
Abstract
In physical education teaching, precise posture differentiation is very important for improving the teaching effect. To improve students’ skill mastery level and physical fitness, this study propostures an optimization method for physical education teaching based on the characteristics of different human postures. This method mainly adopts posture matching algorithm to more accurately process and respond to various human body differences and posture features. The results showed that the optimization methods of physical education teaching have improved students’ skill mastery level and physical fitness level. The skill mastery level of students using research methods reached 95.25%, with learning satisfaction and efficiency scores of 96.39 and 95.78, respectively. This method can effectively integrate human differences and posture characteristics and improve students’ skill acquisition and physical health. This study improves the overall effectiveness of physical education teaching and provides new ideas and references for subsequent related research and practice.
Keywords
Introduction
In today’s globalization and informatization, the role of physical education teaching (PET) is becoming increasingly important. 1 However, traditional PET methods often ignore the influence of human differential postural characteristics, which may adversely affect students’ learning effectiveness and physical health. 2 The traditional PET method treats the human body as a standardized rigid body. For example, in basketball shooting teaching, it is uniformly required that the elbow joint form a 90° angle. This ignores the mechanical compensation caused by differences in humeral length among adolescents, resulting in inconsistent teaching effectiveness and uneven physical development of students. The study of human differential postural characteristics is significant for understanding and optimizing PET. 3 Factors such as human body structure, physiological functions, and lifestyle habits lead to unique posture characteristics of each person. 4 At present, human posture recognition technology mainly includes two-dimensional and three-dimensional recognition technologies that combine bone characteristics. Moreover, most technologies mainly consider the differences in human posture for bone recognition, lacking consideration for human differences, resulting in overall poor posture recognition and inability to meet teaching needs. 5 Therefore, to better meet the requirements of PET, this paper propostures a posture matching algorithm that utilizes human body differential posture features to optimize PET. This algorithm constructs a dynamic matching model by integrating individual posture features such as bone length and joint mobility. It transforms standardized action templates into personalized guidance solutions based on human differences, fundamentally solving the problem of uneven teaching effectiveness caused by mechanical compensation. There are two innovative points in the research, one of which is the introduction of human differential posture features to reflect PET, effectively improving the effectiveness of teaching. Second, considering individual differences and the complexity of posture features, the research adopts fusion posture features and motion posture matching technology to further improve the recognition effect of posture, ensuring the reliability of the technology. The technology studied will improve the effectiveness of PET and provide technical references for the improvement of posture recognition technology.
Related works
The research on posture matching algorithms for human differential posture features is an emerging research field, which focuses on how to optimize and improve the effect of PET by understanding and applying human differential posture features. T Ishigaki et al. delved into human postural control in two different haptic feedback situations. These two situations were contact with a fixed object and contact with other people. It was found that there were significant differences in the posture control characteristics and frequency characteristics between the two cases. Posture stability was affected regardless of the haptic feedback situation but was better when touching a fixed object. It provided a new perspective for the study of human posture control, and also developed personalized posture control training methods. 6 Lin Y et al. conducted research on current human posture recognition technologies and found that human postures face the problem of insufficient accuracy. Therefore, a label free optical motion capture human posture recognition technology was proposed. It addresses the issue of inaccurate human posture detection in Media-pipe by correcting the velocity threshold of each joint to ensure recognition accuracy. Through experiments, it has been shown that this technology can effectively recognize various scenarios and different age groups. 7 Maskeliū Nas et al. found that human posture recognition has a wide range of applications in medical rehabilitation, but it is primarily limited by technical and parameter issues, resulting in poor recognition performance. Therefore, a rehabilitation system based on virtual reality (VR) was proposed, which combined VR physical training monitoring environment with upper limb rehabilitation technology to achieve accurate interaction and improve patient participation in rehabilitation training. 8 Lin J et al. found that computer vision has important applications in the field of human posture recognition. To improve the effectiveness of human posture recognition, a new analysis framework based on image and video inputs was proposed. The training results indicated that this technique had excellent performance in human posture learning. 9 A Reed et al. evaluated postural control in 20 healthy young adults and explored the transient effects of cognitive perturbations on postural control. Three experimental conditions were designed: no cognitive interference, simple cognitive interference, and complex cognitive interference. It was found that cognitive perturbations had a significant effect on transient balance characteristics, with both difficult and simple cognitive perturbations leading to a transient increase in postural swing compared to the cancellation of cognitive tasks. 10
The core of PET optimization research is posture matching algorithm. It designs PET strategies that better meet individual needs by accurately analyzing and understanding human posture characteristics, combined with individual differences. H Guo et al. proposed a robust singular value decomposition method for estimating the attitude angle. In this method, an attitude calibration model was developed based on the i-USBL positioning mode, and the attitude angle of the USBL was solved by least squares method and singular value decomposition. The results showed that the attitude angle was better than the traditional singular value decomposition and Gaussian Newton iteration method in terms of calibration accuracy and robustness. 11 To overcome the limitations of dual-frequency infrared radiation attitude measurement in all-weather conditions, M Xu et al. introduced a dual-frequency solar infrared radiation interference analysis and compensation technology. This approach utilized MODTRAN to calculate the proportion of direct and scattered infrared radiation from the sun, and then simulated the impact of solar infrared radiation interference on dual-frequency attitude measurement. Experimental findings demonstrated that the proposed compensation algorithm successfully maintained attitude calculation accuracy within ±1°, thereby significantly enhancing the precision of infrared radiation attitude measurement in the presence of solar infrared radiation interference. 12
In recent years, deep learning has been widely applied in posture detection and prediction of sports athletes. H. Ren et al. proposed a target extraction algorithm based on time-sharing memory mechanism and bone motion enhancement to address the issues of inaccurate posture detection and high training costs in sports videos. They also constructed a deep learning athlete detection system. 13 The experimental results showed that the accuracy of this method in motion video detection was improved by nearly 10% compared to traditional convolutional networks. R. Blythman et al. evaluated the performance of a deep learning-based unlabeled posture estimation model in rugby tackle action, addressing the issues of cumbersome and limited application of traditional labeling methods in sports collision damage assessment. The results showed that 75.6% of joint position estimation errors were below 25 mm, with an average error of 47 mm. 14 There was currently a lack of systematic review on deep learning-based human posture estimation methods. Therefore, G. Lan et al. summarized the mainstream methods and applications of 2D and 3D human posture estimation, and combined bibliometric analysis to explore the current challenges and research trends. This review provided a systematic and comprehensive reference framework and research guidance for beginners and researchers. 15 S. Dubey et al. systematically reviewed the development history of 2D and 3D human posture estimation in response to the problems of low accuracy and poor adaptability of traditional posture estimation methods. This study focused on analyzing mainstream algorithms and evaluation metrics based on deep learning. The results showed that deep neural networks significantly improved the accuracy and robustness of human joint localization, providing effective support for sports analysis. 16 In response to the problem of poor algorithm adaptability in existing research on human activity recognition, F. Kulsoom et al. systematically sorted out human activity recognition methods for different application scenarios and comprehensively evaluated mainstream machine learning algorithms and sensor types. The results showed that selecting appropriate algorithms and collection devices based on application requirements could significantly improve recognition accuracy and system stability, providing reliable support for the field of PET. 17
In summary, this research field provides a new theoretical basis for understanding human motion mechanisms and designing personalized PET strategies based on posture matching algorithms based on human differential posture features. Human differential posture features refer to a set of dynamic posture features formed by individual differences such as bone length, joint mobility, and muscle recruitment patterns. Existing methods mostly focus on motion shape detection, relying on massive annotations and a single scene for training. The proposed method can effectively reduce cross-body motion matching errors by integrating skeletal biometric features with dynamic temporal sequences. In addition, the research has also led to practical improvements, such as the use of gesture matching algorithms to better understand students’ body movements and habits, which can provide more precise training recommendations and teaching programs. More accurate identification and understanding of the differential postural characteristics of the human body, as well as more effective use of this information to optimize PET, need to be further explored in future research. It is expected that as science and technology develop, the further development of PET can be promoted.
Design of PET optimization method and posture matching algorithm system using human differential posture characteristics
In this section, a posture matching algorithm system using human differences and posture characteristics is constructed. The posture matching algorithm achieves personalized teaching by calculating the similarity of actions. Considering the factors such as each person’s body structure, physiological functions and living habits, each person’s posture characteristics are unique. Therefore, it is necessary to construct a posture matching algorithm system that can fully consider these differences. Second, an optimization method for PET was designed by integrating posture features and action posture matching algorithm. Through this method, human differences and posture characteristics can be better combined to improve the effectiveness of PET. The study purpostures to deepen the understanding of the role of human body differences and posture characteristics in PET, and also to provide new basis and perspective for the further optimization of PET.
Construction of posture matching algorithm system based on human differences and posture characteristics
In modern society, human posture recognition and matching technology has become an important research and application field.
18
It covers many important fields such as human-computer interaction, VR, medical health, and physical training, which affect people’s daily life and work.
19
However, due to the complexity and differences of the human body, as well as the influence of environmental factors, accurate posture recognition and matching still faces great challenges.
20
The system plays an important role in real-time feedback on human-computer interaction, disease diagnosis and rehabilitation training in the medical and health field, and even in athlete technical analysis in sports training. The differential characteristics of the human skeleton are shown in Figure 1. Differences in human skeletal characteristics.
The different colored lines in Figure 1 represent the skeletal characteristic curves of different parts of the human body. Image width and image height are the fundamental dimensional parameters of skeleton images, used to quantitatively describe the extension range of skeleton images in 2 Dimensional (2D) space. The numerical changes on the horizontal and vertical axes can visually display the differences in spatial distribution, morphological structure, and other aspects of different skeleton images. Among the many human characteristics, the study of skeletal differentiation is an extremely challenging and extremely important field.
21
The differential characteristics of the human skeleton include not only static information such as the length, angle, and shape of bones, but also dynamic information such as joint range of motRion, strength, and speed.
22
The differential characteristics of the human skeleton is important, and the standardization of the joint points can achieve the same pixel scale, as calculated in equation (1) Process of posture matching algorithm using human body differences and posture features.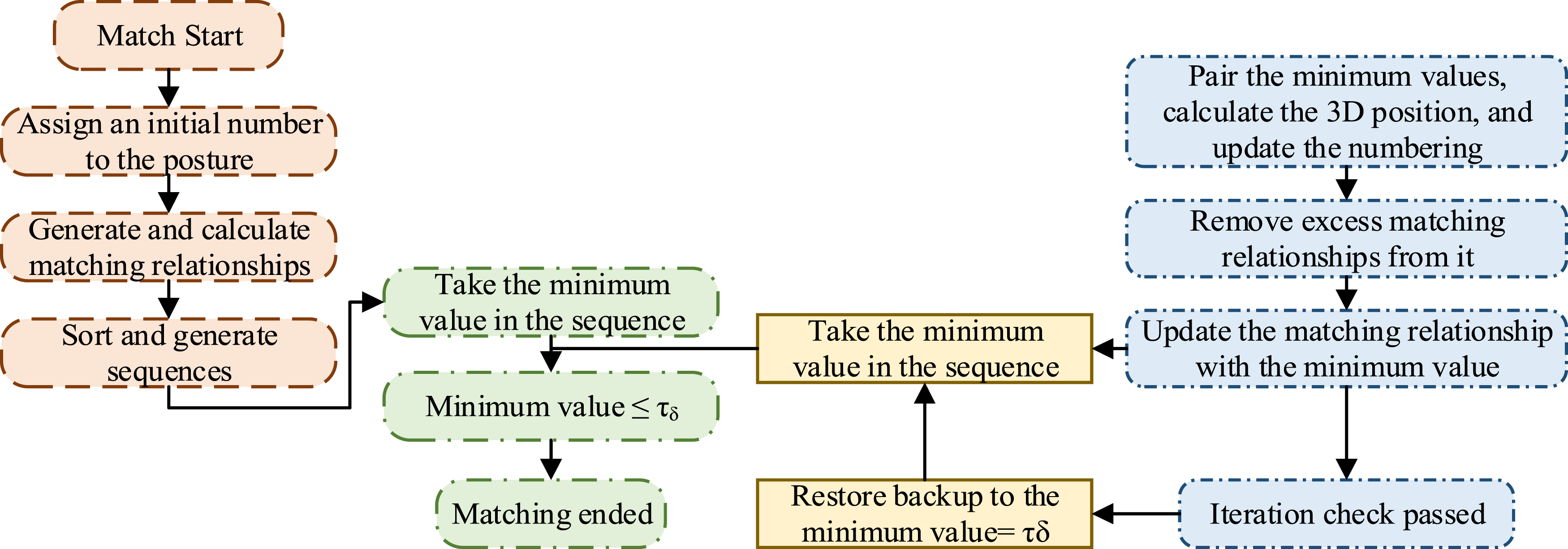





In Figure 2, “Assign an initial number to the posture” is the initial identification code assigned to the human posture to be matched in the initial stage, which is used for establishing and distinguishing matching relationships in the future. Time series with inconsistent length.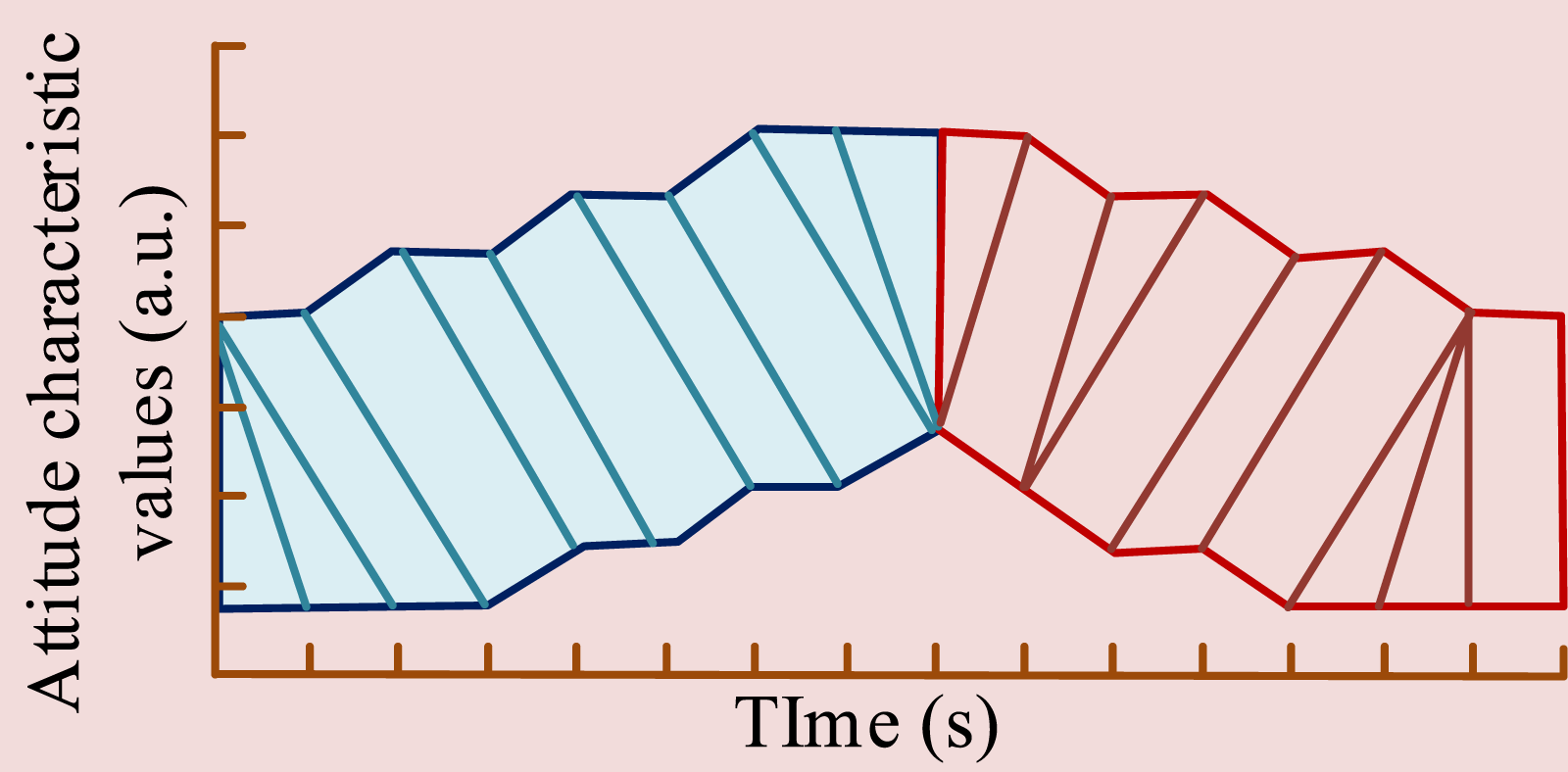


The blue and red parts in Figure 3 correspond to posture time series of different lengths, which exhibit inconsistent lengths due to differences in action duration, acquisition frame rate, and other factors. How to deal with the inconsistent time series is an important issue in the construction of a posture matching algorithm system for human differences and posture characteristics. However, in the process of action posture matching, the length of the video frame sequence between the action to be matched and the template action is often inconsistent. 25 The construction of a posture matching algorithm system based on individual differences and attitude characteristics provides important theoretical and data support for the construction and optimization of this system.
Design of PET optimization method integrating posture features and action posture matching algorithm
In PET, it is the key to improve the teaching effect that teachers can accurately identify and guide students’ movements and postures.
26
However, due to individual differences and the complexity of posture features, it is often challenging to achieve accurate matching and feedback guidance. The PET optimization method can not only deal with the inconsistent time series of long and short lengths but also identify and mark the parts of the action that do not meet the standard by defining the deviation factors. The difference characteristics of action posture are shown in Figure 4. Characteristics of movement and posture differences.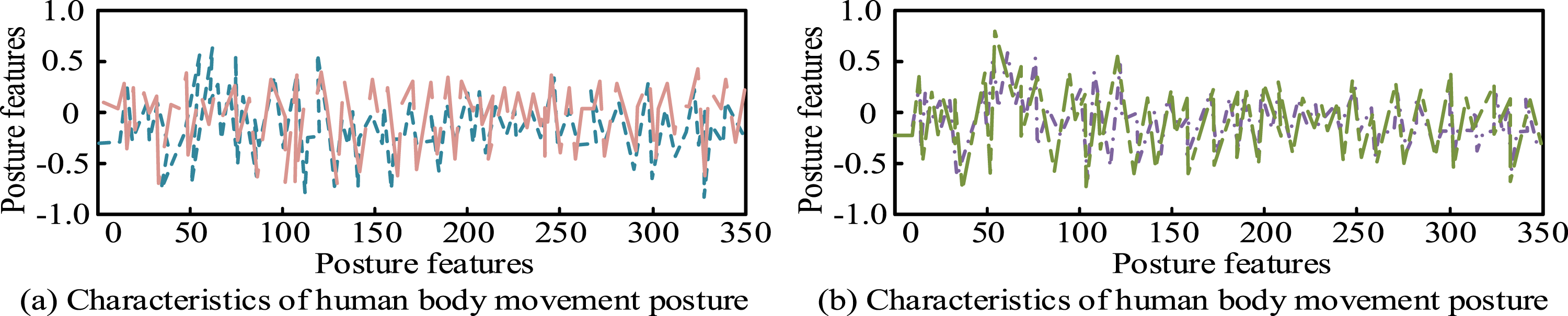
In PET, the difference in movement and posture is an extremely important factor.
27
These differences include the angle, speed, and strength of limb movements, which directly affect the execution and accuracy of movements. The similarity of the actions in the two frames is judged by solving the Euclidean distance of the action gesture characteristics, and the mathematical expression of the similarity of the actions in the Optimization method module for PET by integrating posture features and motion posture matching algorithms.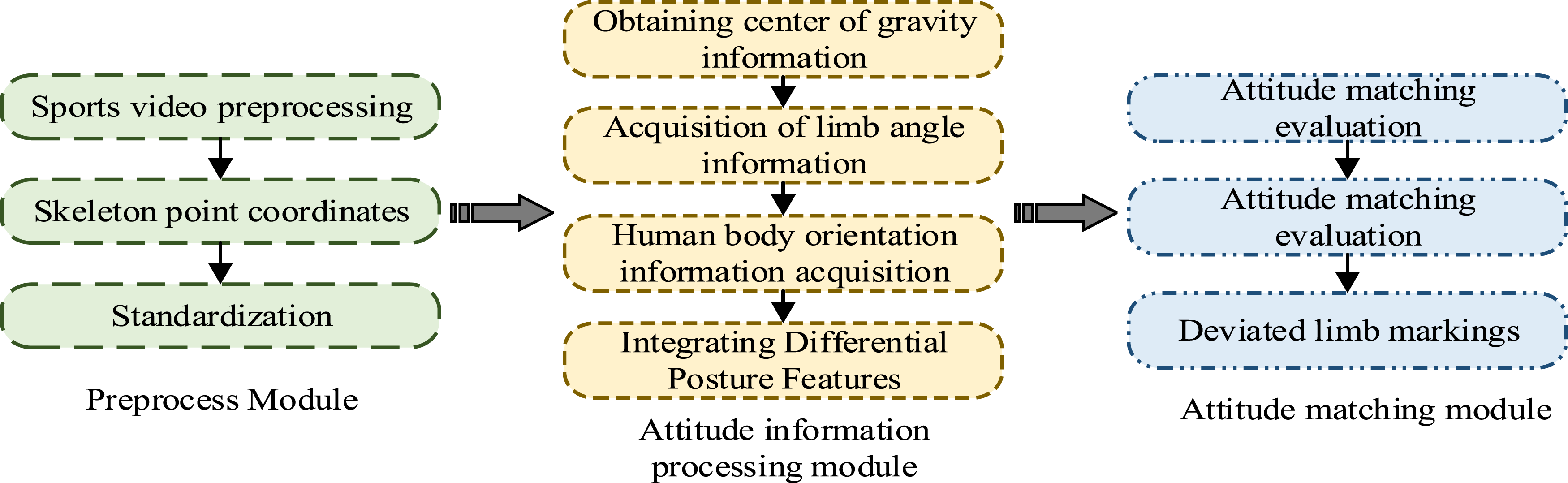






This module consists of a preprocessing module, an attitude information processing module, and an attitude matching module. The preprocessing module first performs motion video preprocessing, then extracts bone point coordinates and normalizes them. On the basis of preprocessing data, the posture information processing module sequentially obtains information on the center of gravity, limb angle, and human body direction, and then integrates differentiated posture features to accurately extract posture key data. The posture matching module achieves precise posture matching and anomaly recognition through posture matching assessment and abnormal limb labeling. In the design of PET optimization methods, a complete set of optimization method modules is formed by integrating posture features and action posture matching algorithms to all aspects of the teaching process. In addition, the module also has the function of processing the frame of the video and capturing the video frame. This study mainly uses high frame rate cameras and Openposture posture estimation tools to collect data in real-life PET scenarios such as gymnastics and martial arts. Openposture, as a skeleton point and skeleton detector, can predict human facial keypoints, limb skeleton points, hand joint points, etc. in image and video. It has excellent robustness in single or multi-person posture estimation. Openposture output is a data file, available in JSON, XML, and YML formats. For image processing, each image generates a data file containing the coordinates of human skeletal points. For each video, the position coordinates of human joint points in each frame of the video are obtained. After obtaining the original keypoints, the study uses coordinate normalization to unify the coordinates of all keypoints to the interval of [−1,1] or [0,1]. Missing points are filled in using the previous frame data, and abnormal frames are removed through motion amplitude detection. Meanwhile, for raw data containing multiple action segments, this study segments actions based on posture change rate and completes data preprocessing. The research method collects the coordinates of key points (such as elbows, knee joints, shoulders, ankle joints, etc.) when students perform sports movements, and extracts individual differential features. Differences include human body parameters such as height and weight, as well as dynamic posture parameters such as angle, speed, rhythm, and stability during action execution. Subsequently, an individual model is established to form a “body characteristic model” for each student, recording their current ability level and physiological structural differences, providing a basis for subsequent teaching adaptation. Then, through the posture matching algorithm, the action deviations of students are automatically identified during the matching process. Finally, based on the algorithm matching results, teaching tasks are customized for each student, effectively addressing the common individual differences.
Systematic testing and analysis of PET optimization method and posture matching algorithm based on human differential posture characteristics
Systematic testing and analysis of posture matching algorithm integrating human differences and posture characteristics
To verify the performance of the posture matching algorithm system that integrates human body differences and posture features, experimental analysis and discussion are conducted. Detailed system parameter design is carried out in the analysis to ensure the precision and accuracy of each step. In terms of software, the operating system used for testing and analysis is Windows 10 Professional. All algorithm implementations are based on the TensorFlow 2.4 framework, and data processing mainly relies on NumPy 1.19 and Pandas 1.2.1 tool libraries. The visualization is done by applying Matplotlib 3.3.3 and Seaborn 0.11.1. In terms of hardware, the hard drive is a Samsung SSD 970 EVO Plus 1 TB, and the motion capture system is a Vicon Vantage V5 device. All tests are carried out in a 500 m2 indoor sports hall environment.
All experimental data in this study are collected independently. The motion capture system is Vicon Vantage V5 (16 high-precision infrared cameras, frame rate of 200 Hz, spatial positioning error less than 1 mm). At the same time, a data synchronization system is equipped to synchronize video and sensor data, avoiding frame sequence misalignment. The volunteer participants in this study are aged 18 to 25 and all signed informed consent forms. They do not have significant movement disorders or serious cardiovascular diseases, including various body types such as tall, short, fat, and thin, with BMI ranging from 18.1 to 28.9. Six typical teaching movements are collected, each of which is a common basic movement in physical education classrooms (stretching, chest expansion, kicking, lateral movement, rotation, and jumping). Each type of action is repeated 5 times per person for a complete cycle, each lasting about 5–10 seconds. The original frame rate is collected at least 1000 frames to ensure sufficient time series accuracy. Using precise system parameter design, a complete software and hardware environment for system test and analysis is built to ensure the precision and accuracy of test analysis. Figure 6 shows the response rate and processing effect of the algorithm system in the indoor sports hall scene. Response rate and processing effect of algorithm system in indoor sports hall scenes.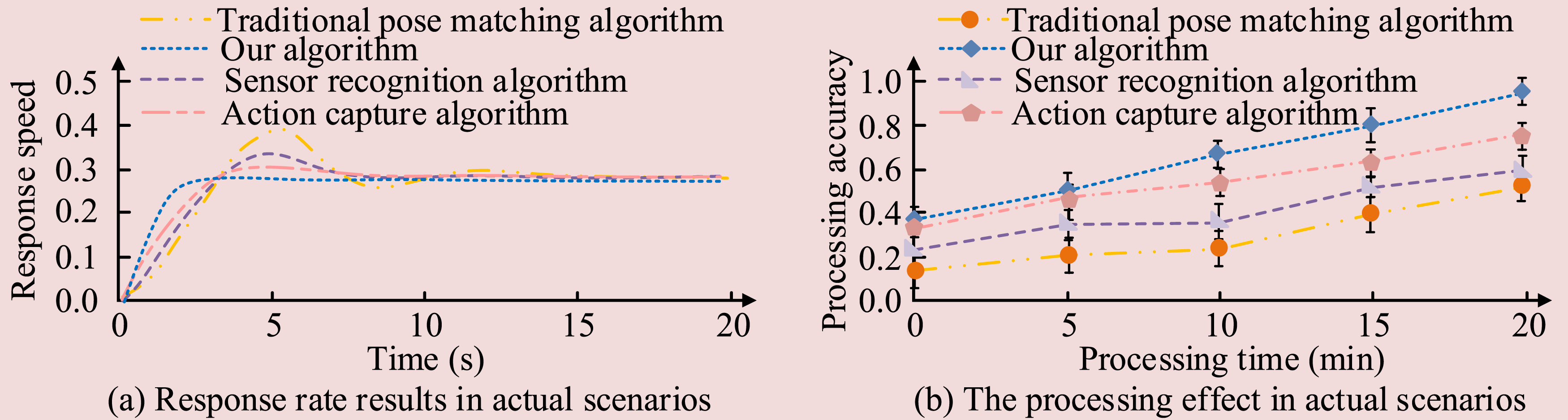
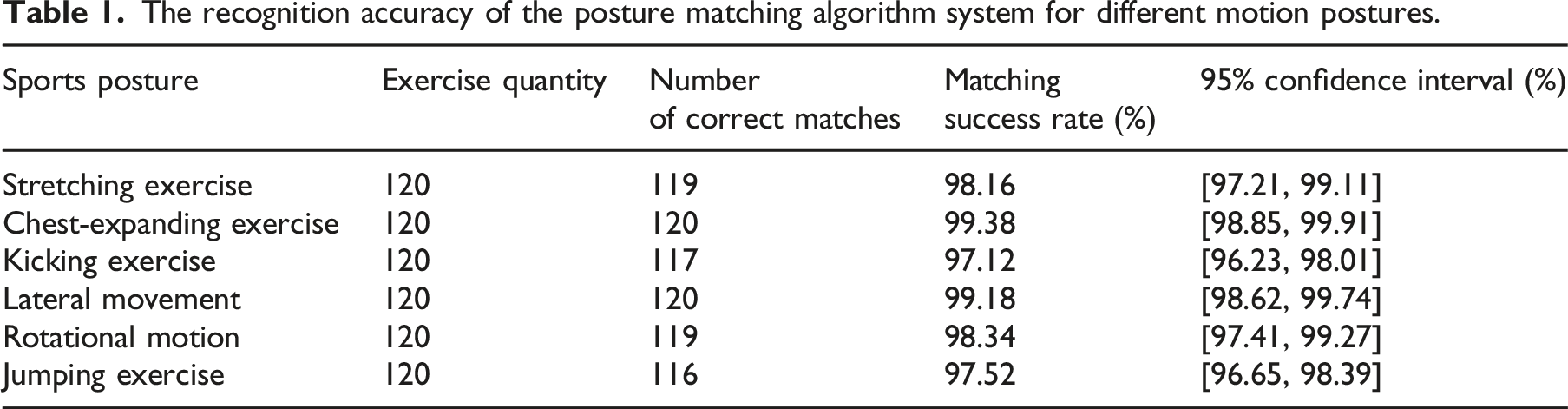
The recognition accuracy of the posture matching algorithm system for different motion postures.
One-way ANOVA results.
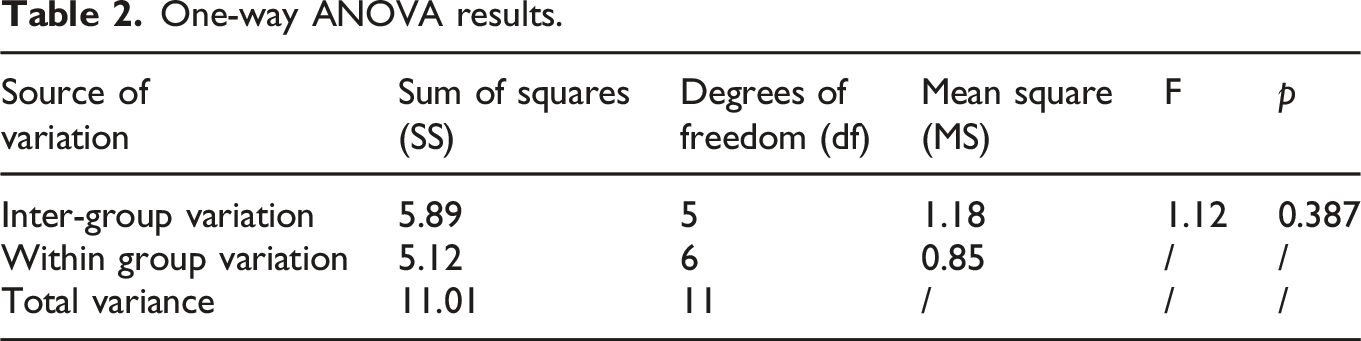
According to Table 2, inter-group variation reflects the differences between groups with different movement postures, while intra-group variation reflects the inherent fluctuations of intra-group data. The F-value is 1.12 and the p-value is 0.387. A value greater than 0.05 indicates that there is no significant statistical difference in the recognition accuracy of the algorithm under different motion postures. From a statistical testing perspective, the differences in posture recognition performance can be attributed to random fluctuations, and the algorithm has overall consistency in recognizing different postures. The stability results of the algorithm system in the face of different human body differential features and posture features are shown in Figure 7. Stability results of algorithm systems in different human body features and posture features.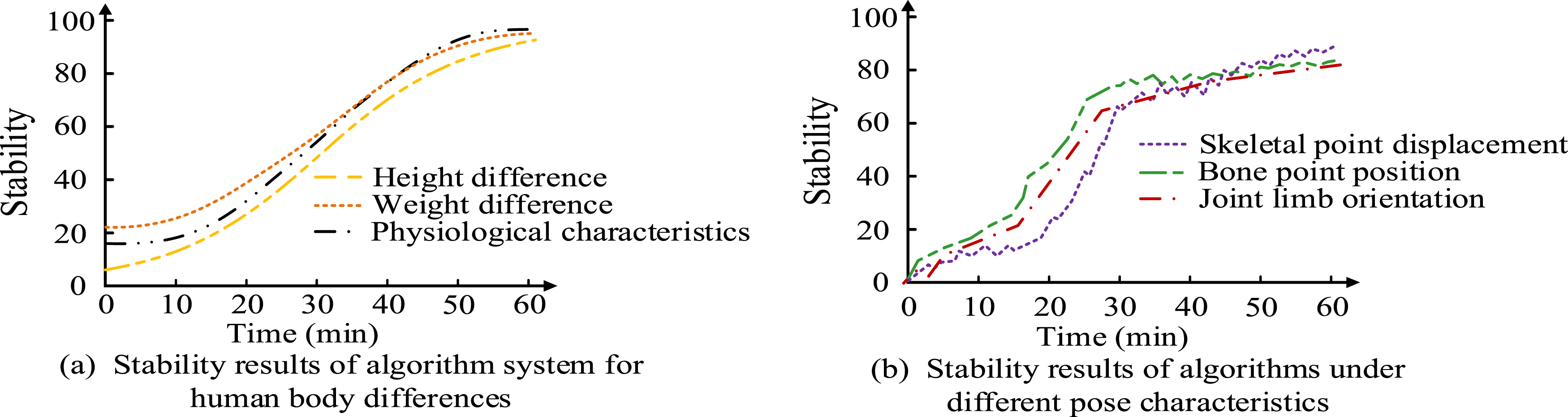
Figure 7 mainly verifies the recognition stability of the algorithm system for human differential features and posture features. The identification of human differentiation characteristics mainly includes weight differences, height differences, and gender differences. With the passage of time, the identification of these differential features gradually stabilizes, and the stability reaches 96.59%, 93.26%, and 98.53%, respectively. The results show that the algorithm can effectively identify and deal with various human differential features. The system also provides in-depth recognition and analysis of posture features. The main recognition features include the displacement of the bone point, the bone point’s position, and the orientation of the joint limb. Similarly, with the passage of time, the recognition of these posture features also shows a stable trend, with recognition stability of 91.35%, 83.66%, and 82.97%, respectively. The efficiency and accuracy of the algorithm in identifying and analyzing posture features are verified. It is verified that the algorithm system shows good stability and accuracy in dealing with human differential features and posture features. In addition, reference 7 and reference 8 are compared with the proposed techniques to compare the accuracy of human posture recognition under different models, as shown in Figure 8. Accuracy test results of human posture recognition under different models.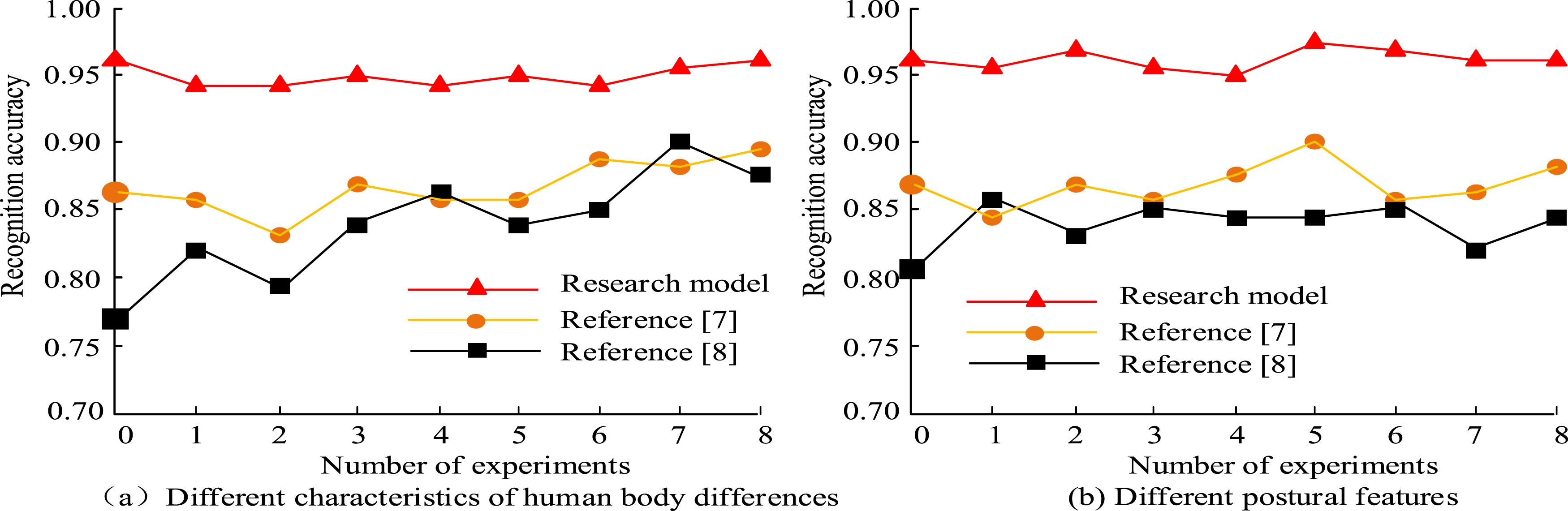
Figure 8(a) shows the test results under the condition of human body differences, in which reference 7 and reference 8 are selected for comparison, and a total of 8 tests were conducted. According to the test curve results, there are significant differences in the accuracy of posture recognition among different models. The best performing model among them is the research model. In 8 experimental tests, the average attitude recognition accuracy is above 0.94, and the stability is better than other technologies. Compared with reference 8, reference 7 has a higher recognition accuracy, with a mean of 0.886, while reference 9 performs the worst and has significant fluctuations in early testing, with a mean recognition accuracy of 0.856. Figure 8(b) shows the test results without posture features. The research model still has significant advantages in stability and accuracy, with an average posture recognition accuracy of 0.956, while the average recognition accuracy in references 7 and 8 are 0.876 and 0.858, respectively. The research technology has more advantages in practical testing.
Experimental analysis of PET optimization method based on human differential posture characteristics
To comprehensively evaluate system performance, the selected indicator system covers two dimensions: skill mastery level and changes in physical fitness, supplemented by error indicators at the algorithm level. Among them, the skill mastery level mainly measures the accuracy of participants’ imitation of standard movements, including posture matching error (calculated by average Euclidean distance and angle difference) and motion stability (evaluated by posture change variance and joint jitter amplitude). The physical fitness indicators are reflected through standard physical fitness test items, including sitting forward bend, standing long jump, standing with one foot closed, and squatting times. These indicators have comprehensive coverage and strong operability, and are closely related to PET in terms of movement stability and rhythm synchronization. Flexibility and balance indicators can reflect the adaptability differences between different body types and are suitable for performance evaluation of the system. Regarding individual differences, such as differences in body shape, flexibility, and muscle control, which may affect the reliability of evaluation results, normalization processing is introduced in the study. On this basis, some items are modified and adjusted, and the reliability of each scale is tested by using the Corrected Item Total Correlation (CITC) and Cronbach alpha (α) coefficients output by SPSS25.0 software in the internal consistency coefficients of each part of the scale. To further evaluate the acceptance and practicability of this system in teaching practice, a set of standardized satisfaction questionnaires is designed to measure the subjective feelings and usage experience of participants towards the posture matching system in the teaching process. This survey is designed using the Likert Scale (1–5 points). The questionnaire content is divided into five dimensions, with a total of 15 questions. This questionnaire is comprehensively constructed based on the technology acceptance model and the PET behavior model, and it is targeted and structurally valid. After completing all the training and tests, each subject independently fills out the anonymous questionnaire. Each question is scored from 1 to 5 points. The average is calculated by dimension, and the average of the overall satisfaction is calculated. Figure 9 shows the comparison of individual satisfaction results for different teaching methods. Individual satisfaction results of different teaching methods.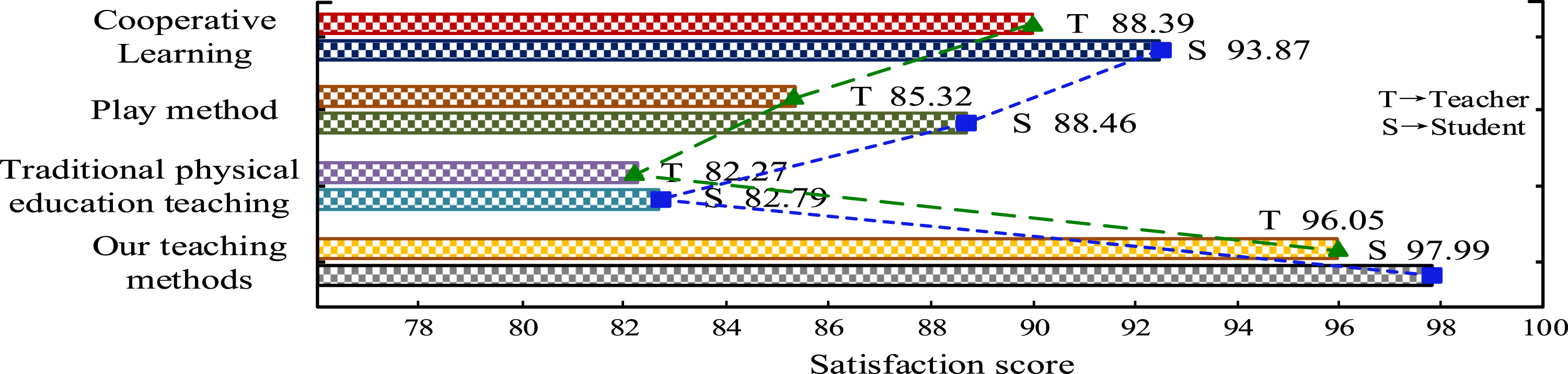
In Figure 9, the individual satisfaction results of different PET methods are compared in the PET optimization method based on human differential posture characteristics. Among them, the game-based teaching method refers to integrating PET content into structured game activities. Through rule setting, task challenges, and interactive mechanisms, it stimulates students’ participation interest and physical performance, thereby achieving the teaching goals. The research method, as one of the comparison items, demonstrates its advantages in terms of interest. There are significant differences in the individual evaluation index of students and teachers between cooperative teaching methods, game teaching methods, traditional PET methods, and newly PET optimization methods. The individual evaluation index of cooperative teaching method is 88.39 and 93.87, indicating that the method has achieved high satisfaction. The individual evaluation index of game-based teaching method is 85.32 and 88.46, indicating that the satisfaction of this method is slightly lower than that of cooperative teaching method. The individual evaluation index of traditional PET teaching method is 82.27 and 82.79, indicating low satisfaction. The PET optimization method using differential posture characteristics of human body reaches 96.05 and 97.99 in the individual evaluation index of students and teachers, respectively, which becomes the highest satisfaction among all teaching methods. The data in Figure 9 verify that the introduction of the modeling of posture personality differences and the dynamic matching mechanism is the key to improving the effect of personalized education and teaching. Compared with traditional and static methods, the optimized method can identify the quality of students’ movements more accurately, provide real-time feedback, and make adaptive adjustments according to different body types and movement styles. It has obvious practical value and promotion potential. The teaching effect of applying the optimization method of PET is shown in Figure 10. The teaching effect of applying optimization methods in PET.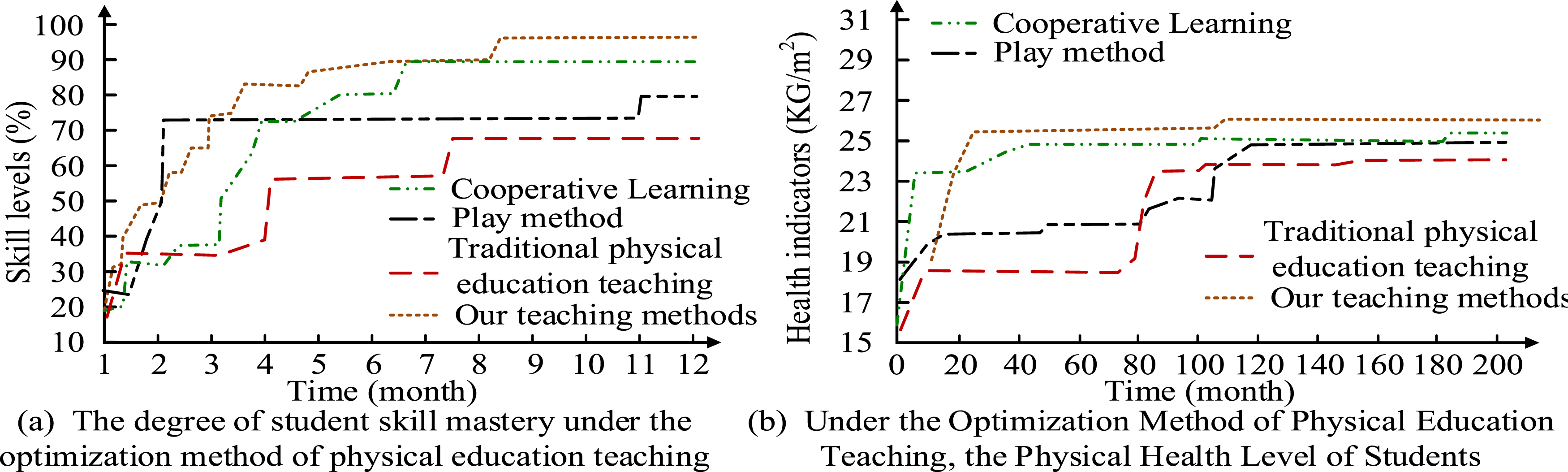
In Figure 10(a), the skill mastery level of students was improved under various teaching methods. The skill mastery levels of students were 90.68%, 81.07%, 68.39%, and 95.25% under the cooperative teaching method, game teaching method, traditional PET method, and the newly proposed PET optimization method, respectively. In Figure 10(b), the physical fitness level of students was 25.26 KG/m2, 24.68 KG/m2, 23.41 KG/m2, and 25.46 KG/m2 under the four methods, respectively. The results showed that the optimization method of PET integrating human differences and posture characteristics could significantly improve students’ skill mastery and physical fitness level, thereby improving the overall effect of PET. The feasibility of this PET method in actual teaching is shown in Figure 11. The feasibility of PET methods in practical teaching.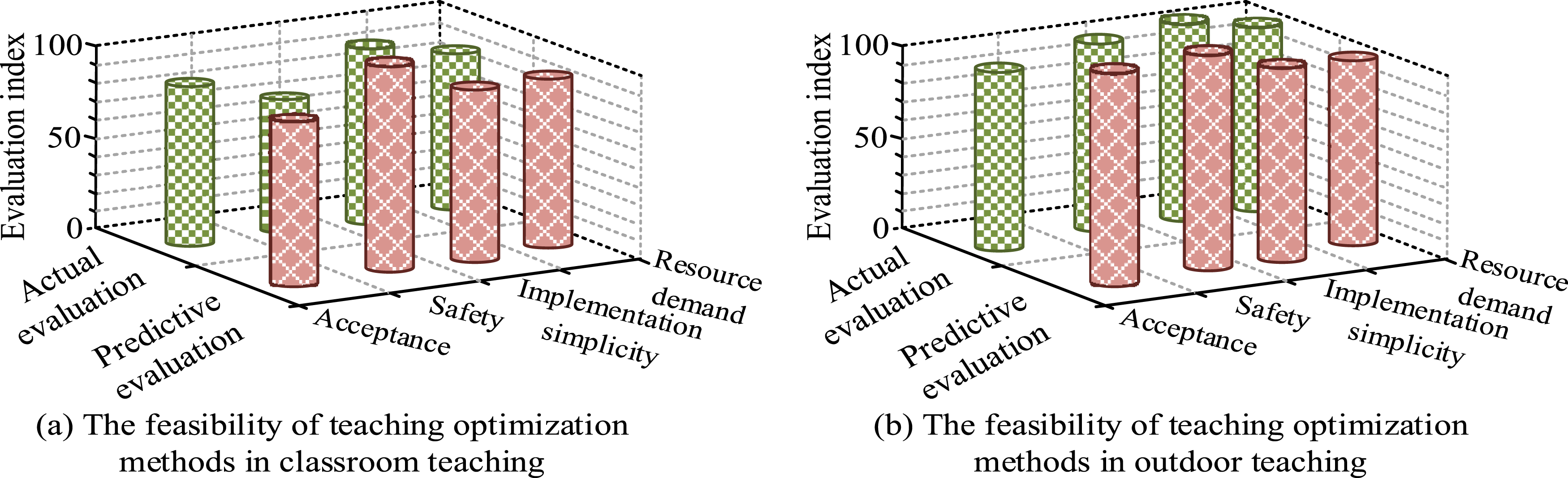
In Figure 11, the feasibility of the PET optimization method in classroom teaching is mainly quantitatively analyzed from four aspects: student acceptance, safety, simplicity of teaching, and demand for teaching resources. In Figure 11(a), the student acceptance, safety, simplicity of teaching, and feasibility index of teaching resource demand are 81.68, 95.17, 87.22, and 89.43, respectively. The pedagogical method is highly evaluated for its feasibility in classroom teaching, especially in terms of safety. In Figure 11(b), the indices of student acceptance, safety, ease of teaching, and feasibility of teaching resource requirements in classroom teaching are 91.05, 94.79, 89.67, and 90.73, respectively. The results show that the optimized teaching method improves the level of student acceptance, the simplicity of teaching, and the demand for teaching resources.
Conclusion
PET is an important task to deal with the differences and posture characteristics of the human body. To improve the teaching efficiency and optimize the teaching method, a posture matching algorithm based on the differential posture characteristics of human beings was proposed to optimize the PET method. The posture matching algorithm based on human differences and posture characteristics was used for testing, and compared with the traditional algorithm system, sensor recognition algorithm, and motion capture algorithm. The results showed that the response time of the proposed algorithm was stable in only 3.51 seconds, and the processing efficiency was as high as 74.05%, which was significantly better than other algorithms. The algorithm showed extremely high accuracy and efficiency when dealing with various human differences and posture features. The recognition accuracy of different movement postures was more than 97%, especially the matching success rates of chest expansion and lateral movements, reaching 99.38% and 99.18%. The individual satisfaction of the algorithm also surpassed that of cooperative teaching methods, game teaching methods and traditional PET methods. The individual evaluation index of students and teachers reached 96.05 and 97.99, respectively, and they received a high level of satisfaction. The integration of human body differences and posture characteristics into PET not only improves the teaching efficiency but also improves the teaching quality. Unlike CNN and LSTM, which rely on black box mode for visual feature learning, this algorithm directly models human biomechanical features through the Euclidean distance and cosine similarity of bone points. This solves the problem of traditional algorithms being insensitive to differences in bone length. The research algorithm uses sliding DTW instead of LSTM recursive calculation, which is more suitable for real-time feedback requirements when processing variable length motion sequences in teaching scenarios. The research provides new possibilities for the personalization of PET and also provides a valuable reference for follow-up research.
However, there are still certain limitations to the research. When dealing with high complexity movements such as gymnastics somersaults and martial arts routines, the matching success rate drops to 92.3%, exposing the shortcomings of the algorithm in capturing high-frequency dynamic features and multi-joint collaborative analysis. Future research will be optimized from three aspects. The first point is to expand the coverage of the dataset, plan to collect more samples containing special body types and complex movements, and build a multimodal database. The second point is to integrate multi-source data such as inertial sensors and electromyographic signals, develop cross-modal feature fusion algorithms, and improve recognition accuracy in complex scenes. Third, deep integration of VR and augmented reality technologies should be considered to develop immersive personalized teaching systems.
ORCID iD
Yongtao Shi https://orcid.org/0009-0006-3494-0297
Footnotes
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.