
Abstract
In this study, we analyze the behavior of a damped parametric oscillator, incorporating a damping factor to examine its influence on system dynamics. We derive the equation of motion using the Lagrangian formulation and the Euler–Lagrange equation, which leads to a nonlinear differential equation governing the system’s motion. The equation is solved numerically using the 4th-order Runge-Kutta method and analytically using the Multistep Differential Transformation Method (MS-DTM), which provides an efficient and accurate approximation. The results obtained from MS-DTM are in good agreement with the numerical solutions, demonstrating its capability to capture the system’s dynamics with reduced computational effort. By analyzing two distinct scenarios—one with a small damping coefficient (β = 0.01) and the other with a larger damping coefficient (β = 0.5)—we observe that the damping parameter significantly influences system behavior. Specifically, in the first scenario, the system exhibits stable damped harmonic motion with constant energy, while in the second scenario, the system experiences energy dissipation and becomes unstable. This study highlights the critical role of damping in determining the system’s stability and energy dissipation, showcasing the effectiveness of both MS-DTM and numerical methods in analyzing nonlinear oscillatory systems.
Introduction
Oscillatory systems are fundamental in many areas of physics, including both classical and quantum mechanics. One particularly significant class of oscillators is the damped parametric oscillator, where the interplay between damping forces and parametric excitation introduces a rich variety of dynamic behaviors. These systems, which involve periodic variations in parameters such as frequency or amplitude, are found in numerous applications across physics and engineering. For example, damping forces dissipate energy over time, while parametric excitation, such as a varying spring constant, can drive the system in complex ways. Understanding the behavior of such systems is critical in contexts where energy input and dissipation govern the system’s evolution.1–3
Parametric oscillators have been extensively studied due to their rich dynamical behavior, with the Kapitza pendulum serving as a paradigmatic example. In this system, a rigid pendulum with a rapidly oscillating suspension point exhibits counterintuitive stabilization of the inverted position due to high-frequency excitation. This phenomenon, known as dynamic stabilization, exemplifies how periodic forcing can profoundly alter the stability landscape of nonlinear systems and motivates the broader study of parametric excitation in damped oscillators.
While exact analytical solutions for nonlinear oscillators are often not feasible, several methods have been developed to approximate solutions and provide insight into system behavior. One such approach is the Multistep Differential Transformation Method (MS-DTM), which is particularly effective for solving nonlinear differential equations. MS-DTM has proven successful in a variety of contexts, including nonlinear oscillators, where it provides accurate approximations while reducing computational complexity compared to traditional numerical methods like the 4th-order Runge-Kutta (RK4) method. Previous studies have demonstrated MS-DTM’s utility in systems with strong nonlinearities, such as the analysis of asymmetric oscillators and oscillators with time-dependent parameters.4–7
On the other hand, the reproducing kernel Hilbert space method is applied to solve integrodifferential and differential-algebraic systems with temporal boundary conditions, ensuring both numerical and theoretical accuracy. The approach constructs smooth kernel functions to satisfy system constraints and efficiently obtain grid points. Numerical examples illustrate its simplicity, effectiveness, and wide applicability in scientific computations.8,9
Among available techniques for solving nonlinear differential equations, the Multistep Differential Transformation Method (MS-DTM) stands out due to its ability to generate approximate analytical solutions in a piecewise manner with improved convergence properties. Unlike perturbation methods or standard differential transforms, MS-DTM handles strong nonlinearities and time-varying parameters without requiring linearization or small parameter assumptions. 10 Moreover, it avoids cumulative truncation errors by segmenting the time domain, making it particularly effective for long-term simulations of nonlinear systems with damping and periodic forcing. In contrast, the 4th-order Runge-Kutta method provides high-accuracy numerical results but offers no symbolic insight into system behavior. The synergy between MS-DTM’s semi-analytical structure and the numerical robustness of the Runge-Kutta method allows for both the interpretability and verification of complex dynamical features in the system. 11
In this paper, we focus on the damped parametric oscillator by incorporating a damping term into the equation of motion to model the effects of energy dissipation. We present a detailed analysis of the system’s behavior using two methods: MS-DTM for an approximate analytical solution and the 4th-order Runge-Kutta method for numerical simulation. The results reveal how variations in the damping coefficient affect the system’s stability and energy dissipation. Specifically, we investigate two scenarios: one with a small damping coefficient (β = 0.01) exhibiting stable damped harmonic motion, and another with a larger damping coefficient (β = 0.5) where the system experiences instability and energy loss. These findings provide a deeper understanding of how damping influences system behavior and stability.
The motivation behind this study is to explore the impact of damping on the dynamics of parametric oscillators and to assess the accuracy and efficiency of MS-DTM in capturing these dynamics compared to traditional numerical methods. We aim to contribute to the broader understanding of nonlinear oscillators by applying MS-DTM to a damped parametric system and demonstrating its effectiveness in modeling complex behaviors.
In addition to numerical and approximate analytical techniques, the stability characteristics of the system can be rigorously examined using Floquet theory, which is particularly suitable for differential equations with periodic coefficients. By analyzing the monodromy matrix and computing the associated Floquet multipliers, one can determine whether small perturbations to the periodic solution grow or decay over time.12–14 This theoretical framework is especially relevant in the context of the damped parametric oscillator, where time-periodic forcing may induce regions of instability or resonance. The incorporation of Floquet analysis thus provides a deeper understanding of how damping and parametric excitation interact to influence the system’s long-term behavior, complementing the insights obtained via numerical integration and the Multistep Differential Transformation Method (MS-DTM).15,16
This paper is structured as follows: Section 2 derives the equations of motion using the Euler–Lagrange equation, establishing the theoretical foundation of the system. Section 3 introduces MS-DTM and applies it to solve the equation of motion analytically, while Section 3.1 extends the analysis by incorporating Floquet theory to investigate the stability of periodic solutions via the monodromy matrix and Floquet multipliers. This provides a rigorous theoretical framework that complements the approximate analytical solution and highlights the critical influence of the damping and modulation parameters on the system’s stability. Section 4 provides an overview of the 4th-order Runge-Kutta method and its numerical implementation. Section 5 compares the results from MS-DTM with those obtained from the Runge-Kutta method, while Section 6 summarizes the findings and discusses the significance of parameter selection in determining system stability and energy dissipation.
Physical description of the damping parametric pendulum
Consider a point mass ( The driven parametric pendulum.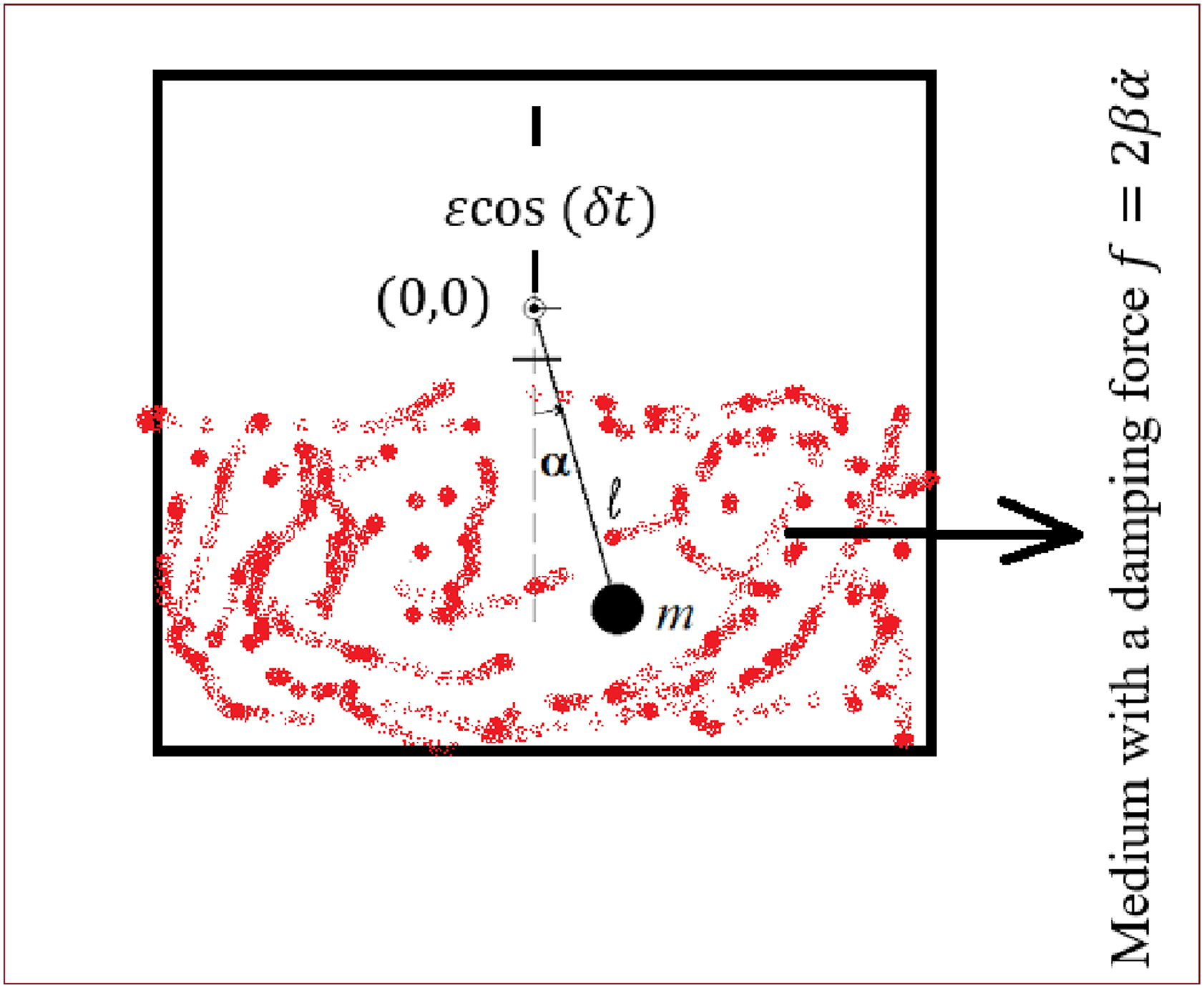
Our first objective is to formulate the Lagrangian (
The coordinates of the mass (


Since


Thus,


Secondly, the equation of motion (EOM) or the Euler- Lagrange Equation (ELE) can be derived by substituting (5) into the relation

Adding the damping force to (6), we got:

Multi step differential transformation method
In this section we will obtain an approximate solution of the equation (7) using the MS-DTM. The study of an approximate solution for the Damped Parametric Oscillator using the Multistep Differential Transformation Method (MS-DTM) focuses on improving the accuracy and efficiency of solving nonlinear differential equations. MS-DTM breaks the problem into smaller intervals, applying the differential transformation method iteratively over each step to approximate the solution. This technique effectively handles the damping effects and time-dependent parameters of the oscillator, providing a reliable method for capturing the dynamic behavior of the system while reducing computational complexity compared to traditional methods. The MS-DTM approach is particularly advantageous over standard Differential Transformation Methods (DTM) due to its multistep structure, which mitigates divergence and improves accuracy in systems with stiff behavior or strong damping. This makes MS-DTM suitable for capturing the transient and steady-state behavior of damped parametric oscillators over extended time intervals.
Based on
17
the differential transform of the functions that are encountered in the equation (7) will lead us to the following recurrent relation:

In the above equation we used the following differential transform formulas: • for the function • for the function • for the function • for the product
Therefore the recurrent relation (1) will have the following form:

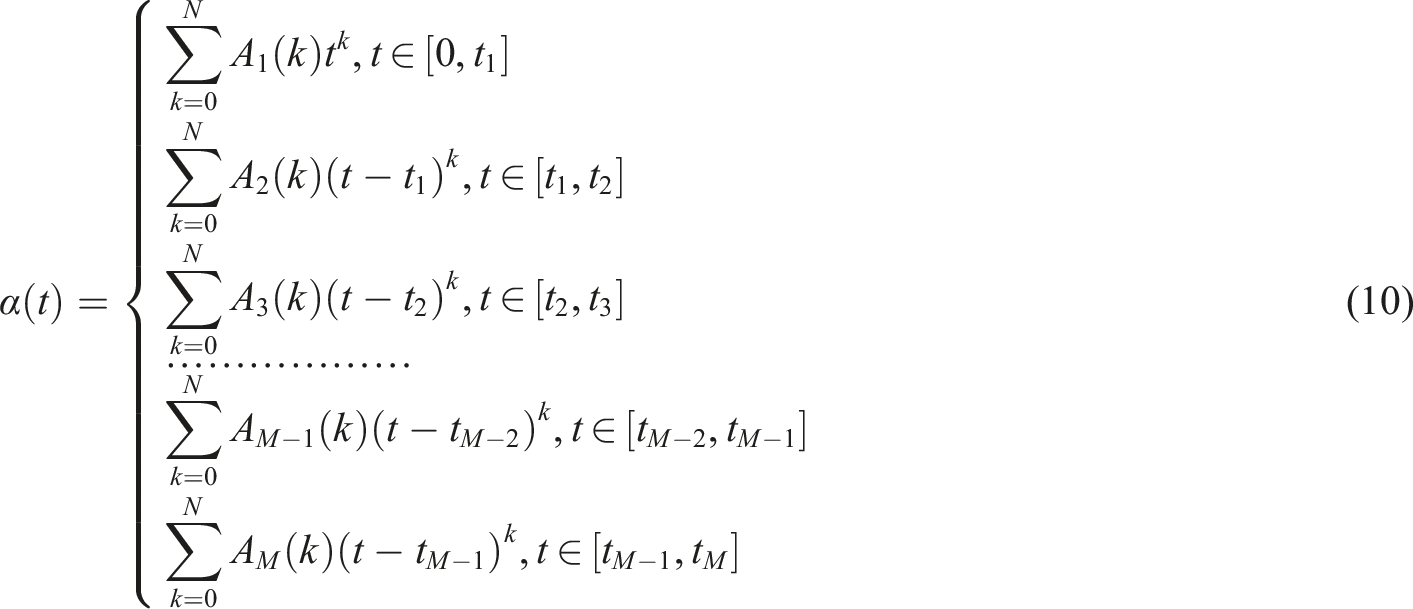
The application of MS-DTM method allows us to express the approximate solution as follows:

The detailed algorithm of the differential transformation method given above with mathematical formulas is essentially carried out with the following process steps.
Algorithm: Step 1: Apply differential transformation to both sides of a differential equation. Step 2: Convert the differential equation into an algebraic equation. Step 3: The algebraic equation is solved for the transform of the unknown function. Step 4: The inverse differential transformation is applied to both sides of the solved equation. Step 5: Thus, yielding the solution to the differential equation.
Stability analysis using Floquet theory
To complement the analytical and numerical insights into the behavior of the damped parametric oscillator, we invoke concepts from Floquet theory to assess the stability of periodic solutions. Floquet theory is particularly effective for studying linear differential equations with time-periodic coefficients, such as those found in parametrically excited systems. 10
We consider the governing equation derived via the Euler–Lagrange formalism:

We first convert the second-order ODE into a first-order system:

Let • If • If • If

The Floquet multipliers are related to the Floquet exponents

In practical terms, we can numerically integrate the linearized system over one period
Numerical solution
Equation (7) is a nonlinear differential equation. In this section, our goal is to solve it numerically using the 4th-order Runge-Kutta method. This method is commonly employed to solve initial value problems for differential equations, as described in 18:

Its formula is:



Here, we considered
This formula determines the next value
The 4th has a truncation error is on the order
For a higher order differential equation
To solve this we must assume:
Then we can solve the problem using two formulas of the RK 4th method.









Results and discussion
Here we apply 4th-order Runge- Kutta to equation (7). We will consider two cases:
Case one
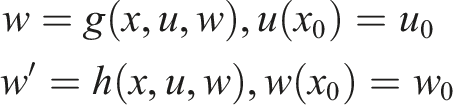
Using the following parameters: β = 0.01, Variation of angular displacement (a) 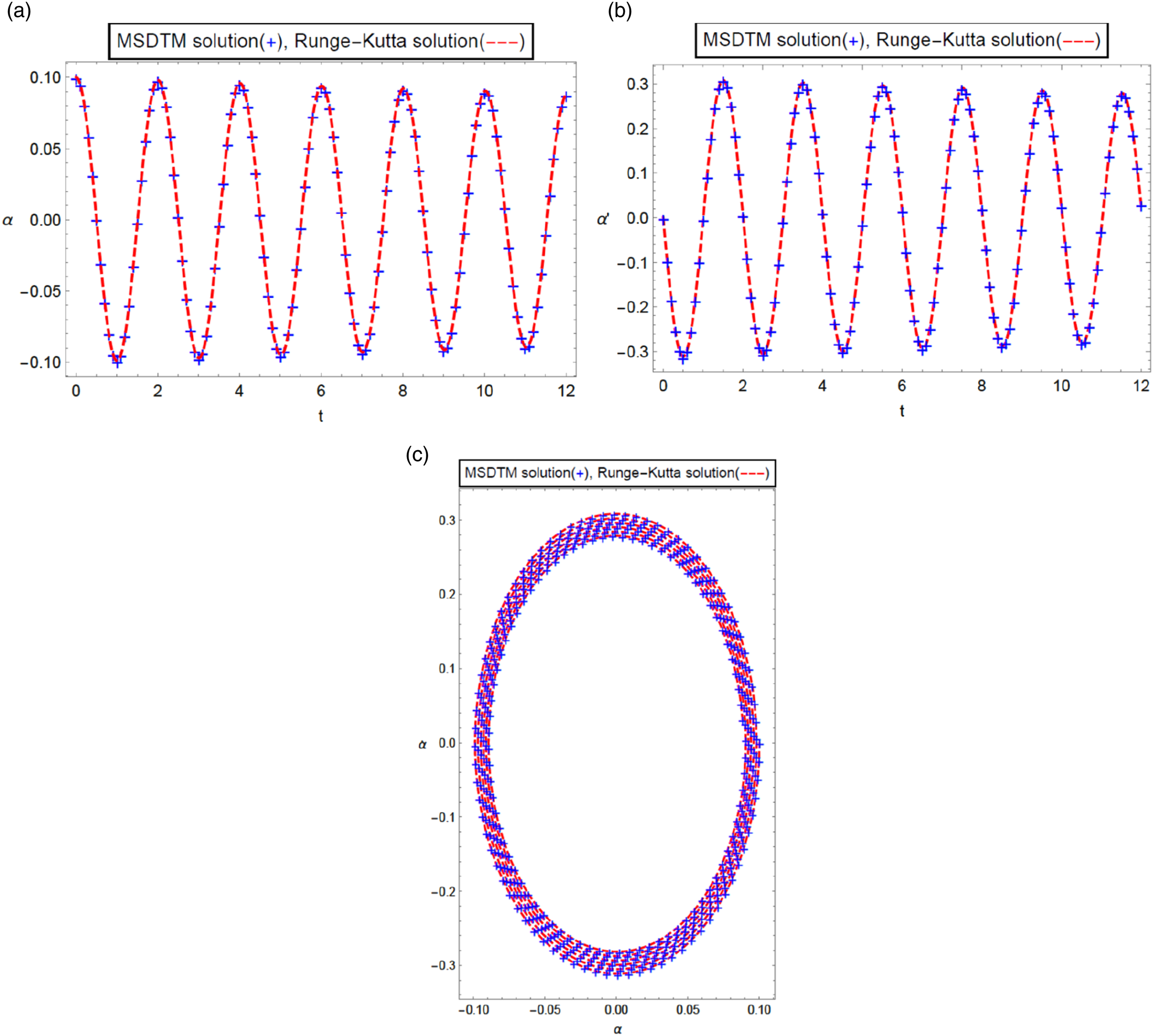
Absolute errors between MS-DTM and RK4 solutions for case one.
Case two
Using the following parameters: β = 0.5, l = 1, g = 9.81, γ = 0.1, and δ = 0.5, with initial conditions α(0) = 0.1 and 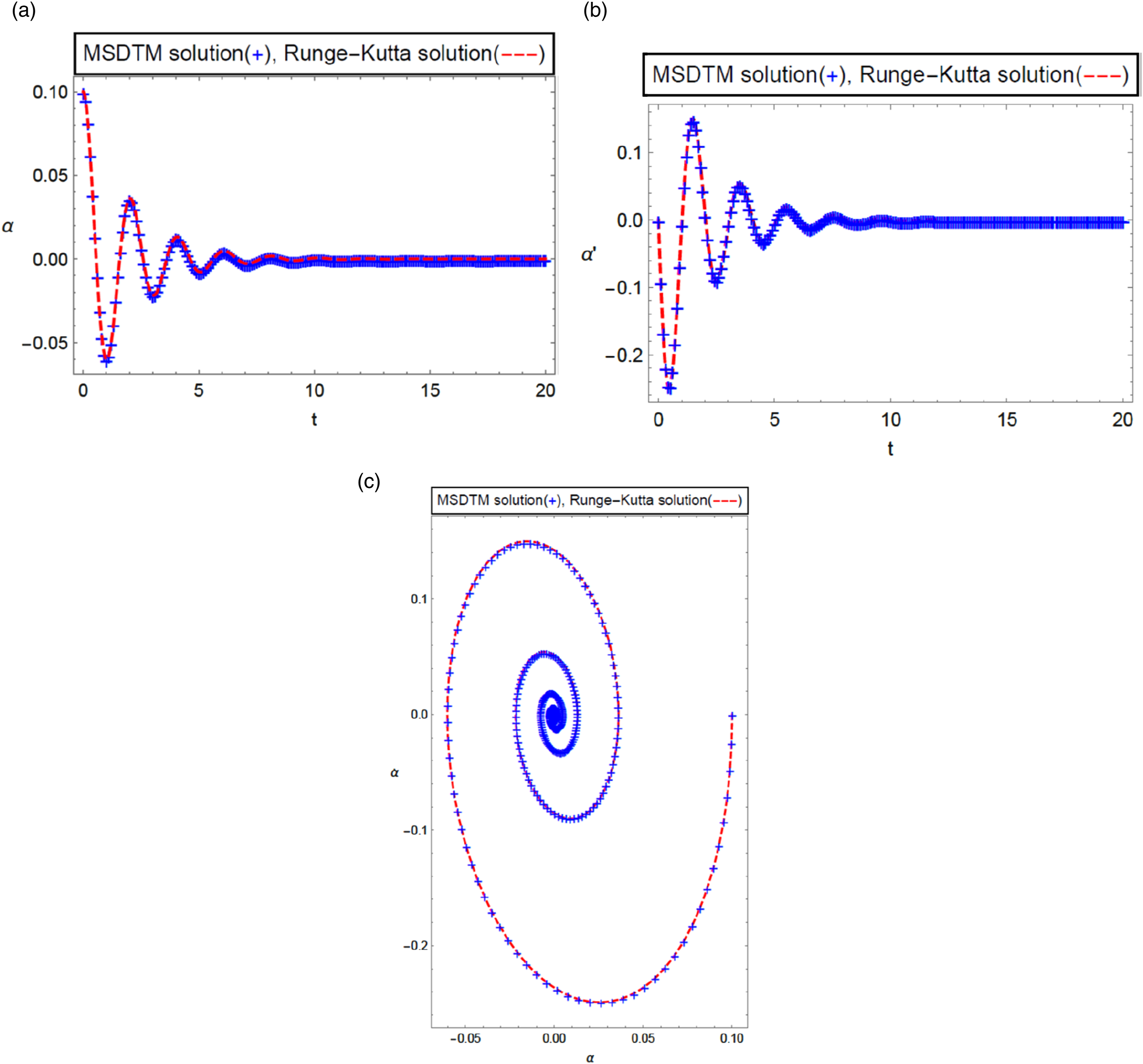
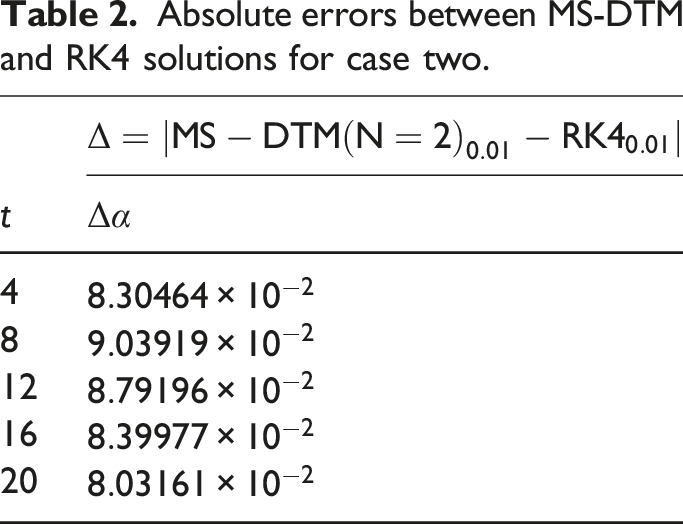
Absolute errors between MS-DTM and RK4 solutions for case two.
Conclusion
This study investigates the dynamics of a damped parametric pendulum modeled by a nonlinear differential equation, focusing on the effects of damping and parameter variations on system behavior. We applied the Multistep Differential Transformation Method (MS-DTM) to obtain an approximate analytical solution, demonstrating its effectiveness in capturing the system’s dynamic response, particularly in handling time-dependent parameters and damping effects. The MS-DTM solutions showed excellent agreement with the numerical results, confirming its utility as an efficient tool for analyzing nonlinear oscillatory systems with reduced computational effort. Unlike prior studies that focused primarily on undamped or weakly damped cases, our work explicitly considers both low and high damping regimes and evaluates MS-DTM’s robustness in these distinct scenarios.
We then performed a numerical analysis using the 4th-order Runge-Kutta method to further examine the system’s behavior under two different damping scenarios. In the first scenario, with a small damping coefficient (β = 0.01), the system exhibited stable damped harmonic motion, with a closed elliptical phase portrait indicating constant energy. In contrast, in the second scenario with a larger damping coefficient (β = 0.5), the system lost energy over time and became unstable, reflected in the open elliptical phase portrait. These findings demonstrate the substantial impact of damping parameters on system stability, energy dissipation, and overall dynamic behavior.
Another key contribution of this study is the inclusion of Floquet theory to assess the stability of the system under periodic excitation, which provides a rigorous theoretical framework rarely applied in conjunction with MS-DTM. This analytical addition strengthens the understanding of stability boundaries and complements both the approximate and numerical results.
The combined use of MS-DTM and numerical methods highlights the complementary nature of these approaches in studying nonlinear oscillators. Our results highlight the crucial role of damping in determining the system’s stability and behavior, underscoring the potential of MS-DTM as a viable alternative to traditional numerical methods for analyzing complex dynamical systems. Taken together, the novelty of this study lies in the integration of MS-DTM with Floquet-based stability analysis under realistic damping conditions, offering both methodological innovation and physical insight into parametrically driven oscillators.
The study demonstrates that MS-DTM not only reduces computational effort but also preserves essential dynamical features through an analytical formulation that is not achievable with purely numerical schemes. The complementary use of MS-DTM and Runge-Kutta thus bridges symbolic interpretability and numerical precision, approaching well-suited for complex nonlinear oscillatory models.19–31
Footnotes
Acknowledgments
The authors Rabab Jarrar, and Jihad Asad would like to thank Palestine Technical University- Kadoorie for supporting them during this research.
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.