
Abstract
To adequately manage the growing demand for air mobility services, air traffic control systems must increase the density of aircraft in air space, which necessarily implies reducing the separation among them. This work deals with the use of runway approach procedures based on Dubins trajectories, as well as their 4D tracking by aircraft. A method is proposed to define a fictitious aircraft that will describe Dubins trajectories generating a 4D reference, and two tracking mechanisms (basic and improved) following this reference, which can be used by real (flyable) aircraft. These mechanisms have been evaluated in the Málaga airport (Spain), which has a high traffic density during the seasonal period. Simulation results verify their correct operation and high tracking accuracy.
Keywords
Introduction
According to the International Civil Aviation Organization (ICAO), global air traffic has progressively grown from 1.63 billion passengers in 2002 to 4.56 billion in 2019 Bureau (2020). Although in 2020 the COVID19 pandemic reduced this figure to 2004 levels, once it will be overcome, a rapid recovery of the sector is expected. To adequately manage the growing demand for air mobility services, air traffic control (ATC) systems must increase the density of aircraft in air space, which necessarily implies reducing the separation among them. One way to achieve this is by the use of 4D (3D plus time) trajectory-based operations (De Jong et al., 2011; Enea & Porretta, 2012; Guan et al., 2016, 2017; Klooster et al., 2008; Núñez et al., 2017; Pleter et al., 2009), in which aircraft must be able to move along pre-established routes with high accuracy, keeping the tracking error below a threshold considered unacceptable. Throughout the history of aviation, the complexity of flight routes, as well as the accuracy of their tracking, has progressively improved as technological advances have made it possible. Currently, new airspace concepts support extremely precise manoeuvers, even coordinated among several aircraft ((2016), ICAO).
In this work, we address the problem of aircraft guidance during the final approach flight phase. Starting with the definition of an approach maneuver based on Dubins curves (Dubins, 1957), a fictitious aircraft, acting as a 4D reference, traverses this trajectory with a non-flyable behaviour. On the other hand, the real aircraft, constrained to follow a flyable trajectory with progressive variations of the radius of curvature, employs an autopilot that tracks the aforementioned reference. The autopilot adjusts the aircraft’s heading and speed to reduce the tracking error. To assess our proposals, we have developed a simulator (implemented in MATLAB/Simulink) modelling the runway approach manoeuvre, the autopilot system, and the aircraft dynamics.
The rest of the manuscript is structured as follows. Section 2
Background on Aircraft Navigation
Air navigation may be defined as the process of determining the geographic position and maintaining the desired orientation of an aircraft relative to the Earth’s surface. In its early stages, aerial navigation relied primarily on visual references, offering limited possibilities. The incorporation of a compass on board allowed pilots to ascertain the aircraft’s heading (the angle between the longitudinal axis of the aircraft and the magnetic north). This innovation facilitated the adoption of a more sophisticated navigation technique known as ”dead reckoning”, wherein the aircraft’s position could be determined starting from a known position and direction and then proceeding at a specific speed for a defined duration.
Conventional Navigation
Subsequently, what it is now referred to as conventional instrument-based navigation became reliant on ground-based navigation aids, typically VOR (VHF Omnidirectional Radio Range) transmitters. Aircraft have the capability to determine the angle of the VOR signals they receive, enabling them to navigate along preestablished routes (airways) comprised of multiple legs involving a sequence of ground-based navigation aids (either to or from these ground stations). For instance, Figure 1 illustrates a scenario where an aircraft travels from an origin

Conventional navigation.
The later inclusion, among other systems, of DME (Distance Measuring Equipment) allowed a transition to area navigation (RNAV), a revolutionary method in which aircraft operate on any desired flight path. In this environment, a route is composed of a sequence of abstract waypoints (not necessarily correlated with ground VOR/DME transmitters). The aircraft heads to the waypoint by triangulating the information it obtains from various ground beacons and with RNAV, navigation increases in flexibility, taking on a vital role in ATM efficiency whilst also sustaining safety performance. Figure 2 shows the same example of Figure 1 where the aircraft follows a desired route, defined by 4 waypoints, independent of the 2 radio beacons. The different types of RNAV operations are RNAV 1, RNAV 2, RNAV 5, and RNAV 10. The number indicated in the name refers to the permissible navigation error (as described in the subsection 2.5

RNAV navigation.
Although RNAV was a considerable improvement in the definition of trajectories followed by aircraft, it does not establish any restriction to the permissible error in their tracking. Moreover, it does not solve the problem of transit from one waypoint to the next, which implies a change of course. Two possibilities are envisaged, on the one hand, a fly-by waypoint will be one where the pilot is required to use turn anticipation to avoid overshoot of the next flight segment. On the other hand, a fly-over waypoint postpones any turn until the waypoint is overflown, and then, the pilot should perform an intercept maneuver of the next flight segment. In any case, the trajectory of the turn is not defined, forcing the pilot to improvise on the fly. This methodology is unacceptable in scenarios with congested airspaces and reduced separation minima among aircraft. Required Navigation Performance (RNP) ((2009), ICAO) is a new methodology that aims to eliminate the previous problem. One of the key differences is that the navigation specifications incorporate on-board performance monitoring and alerting requirements. In addition, RNP explicitly contemplates segments in the form of a circumferential arc (RF, radius to fix legs), indicating to the pilot the exact way to make a course change between consecutive waypoints. Figure 3 shows the same example of previous figures where the aircraft follows a delimited route including straight and curvilinear sections. The most important RNP specifications are RNP 1, RNP 4, Advanced RNP, RNP AR APCH (for approach procedures with vertical guidance), and RNP 0.3 (for helicopters).
RNP navigation.
Historically, the waypoints contained in the RNAV and RNP specifications have been defined in terms of the sensors used to locate them (VOR/DME systems, GNSS
Aircraft Navigation Error
Figure 4(a) shows the various contributions to navigation error for an aircraft following a
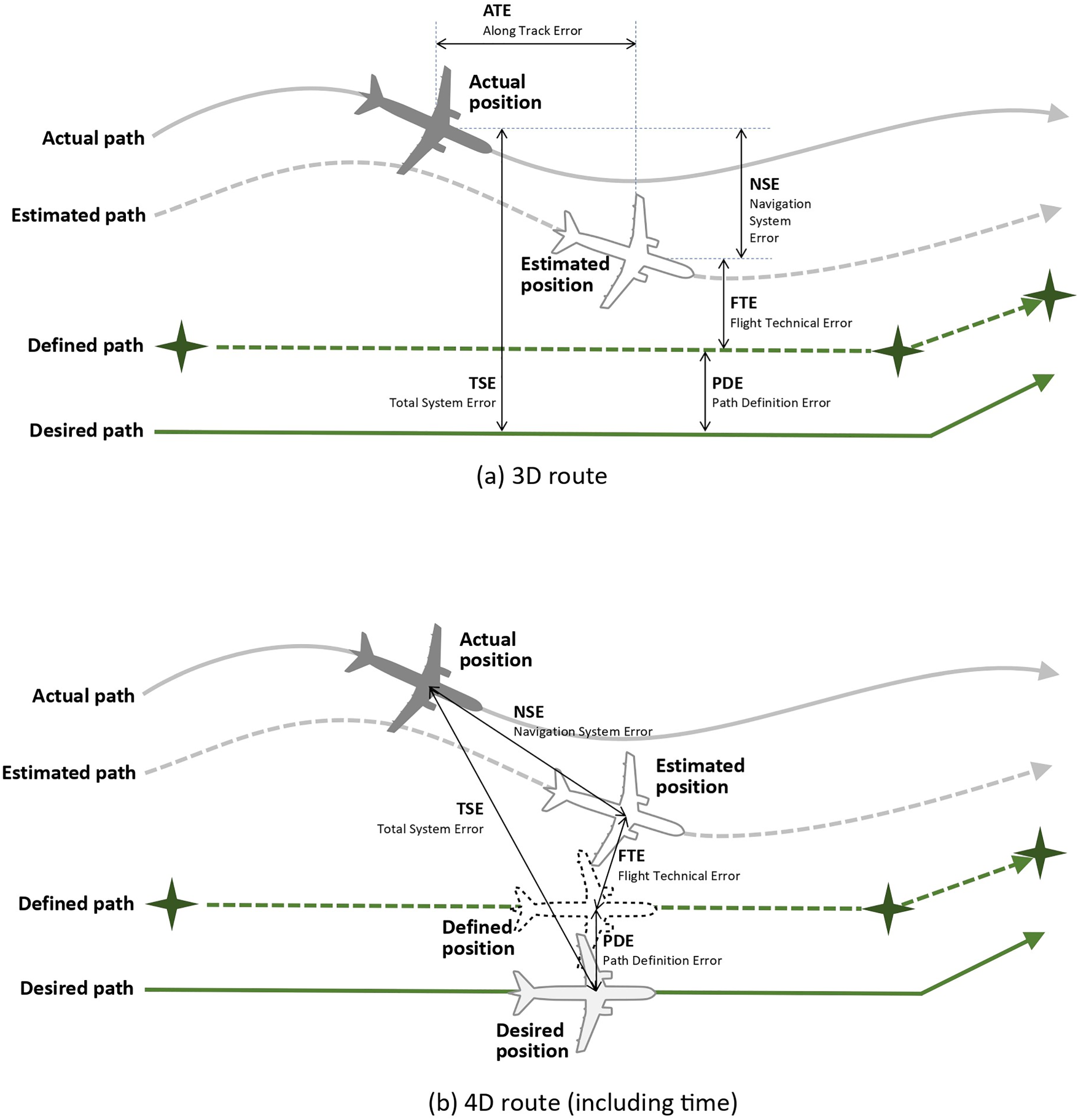
Aircraft navigation error.
First, we will establish the airspace frame and the waypoint-based navigation procedure we assume autopilots follow. Then, we will describe the model for Dubins (reference) and flyable (real) aircraft and three different autopilots. The general relationship among all these components is shown in Figure 5. A preliminary version of some of these models can be found in Casado et al. (2021)

Overall relationship among mathematical models.
We present the coordinate transformation from the navigation frame to a local tangent frame, which is essential for the path-following strategy employed in this study. In our assumptions, we consider the Earth’s surface to be flat, allowing us to represent the airspace using three vectors
In summary, the position and heading of an aircraft at a given moment are expressed by its pose

3D airspace model.
Dubins curves (Dubins, 1957) are a mathematical tool widely used in the definition of aircraft and unmanned aerial vehicle trajectories (Chen et al., 2023; Haghighi et al., 2022; Lin & Saripalli, 2014). The Dubins problem consists of finding the shortest connection between two points in a plane while maintaining a restriction on the curvature. A Dubins trajectory is a sequence of segments, in which each of them can be rectilinear or an arc with preestablished constant radius. There cannot be two consecutive rectilinear segments in the sequence, with straight lines and curves usually alternating.
As described in Section Background on Aircraft Navigation, RNP procedures may naturally contain curved segments, but RNAV procedures do not. However, it is possible for an RNAV procedure to conform to a Dubins trajectory, if we calculate the exact point at which the aircraft must transit from the curved fly-by waypoint to the next waypoint in the sequence. Figure 7 shows an example of RNAV procedure defined for a sequence

RNAV approach executed as a Dubins trajectory.
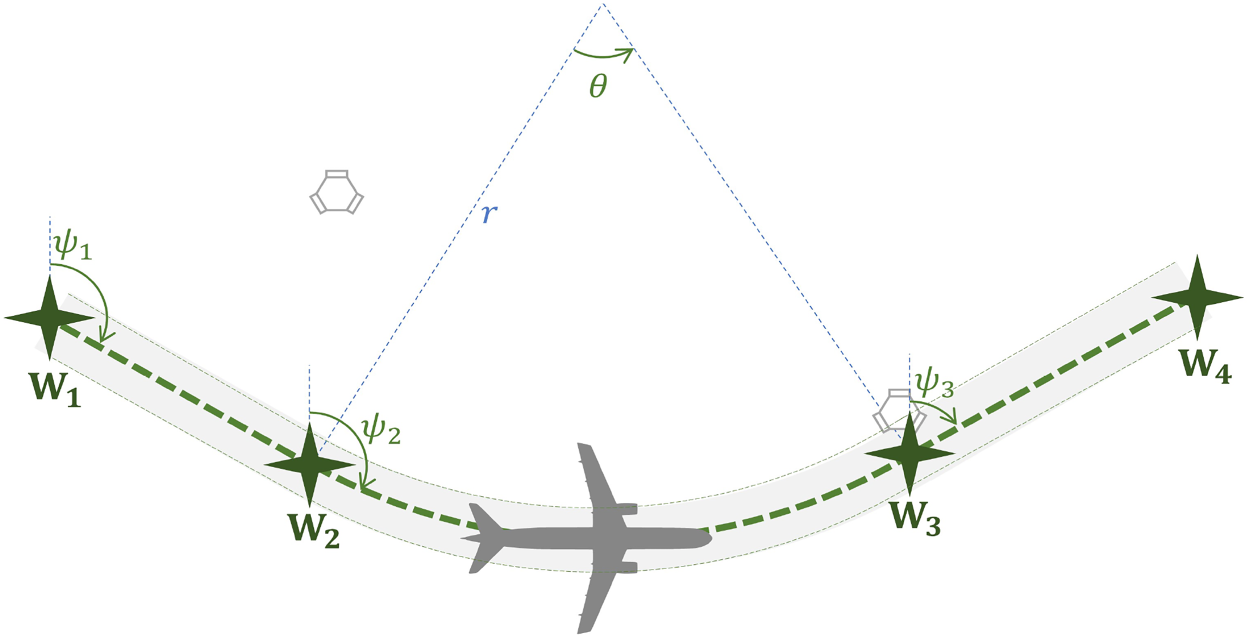
In our proposal, transit points between waypoints are computed as illustrated in Figure 8. Assuming the waypoints sequence

Transition point computation.
Transition Point Computation Algorithm.
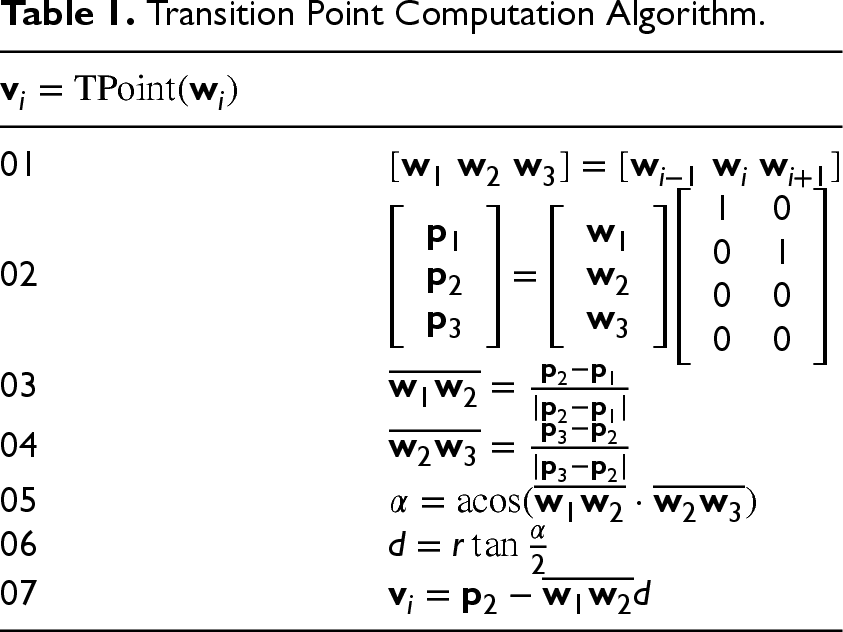
Given an aircraft with pose 
The behavior of the pilot of a Dubins aircraft can be modeled as a function DubinsPilot that is continuously executed.
Table 2 shows the autopilot procedure implemented in our model. Given an aircraft pose (01) and a waypoint (02), this function computes the corresponding vector

Distances involved in vertical speed computation.
Dubins Aircraft Guidance Algorithm.

Figure 10 shows the relative position of vectors

Turn direction computation.
In this section, we describe the behavior of a realistic aircraft which, following a flyable trajectory, tries to track the 
In this model, three second-order dynamic systems (with natural frequencies

Flyable aircraft control parameters.
Flyable Aircraft Control Algorithm.

Theoretically, the segments into which a Dubins trajectory is decomposed are straight lines or arcs of circumference. However, the navigation algorithm described in the previous section is executed periodically (every second in our analysis), which inherently brings an error component. The practical consequence is that the aircraft does not perform completely straight segments, but with small oscillations to the left and right. The tracking algorithm executed by the flyable aircraft is sensitive to these oscillations.
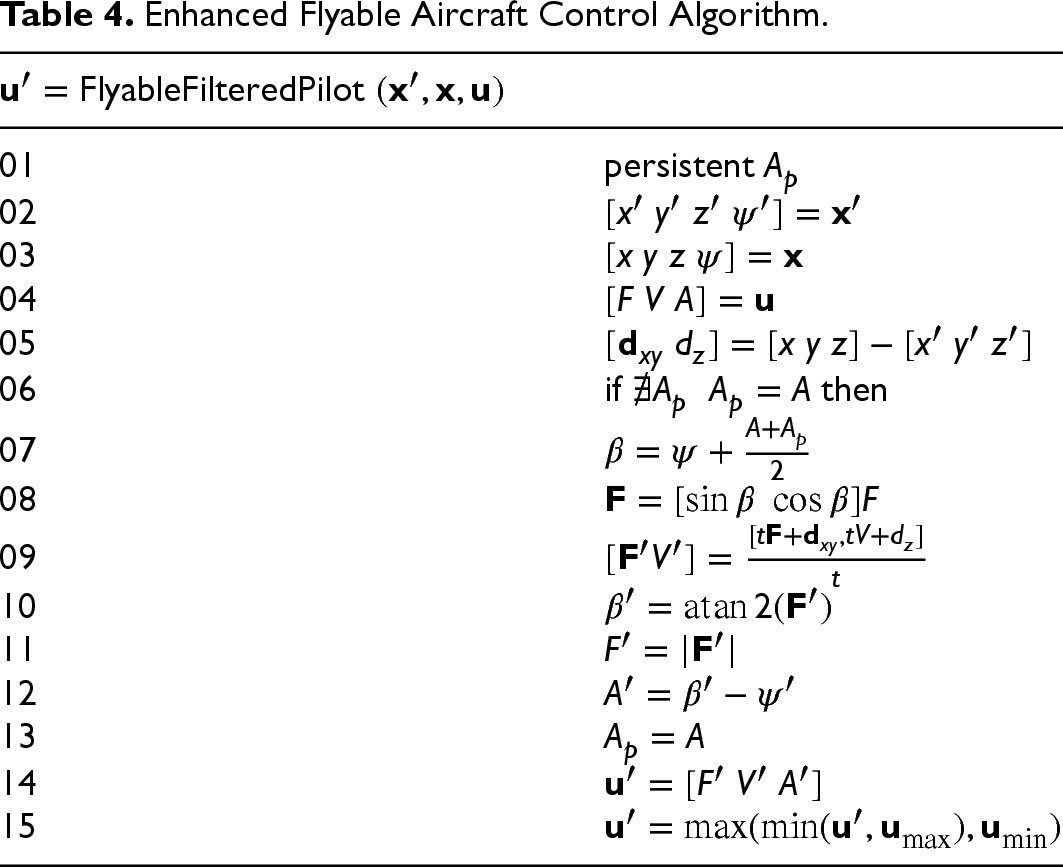
Table 4 shows an enhanced version of the model of pilot behavior presented in Table 3, in which the heading tracking is performed on the average between the last two references provided, in order to filter out those oscillations (07).
Enhanced Flyable Aircraft Control Algorithm.
Enhanced Flyable Aircraft Control Algorithm.
Previous heading data is maintained by means of a persistent variable (01), the value of which is maintained between successive calls to the function. On the first call to the function, this value is initialized to current aircraft heading (06). Subsequently, this value is updated to indicate the previous course for successive function calls (13).
As previously indicated, simulation was employed to validate and assess the performance of our proposed methodologies. In this section, we provide an initial overview of the simulation environment employed, followed by a comprehensive presentation and analysis of the obtained results.
Simulator Description
The simulator (Figure 12) has been developed in MATLAB/Simulink R2022a (The MathWorks Inc., 2025, 2025a), taking advantage of the available continuous and discrete-event simulation resources. It reflects the essential aspects of the approach and landing maneuver of an aircraft to a specific airport runway. The ATC block models the behavior of an air traffic controller who communicates with aircraft. From the information provided by the RADAR, it indicates them when to transit from one waypoint to the next in the descent maneuver, executing the algorithm presented in Table 1. The upper section of the Aircraft simulator is responsible for generating and consuming a discrete event that triggers the lower part, which contains the continuous systems modeling the real and the reference aircraft. The simulator supports the flow of multiple aircraft performing different approach manoeuvers. However, in this work, it is sufficient to analyze the behavior of the aircraft in isolation. At the bottom we can see two areas containing the continuous models of Dubins aircraft and Flyable aircraft. In both cases, Stateflow blocks define their respective behavior by means of state machines.

Main section of the simulator.
Figure 13(a) shows the Dubins pilot state machine, whose purpose is reaching the current fly-by waypoint requested by the ATC. For this purpose, the machine executes two independent super-states in parallel. On the one hand, the COMMUNICATIONS state manages communications with the ATC, updating the target waypoint at the latter’s indication, also, this subsystem updates the information showed in the RADAR screen (Figure 2). Furthermore, the NAVIGATOR subsystem incorporates the state FLYING executing a function fly that implements the behavior defined in Table 2.

Aircraft autopilots.
Figure 13(b) shows the flyable pilot state machine. In this case, the task of the autopilot system is limited to following the Dubins aircraft. To achieve it, the state FLYING executes a function follow that implements both behaviours defined in Table 3 and Table 4. Consequently, the communications subsystem does not interact with the ATC, limiting itself to update the position of the aircraft on the RADAR.
The Dubins aircraft dynamics block is detailed in Figure 14(a). Four continuous integrators (INTpsi, INTx, INTy, INTz) located in the left of the diagram convert the commanded velocities (sent by the autopilot) into variations in position orientation of the aircraft. The discrete retainer has no explicit function. It is used to synchronize all output signals provided by the system. Additionally, the aircraft dynamics block is detailed in Figure 14. The flyable behavior is implemented by means of second-order actuators, which smoothly evolve the actual speeds until they match the commanded speeds. These actuators have been configured to emulate the performance of a category C aircraft.

Aircraft dynamics.
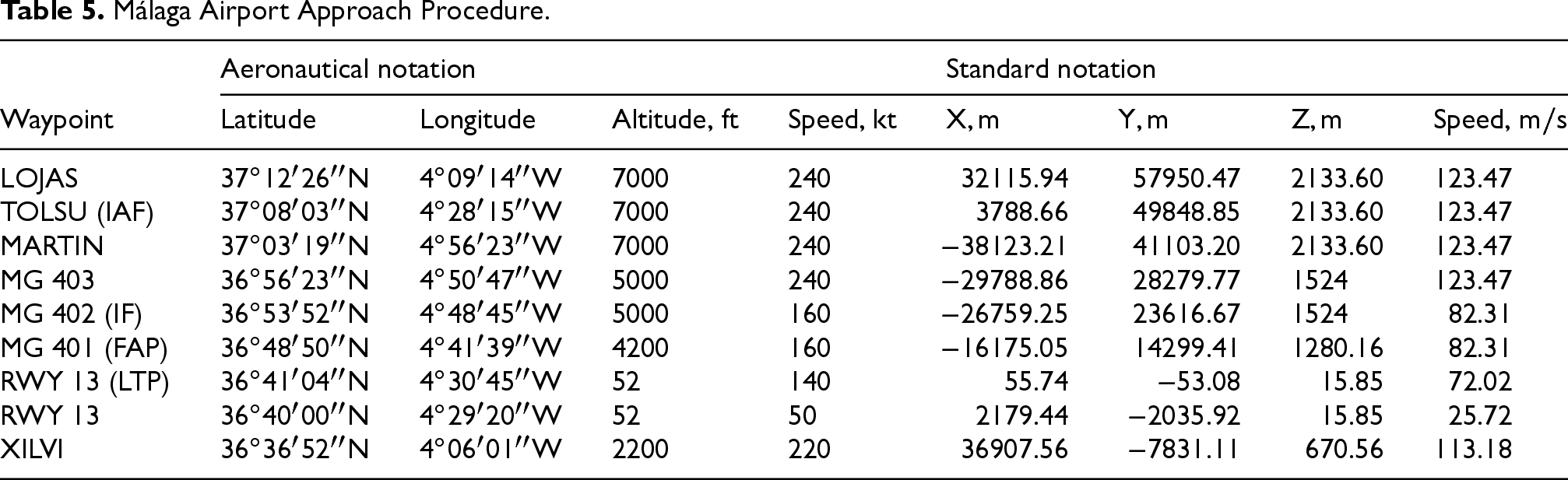
The described simulator can execute any approach maneuver, conveniently defined by a sequence of waypoints. In this work, we have considered the runway “RWY 13” of Malaga airport (Spain), shown in Figure 15 and summarized in Table 5.

Málaga “RWY 13” approach procedure.
Málaga Airport Approach Procedure.

Aircraft approaching maneuver.

Straight-line course correction.

Course correction at MARTIN Waypoint.
Waypoint XILVI is related to missed approach manoeuvers and is not relevant in this work. The blue line shows the sequence of waypoints. The green line represents the runway. According to the procedure (which also contemplates other possibilities), the aircraft (red point) enters the airspace through the LOJAS waypoint, heading for TOLSU. It then heads for MARTIN, where it turns to port and reduces height. At the final approach fix MG401, the last phase of the approach began, reaching the landing threshold point RWY13.
After describing the simulation environment this section presents the obtained results. Firstly, Figure 16 depicts the accuracy of our proposed autopilot systems in tracking a reference aircraft executing the previously described runway approach maneuxer, The figure comprises four plots, with the first three presenting aircraft altitude, heading, and forward speed, respectively. Each plot contains series for both the Dubins reference aircraft trajectory and an application of a Kalman Filter to smoothen the trajectory-an established method documented in the literature (Kalman, 1960). Additionally, two series illustrate the bebavier of our original and enhanced tracking proposals. The last plot contains only 3 series showing the error made by these proposals in the tracking of the Dubins reference. In all cases, the horizontal axis is common and represents time of flight. As outlined in Table 5, initially the reference aircraft maintains an altitude of
Finally, the last plot of Figure 16 illustrates the tracking error exhibited by the flyable aircraft following the reference aircraft. It is observed that the Dubins, aircraft executes a non-flyable manoeuvre, entailing an abrupt transition from straight-line flight to a curved trajectory with a specified radius. In contrast, flyable aircraft must reach this radius of curvature progressively, requiring a few seconds to do so. The consequence is an error of
Figure 17 (above) shows a detail corresponding to a moment when the aircraft is flying in a straight line
The most significant errors occur in steep turns, such as the one performed at MARTIN (at
Conclusions
This paper deals with the use of runway approach procedures based on Dubins trajectories, as well as their
As future work, we propose, firstly, to modify our model to support progressive horizontal speed variation, which will most likely result in a reduction of error committed by this cause in the tracking of the reference. Furthermore, we propose to optimize the approach procedures by replacing the Dubins trajectories (non-flyable) with clothoid trajectories (flyable), which will also contribute to reducing the error committed in the turning manoeuvers.
Footnotes
Funding
This work is supported by R&D projects PID2021-123627OB-C52 and PLEC2023-010348, funded by MCIN/AEI/10.13039/501100011033 and “ERDF A way of making Europe”, and by the Universidad de Castilla—La Mancha under grant 2023-GRIN-34056.
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship and/or publication of this article.
Appendix
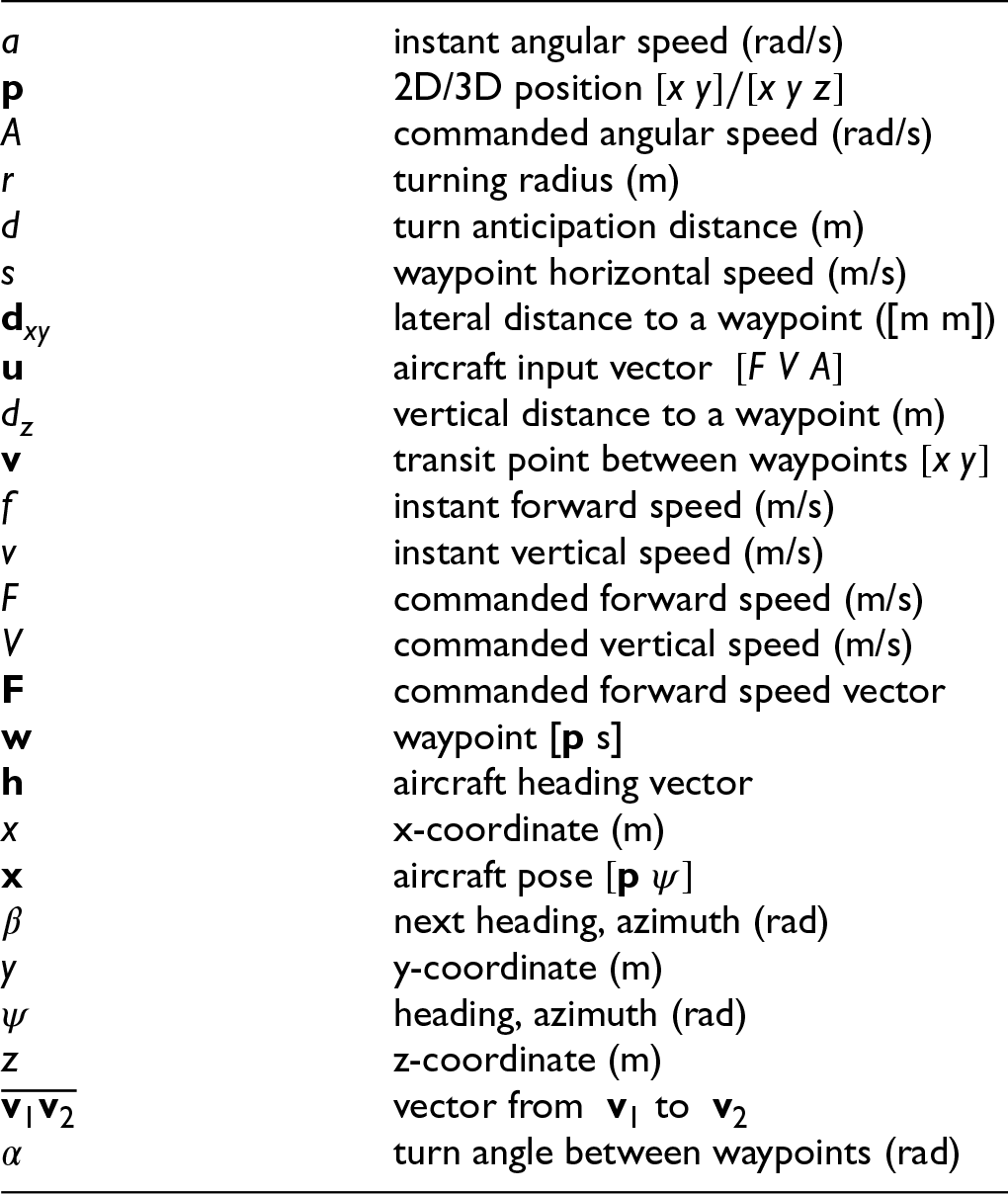
| instant angular speed (rad/s) | |
|
|
|
| commanded angular speed (rad/s) | |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| transit point between waypoints | |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|