (Wu et al., 2020). Moreover, the influence of rotor eccentricity on the performance of interior permanent magnet synchronous machine (IPMSM) is more significant than that of surface mounted permanent magnet synchronous machine (SPMSM) (Wu et al., 2013). The influence of rotor eccentricity on electromagnetic torque and loss characteristics of integer-slot and fractional-slot PMSM varies in load operation (Chen et al., 2023). Rotor eccentricity has little effect on the electromagnetic torque of rotational symmetric machine, but has significant effect on that of rotational asymmetric machine (Zhu et al., 2013; Zhu et al., 2014). The analyses in (He et al., 2022; Lee et al., 2020) showed that rotor eccentricity distorts the back-EMF waveform of the asymmetric rotational PMSM and worsen the torque waveform, but has little effect on the static torque.
The above studies have fully analyzed electromagnetic performance of PMSM with rotor eccentricity. However, the influence of closed-loop vector controller cannot be neglected (Bellini et al., 2000). Analysis in (Sui et al., 2019) showed that the closed-loop vector controller will change the amplitude and phase angle of remaining phase current under the open-circuit fault operation. Furthermore, an effective diagnosis method was proposed in (Chen et al., 2021) based on the analysis of the influence of the closed-loop vector controller on the open-circuit fault of PMSM. The impact of closed-loop control on fault diagnosis of interturn short-circuit faults was also analyzed in (Zafarani et al., 2018).
Therefore, it is of great significance to study the torque compensation of closed-loop vector controller for FS-PMSM with rotor eccentricity. Firstly, the harmonic characteristics of air-gap flux field of FS-PMSM with rotor eccentricity are analyzed. Furthermore, the influence of rotor eccentricity on the magnitude and phase angle of fundamental and harmonic of back-EMF is analyzed. Finally, the effects of closed-loop vector controller on voltage, current and torque characteristics of FS-PMSM with rotor eccentricity are studied by field-circuit coupling simulation.
Magnetic Field Characteristics
Model of Rotor Eccentricity
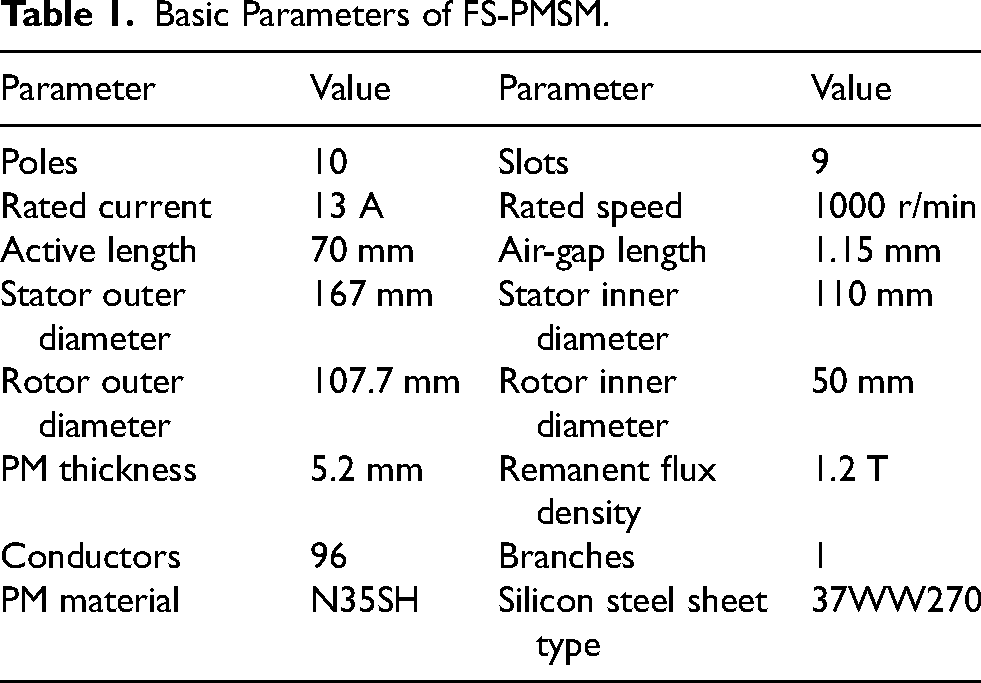
Electric vehicles often need to operate in a wide range of torque and speed, and their driving machines are mostly IPMSM to ensure high mechanical strength. In this paper, a 10-pole 9-slot IPMSM with shape of double-layer “V” structure for the rotor and double-layer concentrated windings is taken as an example for analysis. Its physical model is shown in Figure 1 to study the magnetic field characteristics of FS-PMSM with rotor eccentricity. The basic parameters of the model are shown in Table 1.

Model of 10-pole 9-slot FS-PMSM.
Basic Parameters of FS-PMSM.
The diagram of rotor eccentricity is shown in Figure 2. O1 is the geometric center of the stator, O2 is the geometric center of the rotor, Or is the actual rotation center of the rotor, ω is the rotor rotation angular velocity, α is rotor eccentricity angle, δ0 is the original air gap length, δε is the air-gap length of FS-PMSM with rotor eccentricity. ε is the eccentricity radio which equals to 1−(δε/δ0). With non-eccentricity (NE), O1, O2 and Or coincide.

Diagram of rotor eccentricity.
Rotor eccentricity is divided into three types: static eccentricity (SE), dynamic eccentricity (DE) and mixed eccentricity. With static eccentricity, Or coincides with O1, thus the length of the air-gap corresponding to each mechanical angle of the rotor does not change with the rotation of the rotor. With dynamic eccentricity, Or coincides with O2, thus the length of the air-gap corresponding to each mechanical angle of the rotor changes with the rotation of the rotor. Mixed eccentricity, in fact, is the case that static and dynamic eccentricity exist simultaneously, where Or does not coincide with either O1 or O2.
Air-gap Magnetic Field Characteristics
With rotor eccentricity, air-gap permeability can be expressed as a function of time and space (Ge et al., 2020). Further considering the influence of stator slotted, air-gap permeability with mixed eccentricity can be expressed as

The air-gap magnetic density with rotor eccentricity can be expressed as the product of air-gap magnetomotive force and air-gap permeability, which can be given by
The additional harmonics of air-gap flux density introduced by rotor eccentricity can be given by Eq. (5), where it represents the harmonics introduced by static eccentricity when i = 0, and represents the harmonics introduced by dynamic eccentricity when i = 1.

Spectrum of air-gap flux density of FS-PMSM with static and dynamic eccentricities.
The flux density cloud diagram of FS-PMSM with rotor eccentricity under no-load is shown in Figure 4.It is evident that the distribution of flux density is not uniform at different rotor positions with rotor eccentricity. The magnitude of flux density is higher where the air-gap is smaller, while it is lower where the air-gap length is bigger.

Flux density cloud diagram of FS-PMSM with rotor eccentricity fault.
The flux trajectory of FS-PMSM with static and dynamic eccentricities are shown in Figure 5.It can be seen that with static and dynamic eccentricities, the trajectory of flux linkage of is oval. With static eccentricity, due to the length of the air-gap of the machine remain unchanged, the flux trajectories in different periods coincide, but with dynamic eccentricity, the air-gap is rotating relative to the stator, the flux trajectory changes with time.
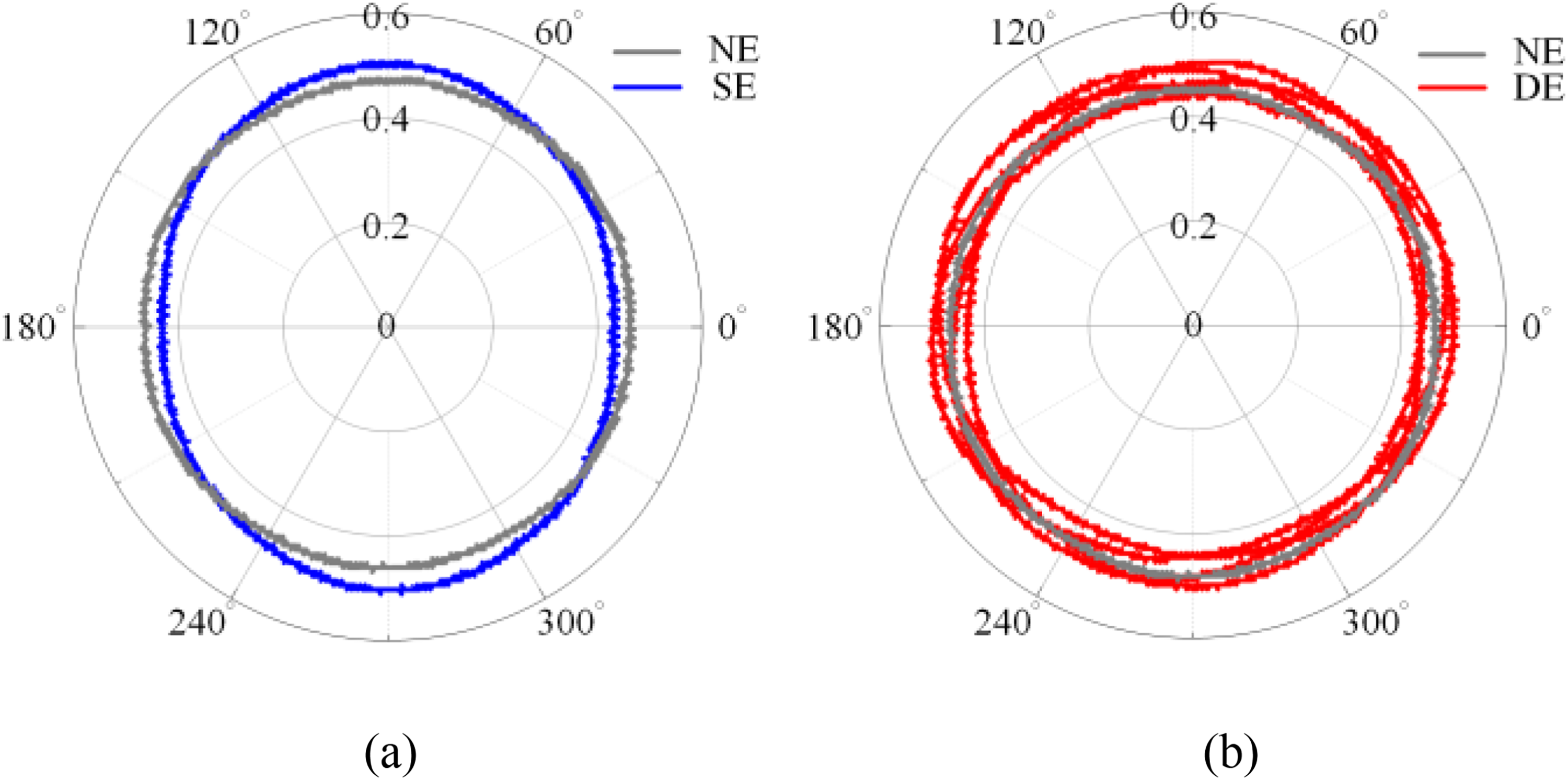
Flux trajectory of FS-PMSM with static and dynamic eccentricities.
Back-EMF Characteristics with Rotor Eccentricity
According to Figure 4 and Figure 5, the distribution of flux density with rotor eccentricity is uneven which will lead to the distortion of three-phase back-EMFs. Figure 6 shows the waveforms of the fundamental component of the three-phase back-EMFs with static and dynamic eccentricity at the speed of 1000r/min. The eccentricity angle α of the two eccentricity is 280deg and the eccentricity radio ε is 0.5.
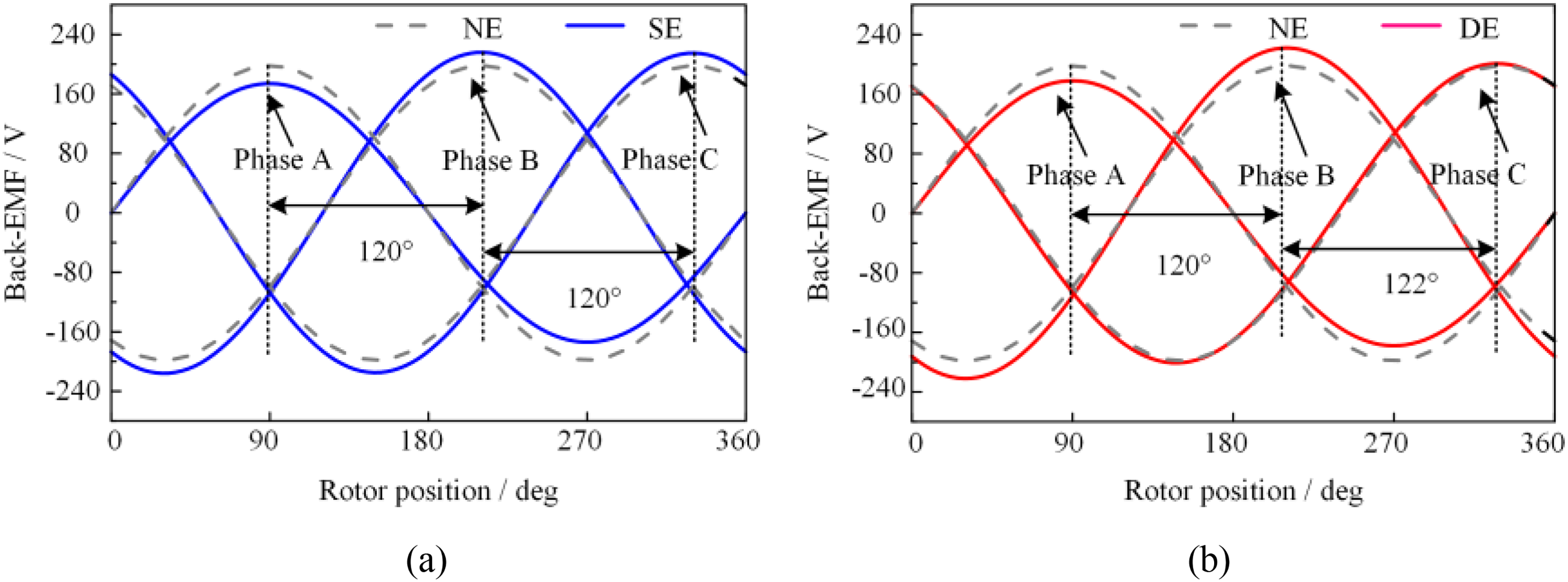
Three-phase back-EMFs of FS-PMSM with static and dynamic eccentricities.
It can be seen from Figure 6 under the eccentricity angle, the magnitude of the fundamentals of back-EMF of phase A with static and dynamic eccentricity decreases, while the fundamentals of the other two phases increases. With SE, the fundamentals of three-phase back-EMFs still lags by 120°, while with dynamic eccentricity, the fundamentals is slightly asymmetrical. Further, keep the eccentricity radio unchanged, the variation of fundamentals of back-EMF increment with rotor eccentricity angle is shown in Figure 7.
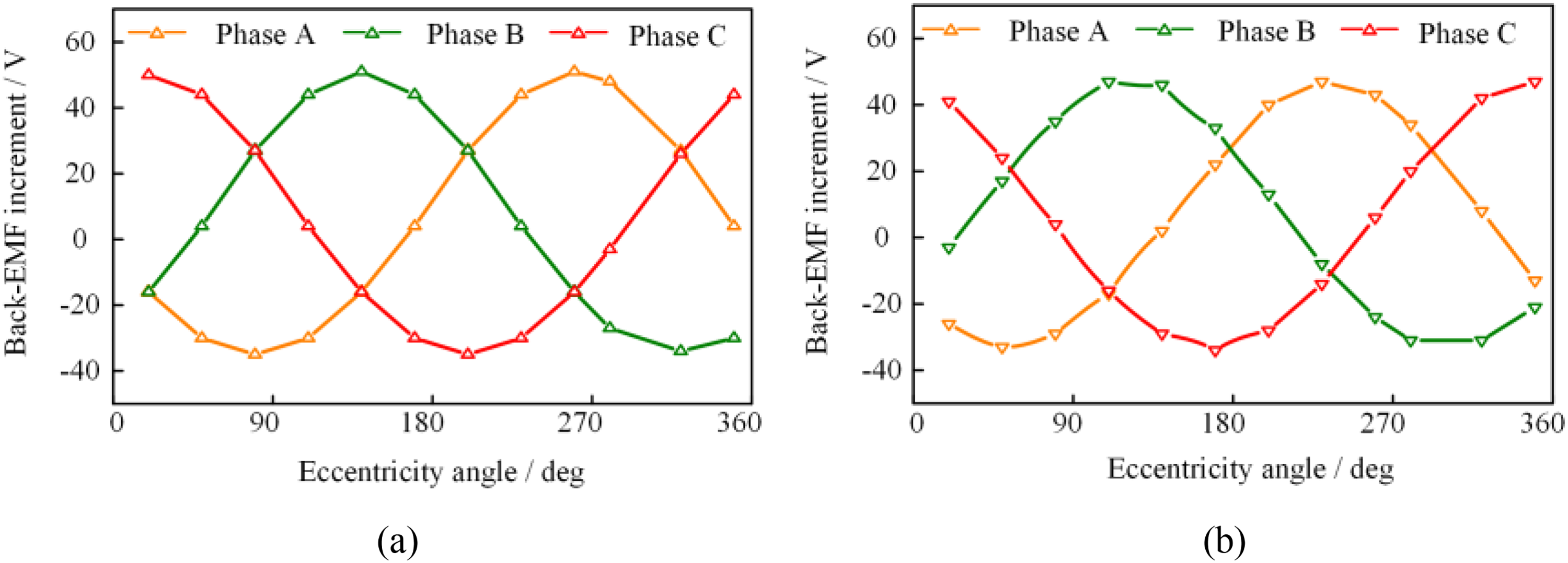
Variations of the increment of the fundamentals of three-phase back-EMFs with rotor eccentricity angle.
It can be seen from Figure 7, in a period, the increment of back-EMF varies periodically with the eccentricity angle, and its magnitude depends on the length of the air gap faced by the phase windings. The larger the air gap facing the phase windings, the smaller the magnitude of the back-EMF, and vice versa. The spectrum of back-EMF of phase A with rotor eccentricity is shown in Figure 8.
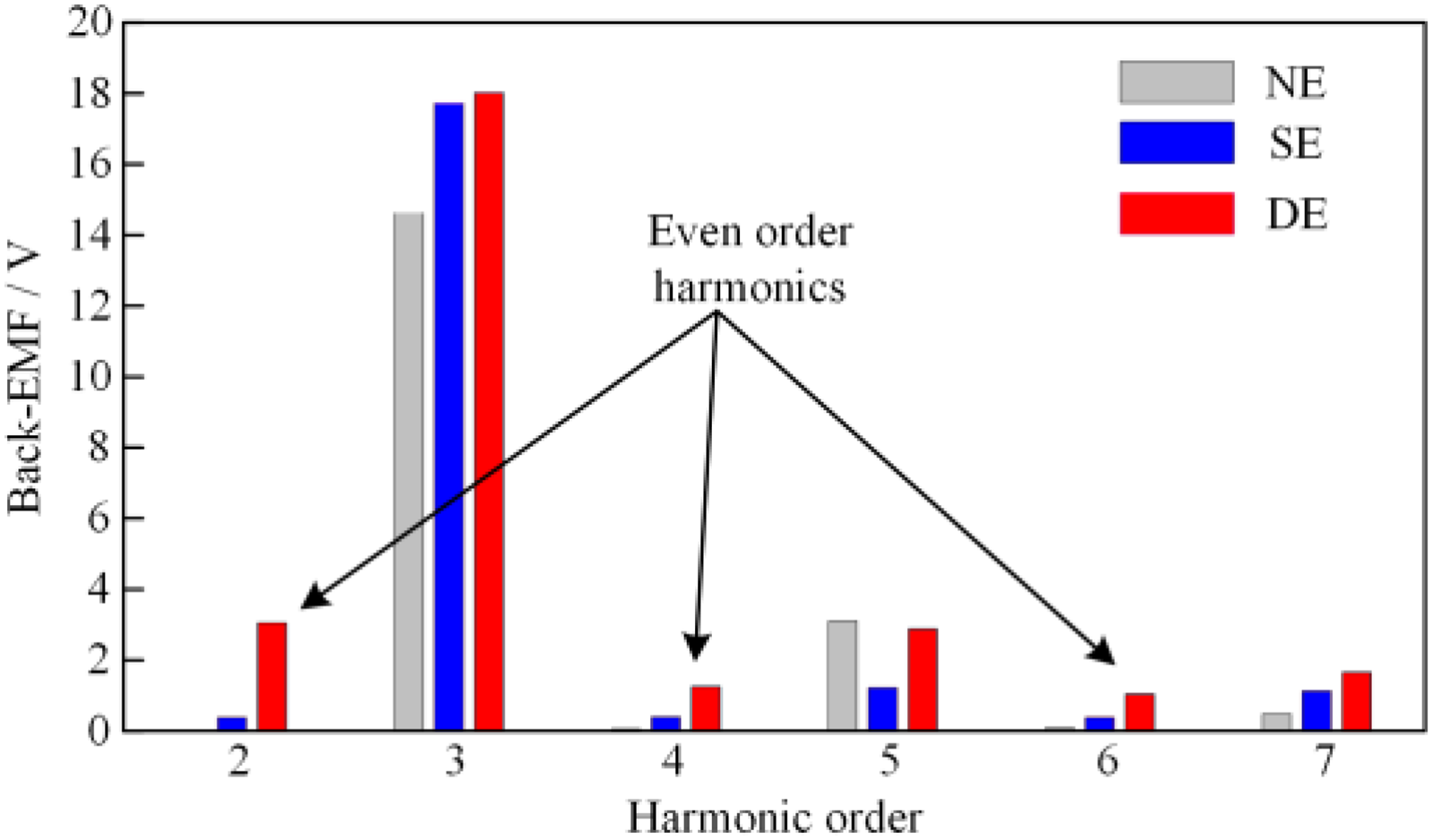
Spectrum back-EMF of phase A with static and dynamic eccentricities.
It can be seen from Figure 8, the magnitude of the harmonic order of back-EMF has changed with both static and dynamic eccentricity. Unlikely, even harmonic order of back-EMF are generated by dynamic eccentricity which is consistent with the analysis of Section I. Since the magnitude of the 3nd order harmonic of back-EMF is the largest, Figure 9 further focuses on the 3nd order harmonic of back-EMF with static and dynamic eccentricity, and uses σ as shown in Eq. (6) to describe the unbalanced degree of three-phase 3nd order harmonic of back-EMF caused by rotor eccentricity.

Variation of unbalanced degree of 3nd order harmonic of back-EMF with eccentricity ratio.
It can be seen from Figure 9, the magnitude and phase angle of the 3nd order harmonic of back-EMF are no longer the same under different eccentricity radio. Based on the above characteristics of three-phase back-EMFs with static and dynamic eccentricities, it can be given by
Influence of Closed-Loop Vector Controller
Closed-Loop Vector Controller
In this paper, the electromagnetic characteristics of FS-PMSM fed by closed-loop vector controller is further analyzed based on field-circuit coupling simulation. Figure 10. shows the block diagram of FS-PMSM fed by closed-loop vector controller. In the closed-loop vector controller, the finite element model described in Section I is adopt and the load of the machine is 20N·m. Maximum Torque Per Ampere (MTPA) and Space Vector Pulse Width Modulation (SVPWM) are adopted and the switching frequency is 10 kHz.
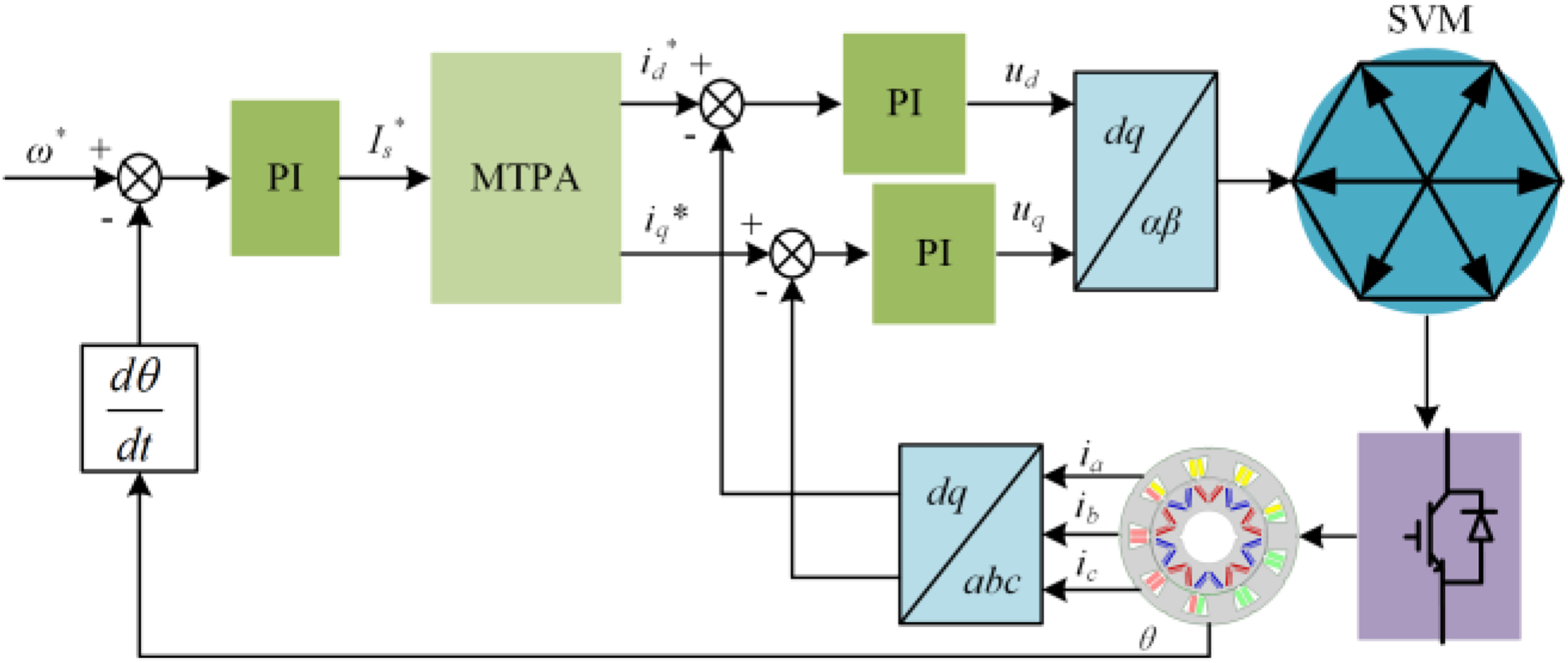
Block diagram of FS-PMSM fed by closed-loop vector controller.
Influence on Current
The voltage equation of FS-PMSM with rotor eccentricity can be expressed as
Combine Eq. (7) and Eq. (8), the three-phase current of FS-PMSM with rotor eccentricity can be given by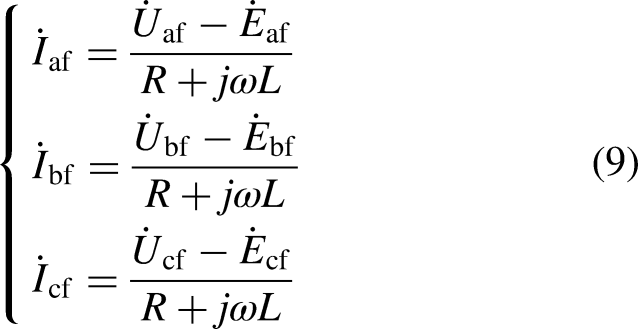
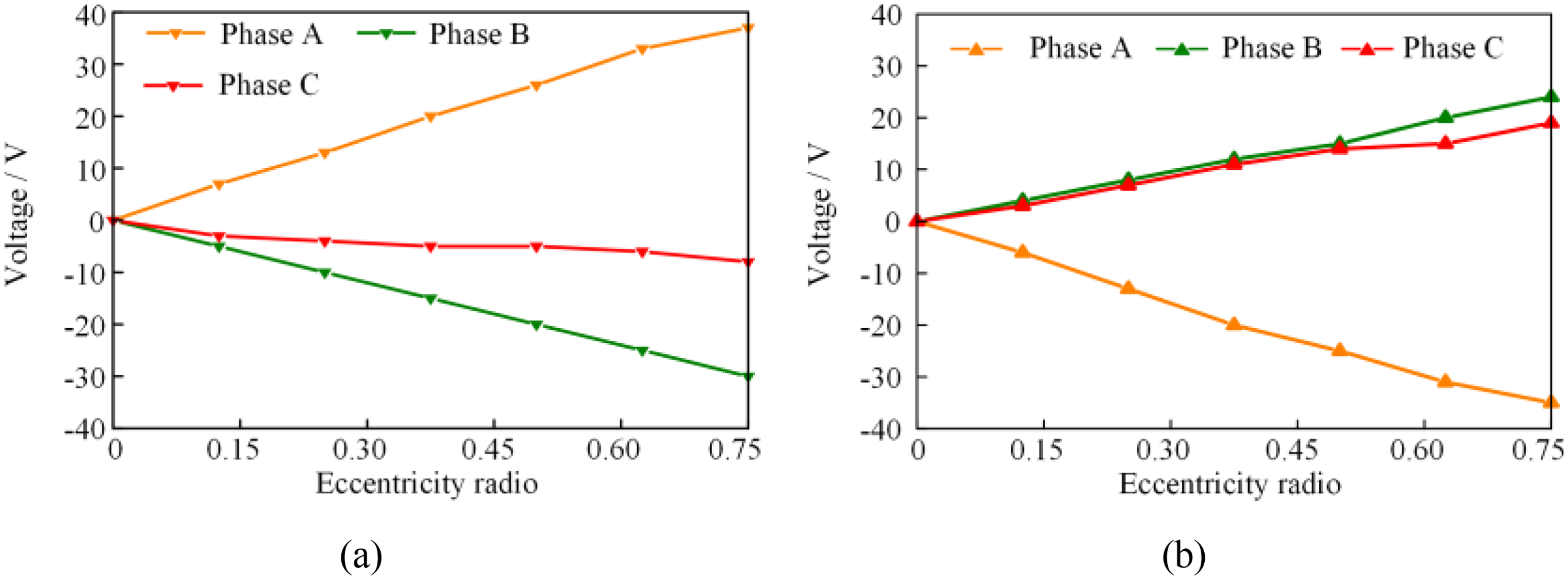
It can be seen from Figure 11, the closed-loop vector controller ultimately provides asymmetric three-phase voltage to FS-PMSM with rotor eccentricities. The asymmetric degree gets worse as the eccentricity radio increases which will mean that the machine requiring greater voltage drive when operate at the same speed. The three-phase current of FS-PMSM with rotor eccentricity are shown in Figure 12. As can be seen, the three-phase current is no longer balanced when there exists rotor eccentricity. Consistent with the analysis, the magnitude of the fundamental component of back-EMF of phase A decreases, resulting in an increase in its current magnitude. The magnitudes of the three-phase current of FS-PMSM with static eccentricity are the same, but fluctuate greatly with dynamic eccentricity which appears successively in the three-phase current.
Variation of magnitudes of the fundamentals of FS-PMSM fed by closed-loop vector controller with static and dynamic eccentricities.
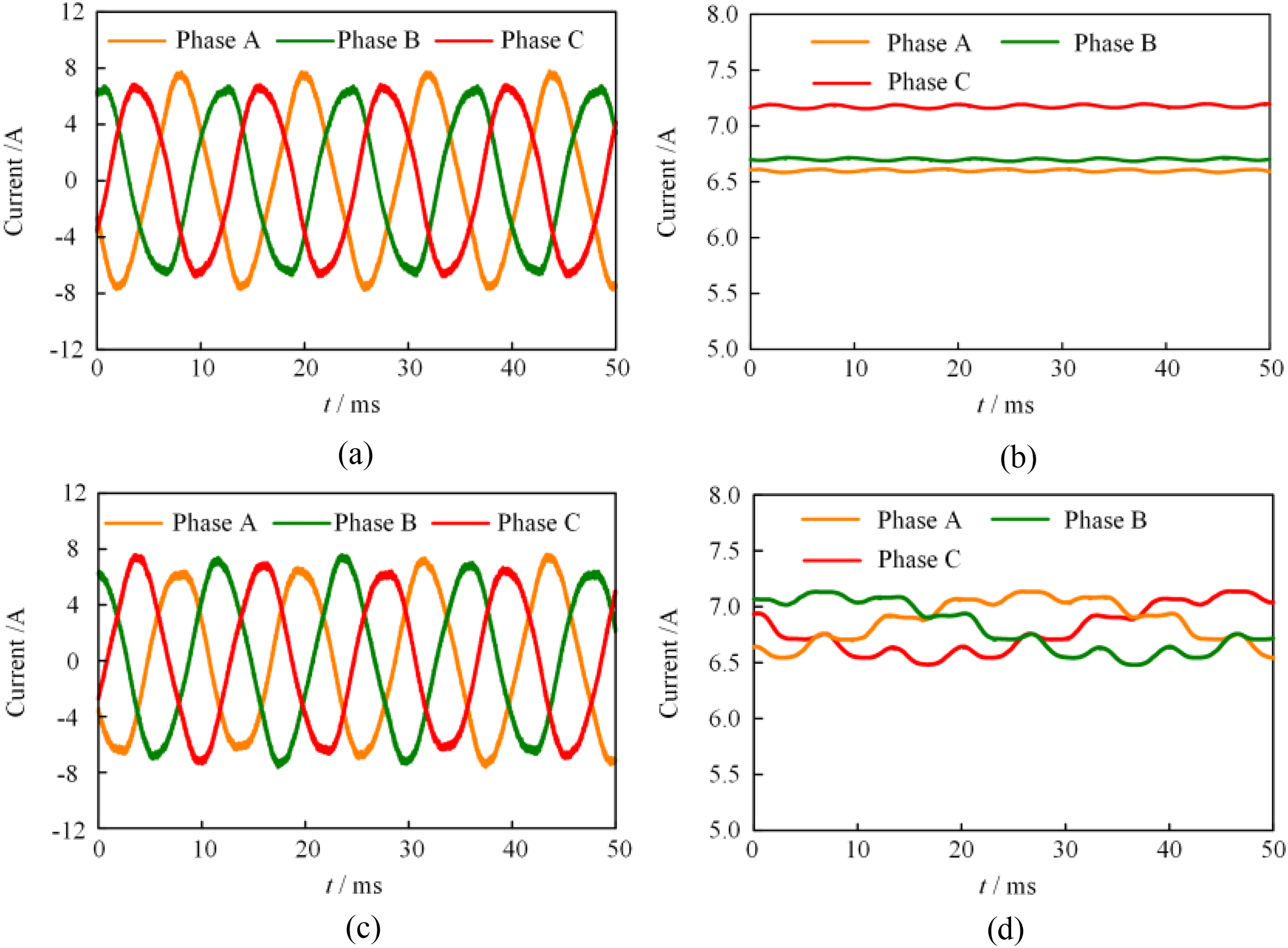
Three-phase current of FS-PMSM fed by closed-loop vector controller with static and dynamic eccentricities.
The harmonics of phase current of FS-PMSM with rotor eccentricity are further analyzed in Figure 13. It can be seen that both static and dynamic eccentricities lead to the 3nd order harmonic of phase current. In addition, dynamic eccentricity will also lead to even order harmonics, such as 2nd, 4nd, 6nd. It can be drawn that the harmonic order of the current is the same as that of the back-EMF which is consistent with the Eq. (9).

Spectrum of phase-A current of FS-PMSM fed by closed-loop vector controller with static and dynamic eccentricities.
Influence on Torque
Figure 14 shows the current trajectories of FS-PMSM with static and dynamic eccentricities fed by closed-loop vector controller. It can be seen that the current trajectories are also present oval shapes. With static eccentricity, the current trajectories within different periods are overlapped, while with static eccentricity, the current trajectories change with time due to the fluctuation of the magnitude of the in-phase current.
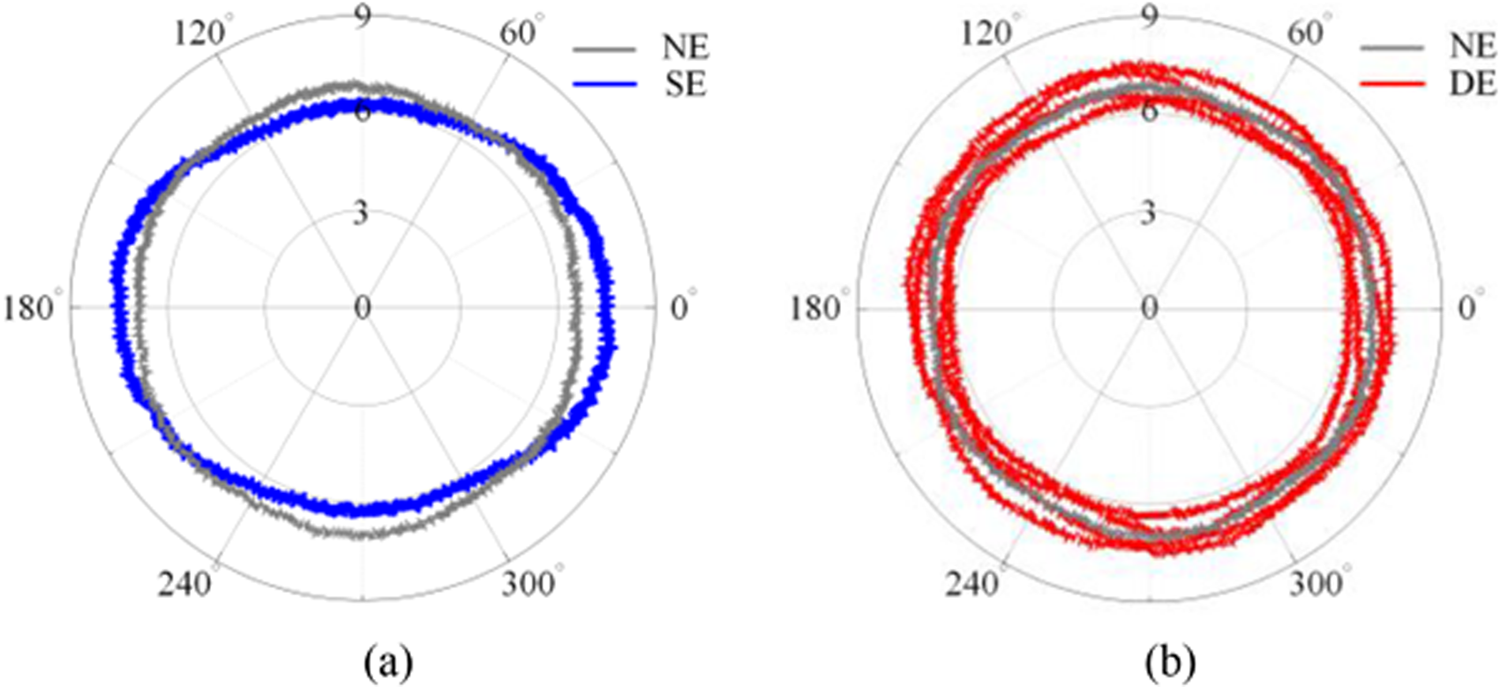
Current trajectory of FS-PMSM fed by closed-loop vector controller with static and dynamic eccentricities.
The torque of FS-PMSM with static and dynamic eccentricities fed by closed-loop vector controller is shown in Figure 15. It can be seen that the harmonic distributions of the torque with static and dynamic eccentricities are consistent with that of sinusoidal current excitation. Both static and dynamic eccentricities mainly lead to the 2nd order harmonic. Besides, the dynamic eccentricity also leads to the even order harmonics. Differently, the torque ripples of FS-PMSM fed by closed-loop vector controller are significantly smaller than that of FS-PMSM fed by sinusoidal current. Thus, the effect of rotor eccentricity on the torque of FS-PMSM is weakened by controller.
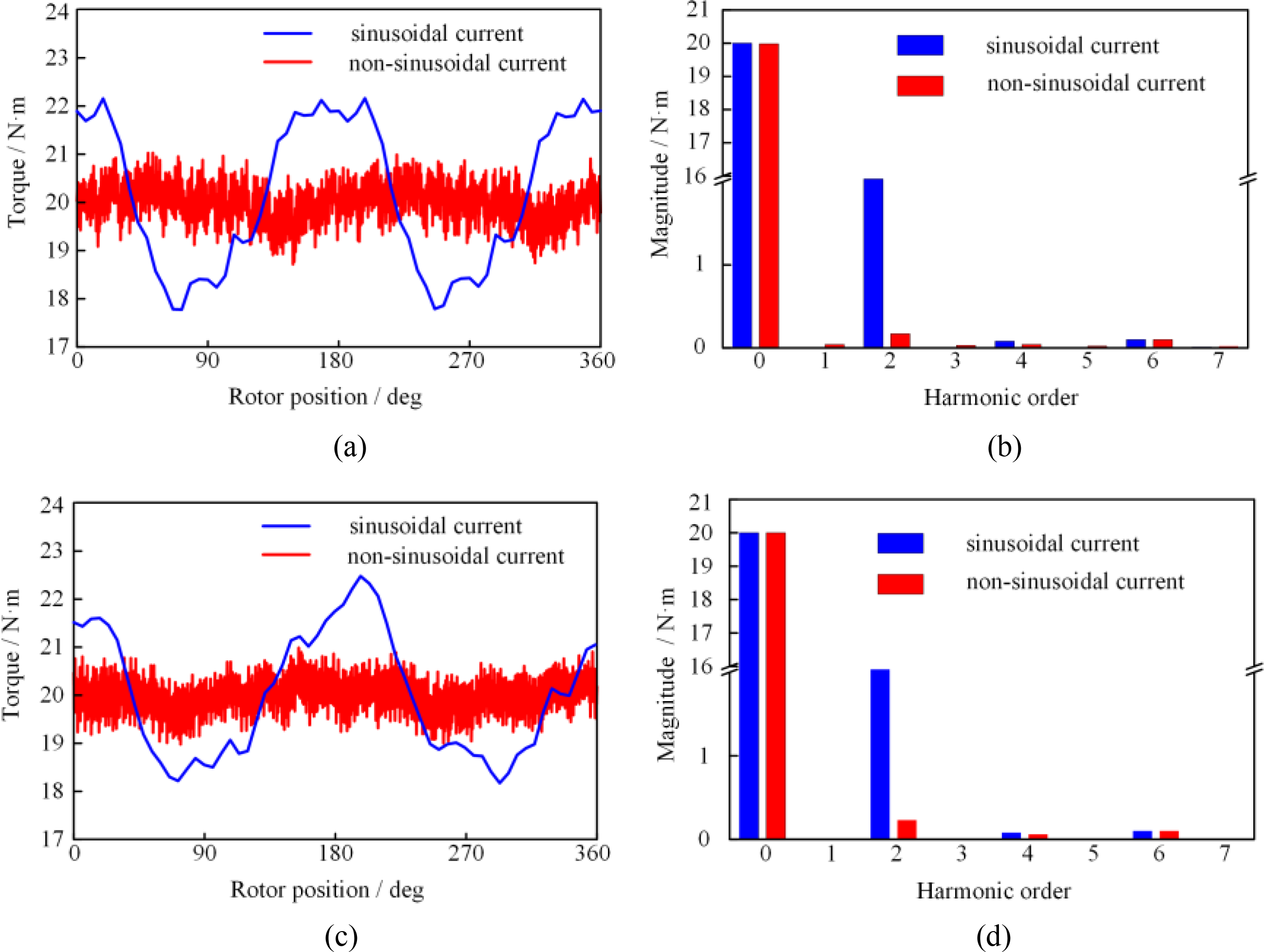
Torque of FS-PMSM fed by closed-loop vector controller with static and dynamic eccentricities.
Conclusion
The influence of closed-loop vector controller on flux density, back-EMF, current and torque characteristics of FS-PMSM with rotor eccentricity are analyzed. The compensation mechanism of closed-loop vector controller for torque performance of FS-PMSM is studied.
Study says with rotor eccentricity:
Static eccentricity causes unbalance in three-phase back-EMFs, but does not change the harmonic order. While dynamic eccentricity not only leads to the unbalance of three-phase back-EMFs, but also introduces even order harmonics. The magnitudes of in-phase current remain unchanged during different period with static eccentricity, while fluctuates greatly with dynamic eccentricity which appears successively in three phases. The distribution of three-phase current is consistent with three-phase back-EMFs. Under the compensation of closed-loop vector controller, the torque fluctuation of FS-PMSM caused by rotor eccentricities is significantly reduced compared with that under sinusoidal current excitation. The influence of rotor eccentricity on the torque of FS-PMSM is weakened by the closed-loop vector controller.
Footnotes
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Science Foundation of China under Grant 51907052.
Declaration of Conflicting Interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.