
Abstract
Rotor-induced tonal noise is a major source of acoustic discomfort in Advanced Air Mobility (AAM) cabins, particularly under time-varying rotor speeds. Narrowband active noise control (ANC) is effective for mitigating such tonal components; however, its performance strongly depends on accurate and timely tracking of the blade passing frequency (BPF). This study proposes a narrowband ANC system incorporating an innovation-based adaptive Kalman filter (AKF) for real-time BPF estimation. The proposed system combines the AKF with a Momentum Filtered-x Least Mean Square (MFxLMS) controller, enabling robust frequency tracking under dynamic operating conditions through adaptive adjustment of process and measurement noise covariances. The performance of the proposed approach is experimentally evaluated using a two-bladed rotor under two representative operating scenarios: a trapezoidal rotor rotational speed profile with predictable transitions and a stochastic profile with stochastic speed fluctuations. The results show that Kalman filtering significantly improves ANC performance by suppressing reference signal jitter and preventing noise amplification in frequency bands adjacent to the target BPF. Under predictable operating conditions, a conventional Kalman filter with fixed noise covariance matrices performance is comparable to that of the AKF. In contrast, under stochastic and highly dynamic conditions, the AKF demonstrates superior robustness by reducing tracking delay and maintaining phase synchronization, leading to improved ANC stability. These findings indicate that, for rotor-based narrowband ANC, frequency mismatch caused by tracking lag is more detrimental to control stability than mismatch caused by measurement noise, highlighting the importance of estimator responsiveness in dynamic AAM environments.
1. Introduction
As a transformative form of urban transport, Advanced Air Mobility (AAM) is emerging as a solution for three-dimensional urban mobility to address challenges associated with increasing urbanization and population density. However, beyond vehicle performance, the commercial viability of AAM depends on the passenger experience stemming from noise and vibration issues. A primary obstacle in this domain is the severe in-cabin noise generated by rotors, which can cause significant acoustic discomfort and degrade the overall passenger experience, thereby impeding the widespread adoption of AAM. Therefore, this research focuses on reducing rotor-induced cabin noise to enhance passenger comfort and accelerate the deployment of AAM.
To address cabin noise, passive control methods involving sound-absorbing or insulating materials could be considered. However, these methods introduce a substantial weight penalty—a critical limitation for AAM platforms where battery efficiency and payload capacity are paramount for operational viability. This drawback renders passive strategies largely impractical. In contrast, Active Noise Control (ANC) offers a compelling alternative, enabling effective noise reduction without significant weight increases. The core principle of ANC is to generate an anti-noise signal of equal amplitude and opposite phase to the target sound, thereby achieving cancellation through destructive interference. 1 This technology is well-established and has been successfully implemented in applications such as noise-canceling headphones and automotive systems.2,3
According to aeroacoustic theory, the noise from AAM rotors can be broadly classified into two types: broadband noise and rotational noise. 4 Broadband noise stems from stochastic sources like turbulence interacting with the blades. Rotational noise, on the other hand, is tonal and can be further subdivided into thickness noise and loading noise. Thickness noise is caused by the displacement of air as the blades pass, while loading noise results from the net aerodynamic forces acting on the blade surfaces. Of these, loading noise—which includes phenomena like blade-vortex interaction—is often the primary contributor to the annoying tonal components perceived by passengers. Therefore, this study focuses specifically on mitigating this dominant loading noise. The periodic nature of loading noise generates strong tonal peaks at the Blade Passing Frequency (BPF) and its harmonics, which are directly proportional to the rotor’s rotational speed. The distinct tonal character of this noise makes it an ideal candidate for a narrowband ANC strategy. Unlike broadband approaches that process the entire frequency spectrum, narrowband ANC selectively targets these specific BPF peaks, allowing for efficient noise cancellation with substantially lower computational costs.
In the context of rotor noise, previous studies have often employed the Filtered-x Least Mean Square (FxLMS) algorithm for ANC. However, many of these approaches relied on fixed-frequency reference signals or simple tracking methods,5–7 which can suffer from performance degradation under the rapidly varying rotational speeds typical of AAM operations. To address these limitations, various advanced robust ANC algorithms have been proposed in recent years. For instance, the Widely Linear Filtered-x Complex-Valued Mixture Generalized Modified Blake–Zisserman (WL-FxCMGMBZ) algorithm was developed to handle complex-valued signals with robust cost functions, 8 and the Modified Filtered-x Affine-Projection-Like Maximum Correntropy Criteria (MFxAPLMCC) algorithm was introduced to enhance stability against impulsive noise and abrupt path changes. 9
While these methods provide sophisticated mathematical frameworks for improving robustness against non-Gaussian interference, they are often evaluated through numerical simulations or focus on signal-space complexity. To overcome the limitation in practical AAM applications, the key contribution of this work is the introduction of a narrowband ANC system that utilizes an Adaptive Kalman Filter (AKF) for robust BPF tracking under continuous frequency transitions.
The efficacy of such a system is critically dependent on the precise alignment between the algorithm’s target frequency and the actual rotor BPF. Since the BPF is determined by the rotational speed, accurate real-time tracking is essential for effective control, especially under the continuously varying speeds found in realistic AAM operational scenarios. The Kalman filter is an optimal linear estimator for such dynamic prediction problems.
10
Previous studies have investigated the integration of Kalman filters into ANC systems primarily through two approaches: as a direct alternative to the FxLMS algorithm to improve convergence speed, or as a supplementary estimator to enhance the accuracy and robustness of adaptive filter weights.11–13 Distinct from these weight-focused applications, this study introduces an AKF to predict the rotor’s BPF. This approach aims to provide a robust and accurate reference signal for the control algorithm, even with system uncertainties. The feasibility and effectiveness of this narrowband ANC system are experimentally verified by analyzing noise reduction across varying rotational speeds using the FxLMS algorithm. The conceptual diagram of the ANC system for rotor noise employed in this study is illustrated in Figure 1. Concept of active noise control in this study.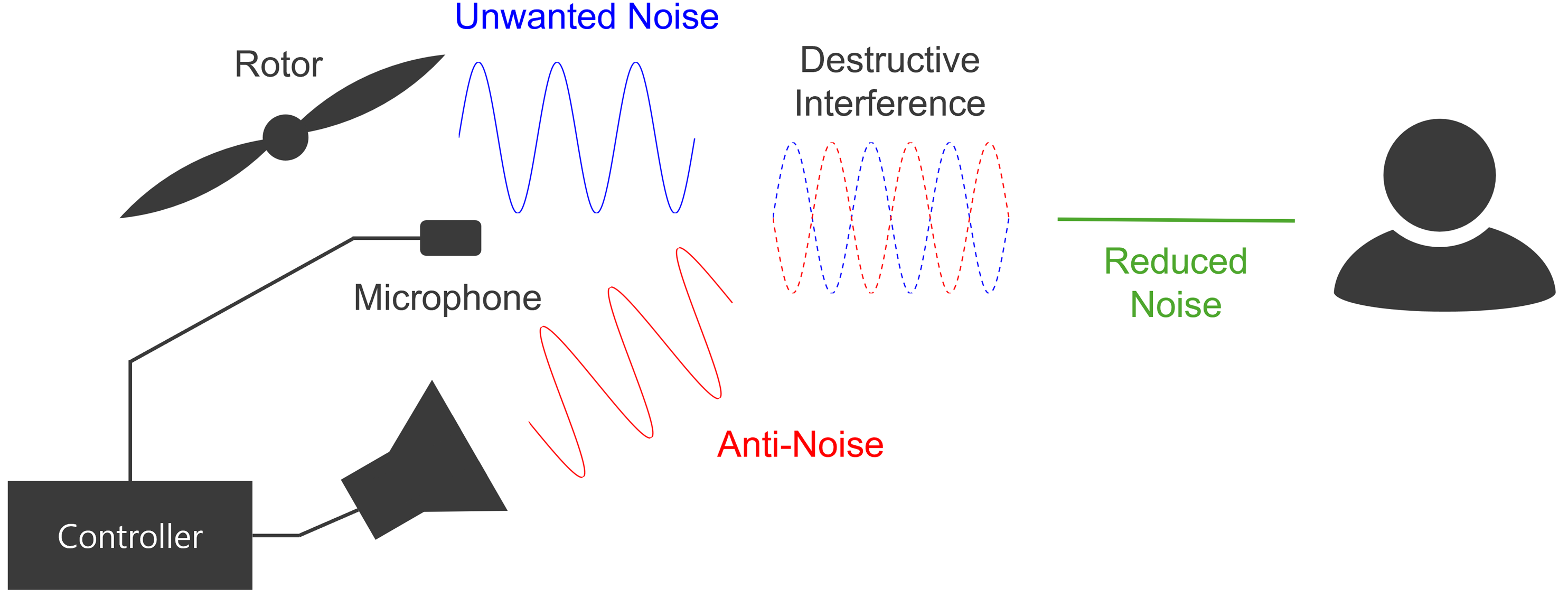
2. Methods
2.1. Narrowband active noise control algorithm
This study utilizes the FxLMS algorithm to attenuate rotor noise.
14
A key feature of this algorithm is its compensation for the secondary path, FxLMS algorithm using adaptive notch filter.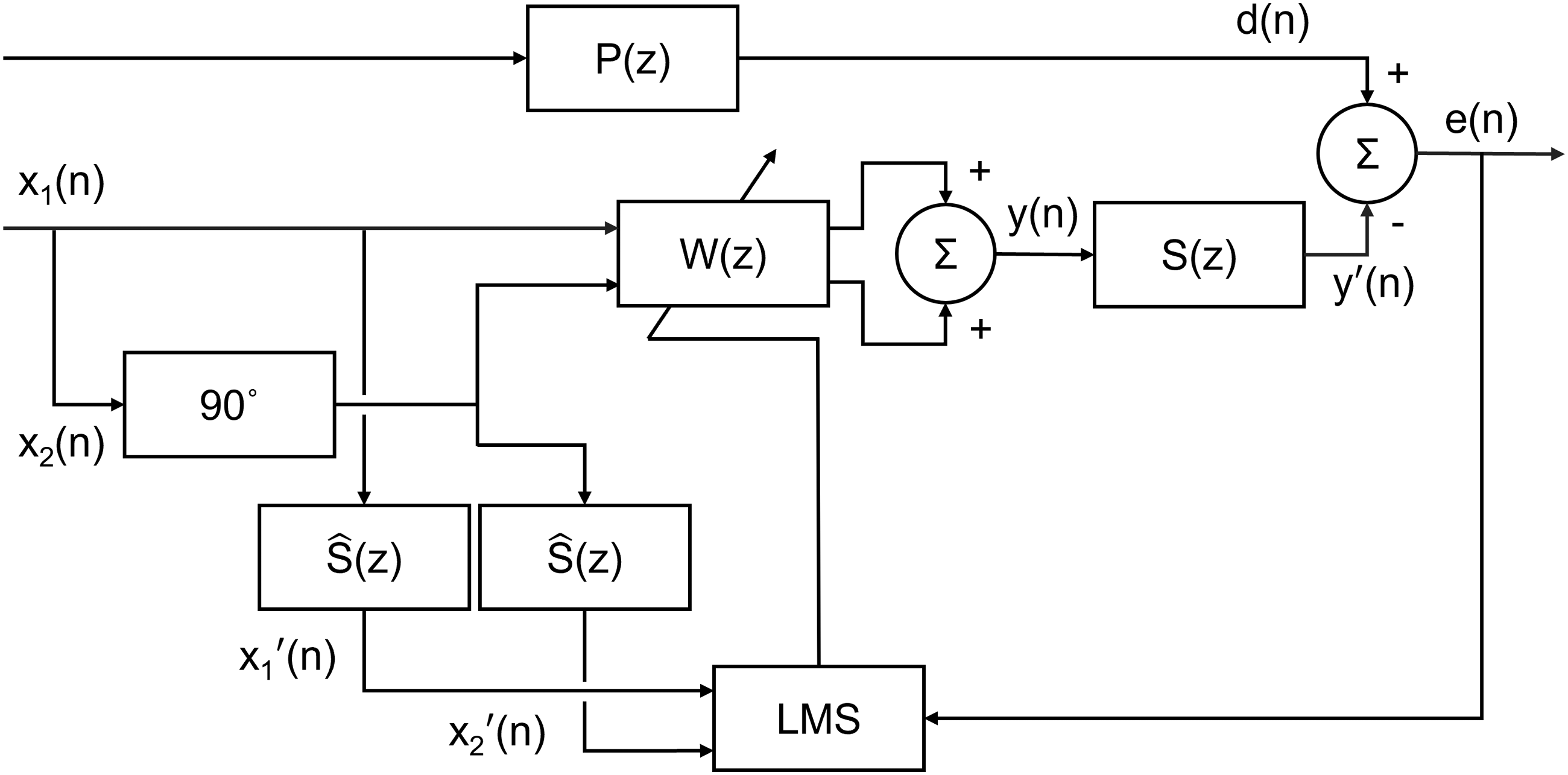
The core of the FxLMS algorithm is an adaptive filter that generates a control signal

This control signal propagates through the physical secondary path

The adaptive algorithm is designed to find the minimum value of the instantaneous squared error

In the standard FxLMS algorithm, the step size parameter

The momentum term introduces an inertial effect that accelerates convergence during consistent trends and suppresses oscillations during rapid fluctuations. The momentum coefficient
2.2. Adaptive Kalman filter for BPF tracking
2.2.1. System dynamics
The Kalman filter is adopted for real-time estimation of the BPF due to its computational efficiency and proven effectiveness in dynamic tracking applications. Although the true system and measurement noises may deviate from strict Gaussian assumptions, the Kalman filter provides a practical and robust framework for online frequency estimation. The system is modeled based on a constant velocity assumption. The state vector consists of two states: the BPF corresponding to the rotor rotational speed


The system dynamics are described by the state equation in Eq. (7), and the measurement equation is given in Eq. (8).


In these equations, the measurement

Unmodeled dynamics such as motor torque fluctuations and aerodynamic disturbances are represented by the process noise term, which primarily affects the rotor acceleration. This modeling assumption corresponds to the Discrete White Noise Acceleration (DWNA) model.
18
While this noise term drives the true system dynamics, it is not included in the filter’s deterministic prediction equation. Instead, its statistical properties are captured by the process noise covariance matrix,

2.2.2. Adaptive adjustment of noise covariances
The process noise covariance
To dynamically adjust

A statistical estimate of the process noise covariance,

This instantaneous estimate is combined with previous estimates to obtain the recursive average, using a forgetting factor

Since the resulting covariance matrix may not conform to the DWNA model structure, a reconciliation process is required to align the statistical estimate with the known system dynamics. In this study, this is achieved by utilizing the (2,2) element of

In contrast,
First, the sensitivity of the BPF to a change in
To address this issue, this study defines a potential BPF change,

To provide a clear procedural understanding of the BPF estimation process, the internal logic of the AKF block is detailed in Figure 3. The algorithm follows a recursive cycle consisting of prediction, innovation calculation, and measurement update. Crucially, the process involves real-time adaptation of the noise covariance matrices to handle frequency fluctuations. Within this cycle, the Flowchart of the proposed AKF algorithm for real-time BPF estimation.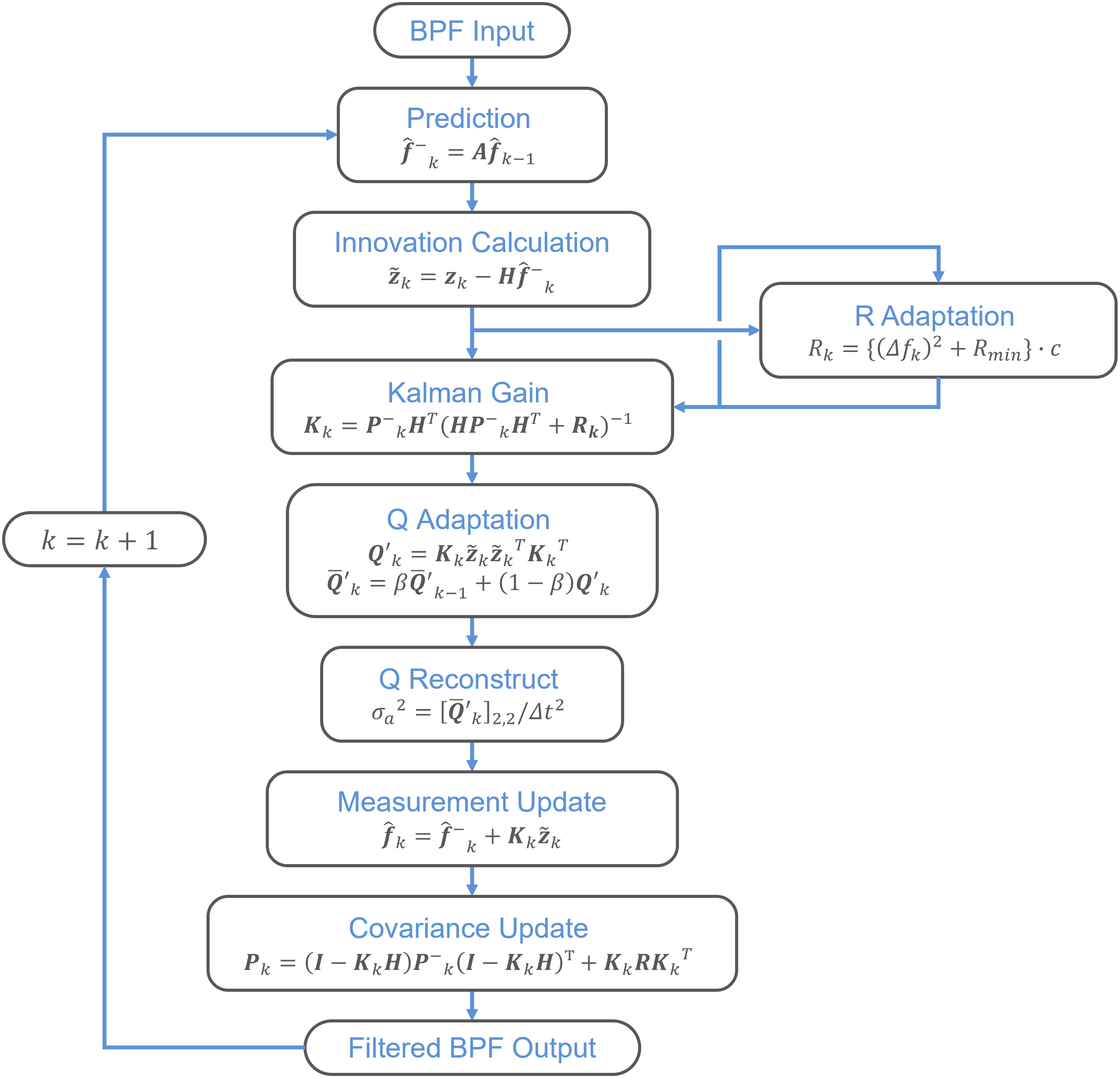
2.3. Overall control scheme
The overall control scheme, which integrates the MFxLMS algorithm and the AKF described earlier, is depicted in Figure 4. The photoelectric sensor generates one pulse for each rotor revolution, and the period between consecutive pulses is converted into an instantaneous BPF measurement. This raw BPF signal is fed into the AKF. The AKF, in turn, rapidly and accurately identifies the true BPF from within the noisy signal and outputs a filtered BPF signal. System diagram of the proposed AKF-based narrowband ANC system.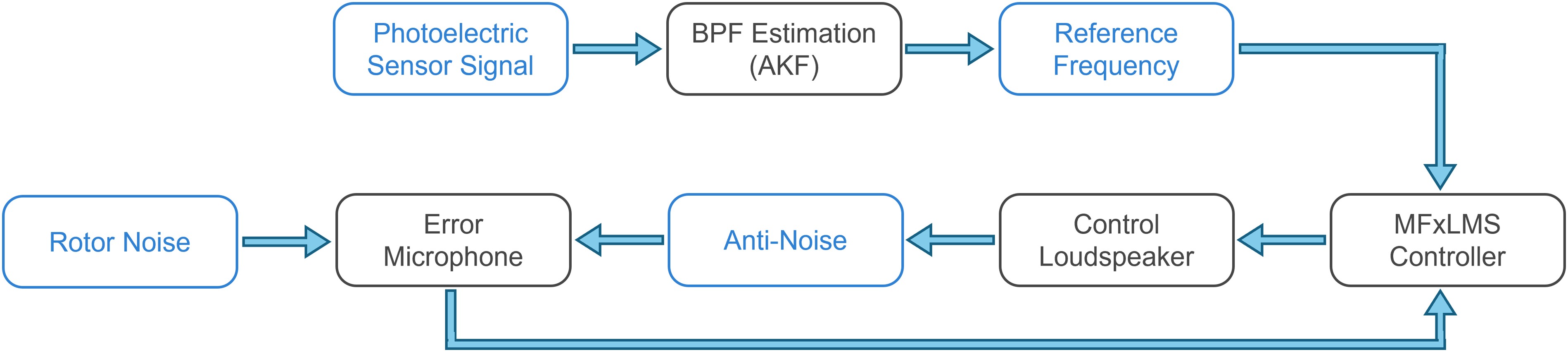
This filtered signal is then supplied to the MFxLMS algorithm as its reference signal frequency. The algorithm uses this frequency to generate its internal reference signals and produces a control signal that minimizes the rotor noise. Finally, this generated control signal is transmitted to the control loudspeaker to produce anti-noise, which destructively interferes with and cancels the rotor noise at the error microphone.
To evaluate the feasibility of the proposed ANC system for real-time AAM applications, a quantitative analysis of its computational complexity was performed. The total computational load per sampling interval is determined by the combination of the AKF for BPF tracking and the MFxLMS for noise control. In this study, the state dimension for the AKF was set to
2.4. Experimental setup
The noise control experiments were conducted in a semi-anechoic chamber. The noise source consists of a 12-inch diameter two-bladed propeller with a 7-inch pitch mounted on a rotor stand. To measure the rotational speed, a strip of reflective tape was affixed to the surface of the motor housing, and a reflective photoelectric sensor was positioned facing it. A MEMS microphone, fitted with a windscreen, was positioned 1.2 m away from the rotor at the same height and oriented to face the rotor directly to measure the noise. The control loudspeaker was positioned 0.6 m from the microphone, with its acoustic output directed perpendicular to the rotor-microphone axis. Detailed hardware models and a schematic diagram of this experimental setup are provided in Figure 5. Photograph of the experimental setup. (a): Data flow diagram. (b): The experimental setup inside the semi-anechoic chamber.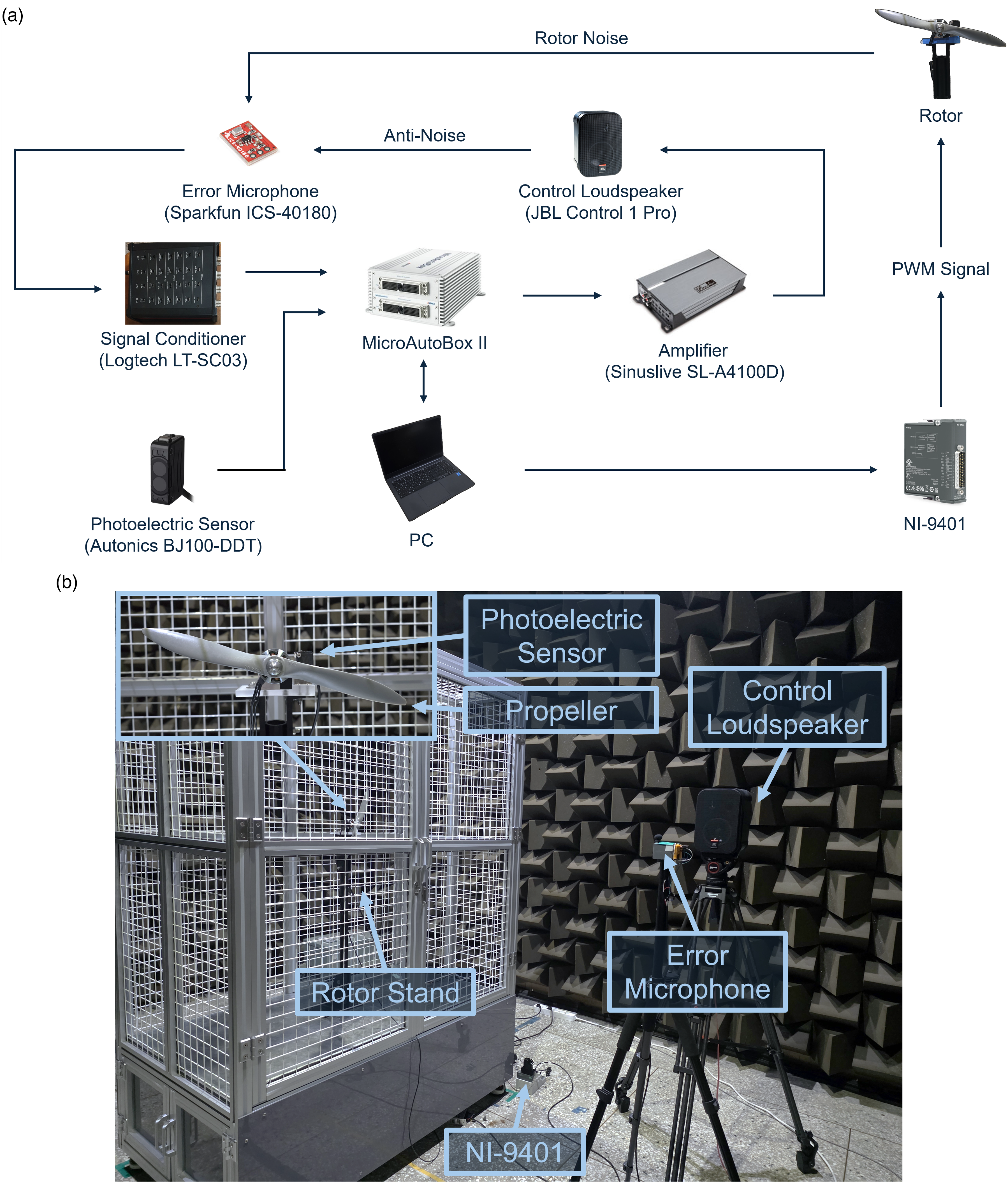
The entire experimental system was managed by a single host PC running two distinct control applications. The motor control was handled by an in-house LabView code, which generates the predefined RPM profiles and sends them as PWM signals to the motor controller via a DAQ module (NI-9401, National Instruments). Separately, the ANC algorithm was implemented in MathWorks Simulink and deployed to the dSPACE MicroAutoBox II for real-time calculation. The analog signal from the error microphone was pre-processed by a signal conditioner with a 1 kHz low-pass filter before being acquired by the dSPACE system. Crucially, the LabView motor-control process and the dSPACE ANC-control process were not synchronized. Its only information about the rotor rotational speed came from the real-time measurements of the photoelectric sensor.
The system was implemented with two different sampling rates: the BPF measurement from the photoelectric sensor and the subsequent AKF estimation were executed at 10 kHz to ensure high temporal resolution for frequency tracking. The signals from the error microphone, along with the main ANC audio processing loop, were executed at 5 kHz. The MicroAutoBox II acquired these signals simultaneously via its ADCs, processed them in real-time, and output the resulting anti-noise signal via a DAC to the power amplifier and control loudspeaker. The error microphone continuously captured the residual noise, feeding it back into the control loop, enabling real-time active noise control.
To evaluate the performance and robustness of the proposed AKF, a comparative study was designed based on a two-factor experimental matrix. The first factor was the filter algorithm used for BPF estimation: (i) no-filter, where the raw BPF measurement was directly used; (ii) a Conventional Kalman filter (CKF) with fixed noise covariance matrices; and (iii) the proposed AKF with adaptive noise covariance adjustment. The second factor was the rotor speed profile. Two 30 s operational scenarios were considered: a trapezoidal profile with acceleration and deceleration phases between approximately 3600 RPM (120 Hz) and 4350 RPM (145 Hz), and a stochastic profile characterized by stochastic speed fluctuations centered around 3900 RPM (130 Hz). Crucially, to establish a fair baseline for comparing the dynamic tracking capabilities of each filter, both the CKF and the proposed AKF were pre-tuned to exhibit similar noise suppression performance during the fixed-speed segments of the trapezoidal profile. Furthermore, the control parameters for the Momentum FxLMS algorithm, specifically the nominal step size
3. Experimental results
3.1. Preliminary validation
Prior to quantitative performance assessment, an experiment was conducted to verify the internal adaptive behavior of the proposed AKF under abrupt rotor speed changes. Specifically, the diagonal elements of the error covariance matrix (
Figure 6 presents the experimental results, illustrating the variations in RPM, the diagonal elements of the error covariance matrix, the elements of the Kalman gain, and the acceleration noise standard deviation of Experimental verification of the adaptive Kalman filter behavior under a sudden RPM step change. (a): measured and the AKF estimated BPF. (b): error covariance 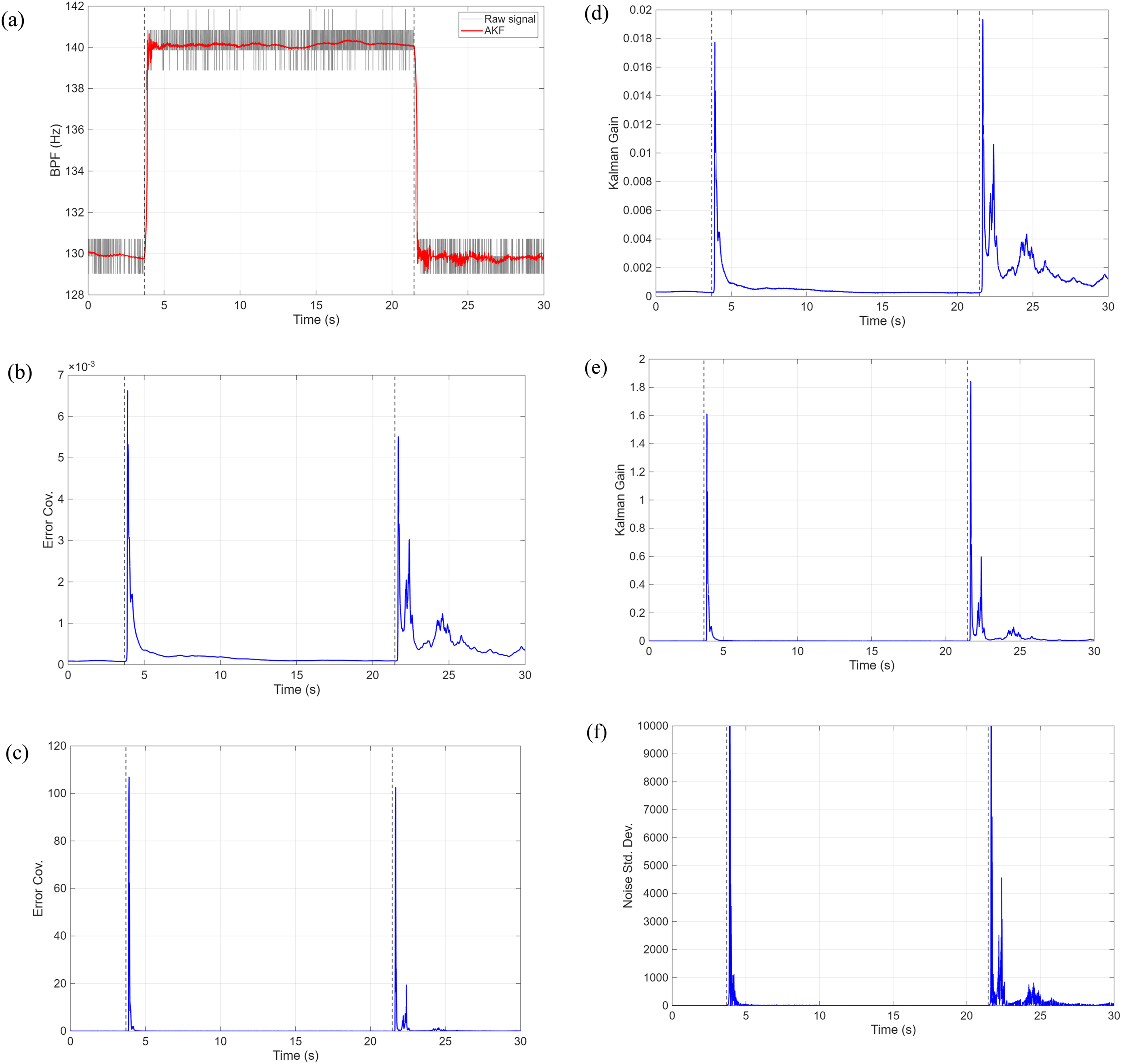
Figure 7 presents the experimental results for the three filter configurations at a fixed rotor speed of 3900 RPM (130 Hz). Specifically, it focuses on the Sound Pressure Level (SPL) frequency spectra to verify the effectiveness and steady-state performance of the proposed control architecture. To ensure steady-state convergence, measurements were recorded after a 30-second stabilization period following rotor startup. Comparison of noise reduction performance at a fixed rotor speed of 3900 RPM (130 Hz).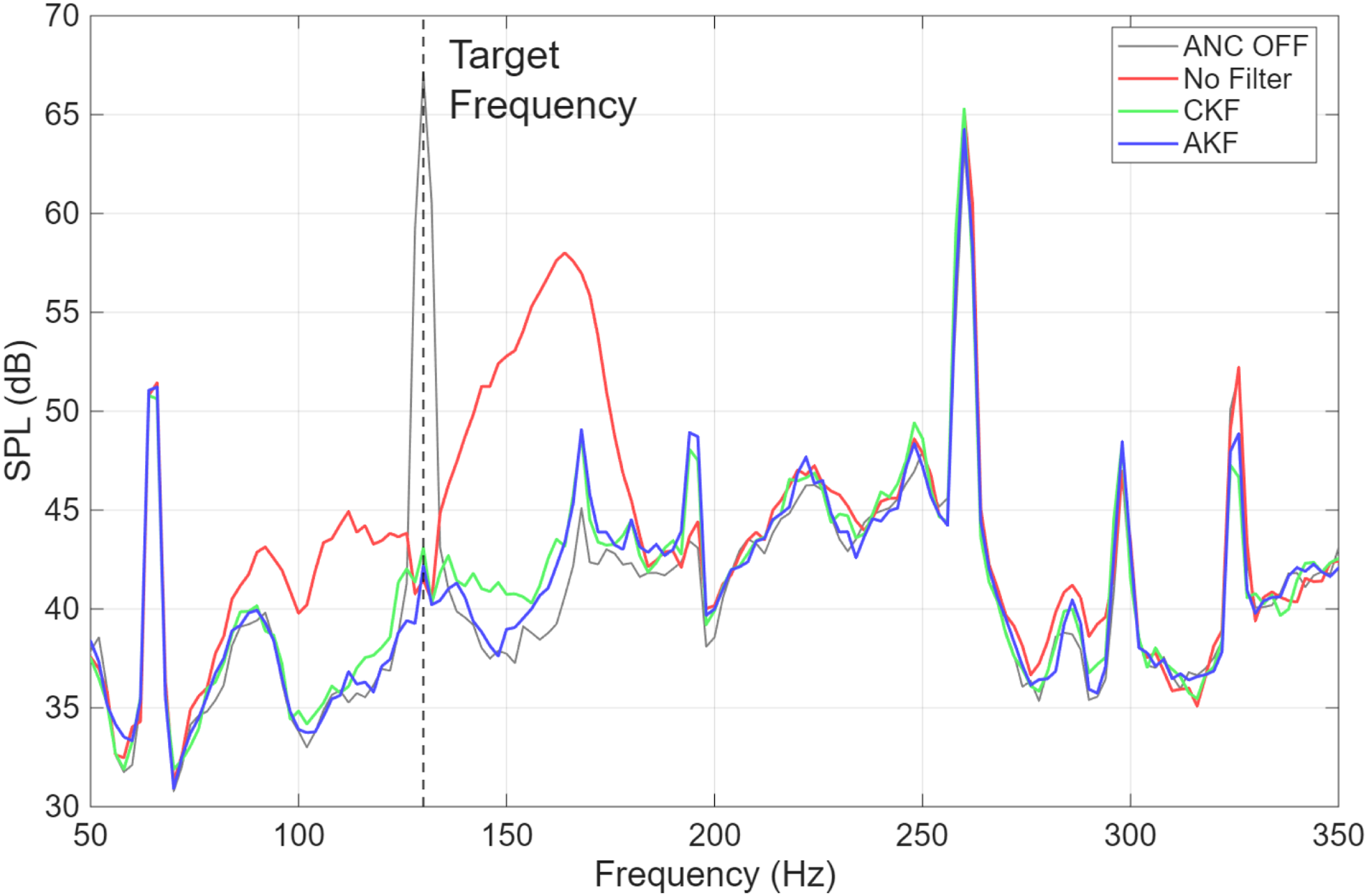
In the No-Filter case, the raw reference signal in the time domain exhibited significant fluctuations due to the quantization noise of the photoelectric sensor. Consequently, in the frequency domain, this signal instability caused spectral broadening around the BPF. Although the primary BPF peak was attenuated, this dispersion led to undesirable noise amplification in the surrounding sidebands, as the controller failed to target a precise frequency. In contrast, the AKF successfully adapted to the stationary RPM condition. By placing high confidence in its internal prediction model, it effectively suppressed nearly all measurement noise, yielding a clean and stable reference signal in the time domain. As a result, the AKF-based system achieved the highest level of noise reduction at the fundamental BPF peak in the frequency spectrum. Under this steady-state condition, the performance difference between the AKF and the CKF is marginal, which is consistent with the expectation that both filters perform similarly when the system dynamics are time-invariant. It should be noted that the MFxLMS algorithm introduces a persistent inertial effect that may cause minor weight oscillations even under steady-state conditions. Accordingly, as the SPL at the 130 Hz target frequency in Figure 7 fluctuates throughout the measurement period, these results are intended to illustrate the relative performance trends among the filtering approaches rather than the absolute maximum achievable noise attenuation of the ANC system.
3.2. Scenario 1: Trapezoidal profile
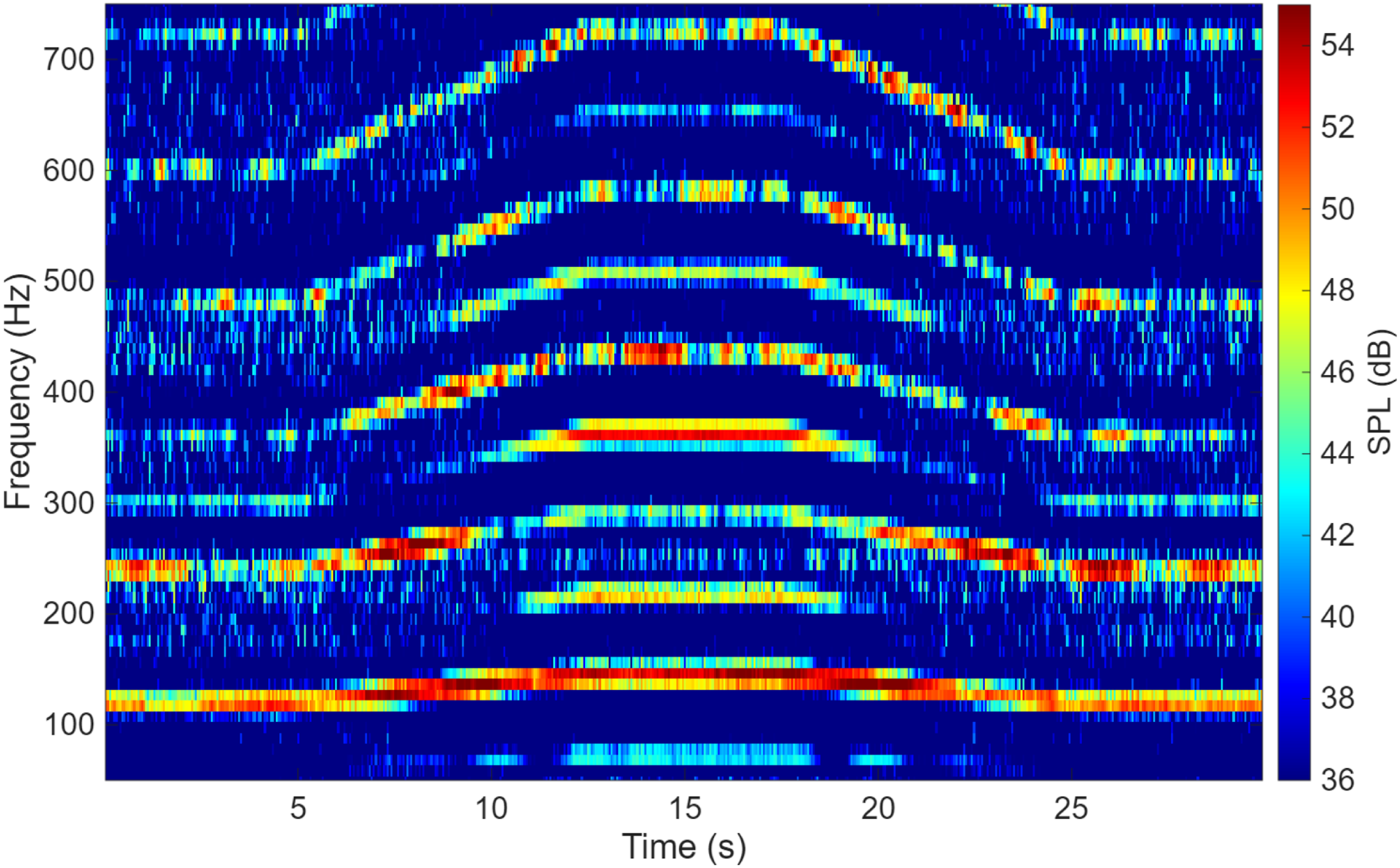
Figure 8 displays the PWM control signal input to the motor to generate the trapezoidal RPM profile, which is designed to simulate standard flight maneuvers such as takeoff, hover, and landing. The profile consists of a sequence of five phases: steady-state, linear acceleration, steady-state, linear deceleration, and a final steady-state phase. To ensure system stability, a 30-second initialization period was observed following rotor startup to allow the ANC system to reach a steady state; noise measurements commenced immediately as the dynamic profile began. The accompanying SPL spectrogram in Figure 9 confirms the presence of a distinct, high-energy tonal peak at the 1st BPF throughout the operation. PWM control signal input to the motor generating the trapezoidal RPM profile. Spectrogram of the primary rotor noise measured during the trapezoidal RPM profile.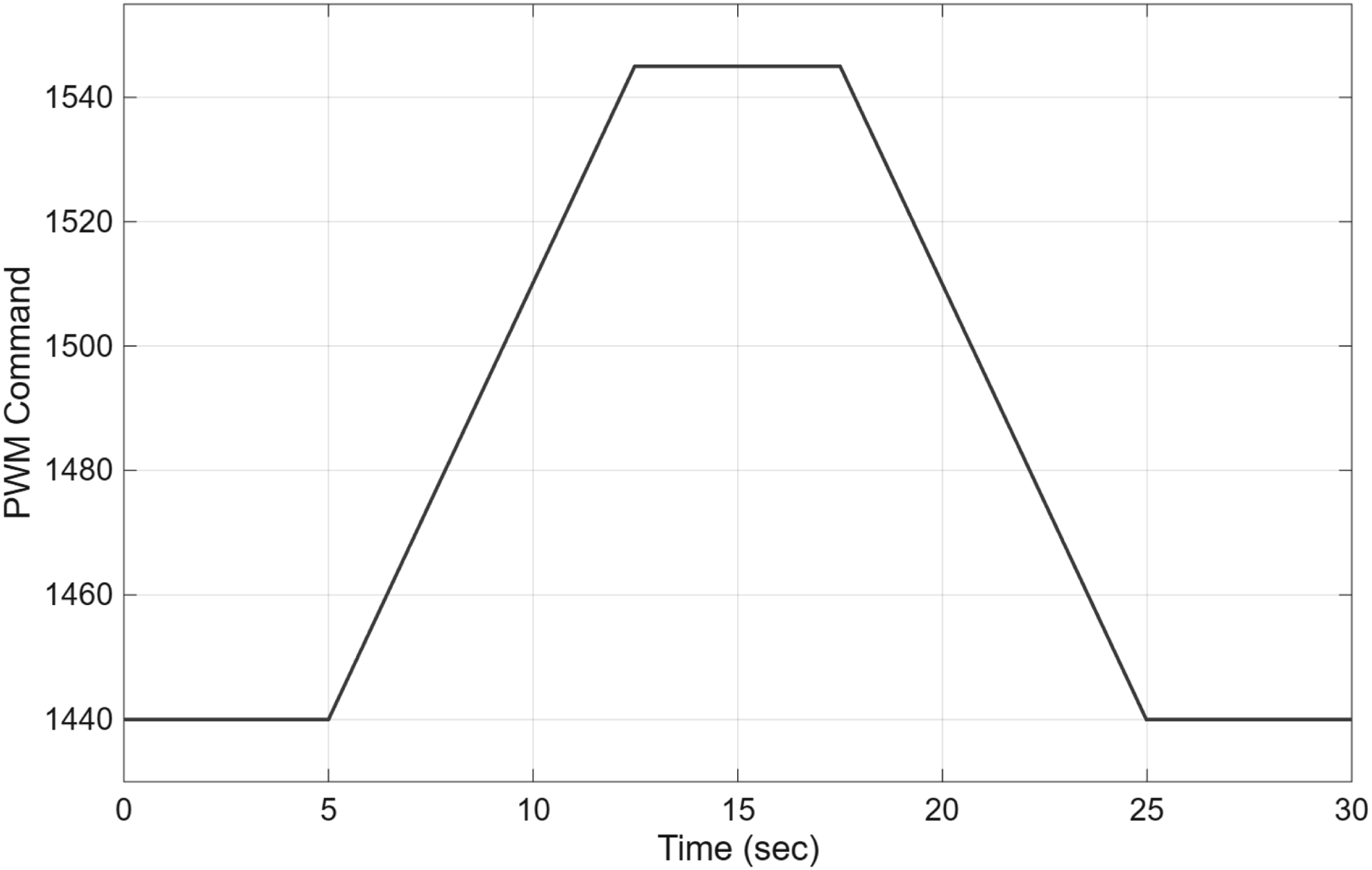
To analyze the impact of filter adaptation on tracking performance, Figure 10 compares the filtered BPF signals from the AKF in two distinct states: a “fully converged filter” state and a “non-converged filter” state. As illustrated in the diagnostic plots of Figure 6, the fully converged filter state is characterized by the stabilization of internal parameters, specifically the adaptive acceleration noise standard deviation Initial transient response (0–8 s) of the AKF in ‘Fully Converged’ versus ‘Non-Converged’ states.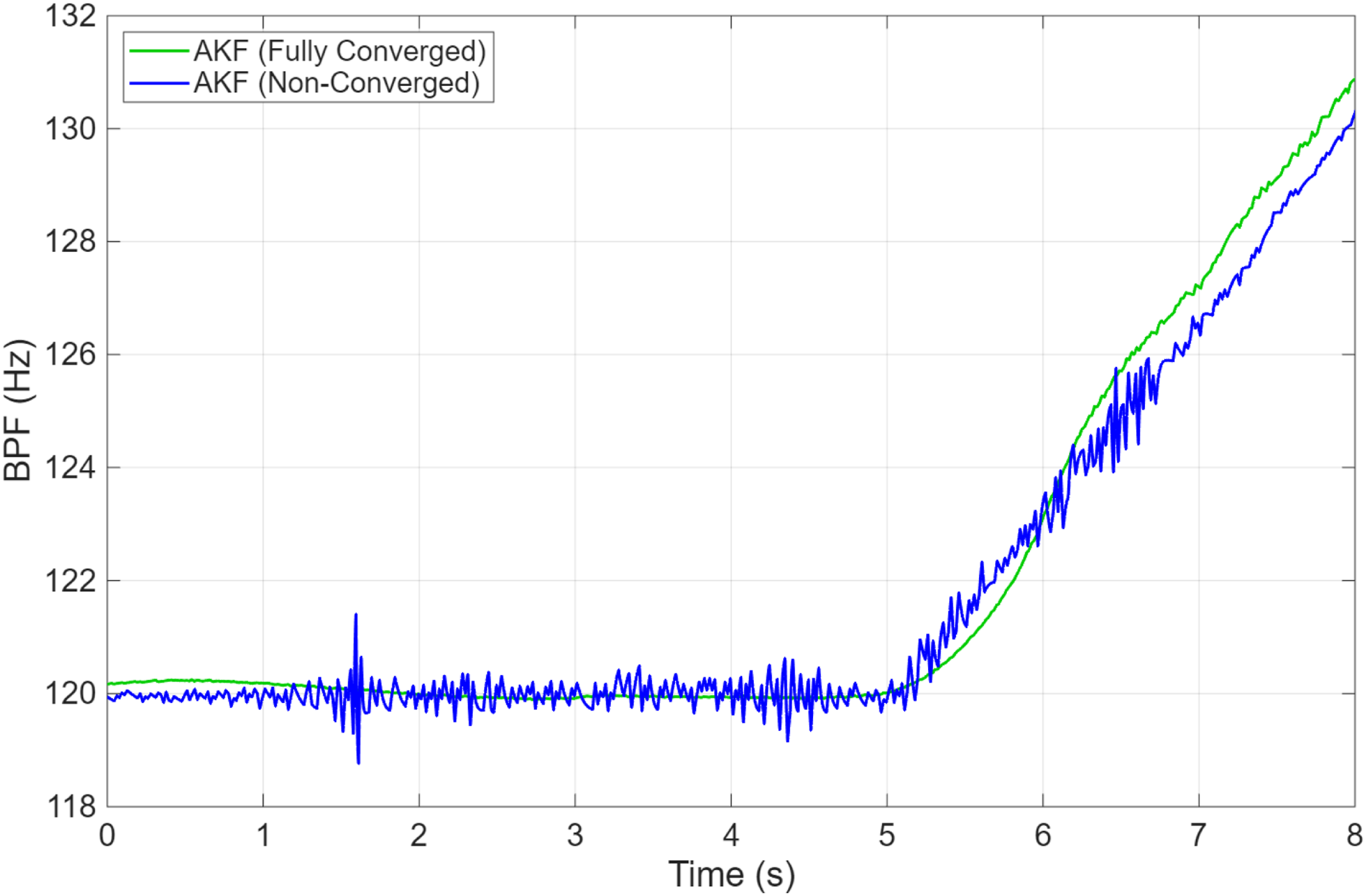
Conversely, in the fully converged filter state, the filter adapts strongly to the dynamic model, minimizing Comparison of BPF tracking performance under the trapezoidal RPM profile.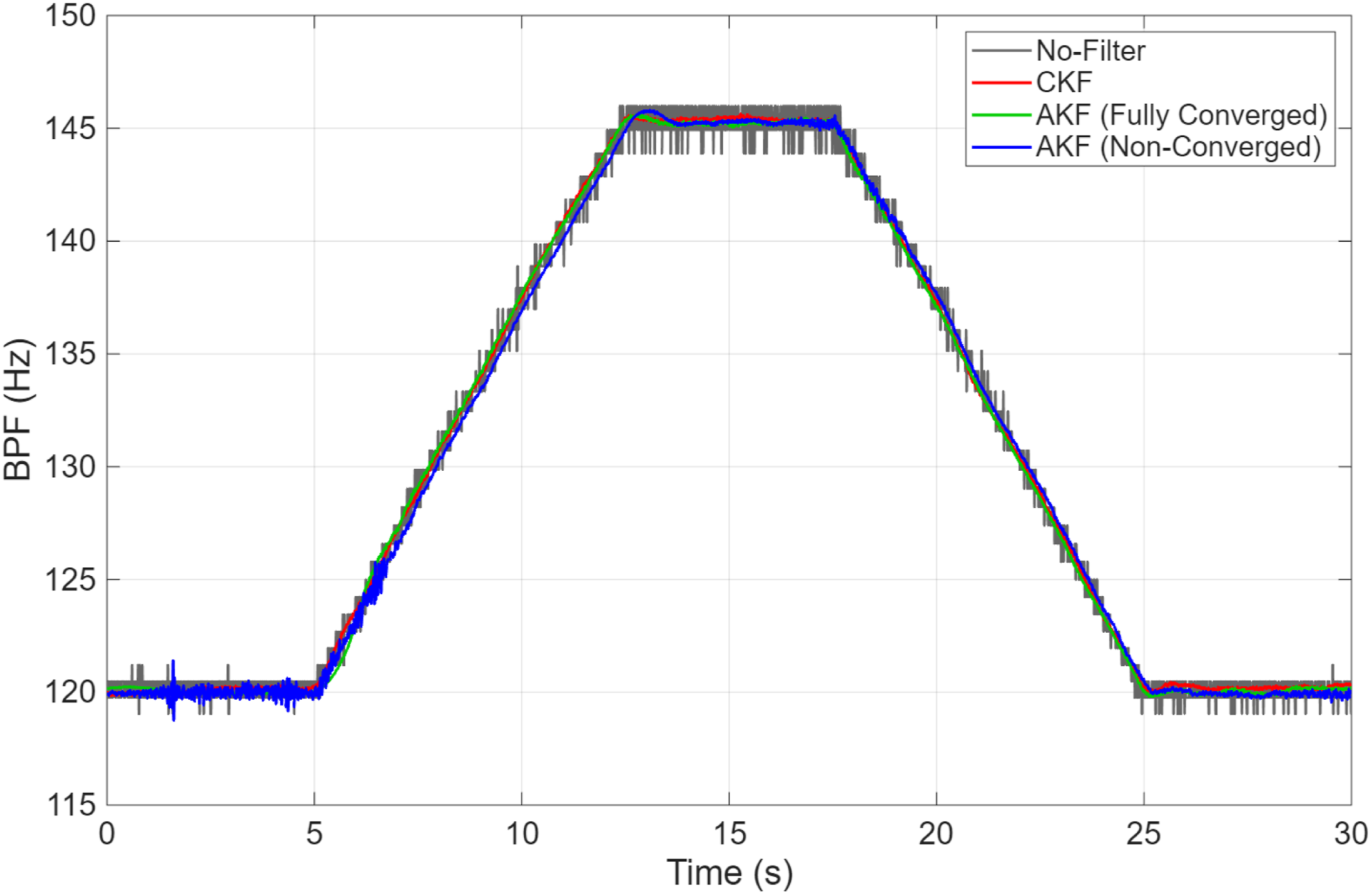
Figure 12 presents the comparative spectrogram results. In the No-Filter case, while the primary peak reduction was achieved, significant spectral broadening caused severe noise amplification in the surrounding sidebands. In contrast, CKF demonstrated highly stable control performance throughout the profile, effectively suppressing sideband amplification. The Non-Converged AKF, although exhibiting slight instability in the fixed-RPM sections due to jitter, maintained overall stability and did not diverge during the RPM transitions. However, the Fully Converged AKF exhibited a critical limitation. While performance was excellent in the initial fixed-RPM section, the ANC system diverged significantly as soon as the RPM began to change. The filter’s sluggish response caused a phase mismatch, and the system recovered convergence only after the RPM had fully stabilized. Comparative spectrograms of the ANC error signal under the trapezoidal RPM profile. (a): No-Filter. (b): CKF. (c): Fully Converged AKF. (d): Non-Converged AKF.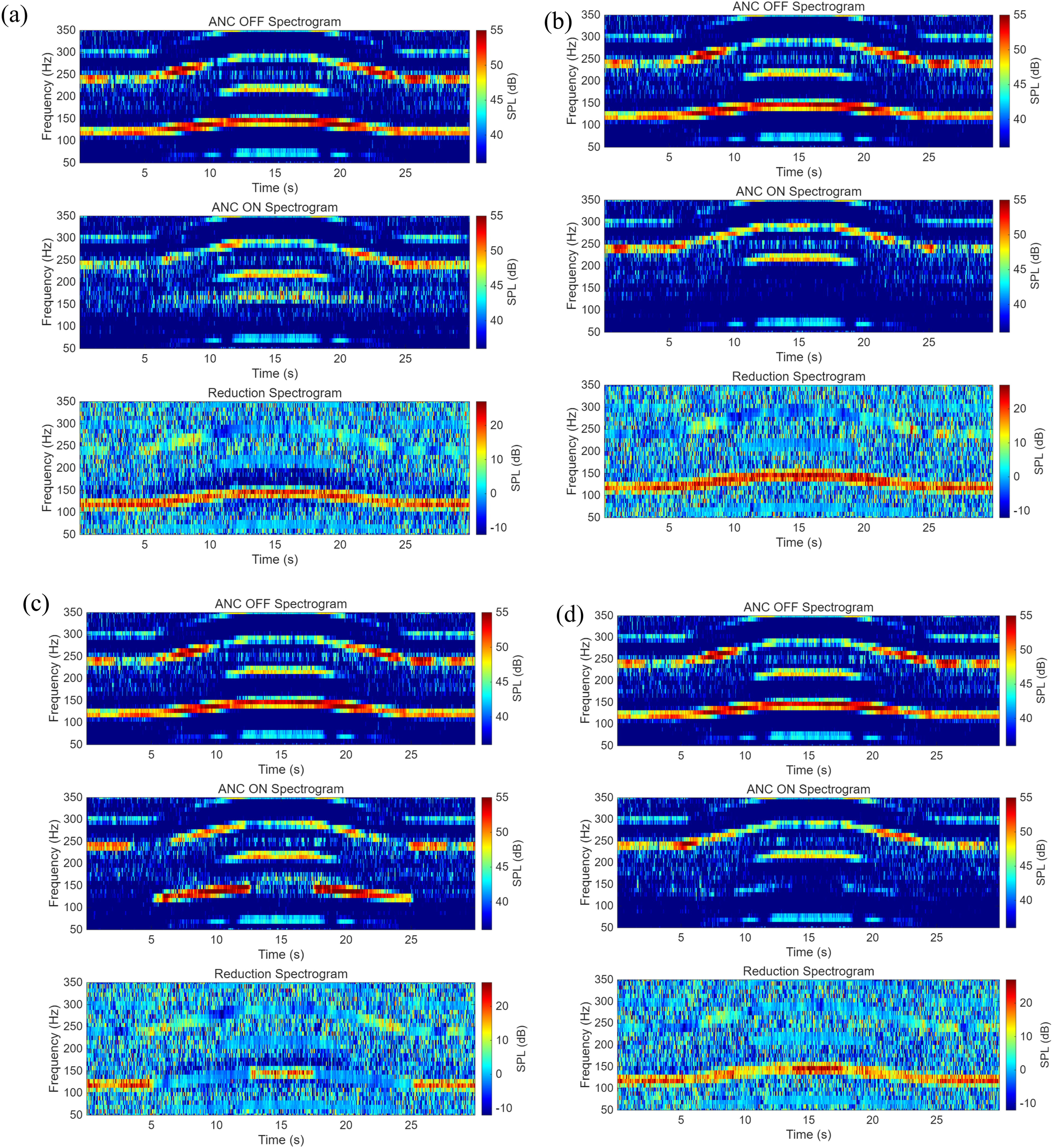
This comparison leads to a significant conclusion: for the overall stability of the ANC algorithm, the ‘non-converged’ state of the AKF was actually more beneficial than the ‘fully converged’ state. The momentary tracking lag induced by the AKF’s over-confidence had a far more detrimental impact on the ANC loop than the jitter present in the non-converged state. Therefore, subsequent analyses in this study focus on the results of the Non-Converged AKF to evaluate its robustness.
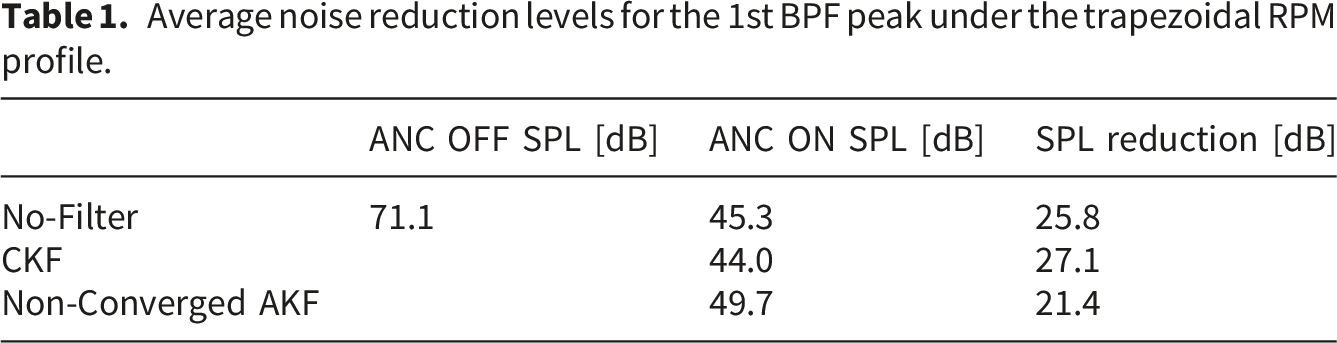
Finally, the control performance was evaluated using order analysis. Figure 13 plots the average SPL of the 1st order peak as it tracks the changing RPM. Both the No-Filter and CKF configurations demonstrated comparable levels of peak reduction. In comparison, the Non-Converged AKF exhibited relatively lower reduction levels; this is attributed to the residual jitter in the reference signal, which prevented perfect phase cancellation. Nevertheless, a comparison between the CKF and AKF results shows that employing a Kalman filter is highly effective in preventing noise amplification in the surrounding sidebands, offering a clear advantage over the No-Filter case. Table 1 provides a summary of the reduction levels of the 1st BPF peak for each configuration. Order analysis results showing the average SPL of the 1st order BPF peak under the trapezoidal RPM profile. (a): No-Filter. (b): CKF. (c): Non-Converged AKF. Average noise reduction levels for the 1st BPF peak under the trapezoidal RPM profile.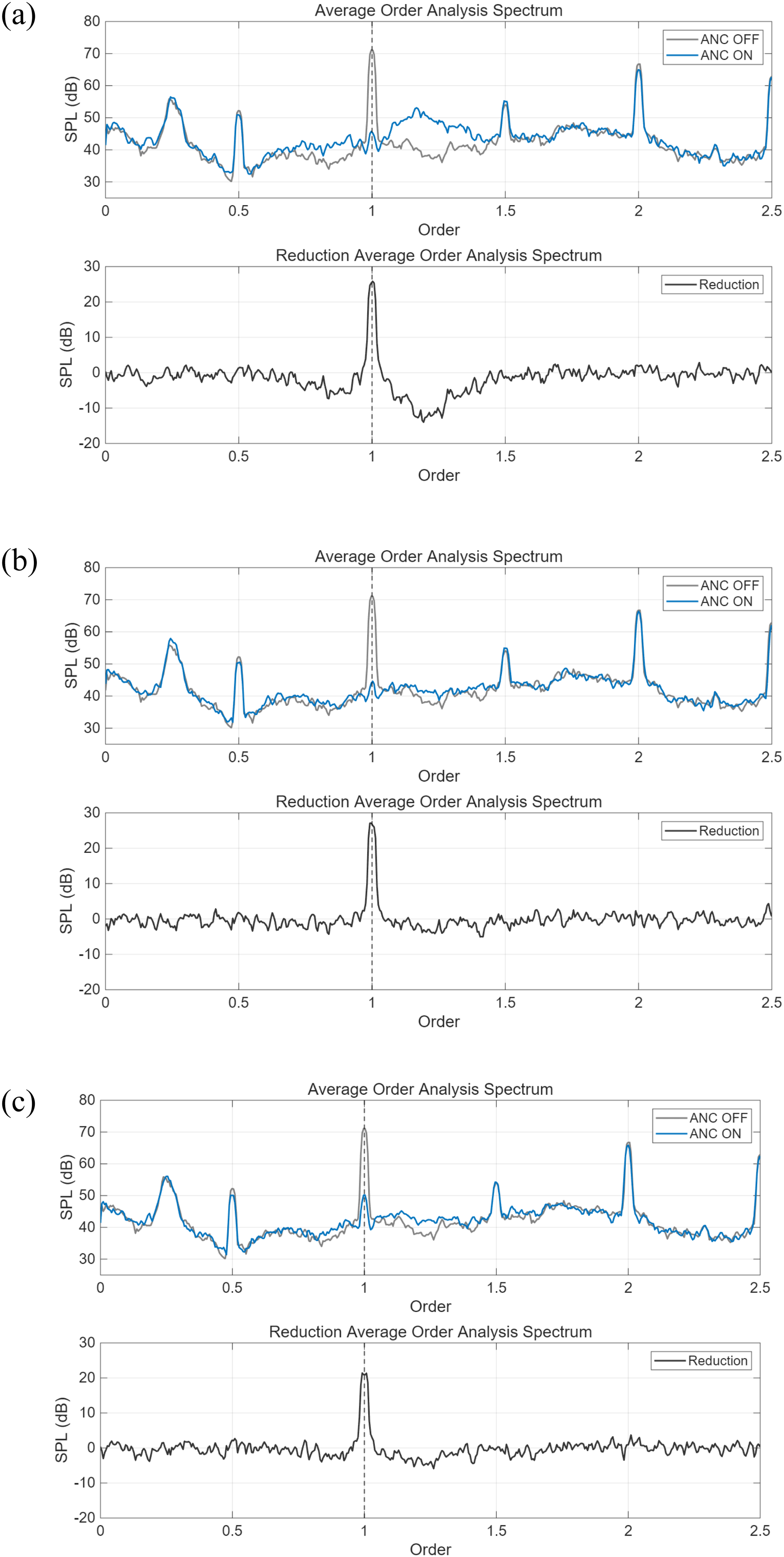
3.3. Scenario 2: Stochastic profile
Figure 14 displays the PWM control signal input to the motor to generate the stochastic profile. This profile includes stochastic fluctuations simulating unpredictable extreme conditions, such as maneuvering against turbulence. To ensure data reliability, noise measurements were initiated after a 10-second stabilization period following rotor startup. In contrast to the 30-second duration used in the trapezoidal profile, this initialization period was intentionally shortened to prevent the AKF from entering a state of “model over-confidence” prior to the onset of dynamic fluctuations. To illustrate the baseline noise characteristics generated by this dynamic profile, Figure 15 presents the spectrogram of the primary rotor noise measured with the ANC system disabled. PWM control signal input to the motor generating the stochastic RPM profile. Spectrogram of the primary rotor noise measured during the stochastic RPM profile.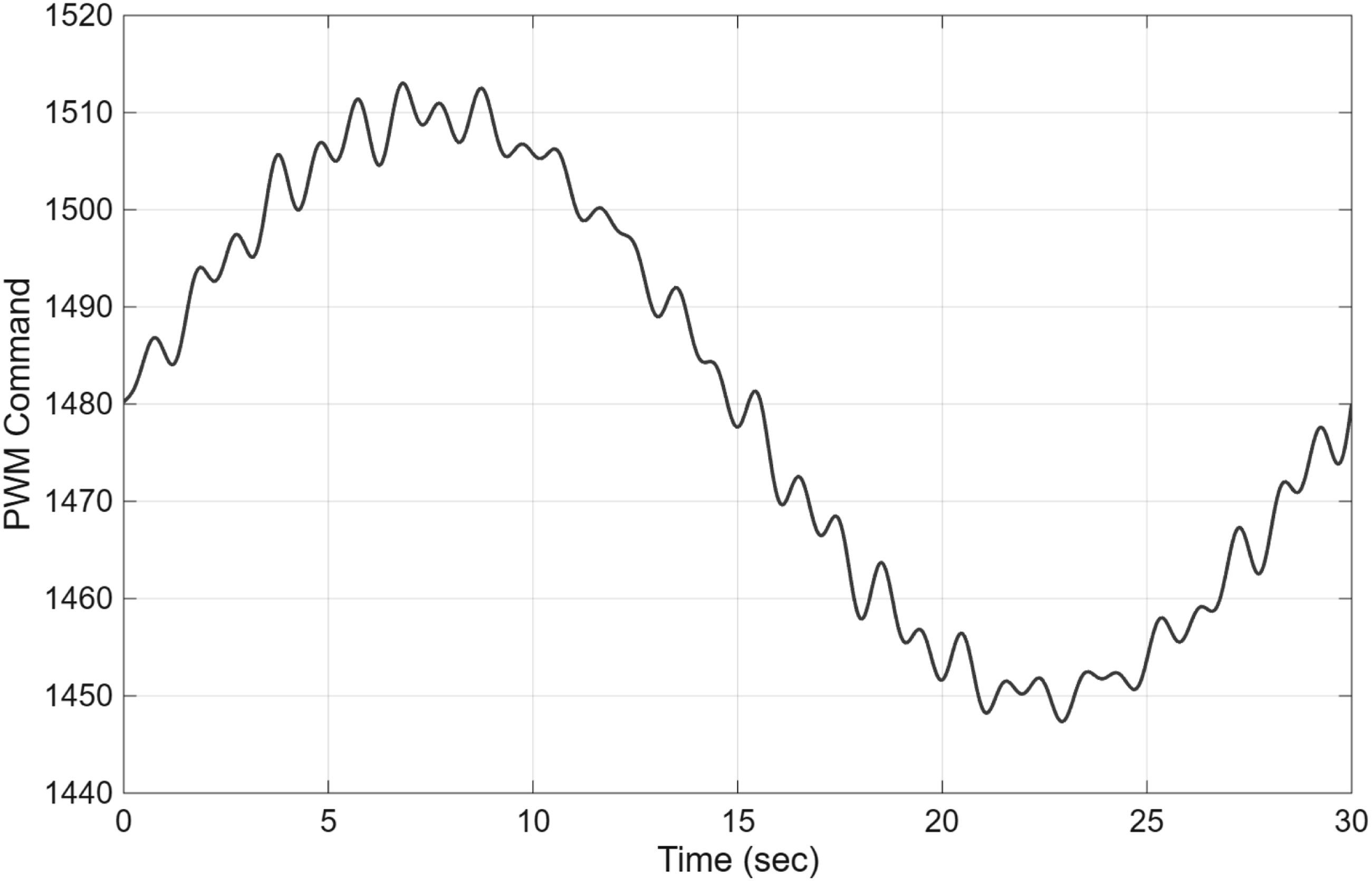
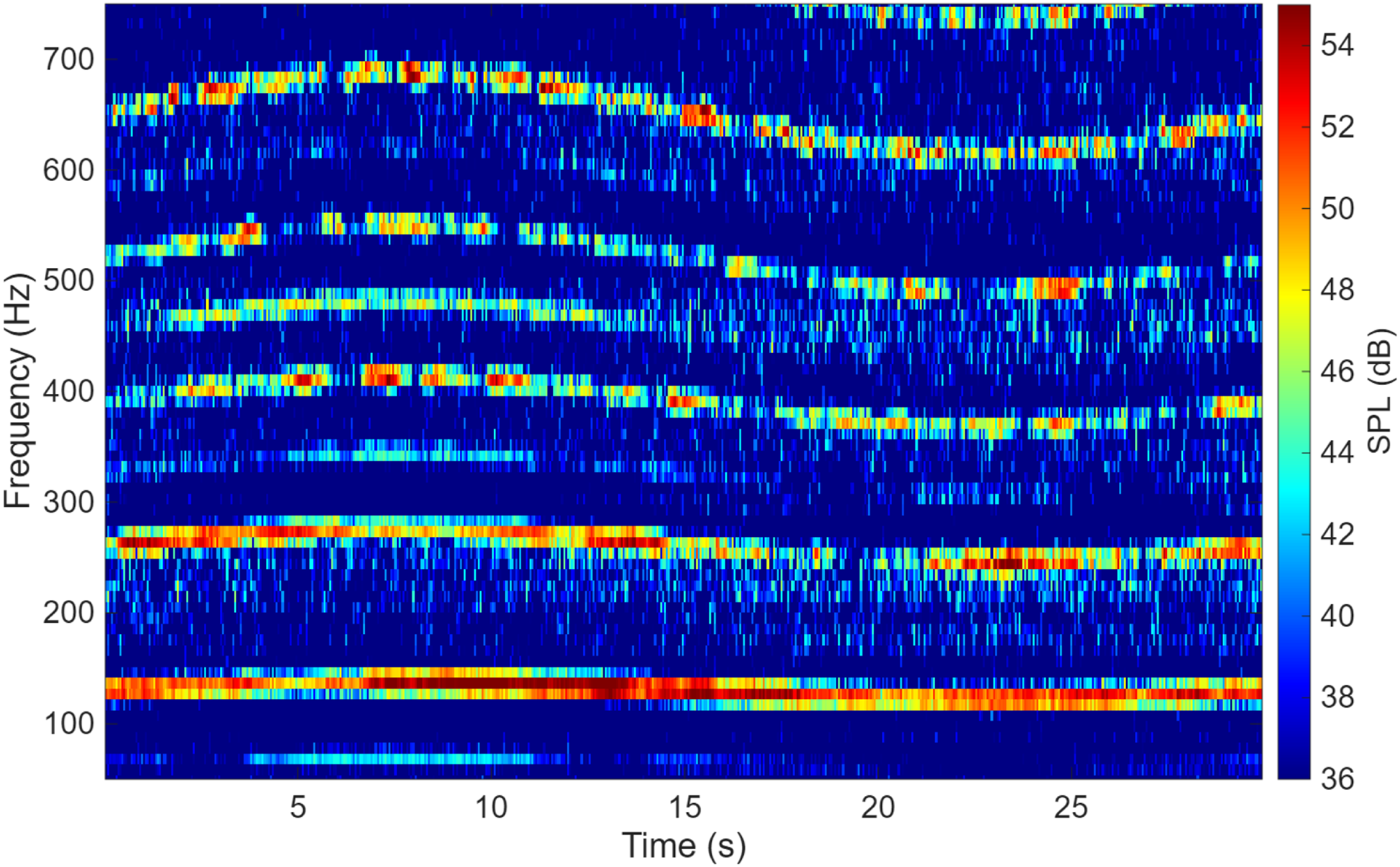
Figure 16 presents the measured raw BPF signal along with the corresponding filtered outputs from the CKF and AKF under this dynamic profile. As observed in the graph, the CKF, constrained by its fixed covariance matrices, interpreted the rapid RPM fluctuations primarily as measurement noise. Consequently, it exhibited a behavior biased towards noise suppression, resulting in a smoothed estimate. However, this prioritization came at the cost of tracking agility, causing a time delay relative to the actual RPM changes. Upon detecting large innovations, the adaptive mechanism increased the process noise covariance, allowing the filter to prioritize tracking agility over noise suppression. As a result, the AKF closely tracked the dynamic profile while removing only minimal noise, effectively maintaining synchronization with the rotor. Comparison of BPF tracking performance under the stochastic RPM profile.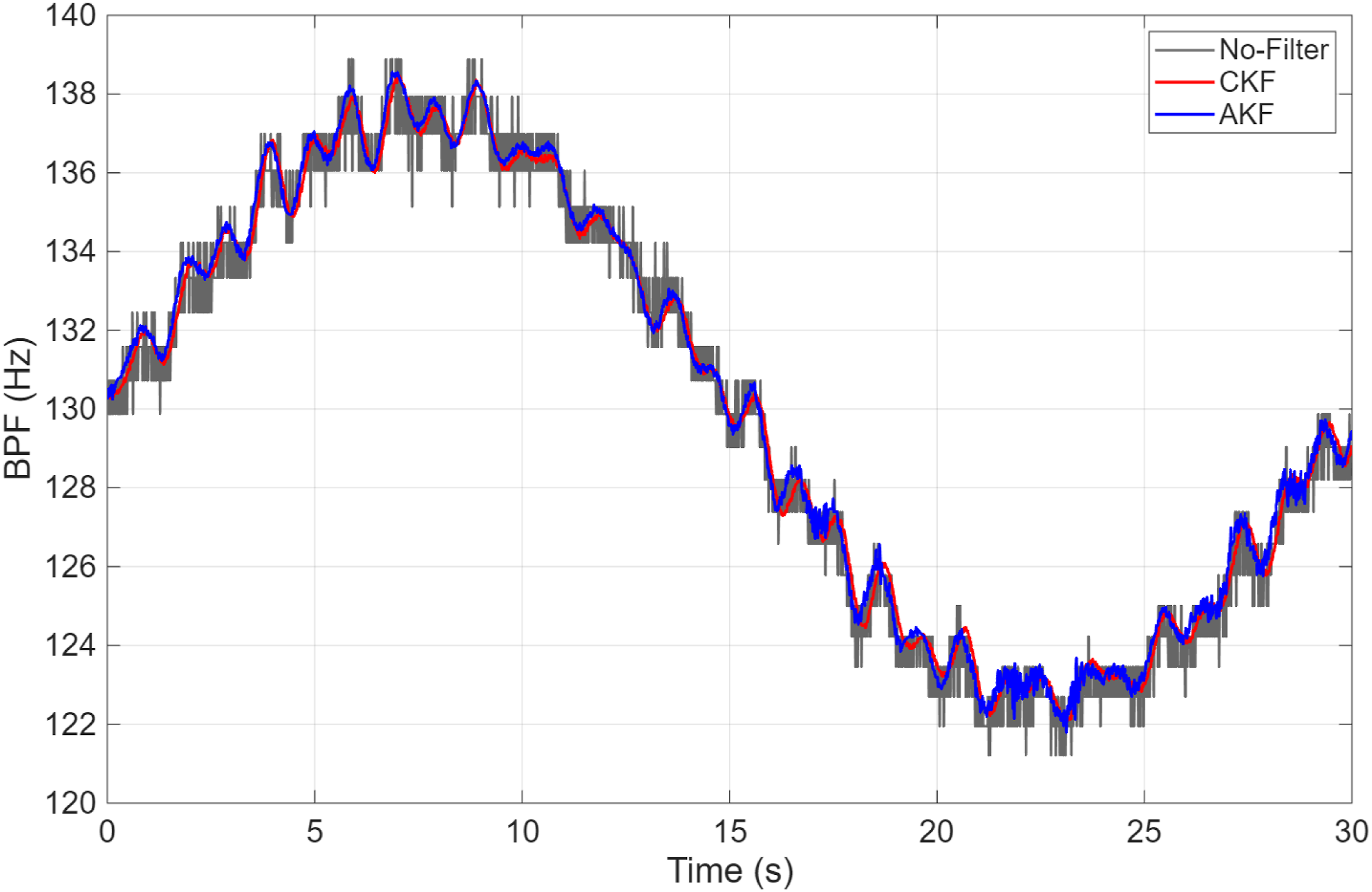
The impact of these tracking characteristics on ANC performance is illustrated in the spectrograms in Figure 17. First, it is noted that the overall ANC performance was degraded compared to the steady-state condition due to the severity of the profile. Furthermore, in certain instances, the control algorithm failed to converge to a minimum and diverged, resulting in observable noise amplification at the BPF. In the No-Filter case, due to the absence of filter-induced delay, the primary BPF component was relatively well-controlled; however, significant noise amplification was observed in the surrounding sidebands. The CKF and AKF cases showed similar spectral patterns. However, repeated experiments revealed that cases of noise amplification due to the algorithm’s failure to find a minimum occurred more frequently with the CKF. This is attributed to the fact that the AKF utilizes a reference signal with a significantly reduced time delay—quantified as approximately 78 ms—compared to the CKF, thereby providing higher system stability during rapid frequency transitions. Comparative spectrograms of the ANC error signal under the stochastic RPM profile. (a): No-Filter. (b): CKF. (c): AKF.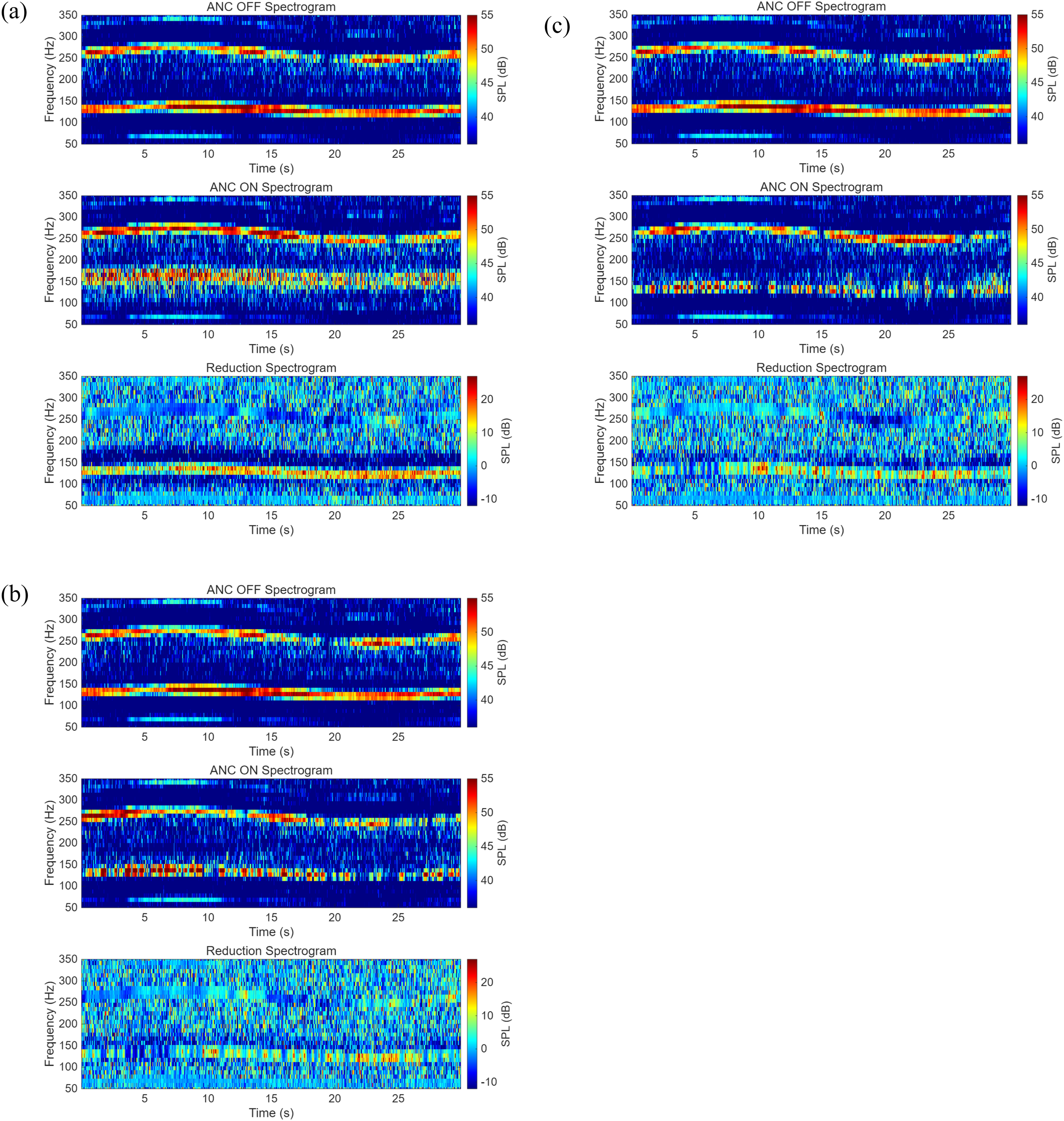
The order analysis spectrum in Figure 18 corroborates these findings. Although the No-Filter case showed the highest peak reduction, it suffered from severe sideband amplification. Both the CKF and AKF effectively suppressed this sideband amplification to similar levels; however, the AKF achieved a slightly higher peak reduction than the CKF. These results confirm that under extreme, unpredictable operating conditions, the AKF is superior due to its robustness. The precise reduction levels of the 1st BPF peak are detailed in Table 2. Order analysis results showing the average SPL of the 1st order BPF peak under the stochastic RPM profile. (a): No-Filter. (b): CKF. (c): AKF. Average noise reduction levels for the 1st BPF peak under the stochastic RPM profile.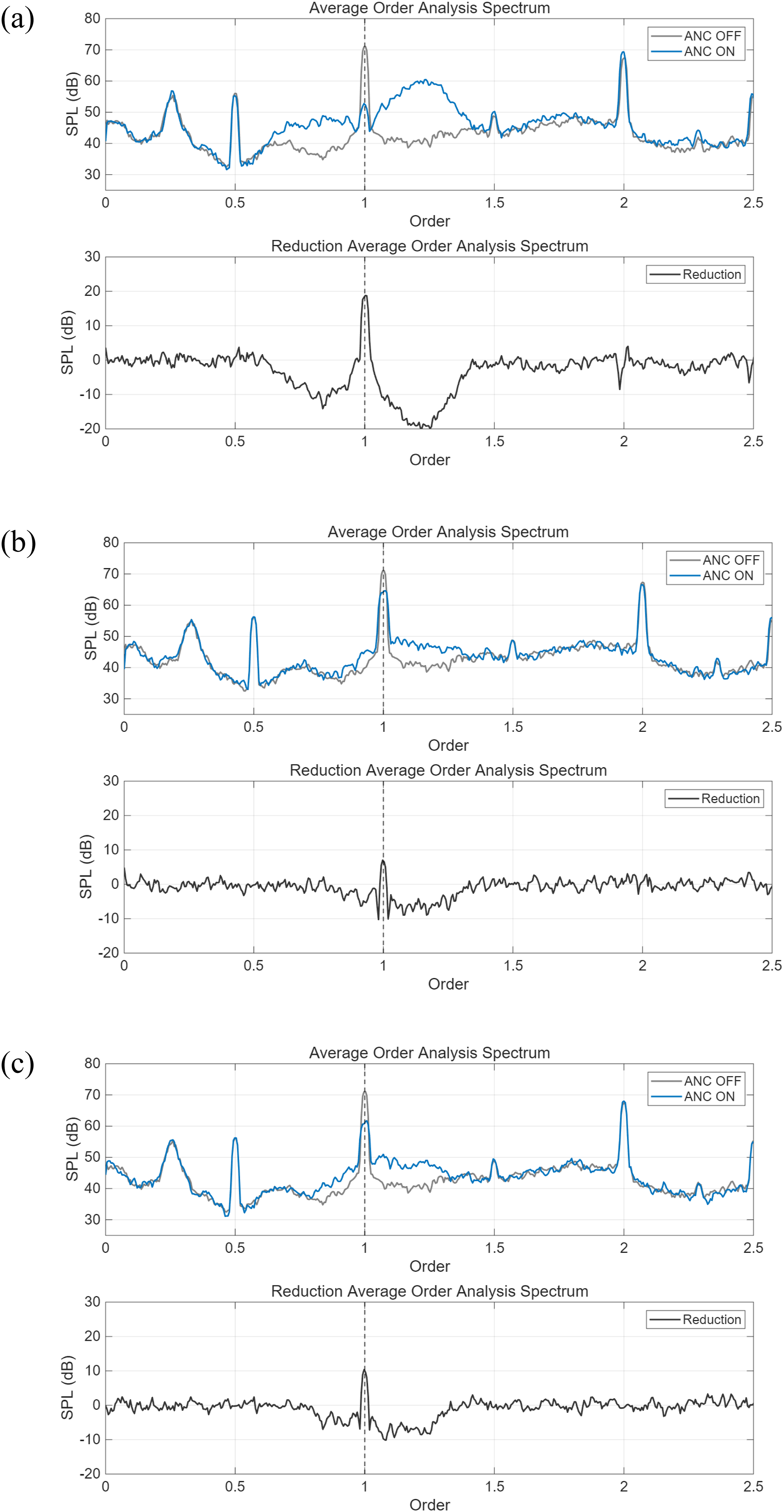

3.4. Discussion
Based on the experimental results from the two dynamic scenarios, this section analyzes the distinct tracking characteristics of the CKF and the AKF and their implications for narrowband ANC performance.
First, the experimental results show the general effectiveness of Kalman filtering in narrowband ANC. Regardless of the specific adaptation mechanism, the introduction of a Kalman filter significantly improved the overall performance of the system, particularly in preventing noise amplification in the frequency bands surrounding the target BPF. By concentrating the spectrally broad raw signal into a precise frequency component, the filter prevented the phase mismatch that typically arises from jitter. Consequently, this accurate frequency tracking mitigated the risk of constructive interference, which would otherwise manifest as sideband amplification.
A counterintuitive phenomenon was observed in the model confidence under predictable conditions. In the case of the trapezoidal profile, the CKF exhibited performance comparable to, or in some cases better than, the AKF. This behavior highlights the phenomenon of “model over-confidence” in the AKF. In fixed-RPM sections, the AKF learns the system model deeply, removing noise almost entirely. However, this high confidence renders the filter sluggish to subsequent changes; it fails to track the initial moment of an RPM transition. Crucially, the experiment revealed that for the ANC algorithm, the difference between a slightly noisy signal and a perfectly smooth signal was negligible. However, the momentary tracking lag caused by the AKF’s slow reaction had a detrimental effect. Since the RPM continued to change while the ANC was unstable, the system could not locate the optimal minimum until the RPM stabilized. This explains why the “non-converged” AKF, with its higher uncertainty and faster reaction time, yielded better ANC convergence than the “fully converged” AKF.
Under stochastic conditions, the advantages of the AKF became evident. In the stochastic profile, the fixed-gain CKF effectively acted as a low-pass filter, interpreting rapid RPM variations as measurement noise. This resulted in a phase lag, which made stable convergence of the ANC system difficult. The AKF, on the other hand, responds to large innovations by dynamically increasing the process noise covariance, thereby prioritizing tracking agility over noise suppression. Synthesizing these findings, a critical insight for rotor narrowband ANC design is derived: frequency mismatch caused by tracking lag is significantly more detrimental to ANC stability than frequency mismatch caused by sensor measurement noise. This observation is particularly relevant to practical AAM operations, where multi-rotor configurations are commonly employed and rapid, uncoordinated RPM variations frequently occur during hovering, maneuvering, and transition flight. Under such conditions, the rotational speed of each rotor can change abruptly in response to flight control commands and aerodynamic interactions, making rapid frequency tracking essential for stable ANC operation. Consequently, for AAM applications subject to inherent unsteadiness, an estimator that prioritizes responsiveness over aggressive noise smoothing is required. However, it should be noted that in operating environments where the likelihood of extreme dynamic conditions is low, the proposed AKF may become overly confident in steady states, potentially degrading tracking performance during mild transitions.
4. Conclusion
This study addressed the mitigation of tonal noise generated by rotors in Advanced Air Mobility (AAM) cabins using a narrowband Active Noise Control (ANC) system. The primary objective was to develop a robust control algorithm capable of handling rotors subject to time-varying rotational speeds in realistic operational environments. To achieve this, the applicability of a control system using an Adaptive Kalman Filter (AKF) on photoelectric sensor BPF signals was examined. The proposed system combines the AKF-based frequency estimator with a Momentum Filtered-x Least Mean Square (MFxLMS) algorithm to enhance tracking robustness under dynamic conditions.
The performance of the proposed system was evaluated through ANC experiments under two distinct RPM profiles. The main findings can be summarized as follows:
First, the effectiveness of Kalman filtering for narrowband ANC was demonstrated. Regardless of the adaptation mechanism, the application of a Kalman filter effectively suppressed noise in the BPF signal. Furthermore, it significantly improved overall ANC performance by preventing the noise amplification phenomenon in the frequency bands surrounding the target control frequency.
Second, under predictable operating conditions represented by the trapezoidal RPM profile, the Conventional Kalman filter (CKF) exhibited performance comparable to, and in some cases slightly better than, the AKF. This was attributed to the AKF’s tendency for “model over-confidence” in steady states, resulting in a sluggish response at the onset of RPM changes.
Third, under unpredictable operating conditions, represented by the stochastic profile, the AKF showed clear advantages. While the CKF suffered from relative phase lag due to its fixed low-pass characteristics, the AKF maintained synchronization by prioritizing tracking agility over noise smoothing through adaptive covariance adjustment.
These results imply that for the convergence stability of rotor narrowband ANC, frequency mismatch caused by dynamic tracking lag has a more detrimental effect than frequency mismatch caused by sensor noise. While the AKF excels in extreme environments, it was observed that the standard Kalman filter may be sufficient for general operating scenarios with limited dynamic variability.
Future work will focus on further improving the transient convergence behavior of the ANC algorithm itself to better cope with rapid rotational speed changes. Also, the proposed system will be integrated into a small-scale aircraft for in-flight testing to evaluate its performance under realistic aerodynamic loads and structural vibration environments.
Footnotes
Acknowledgements
This work was supported by BK21 FOUR Program by Chungnam National University Research Grant (2024), and the Global-Learning & Academic Research Institution for Master’s·PhD Students and Postdocs (G-LAMP) Program of the National Research Foundation of Korea (NRF), funded by the Ministry of Education (No. RS-2025-25442707). The experimental equipment used in this study was provided by Hyundai Motor Company.
Funding
This work was supported by BK21 FOUR Program by Chungnam National University Research Grant (2024), and the Global-Learning & Academic Research Institution for Master’s·PhD Students and Postdocs (G-LAMP) Program of the National Research Foundation of Korea (NRF), funded by the Ministry of Education (No. RS-2025-25442707).
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.