
Abstract
This study proposes a green logistics optimization model leveraging IoT data for route planning and energy efficiency in smart cities. The primary objective of this model is to address the traffic scheduling challenges in automated logistics transportation, enhance transportation efficiency, and minimize energy consumption. A novel model integrating the Sparrow Search Algorithm (SSA) and Bidirectional Gated Recurrent Unit (Bi-GRU) is proposed. SSA is first employed to optimize route planning, taking into account environmental factors such as traffic congestion, thereby providing a globally optimized initial solution. Subsequently, Bi-GRU adjusts the route in real-time according to historical data, including vehicle speed and cargo status. This integration fully exploits the complementary advantages of the two algorithms: SSA’s global optimization ability and Bi-GRU’s dynamic adjustment based on time-series information. Experimental results demonstrate that the application of this method can significantly reduce the unit transportation time of goods by 38.75% and the unit transportation energy consumption of goods by 23%. Finally, the paper explores the prospects of green logistics development based on Internet of Things technology in the development of smart cities, offering insights for future research and practical applications.
Introduction
Since the onset of the 21st century, the proliferation of private cars has surged, bringing with it a dire consequence of increased traffic congestion. Additionally, the rapid expansion of the internet has spurred significant social and economic transformations. Against this backdrop, the development of smart cities has emerged as a crucial strategic imperative for governments and corporations worldwide. 1
The objective of constructing smart cities is to employ contemporary information technology to attain intelligent, effective, and sustainable city management and services, ultimately enhancing the efficiency of urban management and the standard of living of its residents. In the pursuit of building smart cities, the integration of IoT technology is deemed a fundamental component. IoT technology imparts the capability to administer and provide intelligent services in diverse domains of the city, ranging from smart transportation to environmental conservation, and even venturing into the realm of smart healthcare, all of which can be accomplished through the efficacy of IoT technology. 2
Incorporating IoT technology into transportation logistics is a crucial aspect and a fundamental pillar for urban functionality and progress. The implementation of IoT technology in transportation logistics bears the potential to realize intelligent transportation, sophisticated logistics, and smart parking amenities, ultimately enhancing transportation efficacy. Furthermore, it can aid in mitigating issues like traffic congestion and environmental degradation, thereby contributing toward a sustainable urban environment. 3 Intelligent logistics represents a pivotal application within the transportation and logistics sphere of smart cities. By harnessing the power of Internet of Things technology, it is possible to achieve real-time tracking, monitoring, and management of goods, including a plethora of information such as the precise location, status, and temperature of such goods. Furthermore, through the implementation of intelligent scheduling and route planning, it is feasible to optimize the efficiency and cost of logistics transportation, thereby enhancing the quality and reliability of logistics services. 4 The present state of IoT technology development has reached a level of maturity, yet the progress of smart transportation construction in urban areas remains impeded by challenges such as exorbitant costs and policy hurdles. Nevertheless, several IoT-based transportation logistics applications have emerged in particular contexts that offer the potential to enhance the quality and efficacy of urban transportation and logistics services, mitigate traffic congestion and environmental degradation, and advance the development of smart cities.
Unmanned driving, when coupled with the Internet of Things technology in particular contexts, can efficaciously address the issue of exorbitant management and labor expenses. 5 For instance, the establishment of autonomous driving roads and deployment of unmanned vehicles in the logistics park, coupled with the installation of information monitoring nodes along the roads, could facilitate the efficient operation of the logistics transportation system. Unlike conventional human-driven transport, where drivers have a certain degree of autonomy and can complete the transportation job independently with effective instructions and scheduling, the logistics system based on the internet of things relies more on the information obtained from unmanned transport vehicles and the unified dispatch of the autonomous driving center to reduce the cost of transportation. Therefore, it is crucial for the autonomous driving center to make efficient scheduling decisions based on the information provided by the current monitoring nodes. 6
To address these issues, it is imperative to employ cutting-edge monitoring techniques and optimization algorithms to oversee the operational status of logistics vehicles and streamline vehicle dispatch during transportation, thereby elevating the transportation efficiency of the entire system while simultaneously reducing energy consumption. Currently, an increasing number of research studies are focused on exploring dependable dispatch algorithms for unmanned transportation systems and decision-making algorithms for autonomous driving. 7 One direction in the integration of green logistics intensive resources is the implementation of a model that combines multiple information nodes from the Internet of Things, using deep learning algorithms.
However, current research lacks integration of real-time IoT data with dynamic route optimization models capable of balancing energy efficiency and operational reliability. This study addresses this gap by proposing an SSA-Bi-GRU based framework for real-time logistics optimization. We present a novel approach that combines the Sparrow Search Algorithm (SSA) with Bidirectional Gate Recurrent Units (Bi-GRU) to optimize the efficiency and energy consumption of unmanned transportation systems. Our method effectively mitigates issues related to local congestion and reduces the overall energy consumption of the system. Specifically, the proposed approach utilizes IoT devices to monitor real-time road conditions in the logistics park, including variables such as vehicle count, transport volume, and driving speed. The algorithm aggregates information from multiple nodes in the IoT network to form a logistics park road information network. When a route planning and scheduling task is required for unmanned transportation vehicles, the control center employs the SSA to plan routes, avoiding congestion and reducing the number of start-stop cycles for transport vehicles, ultimately minimizing the energy consumption of the entire system. Finally, the scheduling strategy is automatically implemented by unmanned vehicles in the logistics park, achieving the optimal transportation efficiency and energy consumption as calculated by the proposed algorithm.
The proposed method, which combines the SSA with the Bi-GRU model, is validated in practical logistics systems. Our experimental results show that the proposed method can reduce the unit freight transportation time by 38.75% and lower the unit quality freight transportation energy consumption by 23%. Additionally, the method can assist logistics system managers in real-time monitoring of vehicle and road conditions in the logistics park, detecting malfunctions, and taking appropriate measures for repair, ensuring the safety and stable operation of the entire logistics system. Please let me know if you need any further improvements or modifications.
The main contributions of this paper are summarized as follows: (1) Development of a Green Logistics Intensive Resource Integration Model: A novel green logistics intensive resource integration model based on Bi-GRU combined with SSA has been designed and trained. This model effectively analyzes and processes the real-time data from IoT devices for logistics vehicle and cargo status, thereby optimizing transportation routes. (2) Logistics Vehicle Automatic Planning and Scheduling Optimization Method: A method has been implemented for automatic logistics vehicle planning and scheduling. This method computes the optimal route while monitoring vehicle and road status, avoiding congestion, responding to emergencies, and optimizing energy consumption to ensure stable and low-power operation. (3) Prospects for Smart City Development and IoT Integration: The potential application of the green logistics intensive resource integration model, based on IoT technology and deep learning algorithms, has been analyzed. This work demonstrates the promising future for integrating smart city technologies in logistics systems to improve operational efficiency and sustainability.
Related works
With the rapid development of the global economy and the exponential growth of the logistics industry, the scale and complexity of logistics systems continue to increase. Simultaneously, there is an increasing concern for environmental protection and efficient energy consumption. Therefore, the research on logistics path planning and energy consumption optimization has become increasingly important.
Logistics path planning and energy consumption optimization are currently the hot topics in the logistics field. In modern logistics systems, logistics path planning refers to determining the optimal route between a given start and endpoint, to minimize costs and time while satisfying various constraints. Energy consumption optimization, on the other hand, focuses on further minimizing energy consumption, reducing environmental impacts, and improving the energy efficiency of logistics systems based on logistics path planning. 8
To tackle these intricate problems, researchers generally employ mathematical models and optimization algorithms for investigation. These methods enable researchers to effectively address logistics path planning and energy optimization issues, thereby achieving efficient logistics system operation and environmental protection. For instance, Lee et al. simulated and modeled port transportation, studying various supply chain management methods. 9 However, their emphasis was on supply chain management and lacked the path planning aspect that this paper focuses on. Bortolini et al. utilized Building Information Modeling (BIM) technology to simulate logistics transportation in complex buildings, 10 studying the cost, time, and safety-related issues in logistics management. However, their optimization measures primarily focused on building planning, whereas this paper tackles the problem of designing driving routes on pre-planned roads. This article serves as a useful reference for the problem researched in this paper.
With the widespread adoption of technologies such as the Internet of Things (IoT) and 5G, the smart logistics industry has experienced rapid development. Informationization and intelligence have become crucial means for logistics parks to enhance service levels and improve business efficiency. Against this backdrop, traditional management methods have proved inadequate for complex logistics systems. Consequently, people have turned to the use of IoT devices for real-time information monitoring to assist in the management and scheduling of logistics systems. As IoT technology continues to evolve and be applied, it has found extensive application in the management and scheduling of logistics parks, providing robust support for the efficient operation of logistics parks. 11 Solomon et al. integrated time constraints with vehicle routing optimization to investigate the vehicle arrangement and made a breakthrough by utilizing heuristic algorithms in the solution. 12 However, due to the early research time, the IoT devices at that time were not yet fully developed, and the research did not consider real-time information combined with IoT devices, which had certain limitations. Osvald A et al. investigated the VRPTWTD problem of delivery vehicle speed dependence on departure time and distance between two locations, 13 and established a vehicle path optimization model. However, their research content used traditional algorithms, which had high algorithm complexity. Qi C took into account the constrained volume of the delivery vehicle compartment and used a particle swarm algorithm with local updating ability to obtain better results. 14 The focal point of this algorithmic research lies in the constraint of vehicle load capacity in relation to the volume of goods transported, which has implications for the efficiency of transport and the interplay between goods and vehicles explored in this article.
In recent years, with the growing popularity of machine learning techniques, an increasing number of researchers have employed machine learning approaches to investigate this issue. Golpîra et al. conducted a retrospective study of the accomplishments in the development of the Internet of Things over the past decade. 15 Miao et al. conducted an analysis of the bottlenecks in intelligent logistics systems, such as time-consuming large-capacity storage. They optimized the logistics system efficiency using Convolutional Neural Networks (CNN) and integrated the Internet of Things (IoT) with information processing technologies such as big data and cloud computing. This intelligent logistics approach enhanced all aspects of the business and optimized the current state of logistics services. 16 However, the algorithm utilized in this approach is not cutting-edge and fails to incorporate interrelatedness among various datasets.
Building upon these existing methods and recognizing their limitations in real-time and dynamic contexts, this study proposes a novel integrated framework combining SSA and Bi-GRU for enhanced logistics optimization.
Methods
Given the present level of urban development, the construction of smart cities still faces challenges such as high costs. However, the application of intelligent IoT devices in specific enclosed scenarios has already become considerably mature. 17 This article proposes a Green Logistics Intensive Resource Integration Model to address the problem of goods transportation paths in unmanned logistics parks. By utilizing IoT multi-node information devices to gather the entire logistics transportation status information in the control center, the aim is to optimize dispatching plans and transportation routes, improve transportation speed, and reduce operating energy consumption. To achieve this goal, we use historical operation data of logistics vehicles and roads collected by IoT devices to train a Bi-GRU model combined with SSA.
Overall framework
The model calculation process consists of two stages. The first stage is the SSA route optimization stage, through which we can obtain the best location of logistics vehicles and goods under the current state, and generate the optimal route. The location and route in the first stage only consider the current situation of each cargo and vehicle, while in reality, there may be multiple vehicles running on the same road at the same time, and they will affect each other as the state changes. Therefore, the second stage is the Bi-GRU processing stage for temporal information. Bi-GRU can combine the current and past vehicle and cargo status to plan and dispatch routes and vehicles, so that the first stage route can be modified in actual operation, and the speed of planned vehicles can be avoided to reduce fuel consumption. The overall process of the proposed method in this article is illustrated in Figure 1. Processing flow.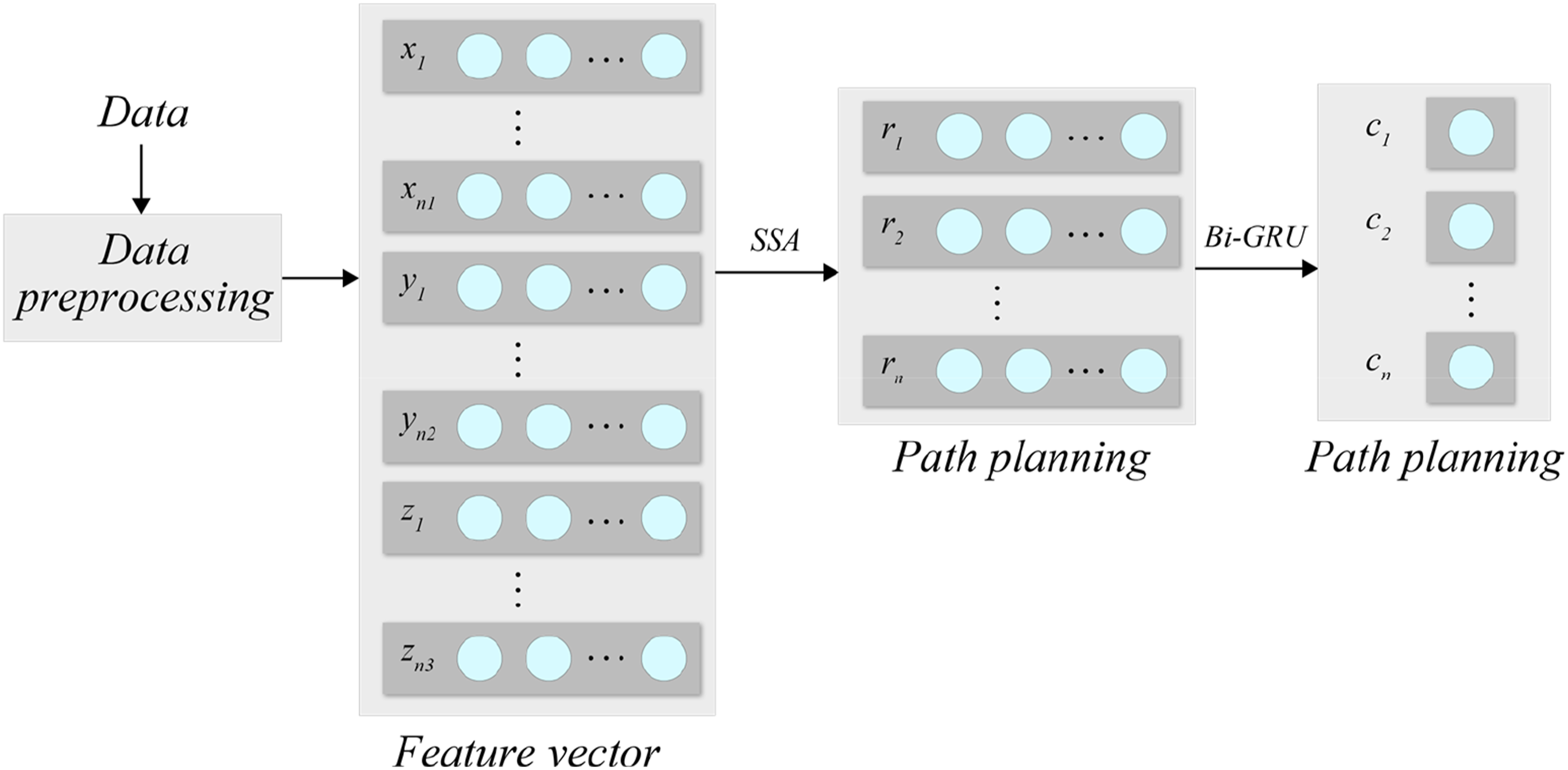
Figure 1 illustrates the overall process of the proposed method. Herein, n1 represents the quantity of vehicle operation information data, n2 denotes the quantity of road information data, and n3 signifies the quantity of cargo information data.
The utilized data in this study were collected by IoT monitoring devices, including vehicle operation information, road information, and cargo information. The vehicle operation information comprises the current location, speed, loaded cargo weight, and energy consumption of the vehicle, which serves as the primary basis for path planning in the model. The road information includes the congestion level, the number of vehicles, the average speed of vehicles, and the maximum allowable whole vehicle weight of the current road segment, which serves as a basis for avoiding traffic jams in the route planning. The cargo information includes the weight, volume, and duration of transportation, and the total transportation time of cargo serves as a basis for evaluating the efficiency of the logistics system.
Firstly, during the data preprocessing stage, it is necessary to convert all numerical information recorded in the dataset into vectors
SSA network
SSA is an intelligent optimization algorithm inspired by different behaviors performed by sparrows during their foraging process. Its global search ability is strong, and it demonstrates high search accuracy and stability, which to some extent surpasses existing algorithms. 18 This article applies the method to the planning problem of commodity transportation routes. The specific steps are as follows:
To begin with, the problem of path planning needs to be defined, which entails identifying the starting point, the destination, obstacles, and map information. The starting point represents the current location of the vehicle, while the destination refers to the location where the cargo needs to be delivered. The path also needs to include the location where the cargo is situated. The map information is obtained through monitoring devices.
Initialization: Set the starting point as the current state and add it to a set of states. Also, configure parameters such as search depth and maximum search times.
Random Movement: Starting from the current state, a new state is generated based on a heuristic search strategy and added to the set of states. For path planning problems, the new state can be obtained by moving from the current state to the surrounding positions.
Assessment: Assess the newly produced state and ascertain whether it constitutes an improved solution. Considering the attributes of the roads in the logistics park, we have established the evaluation function as the Manhattan distance from the present state to the destination point. The procedure for calculating the Manhattan distance is outlined in equation (1).

Update the current state: If the new state is superior, set it as the current state and add it to the collection of states; otherwise, maintain the current state unchanged.
Termination condition: If the termination condition is satisfied, such as reaching the specified search depth, exceeding the maximum search times, or finding the optimal solution, then the search will stop and return the optimal solution. Otherwise, return to step 3 and continue the search.
The iterative formula for vehicle location in SSA is given by equation (2).

In the given context, the variable
The iterative formula for the positions of other vehicles in SSA is given by equation (3).

In the formula,
Bi-GRU network
After completing the SSA iteration, it is necessary to utilize the output route information as input for the Bi-GRU network and train it on the training set. The effectiveness of the model can then be evaluated using a loss function.
The Bi-GRU represents a bidirectional gated recurrent neural network,
20
which is structured as illustrated in Figure 2. Bi-GRU network structure.
Bi-GRU is an advancement built upon the GRU architecture. GRU, a more proficient design than conventional recurrent neural networks, incorporates two gated units to regulate the information flow, thereby resolving the long-term dependency issue. The Bi-GRU model supplements forward and backward recurrent neural networks to the GRU, facilitating the incorporation of preceding and subsequent contextual information at the current moment. 21 In the Bi-GRU model, the forward and backward GRU units, respectively, handle the forward and backward information of the input sequence. Then, their outputs are concatenated to obtain a more comprehensive representation.
In Figure 2, the first row of GRU blocks comprises of forward GRU, where the output



The loss function of Bi-GRU adopts cross-entropy loss function, as shown in equation (7).

By utilizing the predicted outcome
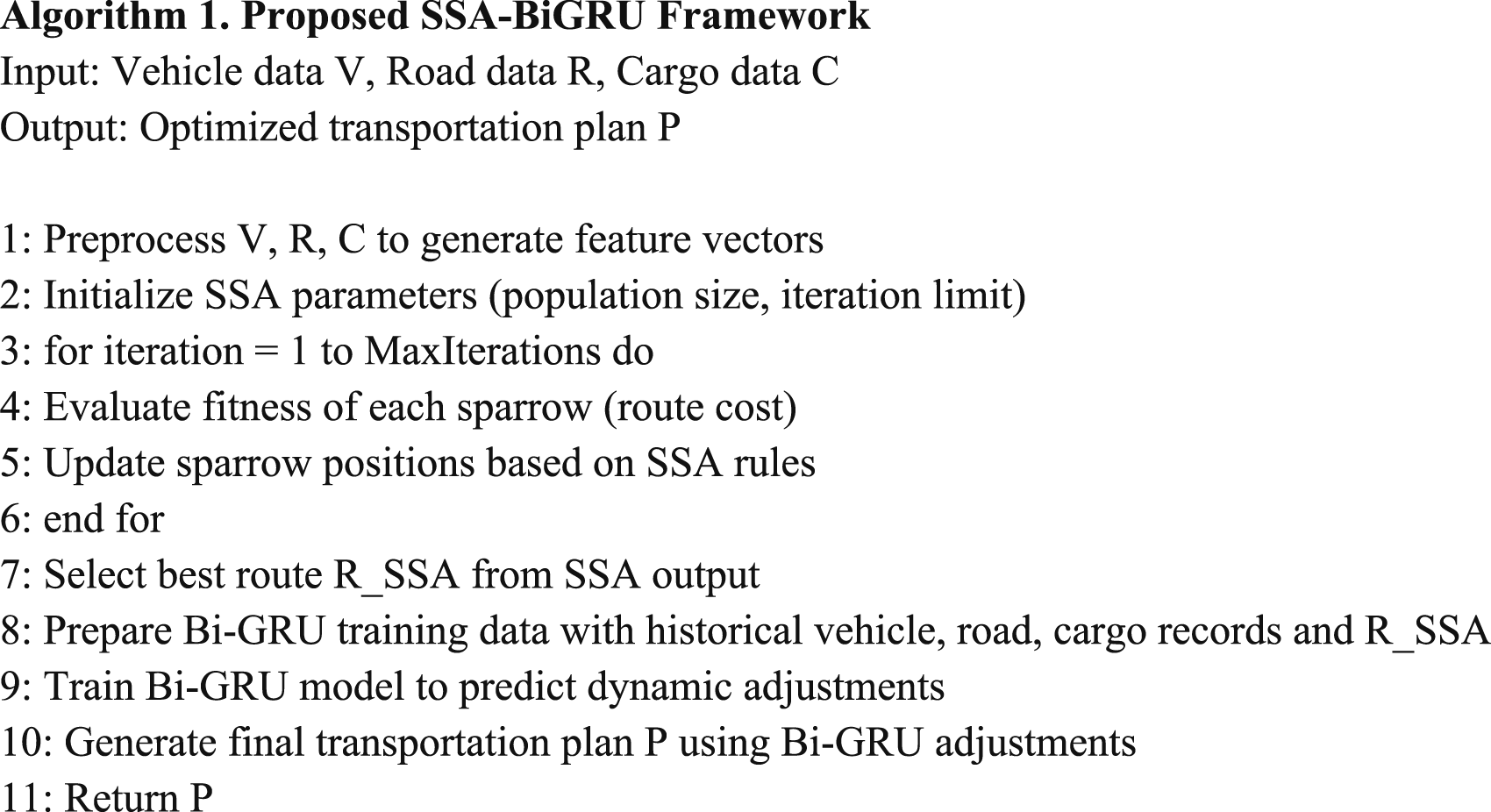
Algorithm 1 outlines the complete processing steps from data preprocessing, SSA-based static optimization, to Bi-GRU-based dynamic refinement. This formal description enhances reproducibility and implementation clarity.
Objective function definition
Bi-GRU leverages historical route data and real-time status to adjust SSA-generated routes, dynamically refining scheduling to adapt to temporal traffic patterns and vehicle performance variations. We define a clear objective function for the optimization process. The objective is to minimize both the transportation distance and the energy consumption of the logistics system, while considering practical constraints such as vehicle capacity and route congestion. The formal objective function is as follows:

For this study, both α and β are assumed to be positive constants, where their values are experimentally set to achieve a balance between the two objectives. Specifically, values for these weights may be adjusted based on the operation environment, such as the availability of electric vehicles or the distance between the source and destination. Sensitivity analysis was performed by varying α and β in the range [0.1, 0.9], showing optimal performance at α = 0.5 and β = 0.5, balancing distance and energy objectives.
Energy consumption (kW·h/kg) is calculated based on vehicle load, travel distance, and speed using the formula: EnergyConsumption = Load × Distance × Speed × EfficiencyFactor, where EfficiencyFactor is empirically determined based on vehicle specifications.
The formal multi-objective optimization problem is subject to several key operational constraints that reflect real-world logistics system requirements: Vehicle Capacity: Each vehicle is constrained by its maximum load capacity. This ensures that no vehicle is overloaded, which could lead to inefficiencies or safety hazards. Vehicle Speed: The speed of each vehicle is constrained by the maximum speed limit imposed on the roads within the logistics network. This constraint ensures that vehicles do not exceed safe operating speeds. Route Congestion: Vehicles must also avoid congestion on certain routes. The congestion level on a route should not exceed a certain threshold, which ensures smooth traffic flow and efficient route utilization. Time Window Constraints: For certain goods, there may be delivery time windows that must be respected. This constraint would ensure that each delivery is made within the acceptable time frame, adding another layer of complexity to the optimization problem.
Experiments and analysis
Experimental settings
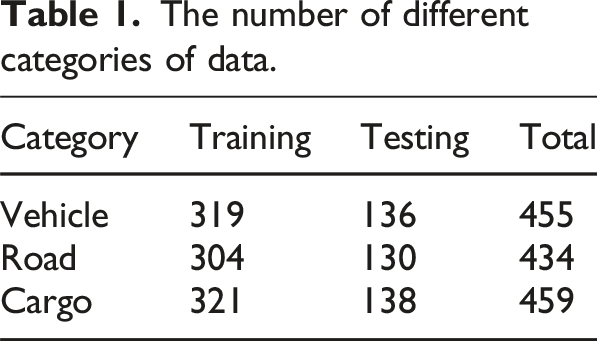
The number of different categories of data.
Hyperparameter choices for Bi-GRU.

The key hyperparameters for the SSA were selected through empirical experimentation and are in line with established practices for optimization algorithms. The population size was set to 50, which is a typical value for optimization tasks. The search depth was set to 10, as it was empirically determined that this depth offered a good balance between exploration of the search space and computational cost.
Results and analysis
To visually demonstrate the correlation between data, we employed the t-SNE algorithm to reduce the dimensionality of the preprocessed vectors, and the visualized outcome can be observed in Figure 3. Visualization of t-SNE results.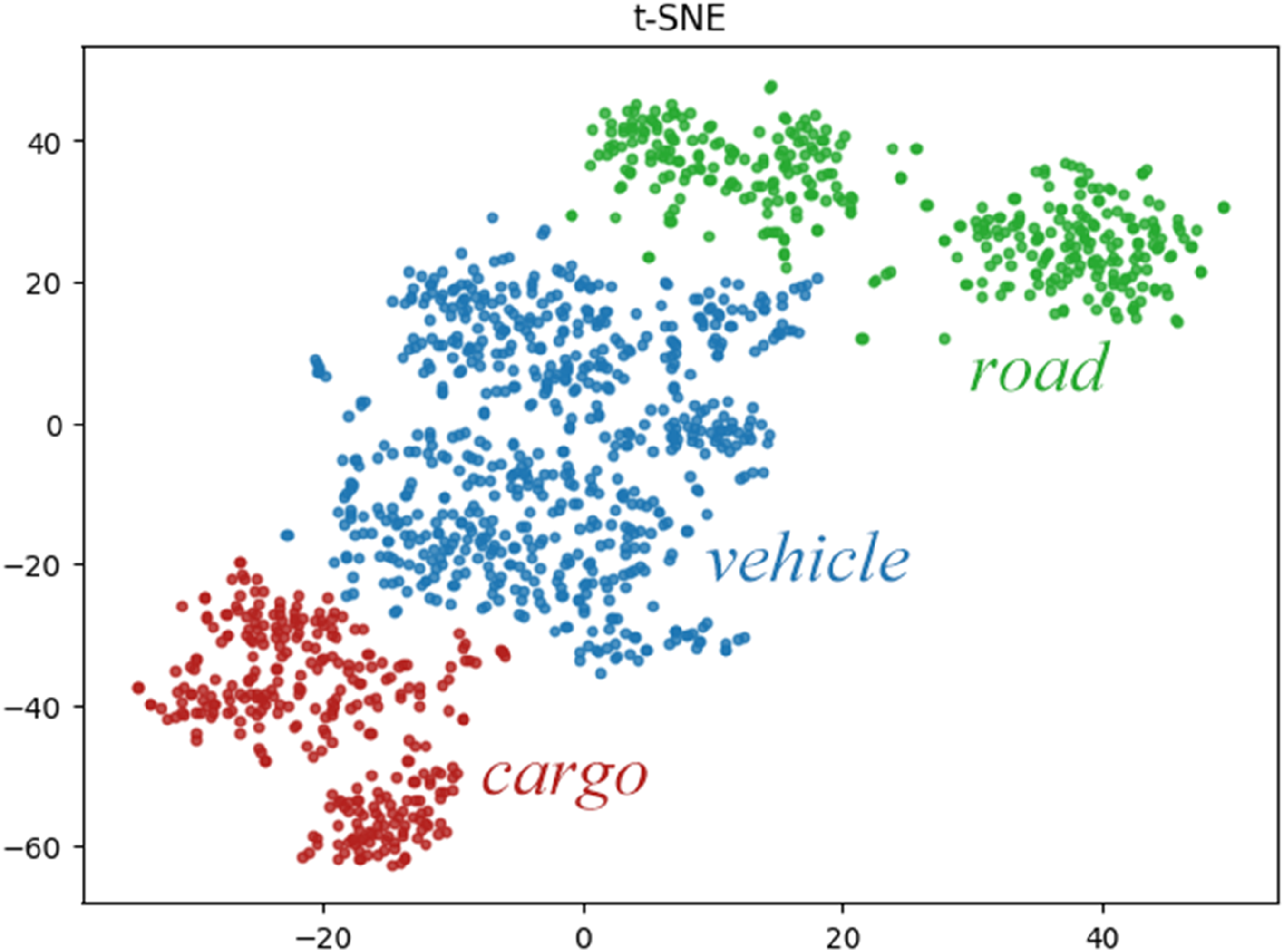
The t-SNE visualization presents the distribution of three distinct data categories: road, vehicle, and cargo. Each cluster is color-coded for clarity—green for road, blue for vehicle, and red for cargo. It is evident that the clusters are well-separated in the feature space, indicating that the categories are distinguishable based on their underlying characteristics. Interestingly, the vehicle data is positioned between the road and cargo clusters. This spatial relationship suggests that vehicular operations share features with both road and cargo data, positioning them as a bridging element in the dataset. The separation between road and cargo clusters further highlights the distinct nature of these two categories, reinforcing the intermediary role of vehicle data in connecting infrastructure and logistics.
The spatial separation of vehicle, road, and cargo features indicates their distinct contributions to the model. Such separability facilitates more effective learning in downstream optimization tasks, enhancing the model’s ability to differentiate and adjust route planning based on specific feature types.
Following data preprocessing, we fed the data into SSA for iterative analysis. For the initial phase of iterations, we set the number of iterations to 1000, based on considerations such as search space size, search algorithm efficiency, and available computational resources. Our aim was to obtain a shortened average unit weight cargo transport distance after 1000 iterations. Figure 4 displays the variation in the average unit weight cargo transport distance as the number of iterations increases. The change of average distance with iteration.
From the figure, it is evident that the historical transportation distance in the dataset averages at approximately 1.6 km. During the iterative process of the SSA, the simulated average transportation distance decreases as the number of iterations increases. At approximately 900 iterations, the average transportation distance stabilizes at around 1.02 km. Continuing the simulation beyond this point would result in diminishing marginal returns, that is, consuming significant computational resources while only marginally reducing the simulation results. Therefore, we have adopted the calculation results from 1000 iterations, which is approximately 1.02 km.
Subsequently, we trained the Bi-GRU model. The training set comprises the original vector information from the dataset and the optimized path information from the SSA. The loss function during the Bi-GRU model training process varies with the number of epochs, as shown in Figure 5. The change of loss function with epoch in training process.
From the figure, it is apparent that the value of the loss function during the model training decreases with an increase in the number of training epochs. Using randomized parameter initialization during the initial stages of training, the loss function value is significantly large, approximately 5.2. However, with an increase in the number of training epochs, the rate of descent is relatively swift, reaching a steady value at around 75 epochs, showing oscillation and potentially falling into a local optimum. At around 107 epochs, a slow decline is observed and reaches a relatively constant value at around 130 epochs, attaining the minimum value at 152 epochs. At this point, the model’s predictive classification performance is satisfactory. The training loss consistently decreases, but the validation loss begins to plateau after a certain number of epochs, indicating that the model might start overfitting to the training data after reaching a certain point. This is a common behavior when dealing with relatively small datasets. The final trained model achieved a training loss of 0.4038 kW·h/kg, and the validation loss stabilized around 0.4100 kW·h/kg after 152 epochs, indicating that the model’s performance on the validation set remained stable without significant overfitting. Both training and validation losses were monitored, showing similar trends and minimal overfitting. Multiple runs with different random seeds confirmed the stability of the results, with variance within ±0.005 kW·h/kg across five repetitions.
Iteration times and average energy consumption.
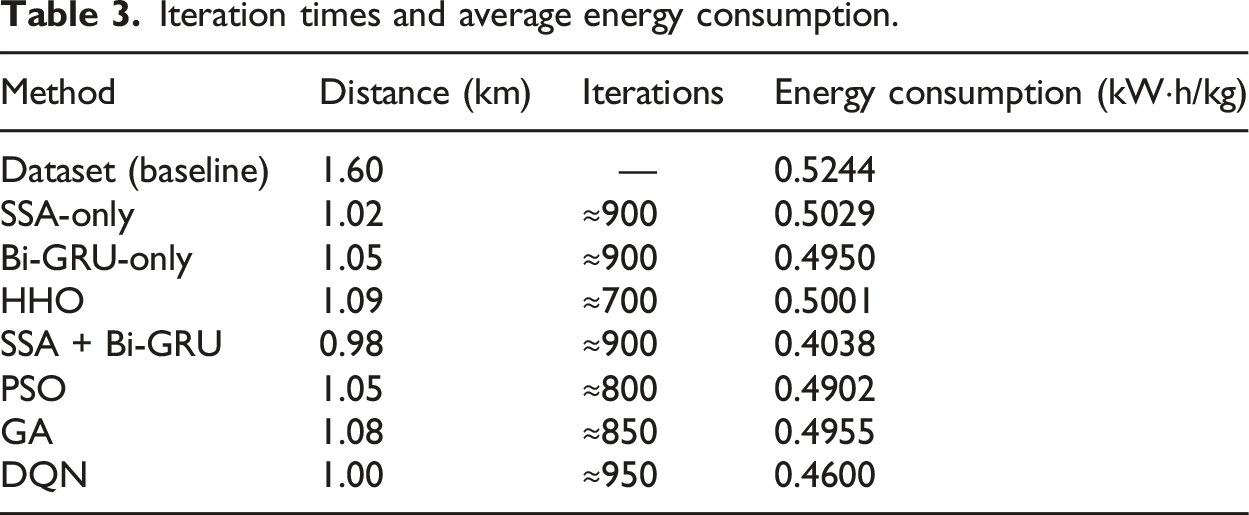
The incorporation of Particle Swarm Optimization (PSO), Genetic Algorithm (GA), and Deep Q-Networks (DQN) into the comparative analysis enhances the robustness of the evaluation by providing a broader spectrum of optimization methods for logistics route planning and energy consumption reduction. Table 2 presents the performance of three methods in optimizing logistics transportation routes and energy consumption. Both the Sparrow Search Algorithm (SSA) and the Harris Hawks Optimization Algorithm (HHO) can optimize routes based on historical data in the dataset. Compared to HHO, SSA produced better results with a longer iteration period, with an average transportation distance of 1.02 km after about 900 iterations. During SSA optimization, the algorithm reaches a plateau at approximately 900 iterations. This is due to diminishing returns, where further iterations yield marginal improvements in the average transportation distance. Beyond this point, the optimization process is computationally expensive without significantly enhancing the results. This saturation occurs as SSA sufficiently explores the global search space and its ability to find significantly better solutions diminishes. HHO, on the other hand, had fewer iterations, about 700, but was less effective than SSA, with an average transportation distance of 1.09 km after optimization. In contrast, SSA trained with Bi-GRU network yielded better optimization results with an average transportation distance of 0.98 km. In the Bi-GRU model, oscillations in the training curve were observed, particularly in the early epochs. These fluctuations are likely a result of suboptimal learning rates and random weight initialization. To alleviate this, we suggest employing adaptive learning rates, which may provide a more stable and faster convergence. Furthermore, while the model reaches a local minimum, further exploration of hyperparameter sensitivity, including learning rate and epoch count, is needed to refine model performance.
Table 3 additionally includes an ablation comparison of SSA-only, Bi-GRU-only, and SSA + Bi-GRU configurations to evaluate their individual contributions to optimization performance. The results show that SSA-only achieves a transportation distance of 1.02 km with an energy consumption of 0.5029 kW·h/kg, while Bi-GRU-only achieves a slightly longer distance of 1.05 km with an energy consumption of 0.4950 kW·h/kg. The combination of SSA and Bi-GRU further improves performance, reducing the distance to 0.98 km and the energy consumption to 0.4038 kW·h/kg. This demonstrates the complementary strengths of SSA’s global optimization capability and Bi-GRU’s temporal adjustment ability, confirming the advantage of the integrated approach over individual models.
The results in Table 2 demonstrate that the Sparrow Search Algorithm (SSA) outperforms PSO and GA in terms of both transportation distance and energy consumption, with the SSA achieving a 1.02 km transportation distance and 0.5029 kW·h/kg energy consumption. However, when SSA is combined with the Bidirectional Gated Recurrent Unit (Bi-GRU) model, the performance improves significantly, reducing the transportation distance further to 0.98 km and energy consumption to 0.4038 kW·h/kg. The SSA + Bi-GRU combination benefits from SSA’s global optimization capabilities and the dynamic, real-time adjustments made by Bi-GRU based on temporal data, resulting in enhanced efficiency in logistics operations. Although PSO and GA also exhibit competitive performance, they fall short in comparison to SSA + Bi-GRU, particularly in the areas of minimizing both transportation distance and energy consumption. DQN, despite its advantages in real-time decision-making, requires significantly more iterations, indicating higher computational cost and longer convergence time. Overall, the results highlight the superior efficacy of the SSA + Bi-GRU approach in optimizing logistics routes and minimizing energy consumption, making it a promising solution for green logistics in IoT-enabled smart city contexts (Figure 6). Comparison of different algorithms.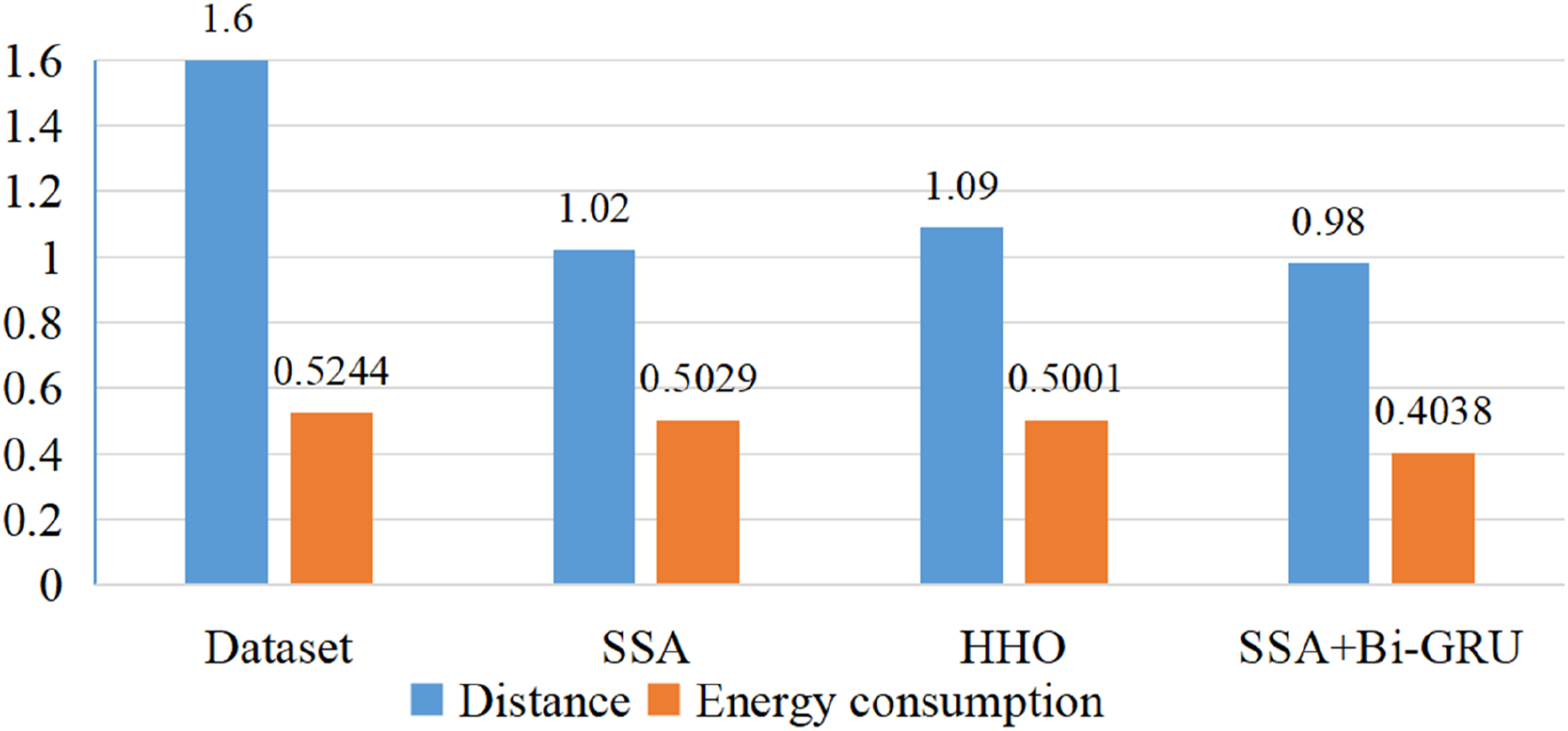
Discussion
In the current era of rapid development in artificial intelligence, with machine learning and deep learning as its representative technologies, researchers have widely applied artificial intelligence across various domains. Moreover, with the continuous development of modern logistics and transportation services, the optimization and scheduling of logistics transportation routes have become increasingly crucial. The application of Internet of Things (IoT) technology can provide a vast amount of real-time monitoring data, which offers more precise information support for optimizing and scheduling logistics transportation routes. 23
The proposed approach of utilizing monitoring information from IoT devices to optimize and schedule logistics transportation routes using SSA combined with the Bi-GRU model is a highly promising direction. In our experiments, we utilized Bi-GRU in conjunction with SSA for transportation route optimization. The results showed a significant improvement in comparison to SSA and HHO. After applying this method, the average transportation distance of goods was reduced to 0.98 km, and the overall energy consumption of the logistics system decreased to 0.4038 kW·h/kg. This approach boasts lower energy consumption and shorter transportation distances compared to other methods, making it an effective solution. The trained model can be used for transportation vehicle scheduling in logistics parks, assisting with daily operations.
By combining the Sparrow Search Algorithm with the Bi-GRU model, logistics transportation routes can be optimized and scheduled. Therefore, utilizing monitoring information from IoT devices with the Sparrow Search Algorithm combined with the Bi-GRU model for logistics transportation route optimization and scheduling exhibits excellent potential. By monitoring real-time data during logistics transportation, problems can be promptly identified and measures taken to optimize and adjust logistics transportation, thereby improving efficiency and safety. Moreover, combining SSA and the Bi-GRU model can reduce goods’ dwell time and transportation costs and increase customer satisfaction. 24
In addition, with the continuous advancement of the Internet of Things (IoT) technology, the quantity and variety of IoT devices are constantly increasing. This will provide more abundant and precise data for optimizing and scheduling logistics transportation routes based on the Sparrow Search Algorithm combined with the Bi-GRU model using IoT monitoring information. Furthermore, this will further enhance the accuracy and effectiveness of the optimization and scheduling. 25
While our model effectively minimizes both route distance and energy consumption, we recognize that these objectives may conflict with minimizing scheduling delays, which are crucial in time-sensitive logistics operations. Currently, our model does not explicitly account for scheduling delays, and as such, a trade-off between these objectives may arise. Future work could explore multi-objective optimization strategies, which would allow for simultaneous consideration of route optimization, energy consumption, and scheduling delays, thereby providing a more comprehensive solution for logistics management in dynamic environments.
It should be noted that the model in this study has been evaluated based on static historical data, with a focus on optimizing logistics routes from historical records. However, it has not yet been evaluated under dynamic real-time traffic conditions where variables such as traffic congestion, vehicle breakdowns, and sudden environmental changes fluctuate. Future work will focus on expanding the model’s capabilities to incorporate real-time data to enhance its robustness in dynamic environments.
Conclusion
This paper primarily investigates the SSA combined with Bi-GRU model based on the information collected by IoT devices, and discusses the prospects of this method in practical applications. We have constructed a transportation route optimization algorithm for logistics parks based on deep learning methods, and verified its effectiveness through relevant comparative experiments. The experiments were conducted on a historical dataset collected by IoT devices, and the results show that the proposed method outperforms other models in terms of route planning and energy consumption optimization, reducing the average transportation distance of goods to 0.98 km and the overall average energy consumption of the logistics system to 0.4038 kW·h/kg. This method can assist in the safe and stable operation of logistics systems in practical applications.
The paper focuses on route planning and energy consumption problems in actual logistics scenarios. Given the characteristics of IoT devices that can be deployed in specific areas, this paper monitors the logistics transportation status based on the information obtained from IoT devices, and schedules transportation vehicles according to the current status. However, there are still some limitations to this research. The data sample collected in this study is relatively small, and we only simulated and predicted the results using historical data. Therefore, more extensive testing and further research are required for large-scale route planning and monitoring tasks. In addition, we need to consider a series of technical and legal issues, such as privacy protection and data security, when applying this method in practice. Future research can further explore the optimization effect in multi-type cargo transportation.
Footnotes
Acknowledgments
I thank the anonymous reviewers whose comments and suggestions helped to improve the manuscript.
Author contributions
Xiaoxi Xia designed the study and produced the manuscript.
Funding
The author received no financial support for the research, authorship, and/or publication of this article.
Declaration of conflicting interests
The author declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.