
Abstract
Based on a simulation testing platform, the correlation between the main vehicle’s following speed, following distance, and other parameters under sudden traffic conditions is analyzed. An experimental scenario of “front vehicle stationary, preceding vehicle suddenly cutting out, and main vehicle decelerating to avoid collision” is designed. Through the collection and analysis of experimental data, the data in the simulation process is tracked, and the response performance of the main vehicle under different parameter conditions is evaluated. Latin hypercube sampling generalization tests are used to further explore and verify the applicability of the findings. The research indicates that the following speed and following distance exhibit a quadratic function relationship. Reasonably optimized following speed and following distance can significantly enhance vehicle driving safety.
Introduction
With the rapid development of autonomous driving technology, the safety and reliability of vehicles in complex traffic environments have attracted widespread attention. 1 Closed-road and open-road tests for vehicle safety face issues such as high testing costs and a lack of extreme testing scenarios. 2 Simulation testing can accurately describe the dynamic relationship between autonomous vehicles and various components of the driving environment under specific driving tasks over a period of time. 3 It allows for extensive virtual testing before actual vehicle testing and can detect the response capability 4 and decision-making strategies 5 of the system and vehicle, effectively verifying intelligent driving functions. 6
The research experiment refers to Appendix A.5 of the i-vista2023 test procedure, 7 and designs an experimental scenario of “front vehicle stationary, preceding vehicle suddenly cutting out, and main vehicle decelerating to avoid collision.” It aims to simulate typical sudden traffic situations and analyze the driving conditions of the main vehicle under different following speeds and following distances. Through the collection and analysis of experimental data, the relationship between parameters such as speed and distance is explored, and data generalization techniques are used to verify the applicability of the experimental conclusions.
Introduction to the autonomous driving simulation platform
Autonomous driving simulation testing
Ensuring driving safety of autonomous vehicles in sudden events, adverse weather, and extreme road conditions has become a critical issue in autonomous driving technology. 8 To prove that an autonomous driving system is safe, theoretically, a vast number of scenarios need to be tested to fully demonstrate the system’s safety. 9 The core of simulation testing lies in the ability to simulate various driving scenarios and emergencies by building virtual scenes and vehicle models without the need for real vehicles or roads. 10 It not only reduces costs and safety risks but also provides feasibility for large-scale experiments. Through a high-fidelity simulation platform, developers can comprehensively test the perception, decision-making, and control modules of the autonomous driving system, providing key data support for its optimization and upgrading. 11
VTD simulation software
Virtual Test Drive (VTD) is a vehicle simulation software developed by the German company VIRES, used for the development and testing of autonomous driving systems. VTD provides a customizable virtual environment that can accurately simulate various traffic conditions. Its core functions include constructing static/dynamic scenes, using vehicle dynamics simulation models for vehicle driving and environment interaction, and integrating with external systems for joint simulation. 12 Specifically, it can generate or read odr road information files, osgb image data files, xml/xosc dynamic scene files, interface with third-party software and functional plugins, and generate parameter data during the simulation process.
Simulation platform overview
The architecture of the simulation platform used in this research experiment is shown in Figure 1. The operation of the platform mainly consists of three steps: First, based on the scenario library, suitable test scenarios are selected, and the initial conditions of the simulation, such as the initial vehicle position, are defined. Then, the vehicle model, dynamics model, driver model, and the algorithm under test (integrated with the Carlink collaborative control framework) are selected, and the VTD simulation software is invoked to achieve multi-module interaction and simulation. After the simulation ends, the required target data, such as the state parameters of the tested vehicle, are selected and extracted from the test database for subsequent analysis and performance evaluation. Simulation platform architecture.
As the core component of the algorithm under test, Carlink enables real-time data interaction between the algorithm module, vehicle model, and Trigger instructions during the simulation process, supporting multi-protocol and multi-configuration compatibility. Through the built-in state machine management module, it monitors experimental parameters and dynamically adjusts various parameters during the simulation. The timestamp function is utilized to coordinate the VTD simulation step size with the algorithm decision-making cycle, reducing timing mismatch errors.
In this experiment, to minimize the interference of sensors on the experimental results, the sensor model is not used. A test experiment is conducted to anchor the parameter configuration, and the vehicle is fully controlled through the algorithm and Trigger.
Generalization method: Latin hypercube sampling
Latin Hypercube Sampling (LHS) is a statistically efficient sampling method widely used for high-dimensional space sampling strategies. It effectively performs uniform spatial sampling of multiple variables by dividing the range of each variable into multiple intervals and selecting a sample point within each interval, ensuring a uniform distribution of samples. 13
For each dimension j∈[1,d] in a d-dimensional space, the domain of each dimension j is first divided into n equal-width subintervals, with the interval width denoted as interval_size[j]. Then, according to the order of each dimension j, a random permutation Pj of length n is generated. Each sample point Pj[i] (1 ≤ i ≤ n) undergoes uniform random sampling within its corresponding subinterval. Finally, the sampling results of each dimension are arranged and combined to form an n × d sample matrix, where the ith sample data can be represented as {P1[i], P2[i]…Pj[i]…Pd[i]}. 14
The Latin hypercube sampling pseudocode will be presented below, and sampling will be demonstrated using two methods: normalization and obtaining specific sample data:
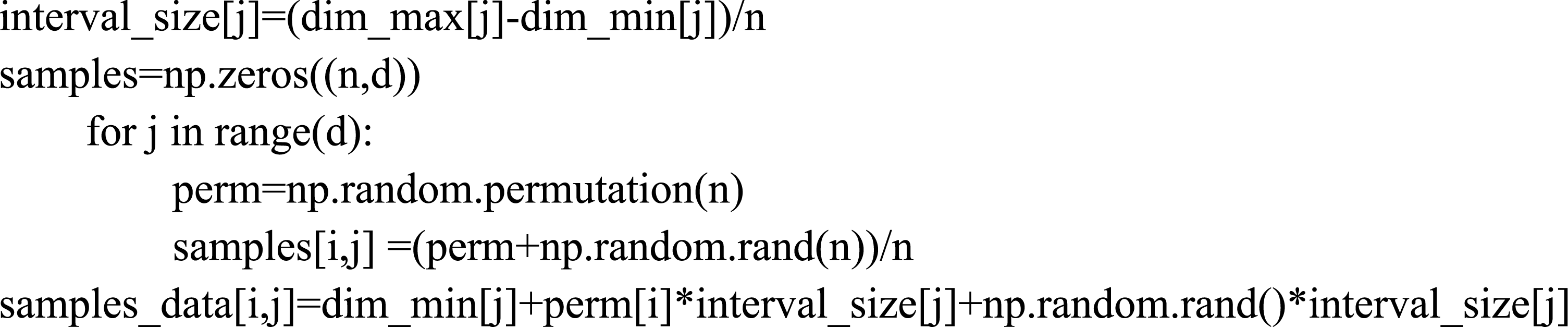
Latin hypercube sampling has the following advantages: It uniformly covers the entire space, ensuring that the entire interval of each dimension is adequately represented. It effectively reduces the occurrence of redundant data points, improves sampling efficiency, and reduces the number of sampling points. It guarantees the unbiasedness of each dimension, and the sampling results have high representativeness. 15
Scenario and experimental design
Simulation scenario design
The content of this experiment is “front vehicle stationary, preceding vehicle suddenly cutting out, and main vehicle decelerating to avoid collision.” To achieve this goal, it is necessary to design the corresponding Opendrive static map and Scenario dynamic settings based on this content.
In the design of the Opendrive static map, the length of all the vehicles is 4.674 m, the experiment prepares a three-lane road with a length of at least 1 km, and the width of each motor vehicle lane is 3.75 m, providing the preceding vehicle with the necessary driving space for cutting out of the current lane. Additionally, to avoid interference from other environmental factors in the experimental scenario, the overall structure of the road is set as a straight line and configured as a one-way driving section without intersections, ensuring that the driving behavior of the main vehicle and the preceding vehicle are the primary focus of the experiment.
In the design of the Scenario dynamic settings, it is necessary to simulate the time required for the main vehicle to identify the stationary front vehicle after the preceding vehicle cuts out. At the same time, to reduce the interference of sensor errors on the experimental results, a relatively fixed trigger moment is set for the deceleration event of the main vehicle. Specifically, the experiment takes the time point when the preceding vehicle completely leaves the center line of the current lane as the trigger moment for the main vehicle’s braking, as shown in Figure 2, Ego represents the main test vehicle, which needs to successfully brake without colliding with the front vehicle. VT1 is the preceding vehicle that cuts out, and VT2 is the stationary target vehicle in front. This design provides a stable trigger condition when the lane change time of the preceding vehicle remains unchanged, while realistically simulating the scenario where the main vehicle observes the stationary front vehicle and performs an avoidance response. Experimental scenario diagram.
Experimental procedure and data collection
Data collection is the core part of this experiment. All experimental data is collected in real-time through the built-in data tracking and recording function of the simulation platform. The required vehicle coordinate information is selected to generate CSV files for data storage. To comprehensively evaluate performance, we collect various data, including but not limited to vehicle position, speed, and acceleration, from which we can derive other indicators such as distance between vehicles and whether a collision has occurred.
We first perform a small test experiment, focusing on collecting data when the experimental vehicle performs a rapid lane change at a test condition of v = 60 km/h and TTCTV1_TV2 = 1.5 s. We calculate the time point when the vehicle completely leaves the center line of the current lane, determining the time point to control the main vehicle’s braking in the basic experiment, to better simulate the main vehicle’s actual identification and response process to the front vehicle.
After obtaining the results of the test experiment, we set up subsequent experiments based on the test results. The specific process is shown in Figure 3: Basic experimental flowchart.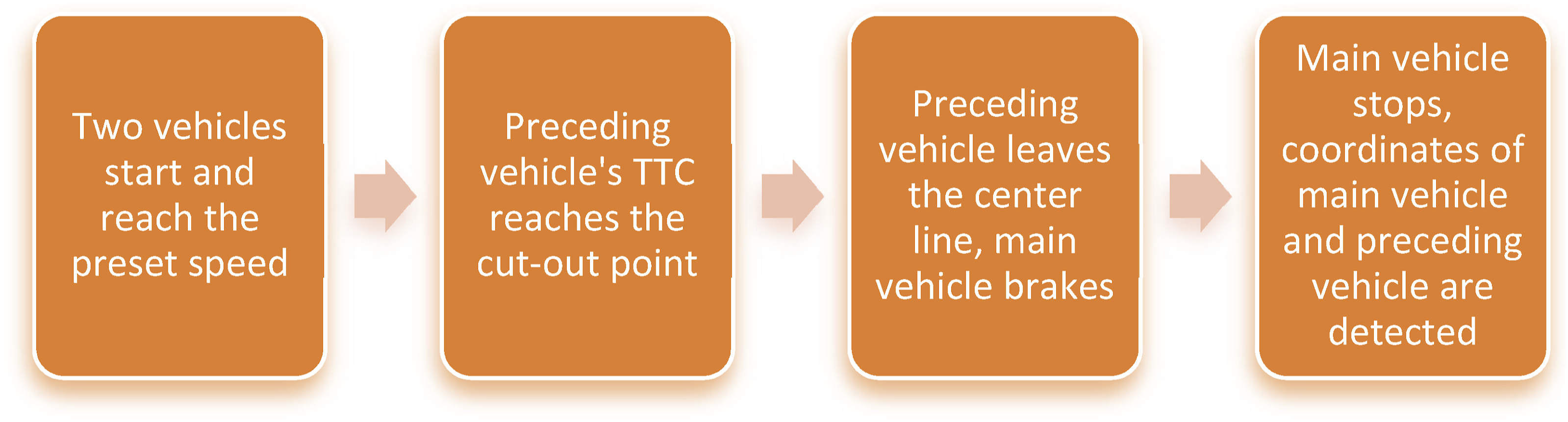
After the experimental data is collected in real-time through the VTD platform, all data is recorded as CSV files, and we need to conduct in-depth analysis of this data. First, the most important indicator is whether a collision occurs between the main vehicle and the stationary front vehicle. Collision detection is based on the distance between the main vehicle and the front vehicle. When the distance between the two vehicles is less than the set safety distance, it is determined that a collision has occurred.
On the basis of collision detection, to assess whether the main vehicle can effectively avoid the preceding vehicle, we further analyze the distance between the vehicles after braking and calculate the minimum distance between the main vehicle and the preceding vehicle. Additionally, we calculate the theoretical remaining distance, which is the distance theoretically remaining between the main vehicle and the front vehicle after the main vehicle brakes while traveling with the current data. This is used for theoretical analysis of the data and to determine the accuracy of the simulation. A smaller value of the theoretical remaining distance indicates a higher risk of collision between the main vehicle and the front vehicle, while a larger theoretical remaining distance indicates a greater margin for reaction in potential collision scenarios. Through these indicators, we can quantitatively evaluate the safety margin in sudden traffic situations.
Basic experiment
Basic scenario parameter settings.

Through the above dynamic settings, the experiment effectively simulates the sudden traffic situation, accurately reproducing the scenario where the front vehicle is stationary, the preceding vehicle suddenly cuts out, and the main vehicle decelerates to avoid a collision. It also provides relatively precise trigger conditions and controllable initial states for analyzing the deceleration avoidance behavior of the main vehicle.
Controlled variable experiment
Generalization parameter settings.

We calculate the theoretical remaining distance and analyze its relationship with parameters such as following speed and following distance through the actual calculated data obtained from tests in different scenarios.
For the parameters actively controlled by the driver, namely, the vehicle speed and the following distance, the experiment selects a bias of 40% to conduct a preview of the subsequent generalization experiment. For the parameters that cannot be actively controlled, that is, the lane-changing time of the front vehicle and the maximum acceleration of main vehicle affected by the road friction coefficient, the experiment selects a bias of 20% to briefly observe the influence of these two factors on this experiment.
By using the method of controlling variables to pre-separate the independent effects of each parameter, then to clarify the influence of different variables on the system, meanwhile, to avoid the confounding effects caused by the superposition of multiple factors. Besides, the experiment verifies the completeness of the model by comparing the theoretical remaining distance with the observed actual remaining distance, to reveal the deviation patterns between the driver’s behavior characteristics in actual driving scenario and the ideal model in simulation.
Generalization experiment
To obtain guiding opinions on vehicle driving under general conditions, that is, when the preceding vehicle’s reserved time remains unchanged at TTCTV1_TV2 = 1.5 s, the road surface is dry, and the vehicle brakes normally at AEgo = 5(m/s2), we utilize Latin hypercube sampling to conduct a large number of generalization experiments on two parameters: vehicle driving speed and the following distance between the main vehicle and the preceding vehicle. This allows us to explore the safe following distance that vehicles should maintain while following other vehicles.
The experiment employs the Latin hypercube sampling method to generalize the two parameters of vehicle driving speed and following distance, that is, two-dimensional sampling. Since vehicle speed V = 60 km/h and following distance L = 25 m balances safety margin and traffic efficiency well, according to the standard parameters of the basic experiment, they are chosen to be center values of sampling range. Meanwhile, high-risk experimental scenarios at higher speeds are emphasized. Therefore, the sampling range is selected as driving speed V = [50, 80]km/h and following distance L = [15, 35]m, with step sizes of 0.5 km/h and 0.67 m, respectively. The two parameters are divided into 61 data points each, and then randomly combined to ultimately obtain a total of 61 data points for subsequent experimental analysis. This method ensures the overall coverage of the parameter range, resulting in high representativeness and confidence in the results. The generalization details are shown in Figure 4. Speed-distance generalization display.
Experimental results and discussion
This chapter will present the experimental results in detail and analyze and discuss the experimental data. Through simulation tests in different scenarios, the dynamic response performance of the main vehicle in various situations is analyzed, exploring the influence of parameters such as following speed and following distance on the safety and performance of the autonomous driving system.
Experimental results overview: Test scenario
Test scenario data of VT1.

In Figure 5, the map is set in an east-west orientation, with the X-coordinate representing the position in the driving direction and the Y-coordinate representing the lateral position on the road. VT1 starts to change lanes to the left lane at 10 s, and the preset lane-changing time is T = 1.5 s. Based on the provided X- and Y-coordinates and the heading angle of the vehicle, it can be calculated that at 10.8 s, VT1 has completely crossed the centerline of lane. Therefore, in multiple-vehicle scenario, it is the timing of 0.8 s after VT1 starts to change lane when ego vehicle starts the brake operation. Vehicle position of VT1.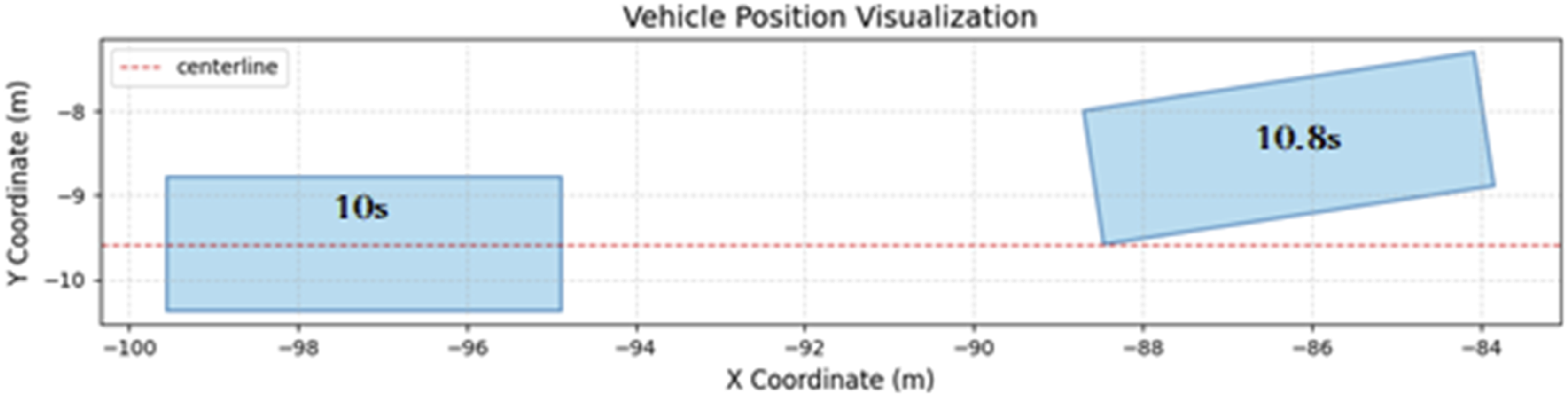
By analyzing the test data of this scenario, we simulated and determined the influence of the preceding vehicle’s lane change behavior on the starting time of the main vehicle’s deceleration, providing a reference basis for subsequent experiments and generalization tests. This allows us to simulate the adaptability of the main vehicle to changes in the preceding vehicle’s behavior and determine that the response time of the main vehicle will directly affect the evaluation of its risk avoidance capability.
Experimental results overview: Basic and controlled variable experiments
Through the test experiment, we have effectively set up the braking event of the main vehicle. That is, the host vehicle initiates the braking operation 0.8 s after the front vehicle changes lanes providing a reference for the scenario setup of the basic experiment.
Position coordinates of main vehicle and front vehicle.
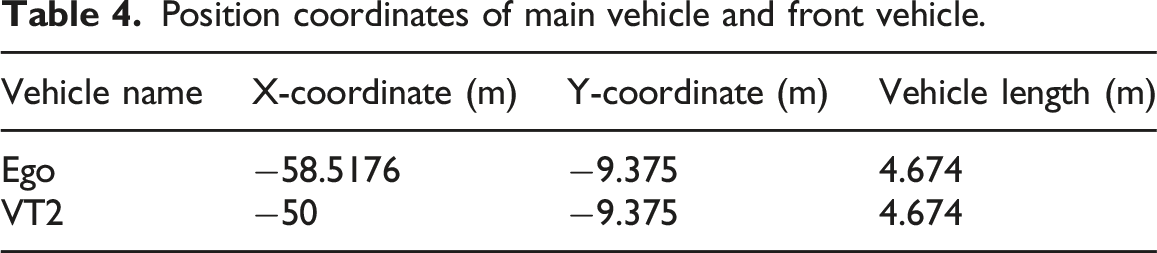
From the above table, it can be calculated that the stationary distance between the main vehicle and the front vehicle is:
The experiment demonstrates that the main vehicle successfully braked and avoided a collision with the stationary front vehicle, indicating that this is a good set of following parameters that can effectively prevent sudden incidents.
Generalization scenario position coordinates.

In the above experiments, we conducted targeted research by adjusting and controlling parameters such as the following distance of the main vehicle, the lane change moment of the preceding vehicle, and the driving speed of the vehicles. The experiments show that in some scenarios, the main vehicle failed to brake in time, resulting in a collision with the front vehicle.
Experimental results overview: Generalization experiment
In the generalization experiment, the experimental results are shown in Figure 6. Regarding the final states of the two vehicles in the figure after the test, we use three colors for identification. The first is red, indicating a collision between the two vehicles, suggesting that this following state is unacceptable. The second is yellow, indicating that although no collision occurred between the two vehicles, the distance between the rear of the following vehicle and the front of the preceding vehicle along the road direction is less than 4 m when the vehicles are stationary. In other words, when the main vehicle travels at a speed of 60 km/h, the collision time between the two vehicles is TTCv = 60 < 0.25 s, indicating that although this state can avoid a collision, there is still a significant risk. The third is green, indicating that no collision occurred between the two vehicles, and the distance between them after stopping is greater than 4 m, suggesting that the vehicle operation is relatively safe. Experimental results display.
The overall experimental results present a pattern of green in the upper left and red in the lower right. The experiments indicate that when the speed is relatively fast or the following distance is relatively close, the main vehicle has a high risk of collision with the stationary front vehicle, and collisions may even occur. By maintaining a good distance from the preceding vehicle or maintaining a lower driving speed, the collision risk of the main vehicle can be significantly reduced.
Experimental results analysis
Through the above experimental overview, we have gained an intuitive impression of the experimental scenario of “front vehicle stationary, preceding vehicle suddenly cutting out, and main vehicle decelerating to avoid collision.”
Taking the basic experimental scenario as an example, the distance between the main vehicle and the preceding vehicle is 25 m. The preceding vehicle changes lanes when TTCVT1_VT2 is 1.5 s, and then the main vehicle recognizes the stationary vehicle ahead and starts braking after approximately 0.8 s. The maximum reaction distance provided to the main vehicle is:
Half of the vehicle length is subtracted because the vehicle coordinates recorded in the CSV are the coordinate positions of the vehicle center, and a collision event occurs when the rear of the vehicle is hit.
Therefore, the main vehicle needs to successfully brake within this distance to avoid a collision. In this scenario, the actual reaction distance of the vehicle is:
Generalization scenario data analysis.

Furthermore, we found that the actual remaining distance is always smaller than the theoretical remaining distance. This is because when we calculate, the deceleration AEgo is directly taken as the maximum value of 5, but when braking a vehicle in the simulation software or the real world, the vehicle’s deceleration gradually increases to the maximum value, taking a period of time to change. This leads to a larger average deceleration value in the theoretical calculation, resulting in the theoretical remaining distance being greater than the actual remaining distance, as shown in the above table.
In the generalization experiment, we studied the relationship between the inter-vehicle distance and the vehicle speed while controlling the deceleration AEgo and the reaction time TTC. Theoretically, if we want the vehicle to avoid a collision, the relationship between the two is:
Substituting the previous formula and specific values: AEgo = 5 m/s2, LSum of Vehicle Lengths = 4.674 m, TTCVT1_VT2 = 1.5 s, we can obtain the simplified formula:
Drawing this curve in Figure 7. “Distance-speed” curve.
In our generalization experiment, the value ranges of the following distance and vehicle speed are [15, 35] and [50, 80], respectively. This is consistent with our experimental results in the monotonically increasing part of this parabolic curve. Moreover, this curve is located at the boundary between the yellow and red squares, effectively describing the relationship between the following speed and following distance that vehicles should adhere to.
Furthermore, we can observe that when the vehicle speed is low, the change in the following distance is relatively gradual. However, when the vehicle speed is high, the required following distance increases significantly. In particular, when the vehicle speed exceeds a certain threshold, the growth of the following distance increases exponentially. This indicates that as the vehicle’s driving speed increases, the driver or the autonomous driving system needs to reserve a longer safety distance for potential collision risks.
Additionally, similar to the controlled variable experiments, there is an error in the vehicle deceleration AEgo in the generalization experiment. In fact, L-v parabolic curve should move toward the upper left and narrow its opening, so that the red points originally on the “distance-speed” curve will then be below the curve.
Conclusions
This study constructed an experimental scenario of “front vehicle stationary, preceding vehicle suddenly cutting out, main vehicle decelerating to avoid collision” through a simulation platform and verified the safety and stability of the autonomous driving system through basic experiments and generalization experiments. The main conclusions are as follows: (1) In general scenarios such as the basic experiment, when the recognition and response are timely, the vehicle can avoid collisions relatively smoothly, verifying the effectiveness of the experimental scenario and model. (2) The controlled variable experiment shows the state of host vehicle following another vehicle, and factors including environmental conditions all have significant impacts on the collision outcome. For example, on the wet and slippery road, an additional distance is required to keep away from the front vehicle. In extreme cases, the system fails to avoid a collision, revealing its performance boundaries. (3) The generalization experimental results clarify the relationship between the safe following distance and vehicle speed. In practical applications, especially in the design and testing process of autonomous vehicles, the influence of vehicle speed on the safe following distance must be fully considered. A dynamic adjustment strategy for the following distance should be adopted to ensure that a sufficient safety distance can be maintained even at high speeds, effectively preventing potential collision risks.
Footnotes
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: Supported by the Science and Technology Research Program of Chongqing Municipal Education Commission (Grant No. KJQN202303223); and the Doctoral Fund Project of Chongqing Industrial Vocational and Technical College (2022GZYBSZK1-01).
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.