
Abstract
This study introduces a novel filter, termed the high-order unscented particle filter (HUPF). Utilizing the HUKF, HUPF advances the sample particles toward regions of higher likelihood and consequently derives an improved importance proposal distribution, closely aligned with the posterior probability. Distinct from the unscented particle filter, HUPF implements the high-order unscented transform instead of the conventional second-order variant. Due to the superior accuracy of the HUKF over the standard UKF, HUPF not only selects particles more judiciously, enhancing particle utilization, but also more effectively manages the tail decay rate of the proposal distribution. This approach enables HUPF to closely approximate the optimal posterior probability under typical Gaussian conditions. The efficacy of this method is demonstrated through a bearing-only tracking model example.
Introduction
Nonlinear filters are employed to estimate the state vector (x) of a nonlinear dynamical system that is influenced by noise based on measurements of nonlinear functions. These filters utilize the error covariance matrix to assess the uncertainty in the estimated state vector. In certain applications, the conditional probability density of x is notably non-Gaussian. Nonlinear dynamics or measurements can render the conditional density of x non-Gaussian, even when the measurement and process noise, as well as the initial uncertainty in x, are Gaussian. 1
When addressing nonlinear filtering challenges, two sub-optimal methods are commonly used: Kalman filters (KFs) and particle filters (PFs). Kalman filters’ latest research concentrates on two approaches: converted measurement 2 and converted state. 3 Presently, the extended Kalman filter remains the predominant method in nonlinear filtering. 4 This filter implements linearization using the Taylor expansion of the state or observation equation at each time step. However, its performance is moderate in highly nonlinear scenarios. The unscented Kalman filter (UKF) 5 and the cubature Kalman filter (CKF) 6 employ deterministic sampling to approximate the first and second moments of the estimator. While not always superior to the extended Kalman method, these methods offer novel concepts, ease of understanding, and satisfactory accuracy. The Conversion Measurement Kalman filter (CMKF) transforms measurement data from polar to rectangular coordinates to address the nonlinear observation function, followed by standard Kalman calculations. 7 However, this nonlinear transformation introduces transformation bias and can increase estimation bias due to the correlation between the error covariance of the transformed measurements and the measurement noise, potentially leading to covariance errors. To mitigate conversion bias, Debiased Conversion Measurement (DCM) and Unbiased Conversion Measurement (UCM) have been proposed.7–9 The Decorrelated Unbiased Measurement Transform Kalman filter algorithm (DUCMKF) is utilized to eliminate estimation bias. 2 Particle filter (PF) is regarded as one of the most promising approaches for nonlinear filtering challenges, 10 first clearly articulated by Gordon et al. 11 Recently, Dai and Daum introduced a novel particle filtering solution named the particle flow filter, claiming it to be significantly faster than standard particle filters while maintaining accuracy. 12 For comprehensive insights on nonlinear filtering, readers are referred to the existing literature.1,13
The degeneracy problem presents a significant challenge in particle filters, characterized by an undesirable effect. To mitigate its impact, two methods are primarily employed: (a) the strategic selection of importance density, and (b) the implementation of resampling. 14 Consequently, the choice of the proposal distribution is pivotal, directly influencing the performance of the particle filter. 15 Traditionally, the state transition prior distribution was utilized as the important sampling function. However, this approach has demonstrated limited estimation accuracy in scenarios with “heavy tails” and high observation precision, primarily due to its failure to incorporate the latest observational data. In response, the extended Kalman filter (EKF) strategy was adopted, integrating recent observations to enhance the approximation of the state posterior probability density function. 16 Building on this concept, the UKF was applied to particle transfer, leading to the development of the unscented particle filter (UPF). 17 This method effectively merges the latest observational information and addresses “heavy-tail” issues. Similarly, the CKF was employed for particle transfer, resulting in the cubature particle filter (CPF), 18 which surpasses the classical particle filter (PF) in estimation accuracy. Particle degradation, a prevalent issue in sequential particle filters, arises as the variance of importance weight invariably escalates over time, necessitating particle merging. 15 Merely increasing the number of particles proves inefficient in resolving this issue. To tackle this, degradation is often artificially masked by substituting high-importance weights with numerous repeated particles, thereby introducing significant correlation between particles. 14 This paper introduces an approach employing the high-order unscented Kalman filter (HUKF) for particle transfer and the subsequent derivation of the importance sampling function. The method, termed HUPF, aims to alleviate degradation and enhance particle efficiency by optimizing the proposal distribution to the greatest extent possible.
High-order unscented Kalman filter
The high-order unscented particle filter (HUPF) introduced in this research adopts a high-order unscented transformation, marking a significant departure from the traditional second-order unscented transform (UT) typically employed in standard unscented particle filters. This advanced UT is grounded in the principles of the fifth-order cubature transform (CT) and integrates a free parameter, κ. The inclusion of κ effectively addresses the unresolved degrees of freedom present in the high-order UT, thereby enabling the resolution of complex equations that feature cross-coupled high-order terms involving unknown variables. As a result, analytical solutions for both the high-order UT and the care derived. The HUKF represents a more generalized, higher-order filter with specific selection rules for its sampling points:
In this framework, the first set of sigma points, along with their corresponding weights, are calculated in accordance with equation (1).

The methodology progresses by defining a second set of sigma points and their weights, where
The third set of sigma points as well as their weights are established as indicated in equation (3).

The high-order UT enables the distribution parameters of sigma points to conform to specific requirements by selecting appropriate values for κ, as stated in equation (5).

Consequently, this enables the acquisition of the Gaussian random vector X’s sixth-order principal moment, thus improving the precision of the UT. The algebraic equation for determining κ is given in equation (6).

In the case of two dimensions, the optimal value of κ has been identified as 0.835, 19 leading to the formulation of the HUKF.
High-order unscented particle filter
In the HUPF, the HUKF is utilized for the transfer of sampled particles. This process aims to acquire the high-order version of the UPF, following a similar methodological structure. The procedure for integrating observation information is delineated below:
Initially, a set of particles

The first sigma point

The second set of sigma points

These sigma points for the state vector
A one-step prediction
The covariance of the one-step prediction estimation error
Assuming the a priori probability density function

The first sigma point

The second set for sigma points
Subsequently, the sigma points for the state vector

A one-step prediction
The covariance of the one-step prediction estimation error
The cross-correlation covariance matrix
The filtering update steps are as follows:
Calculate the filter gain

Calculate the state estimation

Calculate the state estimation error covariance matrix

Sampling is conducted using the importance density function (IDF).

The weight of each particle is estimated and normalized below.

By sampling (selecting) particle

The estimated output is then provided (28).

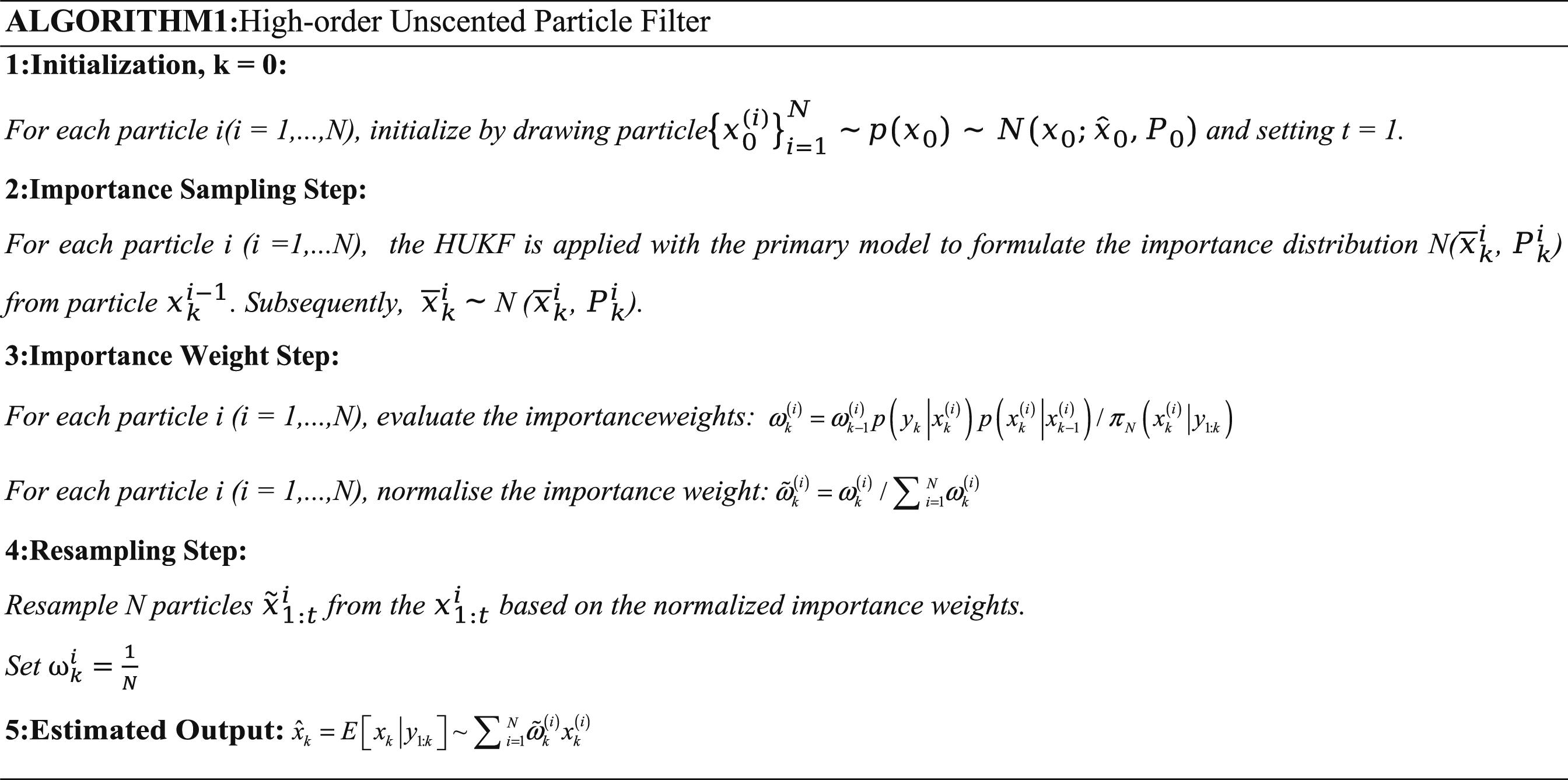
The procedure for implementing the HUPF is delineated in Algorithm 1.
Simulation example
To illustrate the efficacy of the proposed high-order UPF delineated in this study, the bearings-only tracking model, incorporating Gaussian noise as referenced in 20, was adopted. The rationale for not employing a heavy-tailed distribution lies in the absence of a suitable two-dimensional system model and its state variable, which is characterized by heavy-tailed distribution noise. The classical model was chosen due to the algorithm’s inherent advantage in this study: the meticulous selection of particles. Even if it is not a “heavy-tail” case, but a general Gaussian case. We can make more effective use of a small number of particles in the likelihood tail to highlight the advantages of our algorithm. While the precision achieved through a non-heavy-tailed distribution may not be markedly significant, it aptly demonstrates that the distribution derived from higher-order UKF more accurately aligns with the posterior probability density. The bearing-only tracking model represents a two-dimensional nonlinear model, and its discrete formulation is as follows:


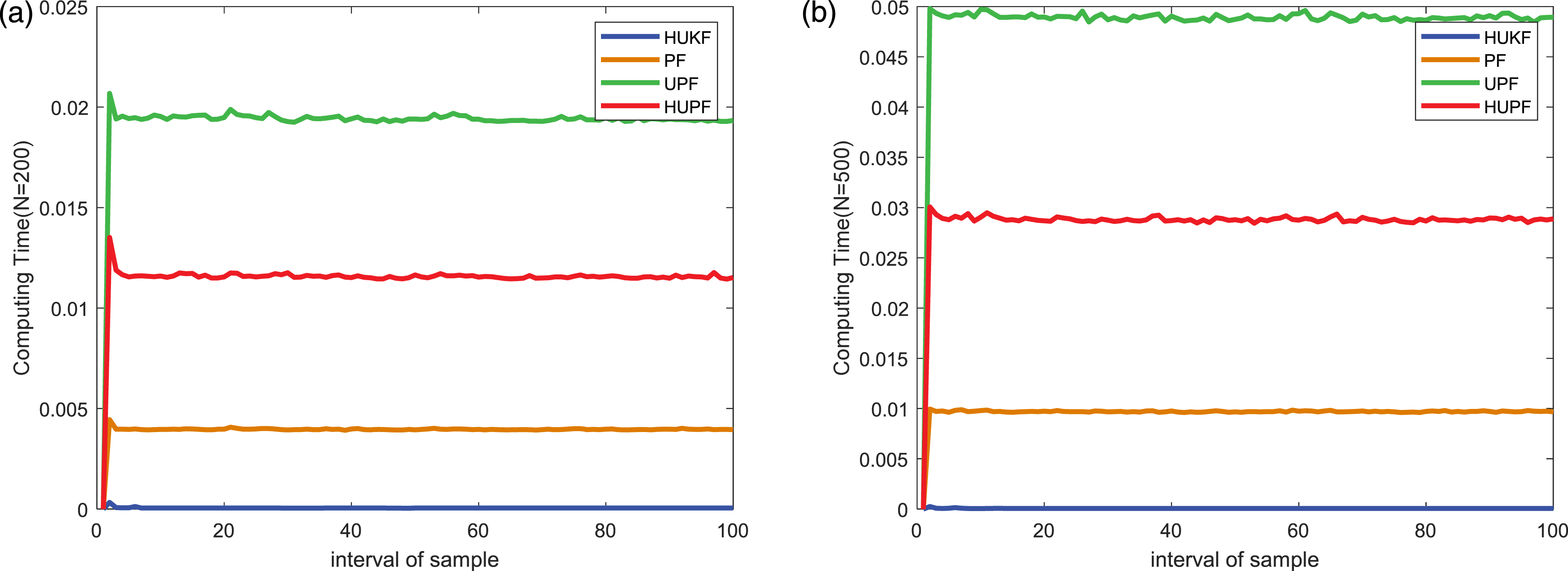
To further elucidate the results, the averaged mean square errors (MSEs) and CPU times for the HUPF and other methods in the bearings-only scenario are presented in Figures 1 and 2, and Table 1. It has been observed that the proposed HUPF significantly enhances computational efficiency while maintaining estimation accuracy comparable to that of the UPF. The use of higher-order Kalman filtering enables more effective particle utilization at each moment, rendering it more efficient than UPF and meriting additional research. In contrast, employing the UKF for optimizing the proposal distribution results in increased computation compared to the Particle Filter (PF). However, within the parameters of this study, this increase in computational demand is offset by an improvement in estimation accuracy. A notable concern is the instability of UKF, which may occasionally lead to divergence and thus affect filter accuracy. This issue warrants further investigation. The mean square error outcomes are illustrated in Figures 1 and 2, as well as Table 1. The mean square error curves for state estimation in Figures 1 and 2 reveal a marginal superiority of HUPF over other filters. Theoretically, in a two-dimensional case, the mean value calculated by the second-order unscented transform (UT) (κ = 1) achieves partial fourth-order accuracy. When κ = 0.835, the mean calculated by higher-order UT achieves partial sixth-order accuracy, surpassing that of the second-order unscented particle filter, thereby approximating the optimal proposal distribution and yielding better accuracy. Further detailed simulations on this problem are planned for future work. (a) estimates of position state X (1) and (b) estimates of position state X (2). (a) computing time (s), N = 200 and (b) computing time(s), N = 500. MSEs of different filters.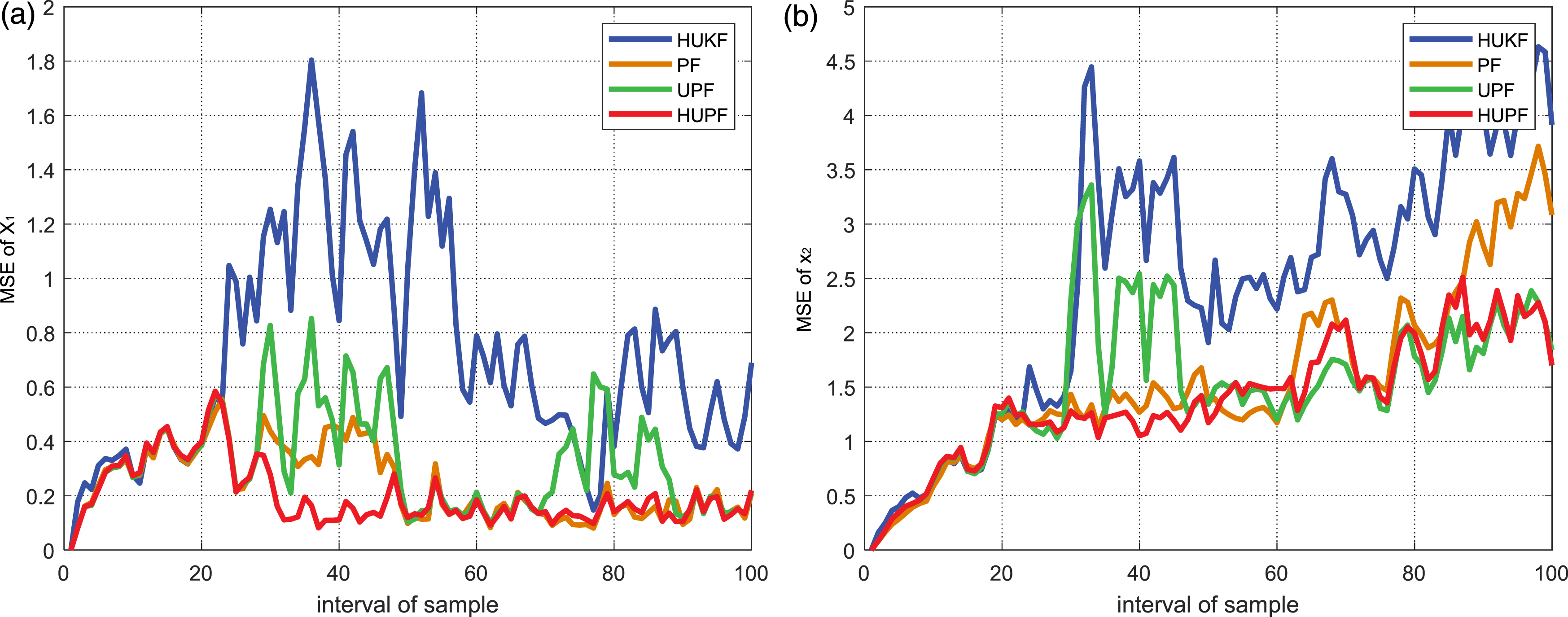

Given the significance of the heavy-tails case, future experiments are contemplated to validate the method’s extensive applicability.
Conclusions
In this study, a novel HUPF method is introduced. It enhances estimation accuracy by integrating the latest observational data and improving particle utilization, effectively reducing particle degradation. The improved efficiency in particle utilization has led to an increase in algorithmic efficiency compared to the traditional UPF. This paper delineates the specific implementation steps and theoretical underpinnings for the practical deployment of HUPF, providing a comprehensive framework for its application in relevant fields.
Statements and declarations
Footnotes
Conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was supported by the Defense Science and Technology Key Laboratory Fund under Grant No. 2023JCJQLB3301 and the Hanjing National Laboratory Open Fund under Grant No. KF2024025.