
Abstract
To provide tourists with more personalized scenic spot route planning scheme, this study combines multi-dimensional information and A* algorithm to construct an improved intelligent scenic spot route planning model. The model first introduces multi-dimensional environmental semantic information such as terrain undulation, tourist density, emergency events, and popularity of scenic spots, and then constructs an improved dynamic road network data model. Then, the A* algorithm is improved using the lightning search algorithm to improve the dynamic path planning capability. Empirical analysis is conducted on the intelligent planning model for tourist attraction routes constructed. The planned scenic spot route had 5 turning points, with a total length of 0.9 km. It was smoother than that of other models and better meets the planning requirements for the shortest path. When the iteration was 15, it entered the convergence stage and the execution time was 2.8 s, which was significantly lower than the execution time of other models. The tourist satisfaction score was 9.4 points, and the expert satisfaction score was 8.9 points. It was higher than the satisfaction scores of other models and better meets the actual needs. Based on the above results, the intelligent planning model for tourist attractions based on heuristic search algorithms has better performance than other comparative methods, providing tourists with a more personalized travel experience and promoting the tourism industry towards a more intelligent and sustainable direction.
Keywords
Introduction
With the gradual improvement of material conditions, the demand for spiritual life has also been increasing. Tourism has also become one of the best choices for people to enrich their spiritual life at present. 1 However, there are numerous tourist attractions and high foot traffic, and different tourists have different needs for tourism. Therefore, providing personalized tourist attractions and planning routes to meet the needs of different tourists, improving their travel experience and time utilization efficiency, has become an urgent need to be met. The traditional planning methods mainly rely on manual experience, making it difficult to fully consider tourist preferences, physical limitations, and the condition of the attractions. 2 Current research on intelligent path planning methods mostly focuses on urban path planning, and the navigation of scenic spots is relatively weak. Scenic spots have slow development in path planning due to their unique geographical environment and variable factors. When people travel in scenic spots, they not only need to consider two-dimensional surface data at the geographical level, but also need to consider different semantic information such as three-dimensional terrain and the crowding degree in scenic spots. These semantic information are not limited to static but also have many dynamic semantic information. In response to these problems encountered during the tourism process mentioned above, the path navigation solution suitable for cities seems inadequate. Therefore, there is an urgent need for a solution suitable for dynamic path planning of scenic spots to solve these problems. The A-Star (A*) algorithm, as a heuristic search algorithm, can find the best path in graphic structure search problems. 3 The A* algorithm can improve search efficiency through heuristic functions which has superior performance in finding solutions to complex problems, making it widely used in path planning.4,5 The scenic area environment contains multi-dimensional data, such as the actual situation of the scenic spot path, the fluctuation of the path, and the flow of people. The A* algorithm is introduced into scenic spot route planning, comprehensively considering the multi-dimensional semantics of the scenic spot environment. It can effectively improve the efficiency and quality of planning, while meeting the personalized and diverse needs of tourists. 6
With the advancement of computer technology, the A* algorithm is currently widely used in various fields. The application effect of image mosaic technology in dynamic objects is poor, which it is prone to ghosting and parallax effects. Therefore, Laarousi et al. designed a dynamic object denoising method based on the A*. Compared with other comparative algorithms, this method can better obtain the stitching lines of the image stitching area, achieving stitching and artifact denoising. 7 To realize collision free multi-robot path planning, Garcia et al. combined the optimization ability of A* with the search ability of coevolutionary algorithm to build a collision free multi-robot path planning management model. The effectiveness of the model was verified. The model could generate paths based on obstacles in real time. It was feasible on edge computing devices. 8 To achieve agile development and automated programming of robot palletizing units, André et al. proposed an automatic offline programming tool for robots based on the A* algorithm. This tool had better performance than other tools. It also included a trajectory planner, which could achieve collision free robot trajectory automatic development. 9 To improve the search priority of path finding algorithms, Ogata et al. proposed a path formal specification checking technique based on conditional constraints and A* algorithm. The effectiveness of this technique was verified, which was a formal and standardized universal method for path finding algorithms. 10 To achieve location-based personalized route recommendation, Wang et al. proposed a personalized path recommendation model based on the A* algorithm. This model had better effectiveness and robustness than other models. 11
With the progress of society, there is currently an increasing amount of research on path planning methods. To achieve path planning in hilly areas, Liu et al. designed a simulated annealing path planning algorithm based on mixed local search. This algorithm aimed to minimize energy consumption, record the import and export of motion in hilly and mountainous areas, and select the optimal sequence for connection. This algorithm had lower energy consumption for path planning compared with other algorithms. 12 To achieve autonomous navigation and exploration of six groups of robots, Wang et al. developed an improved A* algorithm based on artificial potential field factors. The improved algorithm was applied to robot path planning. This algorithm could overcome the security and smoothness issues of traditional path planning methods, having practical application value. 13 Palanisamy et al. proposed a hybrid multi-objective path planning model to address the slow response, long planning, large turning, and insecurity in traditional mobile robot path planning systems. The planned route was shorter, smoother, and safer than traditional methods, making it suitable for mobile robot navigation in dynamic environments. 14 To achieve path planning for aircraft carrier tiltrotor, Wu et al. developed a path planning algorithm based on pigeon inspired optimization. The tiltrotor reached the target point with a reasonable landing path. It could solve the online path planning. 15 To assist underwater robots in safely avoiding large volume obstacles, Liu et al. proposed an artificial potential field model predictive control path planning method based on obstacle constraints. It could avoid large obstacles, which had practical application value. 16
In terms of scenic spot path planning, to better leverage new media in intelligent scenic area navigation systems, Zhang et al. integrated computer technology into various parts of the navigation system to build an intelligent tourism system. This system could establish multi-dimensional interaction with tourists, provide personalized scenic spot route planning services for tourists, and optimize the tourism information experience mode. 17 To improve the service quality of boutique tourist attractions, Cheng et al. used interactive multi criteria decision-making to achieve personalized tourist attraction path planning for tourists. This method had certain practicality and effectiveness. 18 To provide tourists with practical and feasible travel routes, Huang et al. constructed a multi-task deep travel route planning framework by considering tourist interests, user preferences, and historical route data, which had flexibility and superiority. 19
In summary, although the current path planning algorithm has been relatively advanced, it still has much space for development. Most of the current path planning algorithm is still focused on the static path planning algorithm. For the dynamic path planning algorithm, domestic and foreign researchers have relatively little research. Research on A* heuristic search algorithms and path planning is becoming increasingly mature. However, there is still limited research on combining A* algorithm with multi-dimensional data and applying it to personalized path planning in scenic areas. Moreover, traditional intelligent planning methods for tourist attractions often suffer from low efficiency and inability to quickly provide optimal solutions when dealing with path planning for large-scale scenic spots. To combine personalized services, multi-dimensional interactive experiences, and deep planning frameworks, and provide tourists with more personalized, flexible, and superior scenic spot route planning solutions, and improve their tourism experience and satisfaction, an intelligent planning model for scenic spot routes based on heuristic search algorithms and multi-dimensional data is constructed to improve the travel experience for tourists. To provide tourists with high-quality and highly flexible scenic spot route planning solutions, an intelligent planning method for scenic spot routes based on heuristic search algorithms and multi-dimensional data is proposed to improve tourist satisfaction and travel experience. A dynamic road network data model is constructed to accurately reflect the road conditions and the scenic spots, and A* is optimized with the lightning search algorithm to realize the dynamic planning of tourist path. The innovation of scenic spot route planning based on A* heuristic search lies in combining personalized services, multi-dimensional interactive experience, and deep planning framework, providing tourists with more personalized, flexible, and superior scenic spot route planning solutions, which can improve their travel experience and satisfaction. The contribution of this study is to provide effective and feasible intelligent planning methods for tourists’ tourist route planning, and offer a more scientific path planning basis for scenic spot managers, so as to promote the development of tourism.
Construction of intelligent planning model for scenic spot routes
To improve the experience of tourists in scenic areas, a Dynamic Road Network Data Model (DRND) based on weight allocation and multi-dimensional data is constructed, as well as a dynamic path planning algorithm based on A*. Subsequently, the two are integrated to construct an intelligent planning model for scenic spot routes, which outputs personalized scenic spot route plans.
Dynamic road network data model based on multi-dimensional data
The road network data model is used to describe and represent the data structure and relationships of the road network, which includes information such as roads, intersections, road attributes, etc. Traditional road network data models can be divided into static road network data models, real-time road network data models, and road element modeling of road network data.
20
However, due to the complex and ever-changing environment of scenic spots, traditional road network data models cannot meet their actual needs. For example, the study analyzes the main needs of current tourists for scenic spot route planning through field investigation, including safety and comfort. Static path data planning models cannot effectively plan according to different tourist needs.21,22 The real-time path data model currently mainly focuses on the road data model, which cannot adjust the path in real-time according to the changes of scenic roads and popular attractions.23–25 Based on this, a DRND is proposed to timely reflect changes in road conditions and the popularity of scenic spots within the scenic area. Road network data is represented through graph theory. It is mainly presented in adjacency matrices, adjacency tables, adjacency multiple tables, and cross-linked lists. The adjacency table is used as a representation of dynamic road network data. The adjacency table structure is shown in Figure 1. Adjacency table structure. Note. The data in the table has no practical meaning and is only for illustration.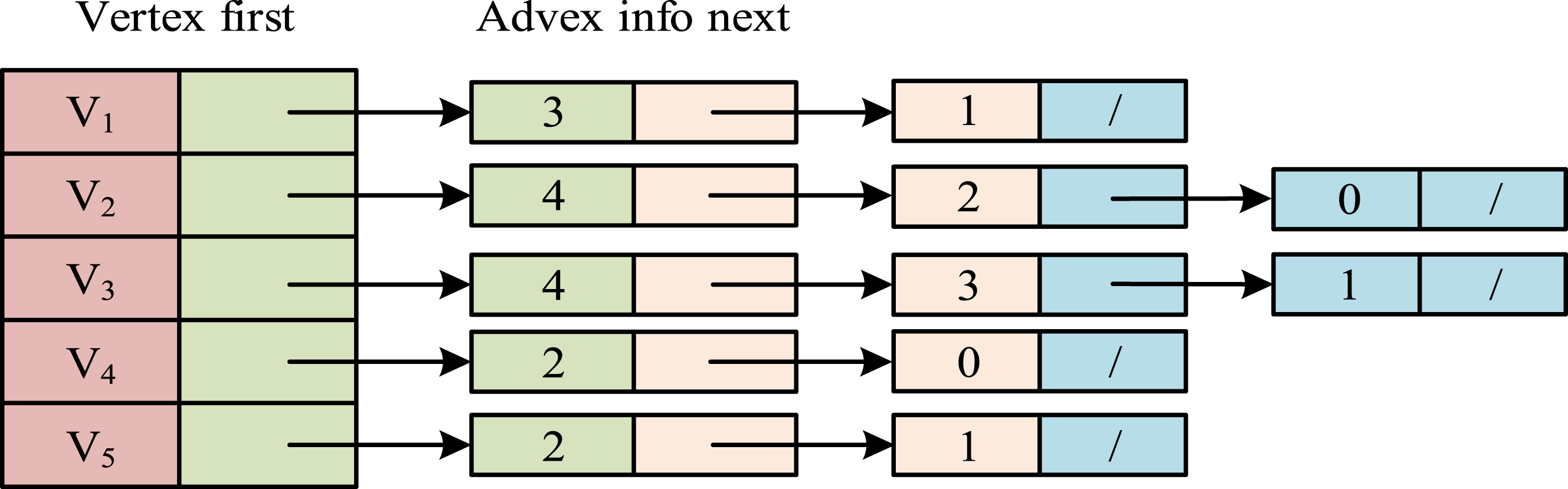
In Figure 1, the adjacency table consists of node data and a linked list. The node data is used to store all nodes in the graph. Each node contains a pointer to the linked list. This linked list stores all nodes adjacent to the node, used to store edge information in the graph. Each node in the linked list contains a pointer to adjacent nodes, as well as possible other attributes such as edge weights. Due to its ease of adding, deleting, or modifying nodes and edges, adjacency tables have good applicability in dynamic road network diagrams. Therefore, this study takes adjacency tables as a framework for representing road network data in scenic areas. In addition, the study also comprehensively considers the multi-dimensional environmental semantics of scenic spots to cover as many factors as possible that may be encountered during the tourism process. Based on literature review and the actual needs, four types of multi-dimensional environmental information semantics are selected, as shown in Figure 2. Multi-dimensional environmental information semantics of the scenic spot.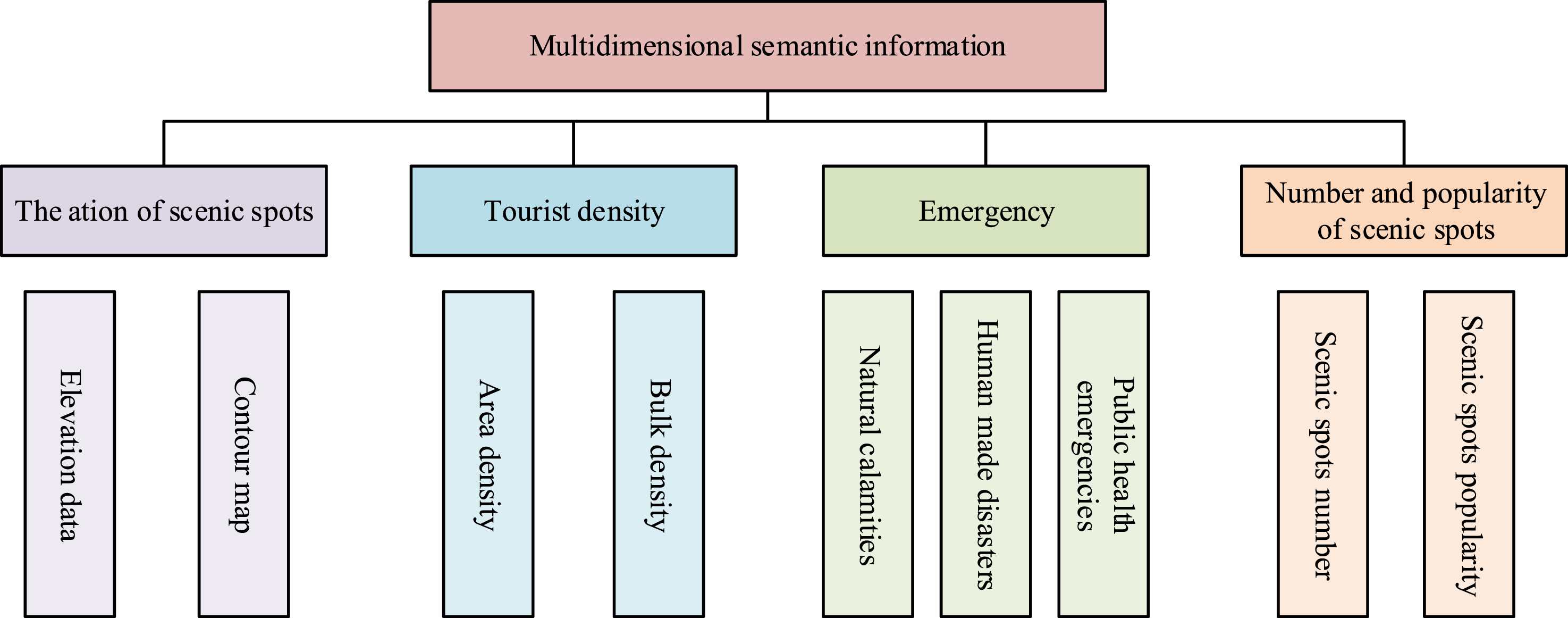
In Figure 2, the research takes the terrain undulation, tourist density, unexpected situations, number of scenic spots, and popularity of scenic spots as the multi-dimensional semantic information that needs to be considered. Different terrain undulations result in varying energy consumption for humans. For tourists with limited physical fitness, considering whether the terrain is steep or not is beneficial for increasing the tourist experience. In addition, the density of tourists in scenic spots can indicate the congestion on the scenic path, making it easier for tourists to choose their path and avoiding a decrease in tourist experience caused by excessive road traffic. Sudden situations mainly refer to the impact of natural disasters or human events, such as scenic spot maintenance. Timely acquisition of emergency information can facilitate tourists to timely understand closed or partially closed attractions, avoiding unnecessary travel. Considering the number and popularity of tourist attractions can ensure that tourists can not only choose famous attractions, but also reasonably choose tourist attractions along the way, meeting the diverse needs of tourists. After defining the multi-dimensional semantic information in the scenic area environment, weights are allocated based on the importance of different semantic information to optimize the efficiency of scenic area tourism planning. The weight definition for each semantic information is displayed in equation (1).


Dynamic path planning algorithm based on heuristic search algorithm optimization
The A* is a heuristic search algorithm. The cost function is introduced into path planning, which can simultaneously consider the cost of the path and the estimated value of the heuristic function when solving problems. It can efficiently find the best path.26,27 The basic idea of the A* is to determine the optimal path by evaluating the cost function of each node. This cost function is the sum of the actual path cost and the estimated value of the heuristic function. Heuristic functions are used to estimate the cost from the current node to the target node, guiding the algorithm towards the target during the search process and accelerating the search speed. The calculation process of the A* is presented in Figure 3. Computational flow of the A* algorithm.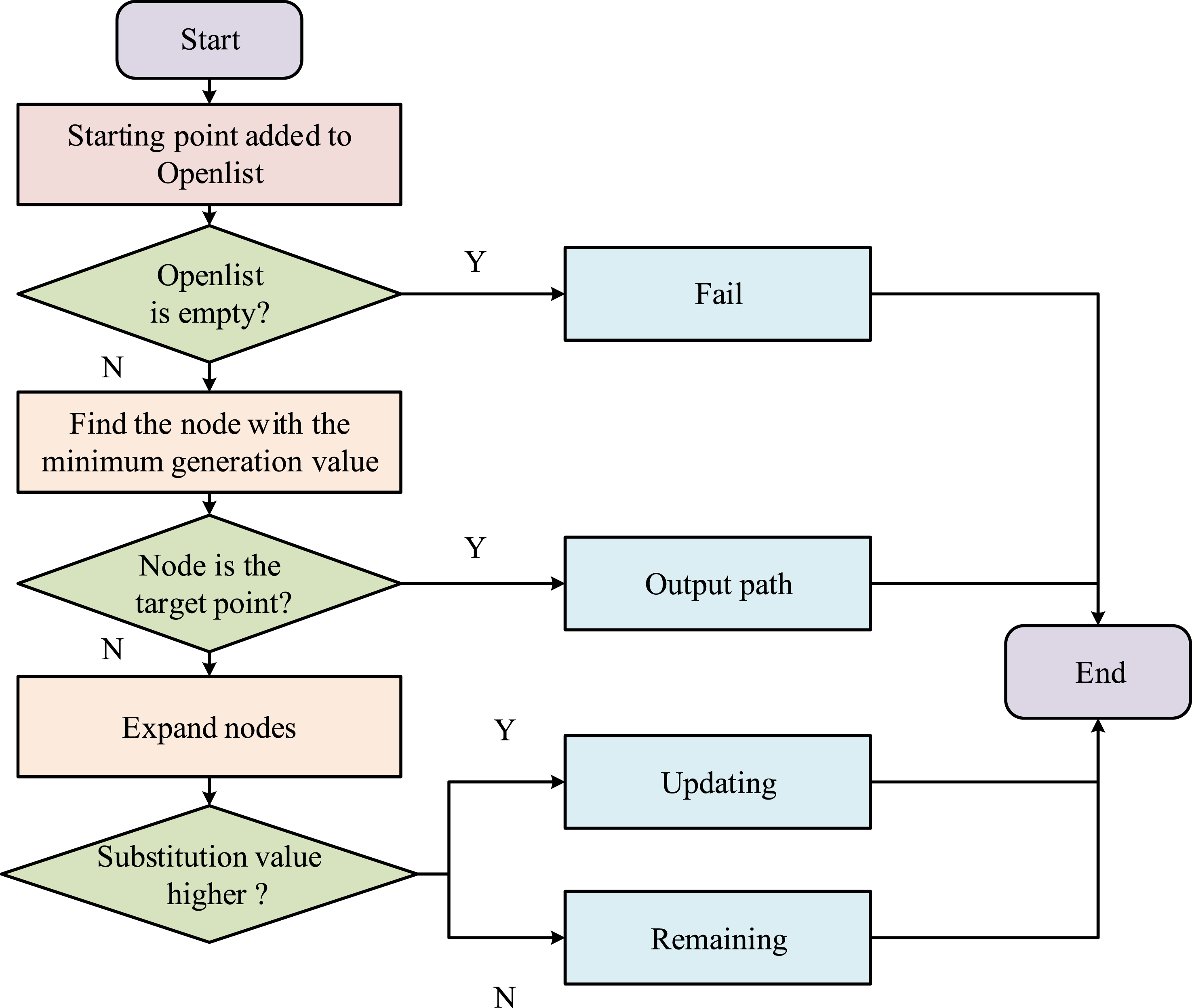
In Figure 3, the A* algorithm includes an Open List and a Close List. Firstly, the A* algorithm is initialized, adding the starting node to the Open List and setting the cost value of the starting node to 0. Subsequently, the study selects a node from the Open List as the current node, removes the current node from the Open List, and adds it to the Closed List. Whether the selected node is the target node is judged. If the current node is the target node, it indicates that the shortest path has been found. The algorithm terminates. If Close List is empty, it means that the target node cannot be reached. The current node is expanded. The A* algorithm traverses the adjacent nodes of the current node, calculates the proxy value of each adjacent node, and estimates the total cost. If adjacent nodes are already in the Close List, the node is ignored. If adjacent nodes are not in the Open List, they are added to the Open List. Its proxy value and estimated total proxy value are compared with the original node. If the new cost value is smaller, the cost values of adjacent nodes are updated and the total cost is estimated. The above steps are repeated until the maximum iteration is reached. The A* algorithm requires traversing all nodes to complete the search for the optimal path. Therefore, faced with complex and high-dimensional problems, the A* algorithm may be limited by heuristic functions, resulting in low search efficiency or inability to find a solution. The cost function of the A* is displayed in equation (3).





When the Implementation process of the LSA.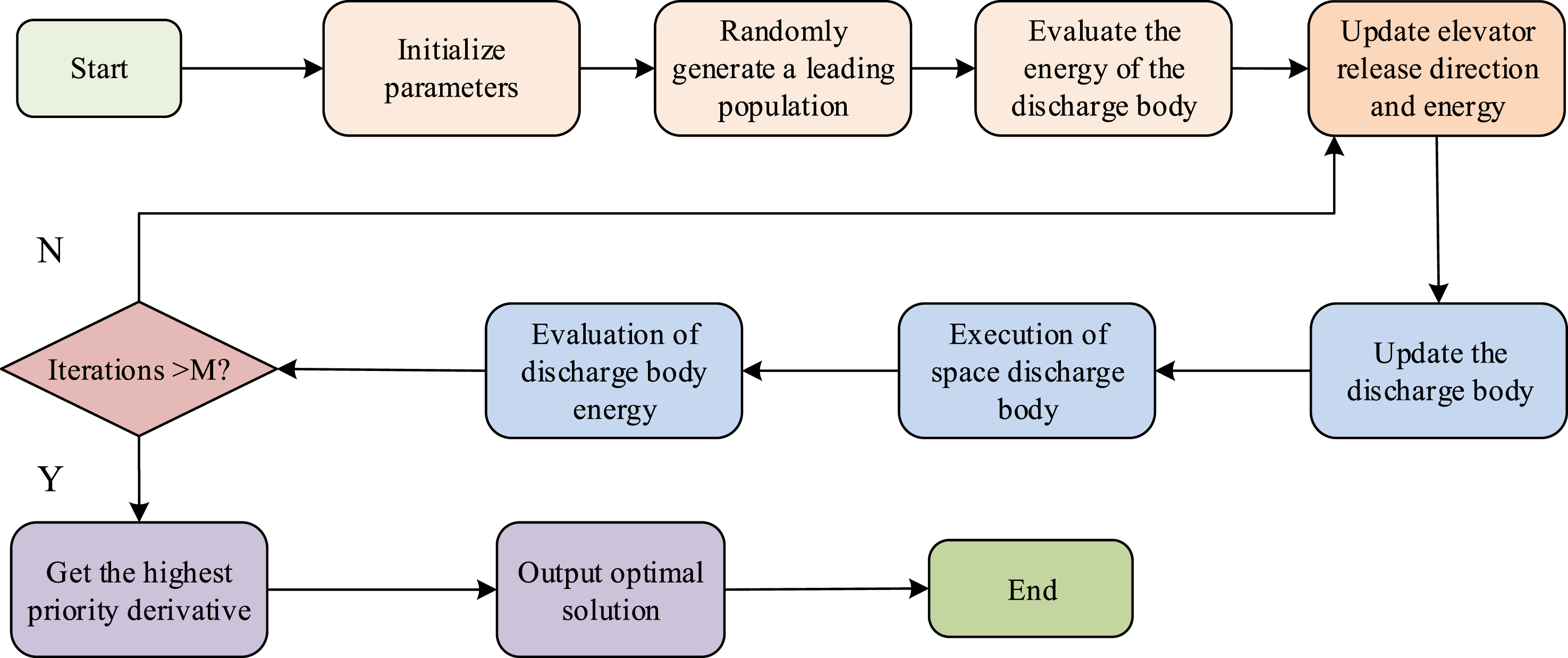
In Figure 4, the discharge body is one of the core concepts in the lightning search algorithm. In the cloud layer, when the discharge body collides with other particles elastically, it loses kinetic energy. The velocity calculation during this process is shown in equation (8). LSA-A* dynamic path planning algorithm flow.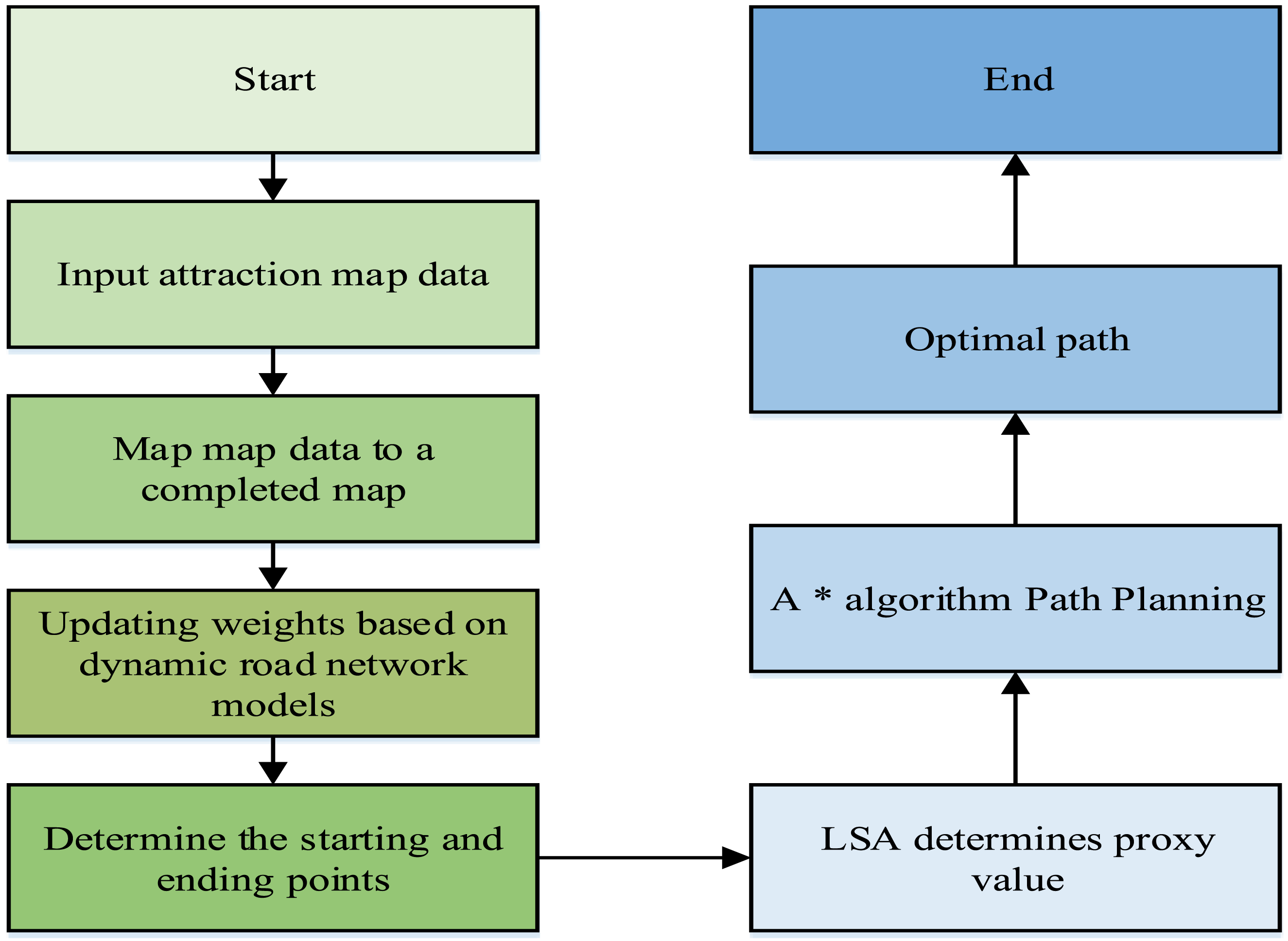




In Figure 5, firstly, the Chebyshev distance is used to calculate the cost from the current node to the target node. Subsequently, the starting node is placed in a priority queue, and the nodes in the queue are sorted according to the estimated cost. The node selected in the queue with the lowest estimated cost is the current node. When selecting nodes with the lowest estimated cost, the A* algorithm optimized by LSA introduces randomness and selects nodes with higher cost with a certain probability for expansion. This can avoid getting stuck in local optima and increase the exploration range of the solution space. Subsequently, the study extends the current node to generate its adjacent nodes and calculates the cost of these nodes. The research utilizes the characteristics of LSA parallel computing to simultaneously calculate the cost of multiple nodes when expanding nodes. This can accelerate the search process and improve search efficiency. When expanding a node, if the expanded node includes a target node, the search ends and the shortest path is found. If not included, its position in the priority queue is update based on the cost of the expansion node. The above steps are repeated until the target node is found or the queue is empty. To validate the performance of the path planning algorithm, the accuracy, precision, recall, and F1 value are used to analyze the performance. Equation (12) displays the accuracy.


The recall is shown in equation (14).

The F1 is shown in equation (15).

A game route planning model based on dynamic route planning
After constructing a DRND and a dynamic path planning algorithm, they are integrated to construct an intelligent planning model for tourist attractions and routes. The basic architecture of the intelligent planning model for scenic spot routes is shown in Figure 6. Basic architecture of the intelligent planning model of scenic spot routes.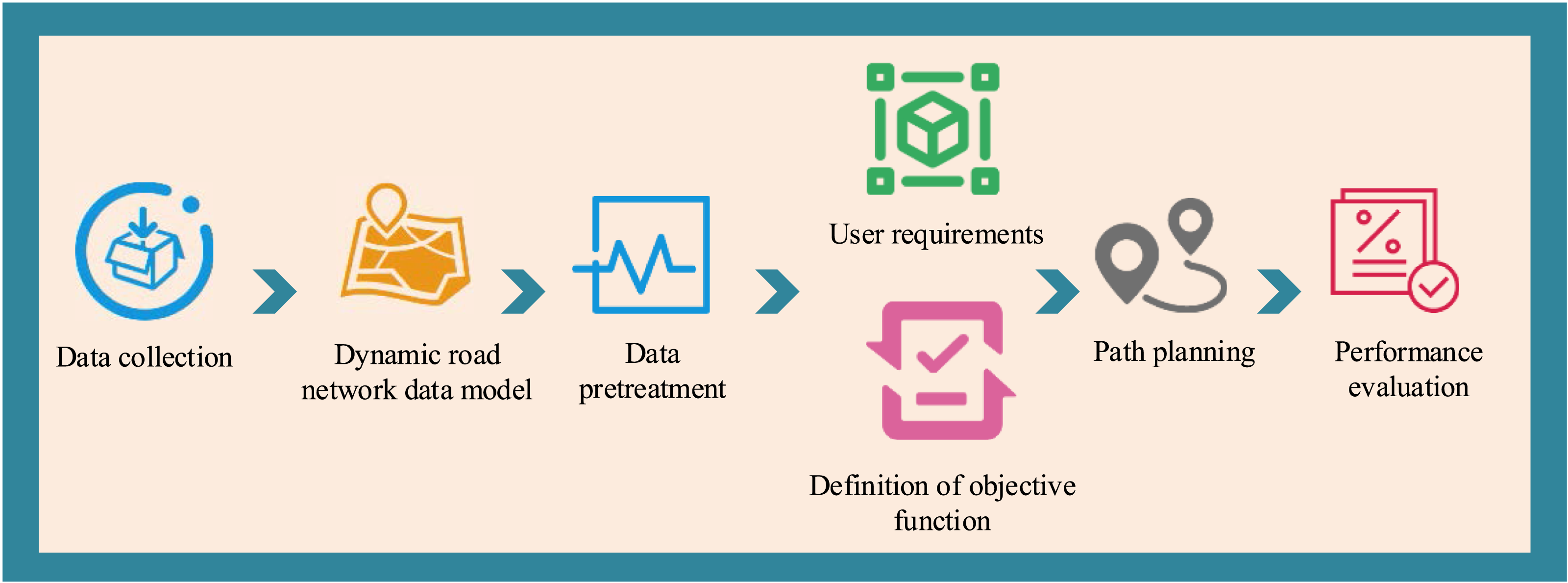
In Figure 6, the basic architecture constructed in the study consists of a data processing module, a road network construction module, a user demand module, an objective function definition module, a path planning module, and a performance evaluation module. Firstly, in the data pre-processing module, the road network monitoring data of scenic spots is integrated into the intelligent planning model of scenic spot routes to construct the subsequent DRND. The road network monitoring data includes road undulation data of scenic spots, scenic spot related data, pedestrian flow data, etc. Subsequently, the dynamic road network data and scenic spot data are pre-processed, including data cleaning, format conversion, geocoding, and other operations. In the road network diagram construction module, pre-processed dynamic road network data and scenic spot data are used to construct a dynamic road network model for scenic spots. This model uses geocoding and geographic information system technology to represent scenic spots and roads in the form of nodes and edges, and forms the topological structure of the road network diagram through adjacency tables.
In the user demand acquisition module, based on the needs and preferences, the user’s demand for tourist attractions and travel routes is obtained. For tourists with insufficient physical fitness, recommended routes with lower road undulations and more rest areas can be provided. For tourists who hope to visit more scenic spots, it can provide more accurate and personalized route planning based on their travel time and preferences. In the objective function definition module, the corresponding objective function is defined based on the needs of tourists such as the shortest path, minimum conversion times, and maximum attraction coverage. Based on the objective function of tourists, LSA-A* finds the optimal travel route for tourists. Due to the limitations of travel time and traffic in scenic areas, it can also use dynamic road network models and constraint modules to limit the scope of route planning and remove infeasible routes. Finally, the study evaluates the generated lines using user satisfaction evaluation and the ten-fold cross-validation method, and optimizes them based on user feedback and evaluation. The basic principle of the ten-fold cross-validation method is shown in Figure 7. Principle of the ten-fold cross-validation method.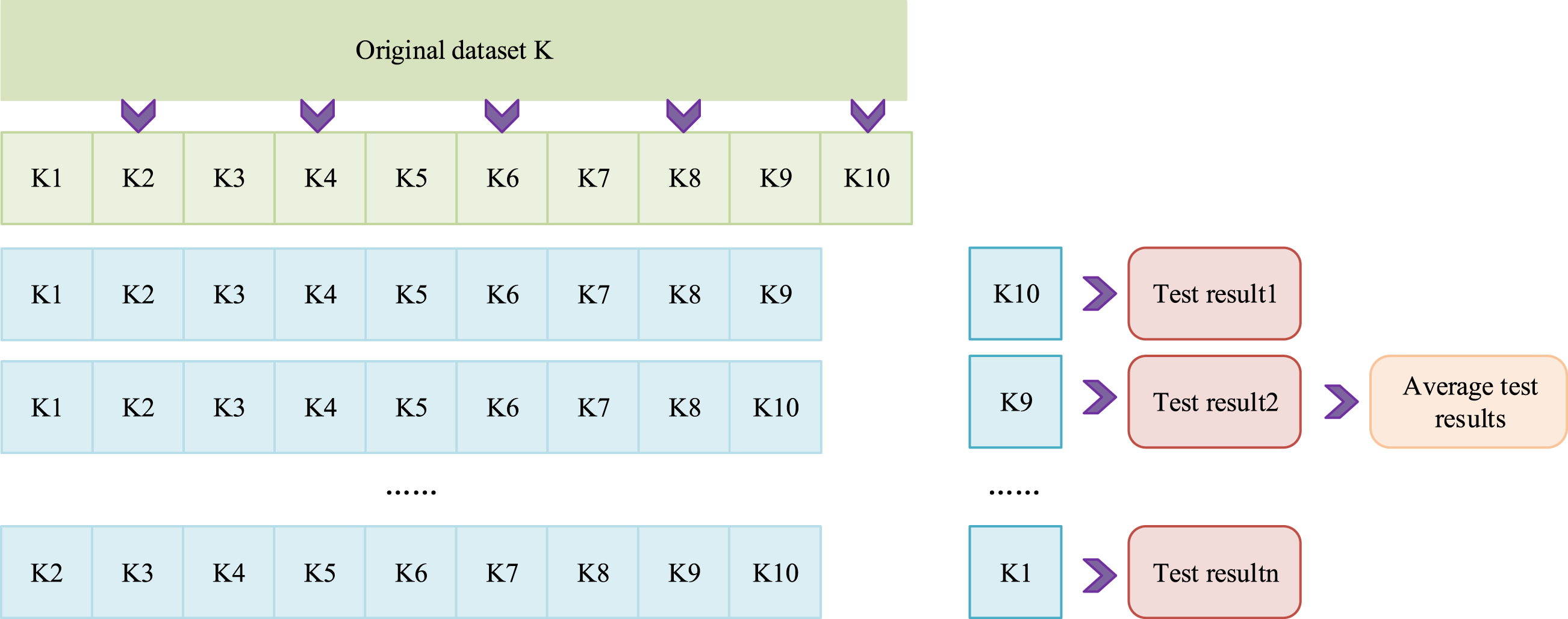
In Figure 7, the cross-validation is to divide the dataset into K subsets. One is the test set, and the remaining is the training set every time, repeating K times. Finally, the average of the K results is used as the performance evaluation of the model. In ten-fold cross-validation, the study first randomly divides the dataset into K subsets to ensure that the size of each subset is equal. For each subset, one is the test set and the remaining K-1 subsets as the training set. Secondly, in each training session, the training set is used to train the model. The test set is applied to evaluate the model performance until each subset is used as the test set. Finally, the average of K results is taken as a performance evaluation indicator for the model. The advantage of ten-fold cross-validation is that it can make better use of the dataset while reducing the randomness of model performance evaluation. The ten-fold cross-validation method can provide relatively stable and reliable performance evaluation results, which is particularly useful for small datasets. After completing the performance evaluation of the model, it is put into practical application.
Empirical experiment on intelligent planning model for scenic spot routes based on fusion optimization dynamic path planning algorithm
To verify the effectiveness of the LSA-A* and the intelligent planning model for tourist attractions, the study conducts performance comparison experiments and empirical analysis on the dynamic road network model, LSA-A*, and the intelligent planning model for tourist attractions.
Validity analysis of dynamic road network model
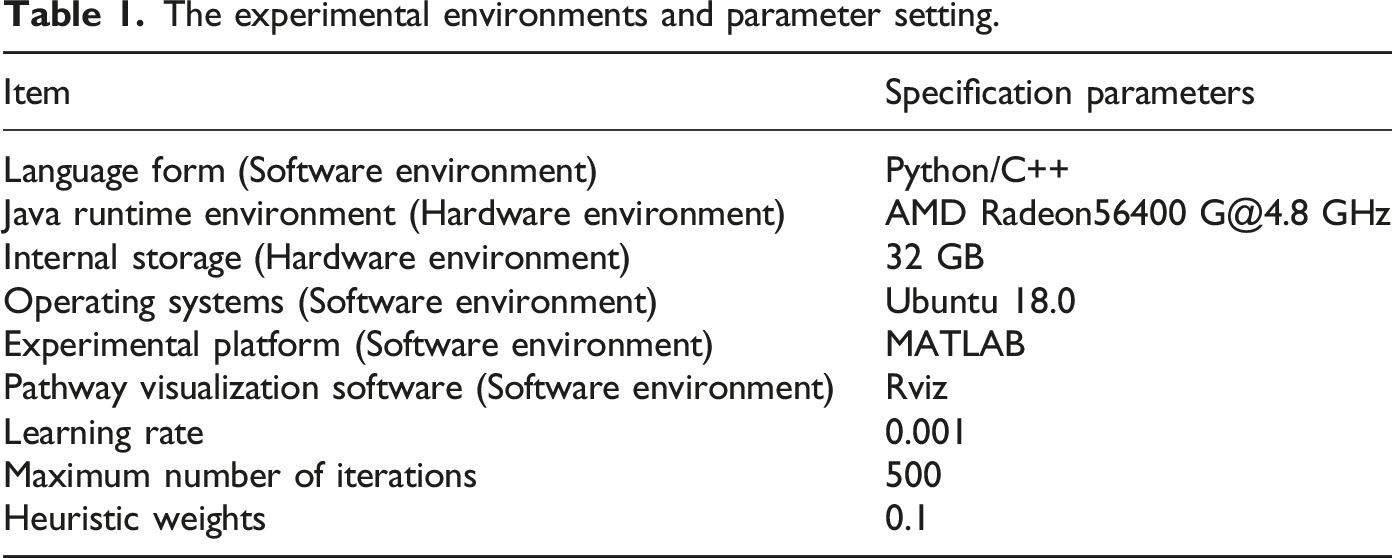
The experimental environments and parameter setting.
The fitting accuracy and precision comparison results of the path undulation for various road network data models are shown in Figure 8. Comparison of the fitting accuracy and accuracy of the path fluctuations of each model.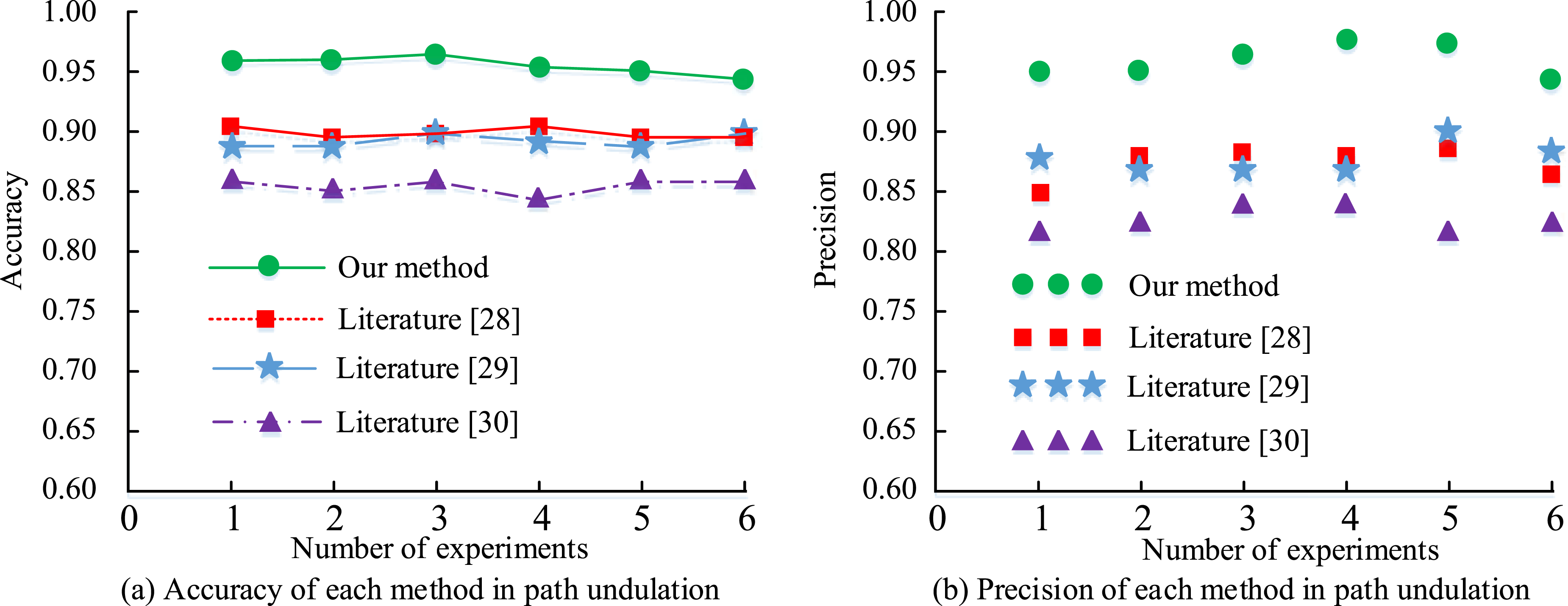
Figure 8(a) displays the accuracy results of the path undulation fitting for the road network data models in various scenic spots. In Figure 8(a), the path undulation fitting accuracy of the DRND was 0.96, which was at least 0.05 higher than the baseline model. Figure 8(b) displays the precision results of the path undulation fitting for road network data models in various scenic areas. In Figure 8(b), the path undulation fitting precision of the DRND was 0.95, which was higher than the fitting precision of other comparison models. Based on the above results, the DRND has a better fitting effect on path undulation. The fitting accuracy and precision of the passenger flow for various road network data models are shown in Figure 9. Comparison of fitting accuracy and accuracy of visitor traffic for each road network data model.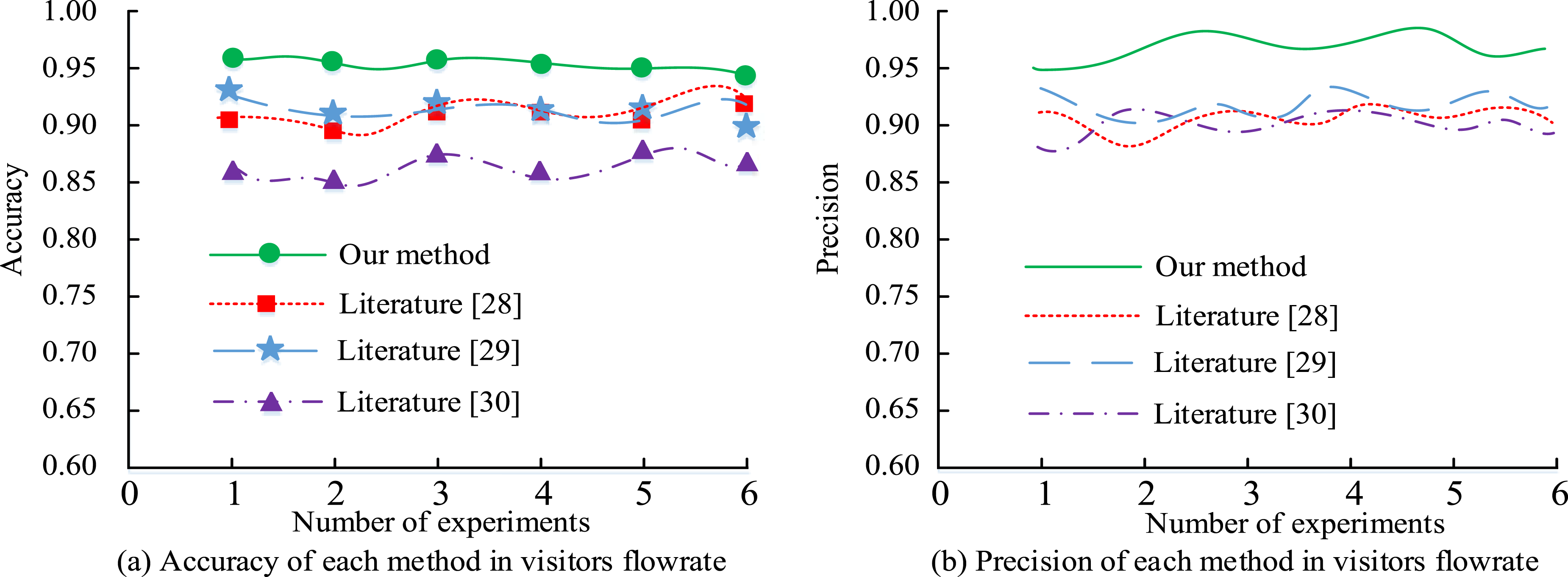
Figure 9(a) displays the accuracy comparison results of the pedestrian flow fitting for the road network data models in various scenic spots. In Figure 9(a), the pedestrian flow fitting accuracy of the DRND constructed in the study was 0.95, which was at least 0.03 higher than the baseline model. Figure 9(b) shows the precision of pedestrian flow fitting for the road network data models in various scenic spots. In Figure 9(b), the pedestrian flow fitting precision of the DRND constructed in the study was 0.97, which was higher than the fitting precision of other comparison models. Based on the above results, the DRND has a better fitting effect on pedestrian flow, which can be applied to path planning in scenic areas.
Validity verification of dynamic path planning algorithm based on LSA-A* optimization
To verify the effectiveness of the dynamic path planning algorithm optimized by the fusion heuristic search algorithm proposed in the study, Dijkstra algorithm, traditional A* algorithm, and Minimum Spanning Tree algorithm (Prim) are used. The dataset used is the OpenStreetMap dataset. This dataset includes abundant geographic data, including road networks, buildings, and geographic features, commonly used for performance validation of path planning algorithms. In the experiment, the weights of terrain relief, tourist density, emergencies and visibility of scenic spots were 0.2, 0.3, 0.2, and 0.3, respectively. The performance comparison indicators are path planning accuracy, precision, recall, and F1 value. The experimental environment is AMD Radeon56400G@4.8GHz. The accuracy and precision results are displayed in Figure 10. Results of the accuracy and precision rate of each algorithm.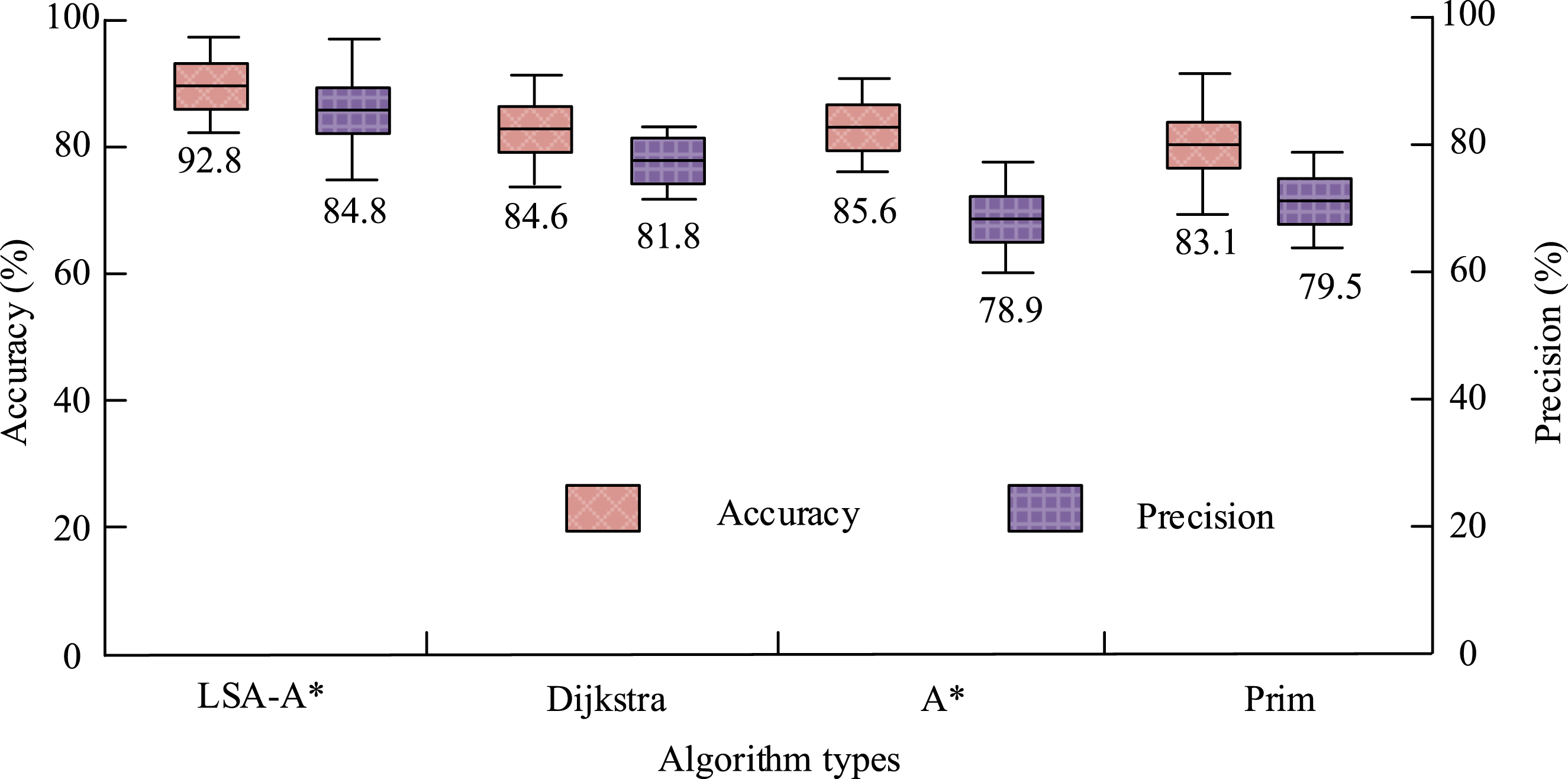
In Figure 10, the proposed LSA-A*-based dynamic path planning algorithm had better path planning accuracy and precision compared with other comparison algorithms. Its accuracy was 92.8%, which was 7.2% higher than the accuracy of traditional A*. In addition, the precision of the research algorithm was 84.8%, which was 3.0% higher than the traditional A*. From the above results, the accuracy and precision of the research algorithm are superior to that of other comparison algorithms. The recall and F1 are shown in Figure 11. Recall and F1 value of each comparison algorithm.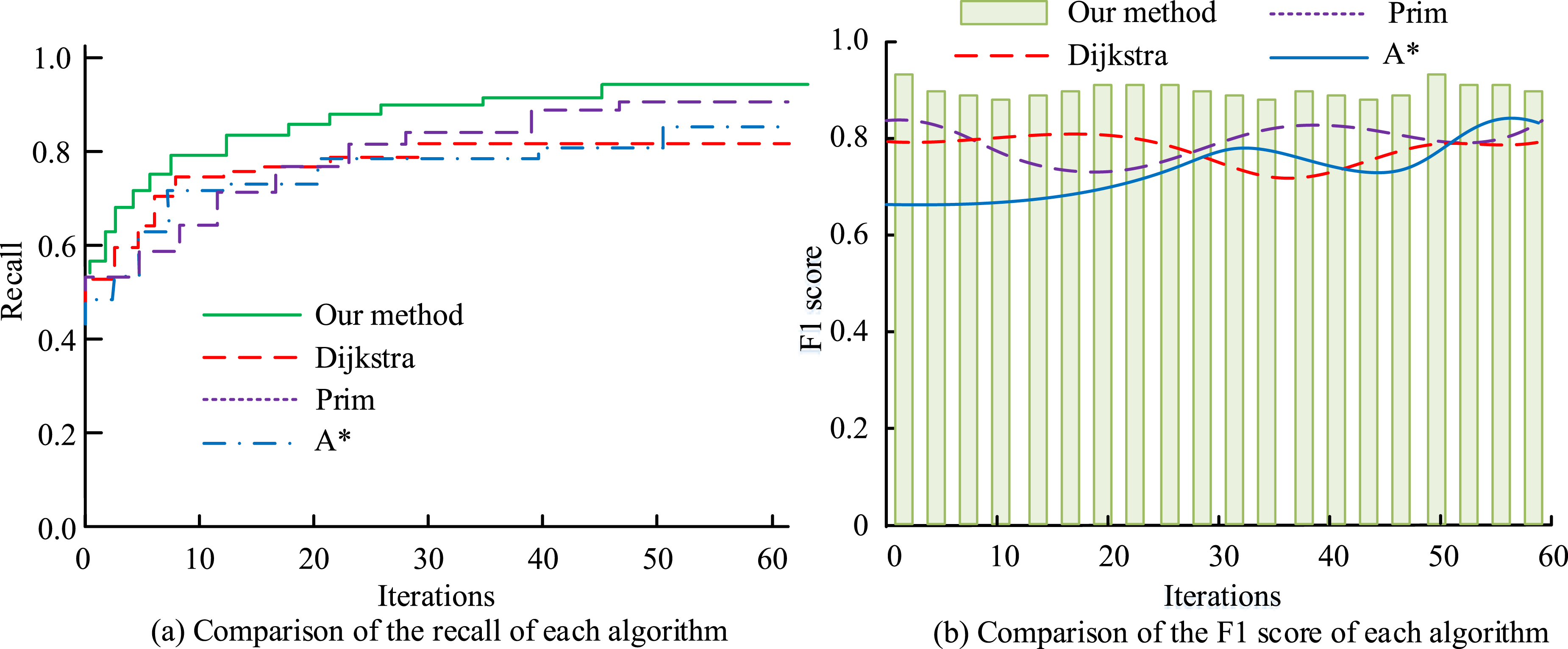
Figure 11(a) displays the recall rates for various path planning algorithms. In Figure 11(a), the recall curve of the designed algorithm outperformed other comparison algorithms, with a value of 0.93, which was at least 0.05 higher than the baseline model. Figure 11(b) displays the comparison results of F1 for various path planning algorithms. In Figure 11(b), the F1 value of the research algorithm outperformed other comparison algorithms, at 0.91. Based on the above results, the research algorithm performs better than other path planning algorithms, which has practical application value.
Effectiveness analysis of the intelligent planning model for scenic spot routes based on heuristic search algorithm optimization
To verify the effectiveness of the proposed intelligent planning model for tourist attractions, a performance comparison experiment is conducted using road network data from the Tianya Haijiao scenic area. The dataset contains 48 roads, including road length, width, orientation, and other data. The comparison models are scenic area path planning models based on Dijkstra, A*, and Prim. The performance comparison indicators include the number of path transitions under the shortest path requirement, path planning length, training convergence curve, and model execution time. The experimental environment is AMD Radeon56400G@4.8GHz. The comparison results of the planned paths for each comparison model under the shortest path requirement are shown in Figure 12. The comparison results of the planning paths of each comparison model.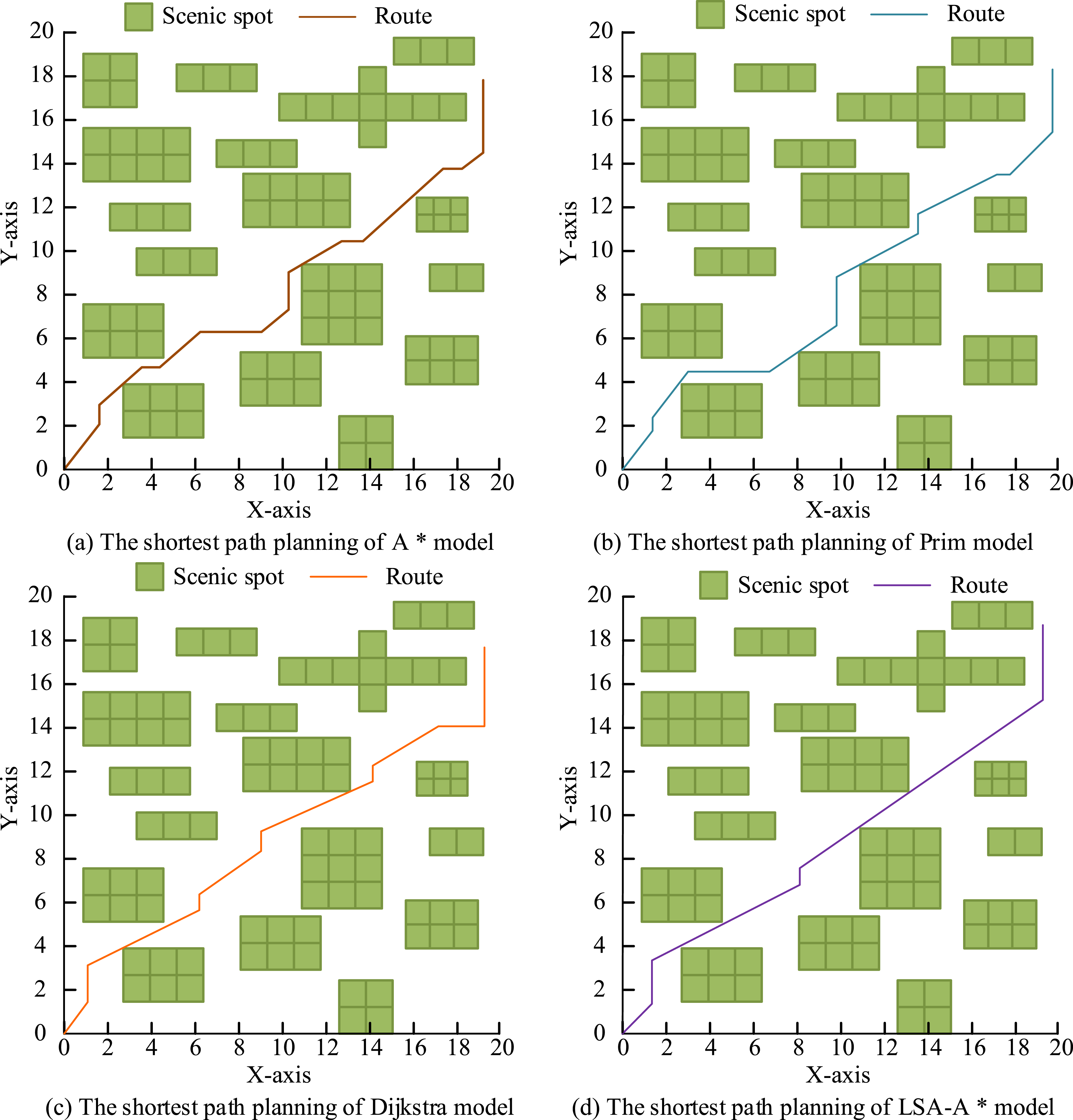
In Figure 12, under the shortest path requirement, the path smoothness of the proposed LSA-A*-based intelligent planning model for scenic spot routes was higher than that of other models. Its path had 5 turns, which was 8 less than that of the traditional A* model. In addition, the path length planned by the LSA-A* was also shorter than that of other paths, at 0.9 km, which was 0.3 km less than the number of turns in traditional A* path planning models. Based on the above results, the LSA-A* model performs better than other comparison models. The convergence curves and execution time are displayed in Figure 13. Convergence curve and execution time comparison results of each model.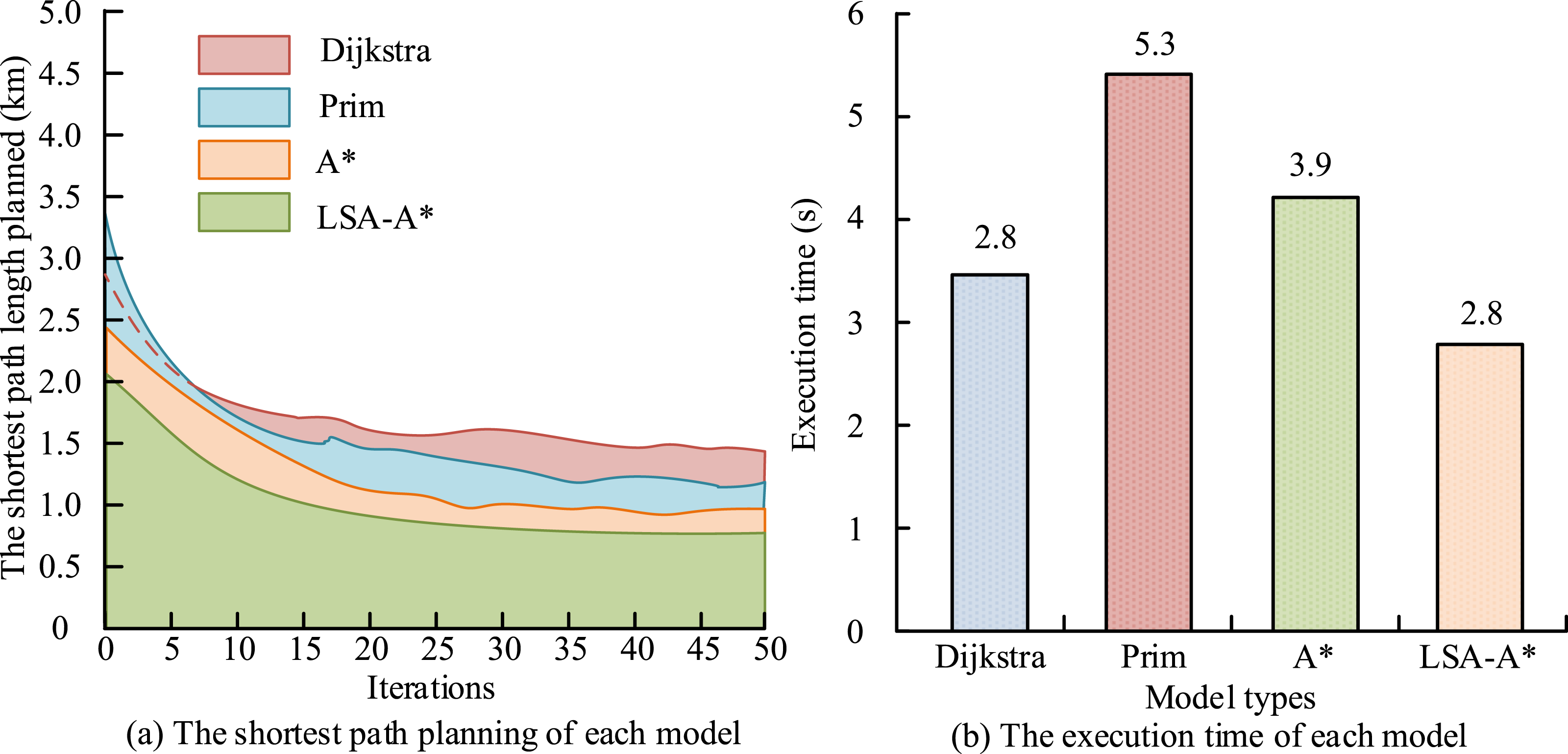
Figure 13(a) displays the convergence curves. In Figure 13(a), the training convergence speed of the LSA-A* was faster than other models. When the iteration was 15, it entered the convergence stage, with good training efficiency. Figure 13(b) displays the execution time of each comparison model. The LSA-A* convergences faster, because it has less computational complexity than other path planning algorithms. By introducing the Che Bi A shev distance, the LSA-A* algorithm effectively reduces the computational cost of useless nodes, and then reduces the computational complexity of the model. In Figure 13(b), the execution time of the proposed model was 2.8s, significantly lower than other models. Based on the above results, the training efficiency and execution efficiency of the research model are superior to other comparison models. Finally, to further validate the application effect of the LSA-A* dynamic path planning model, 5 tourists and 5 experts are selected as the research subjects to evaluate the satisfaction of each path planning model. The satisfaction evaluation results are shown in Figure 14. Evaluation results of tourist and expert satisfaction of each model.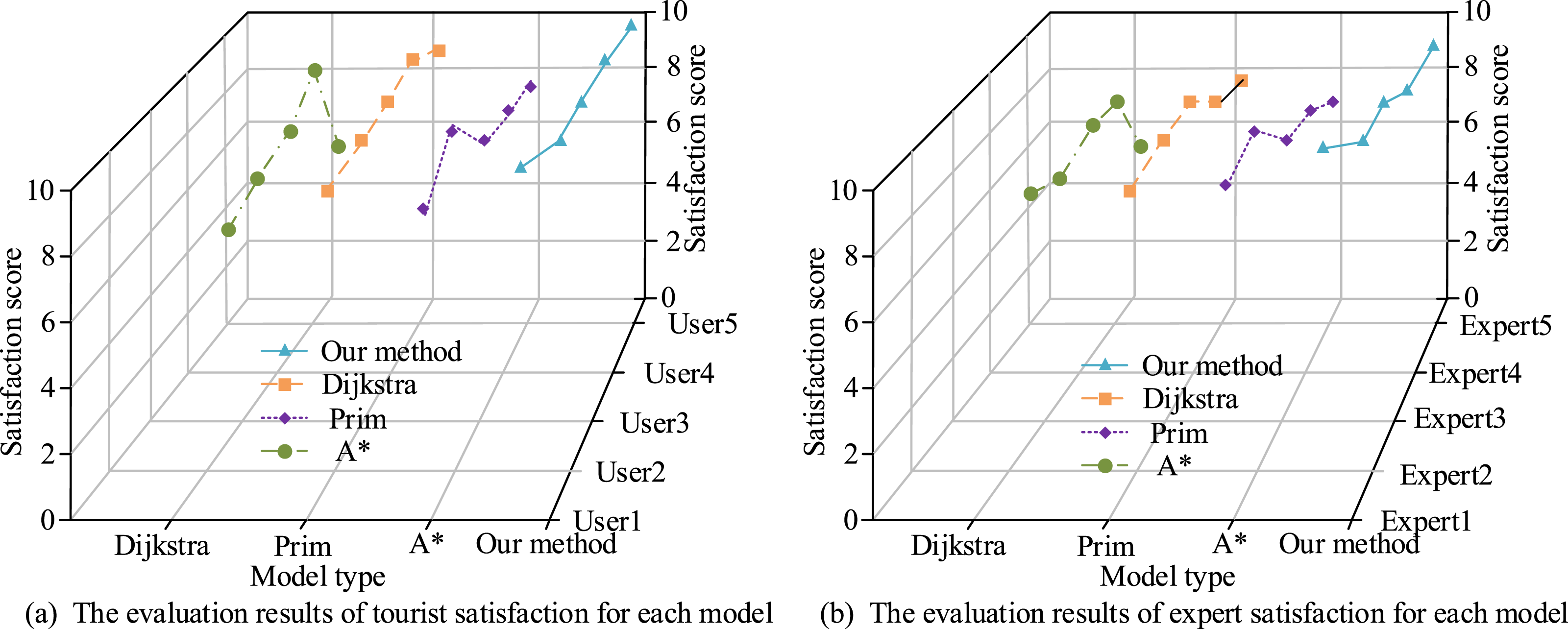
Figure 14(a) shows the evaluation results of tourist satisfaction for each path planning model. In Figure 14(a), the tourist satisfaction score of the LSA-A* model was 9.4 points, which was higher than other comparison models (p < 0.05). Figure 14(b) shows the expert satisfaction evaluation results of each path planning model. In Figure 14(b), the expert satisfaction score of the research model was 8.9 points, which was higher than that of other comparison models (p < 0.05). Based on the above results, the LSA-A*model can meet the needs of tourists and experts.
Conclusion
At present, traditional tourist attractions and route planning methods have poor performance and cannot meet social needs. To improve this situation, the study first integrates multi-dimensional environmental semantic information based on the concept of dynamic road network data model, uses adjacency table as the topological structure, and constructs a dynamic road network data model. Then, the LSA was used to improve the A* algorithm and construct the LSA-A* dynamic path planning algorithm. Finally, this study combines a dynamic road network data model and the LSA-A* algorithm to construct an intelligent planning model for tourist attraction travel routes. The effectiveness of the LSA-A* is verified. Its accuracy, precision, recall, and F1 were 92.8%, 84.8%, 0.9, and 0.91, which outperformed other comparison algorithms. The study also conducts empirical analysis on the LSA-A* model. The planned route had 5 turning points and a total path length of 0.9 km, which was better than that of other models to meet the shortest time needs. The model entered a convergence state when the iterations were 15. Its execution time was 2.8 s, which had higher training and execution efficiency than other models. In addition, the study also conducts a satisfaction survey on the intelligent planning model. The tourist satisfaction rating was 9.4 points, and the expert satisfaction rating was 8.9 points, which was higher than that of other models. The above results show that the performance of the LSA-A* is excellent, which can realize the effective planning of tourist routes of scenic spots, improve tourism experience, and then promote the development of tourism. However, the study only conducts empirical analysis on the model in smaller scenic areas. To consider scenic areas with more complex terrain and area, future research will focus on verifying their performance under more complex scenic conditions.
Footnotes
Funding
The author received no financial support for the research, authorship, and/or publication of this article.
Declaration of conflicting interests
The author declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.