
Abstract
Novel rotor structures of an asymmetric interior permanent magnet (IPM) motor are realized by using the topology optimization (TO) in this study. The TO method to be presented in this article takes into account both the configuration of the magnet and the geometry of the magnetic core. In the optimization, the shape of the magnetic core is determined by a linear combination of the Gaussian basis functions, whereas the magnet configuration is determined by a Boolean geometry projection for its manufacturability. It is shown that the optimized asymmetric IPM motor exhibits better torque performance compared to the conventional TO which considers only the magnetic core.
Introduction
Interior permanent-magnet (IPM) motors have been widely used for transportation electrification owing to their high torque density and efficiency. Because the torque characteristics of IPM motors are determined by the configurations of the magnets and the form of the magnetic core within the rotor, it is critical to optimize these geometries to improve motor performance. Although various rotor topologies have been proposed in previous studies, asymmetric IPM motors with asymmetric flux barriers and magnet configurations have recently attracted attention.1–4 By effectively concentrating the magnetic flux in the direction of rotation, this motor is capable of substantially improving its torque performance without the need to increase the magnet usage. However, it is difficult to obtain a novel machine structure using parameter optimization (PO),1,2 which relies on the insights of experienced engineers.
In contrast to PO, topology optimization (TO) in which the material distribution is freely determined without presetting the shape parameters, can lead to novel rotor structures. In,3,4 iron and air in the rotor were optimized using TO, and asymmetric IPM motors with excellent performance were achieved. In prior research, however, solely the magnetic core's shape was taken into account, despite the fact that magnet configurations are critical for further performance enhancement.
In this paper, we simultaneously optimize the magnetic core and magnet configuration in an asymmetric IPM motor to obtain its novel rotor topology. The goal of this study is to clarify the unique magnetic properties of the optimized asymmetric IPM motors. In the optimization, the shape of the magnetic core is determined by TO using the Gaussian basis function, 5 whereas the magnet configuration is represented by the Boolean geometry projection (BGP) method, which combines PO with Boolean operations to improve for manufacturability. 6 In the study, the torque performance of symmetric and asymmetric IPM motors are optimized using conventional TO which considers only the magnetic core, and the BGP + TO method to compare the differences in these characteristics.
Optimization method
Boolean geometry projection (BGP) method
The reference and optimization models of the IPM motor are shown in Figure 1. The symmetric and asymmetric IPM motors have both been optimized to compare their performances. The specifications are listed in Table 1. The rotor surfaces with 1.0- and 0.5-mm thicknesses facing the shaft and the air gap were excluded from the design region to account for manufacturability. Assuming that the rotor is mirror symmetric, the red colored quarter- and half-design regions for each optimization model were optimized using the conventional TO and BGP + TO methods.
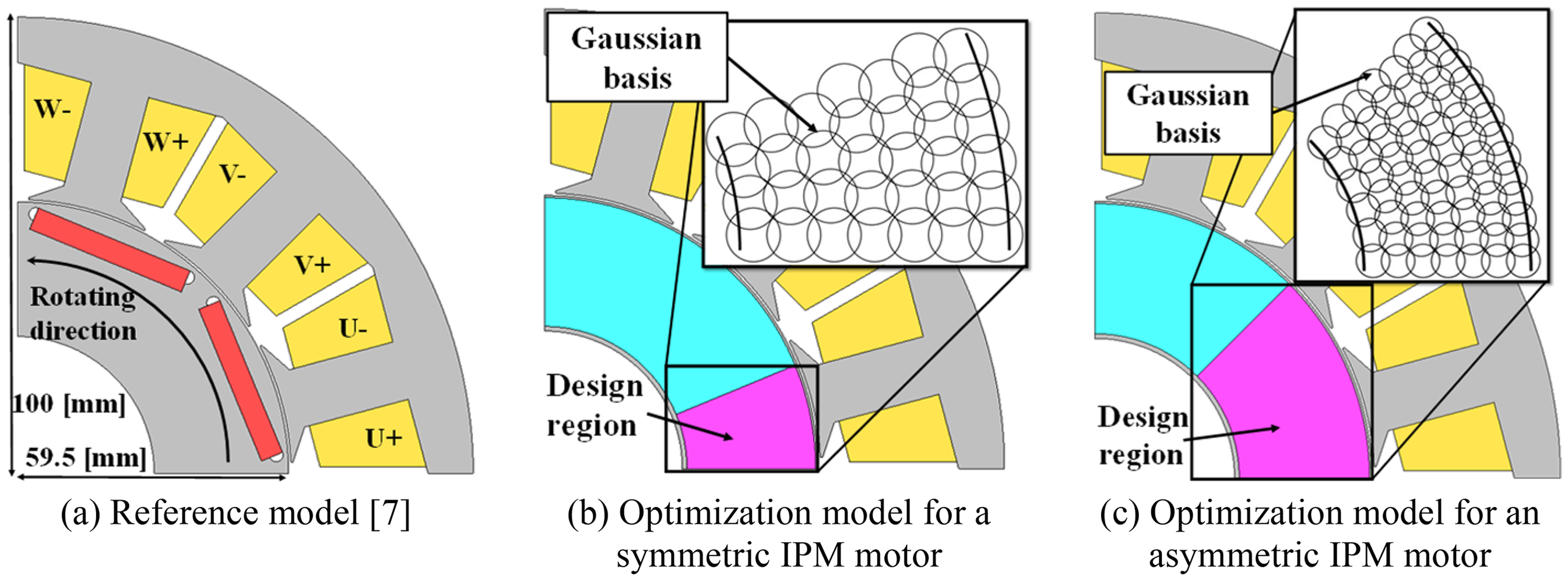
Reference and optimization models. (a) Reference model 7 (b) Optimization model for a symmetric IPM motor (c) Optimization model for an asymmetric IPM motor.
Specifications of the IPM motor. 7
In the BGP method,
6
the magnet configuration is represented by an elementary bar, as shown in Figure 2(a), to create a shape that satisfies the manufacturing constraints. The magnet is parameterized with five design variables, where
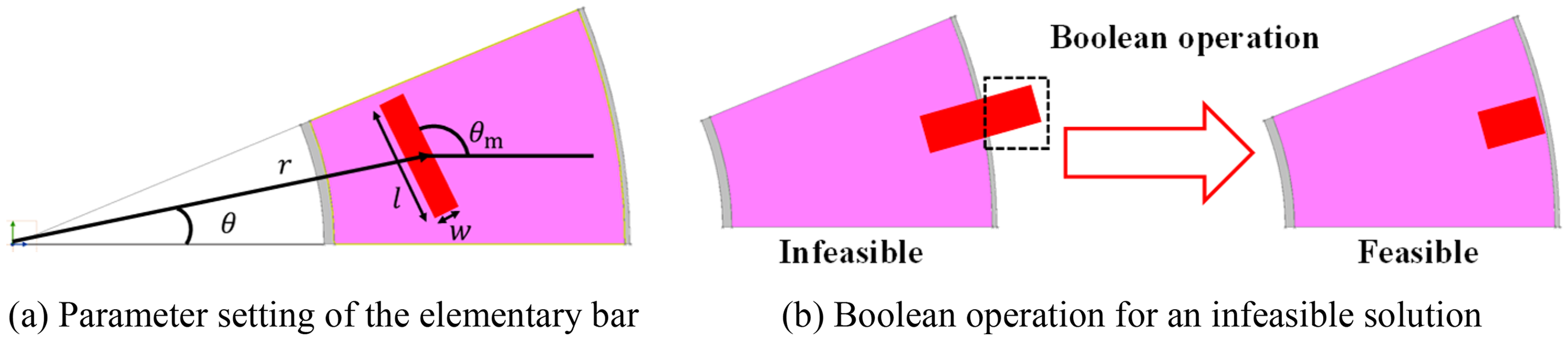
Boolean geometry projection method. 6 (a) parameter setting of the elementary bar (b) Boolean operation for an infeasible solution.
Topology optimization (TO) method
After determining the magnet configuration, the rotor shape excluding the magnet region was determined by TO using a normalized Gaussian function (NGnet).
5
In the TO, the material distribution in the design region is determined based on the output of the shape function, which is defined as follows: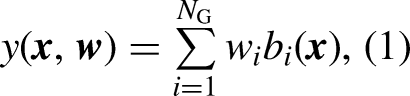

In TO, the weighting coefficients
In the BGP + TO method, the design variable
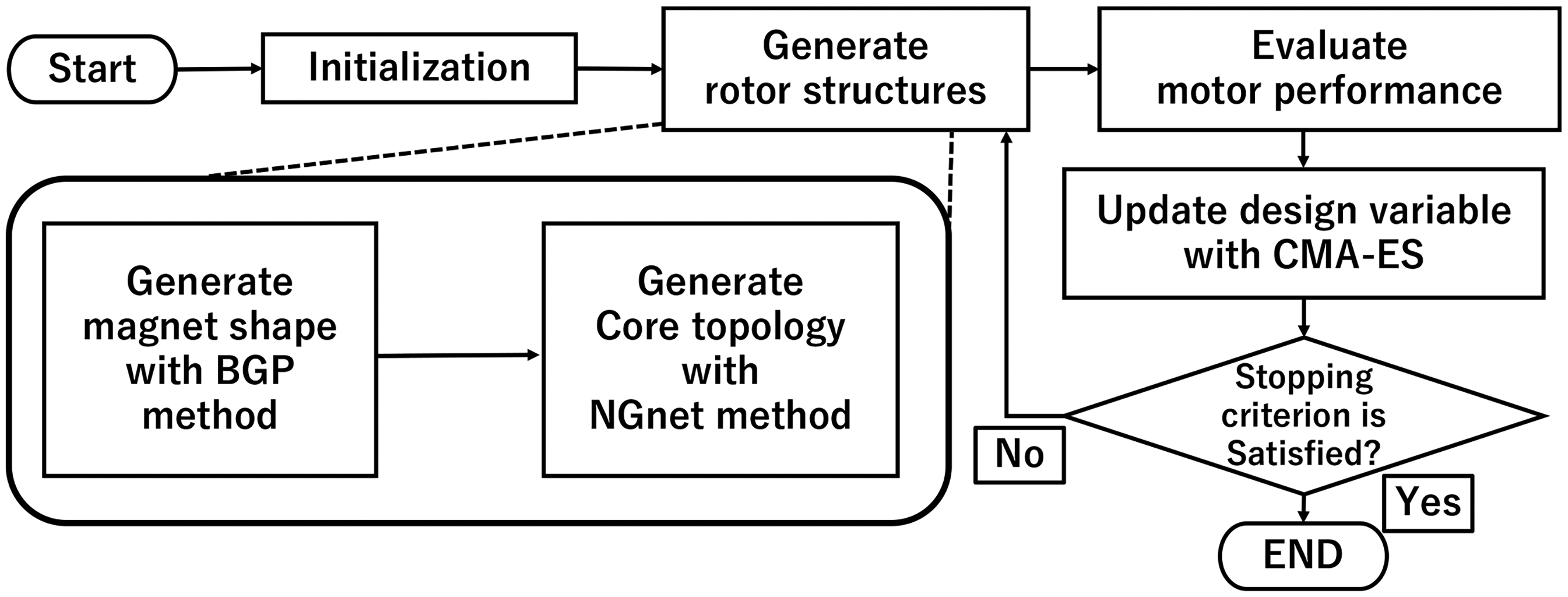
Flowchart of the BGP + TO method.
Optimization of the IPM motor
The purpose of the optimization is to maximize the average torque while minimizing the torque ripple. Therefore, the optimization problem is solved as follows: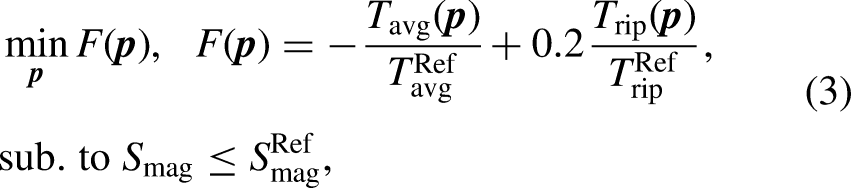
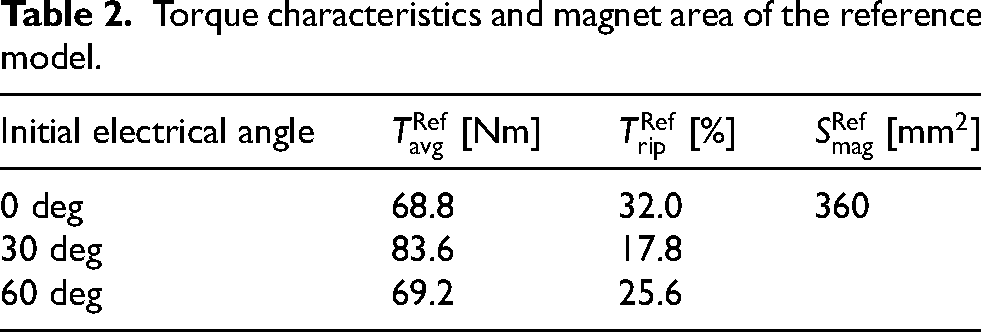
Torque characteristics and magnet area of the reference model.
Optimization results
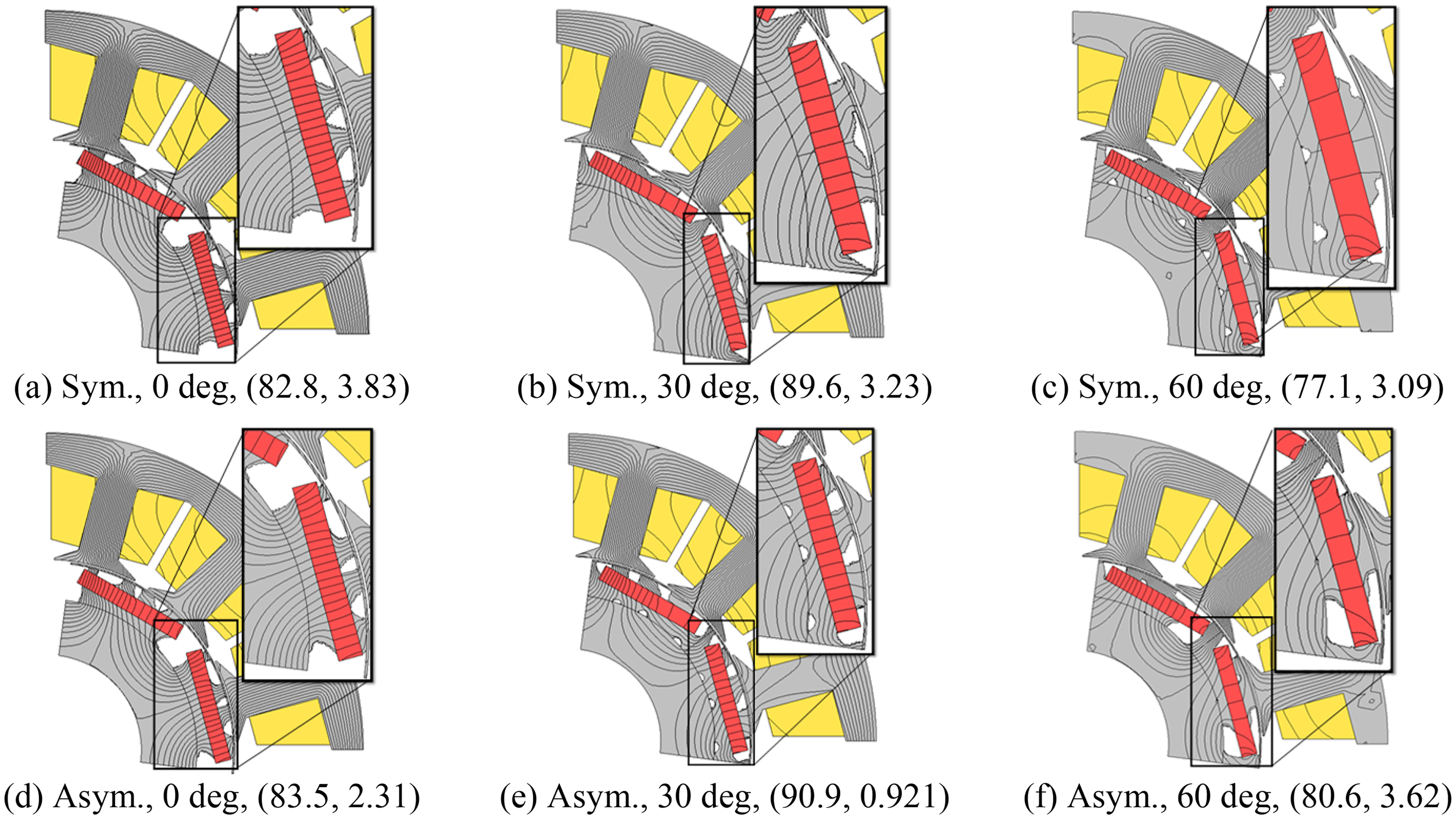
The resulting rotor shapes obtained using the conventional TO and BGP + TO methods are shown in Figures 4 and 5, respectively. The average torque and torque ripple of each model are summarized in the caption. It should be noted that there is only a slight difference in the magnet areas of the optimized IPM motors. From the conventional TO results shown in Figure 4, it can be seen that the optimized symmetric and asymmetric IPM motors have almost the same torque performance for each electrical angle, although their magnetic core shapes are different. In contrast, the optimized asymmetric IPM motors in Figure 5(d)–(f) obtained using the BGP + TO method have substantially higher average torques than the optimized symmetric motors in Figure 5(a)–(c), regardless of the electrical angle. It is noted that the thin magnet region is generated in Figure 5(d)–(f) because the demagnetization was not considered in the optimization.
Optimized rotor shapes obtained using the conventional TO (
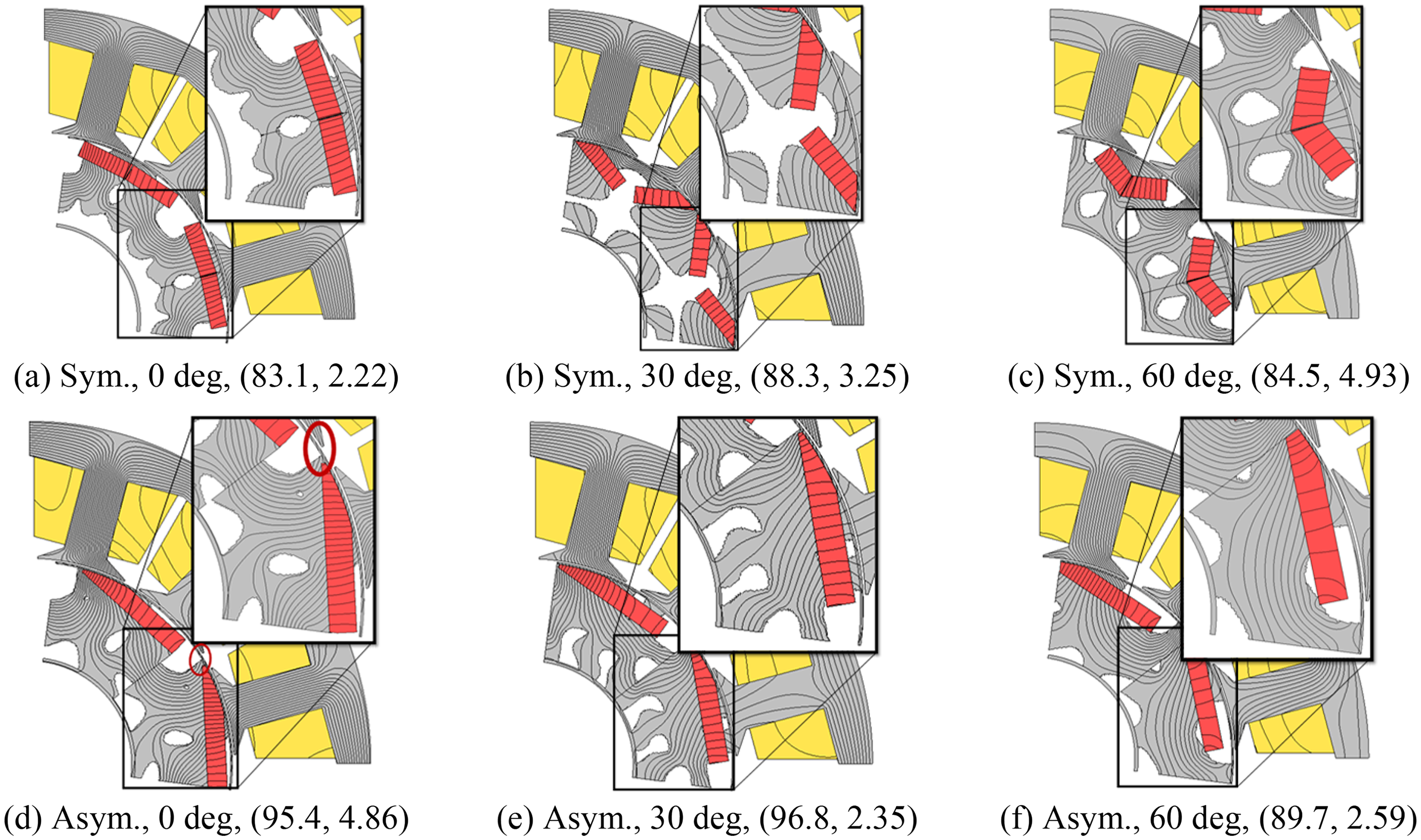
Optimized rotor shapes obtained with the BGP and TO (
To interpret the performance differences between these rotor shapes, we compare the decomposed torque characteristics shown in Figure 6, where the magnetic and reluctance torques were computed using the frozen permeability method. 11 It can be seen that the magnetic torque in the optimized asymmetric IPM motors obtained using the BGP + TO method is effectively improved at electrical angles of 30° and 60° compared with the other optimized models. This is due to the fact that the magnet configuration shown in Figures 5(d)–(f) is shifted in the rotation direction depending on the electrical angle to maximize the circumferential magnetic flux. However, it can be seen that the improvement in magnetic torque is limited to other optimized IPM motors at higher electrical angles because it is difficult to effectively increase the circumferential magnetic flux under fixed or symmetric magnet configurations. Moreover, the reluctance torque of the asymmetric IPM motor obtained using the BGP + TO method is significantly improved at an electrical angle of 0° because the asymmetric magnetic pole circled in red in Figure 5(d), was generated on the q-axis so that the magnetic flux increased in the rotation direction. This unique result can only be attained by asymmetric optimization. Although similar design principle (magnetic-field-shifting: MFS) to enhance the torque of an asymmetric IPM motor has been reported in the PO, 2 the variation of an optimal shape for different initial electrical angles was not discussed because of the geometrical complexity of asymmetric shapes. We clarified the above important point by using the BGP + TO method in this study. Finally, the torque ripple is significantly suppressed in the optimization results because the fluctuations in the magnetic and reluctance torques are canceled out, as shown in Figure 6(d). From the above results, it can be concluded that the BGP + TO method, which considers the magnet configuration and the shape of the magnetic core of the asymmetric IPM motor, is effective in improving the torque performance compared to the conventional TO.
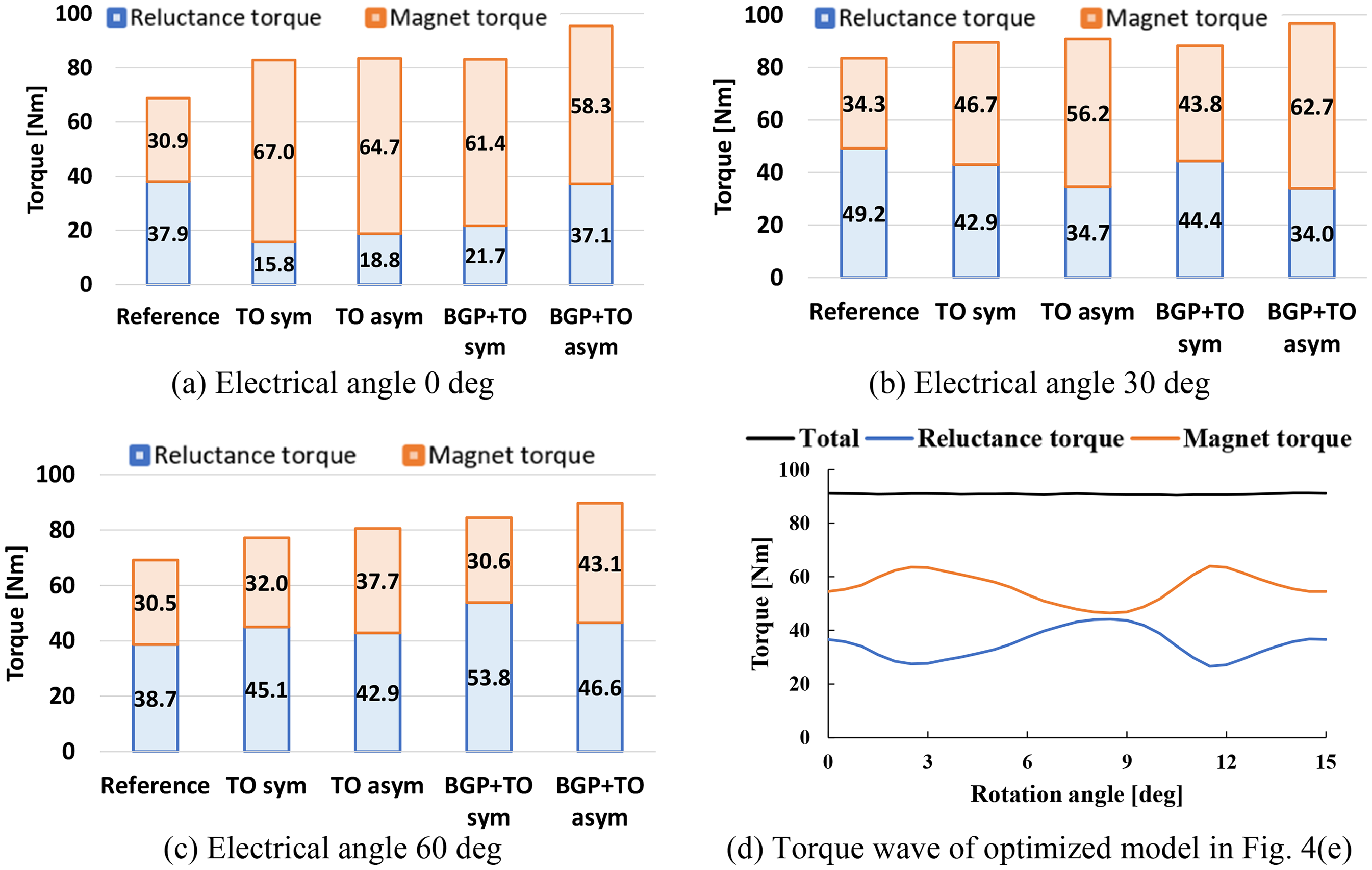
Decomposed torque characteristics of reference and optimized IPM motors (a) electrical angle 0 deg (b) electrical angle 30 deg (c) electrical angle 60 deg (d) Torque wave of optimized model in Figure 4(e).
Conclusion
The novel rotor structures considering the magnetic core and magnet configuration in an asymmetric IPM motor were presented in this study. It has been shown that the superior torque performance of the asymmetric IPM motors optimized by the BGP and TO methods has been demonstrated in comparison to the other optimized configurations. Moreover, we clarified the unique magnetic property of the asymmetric ones to the initial electrical angles. In the future, we intend to extend the BGP + TO method to realize asymmetric design for all rotor poles.
Footnotes
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported in part by the JSPS KAKENHI under Grant JP23K13312.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.