
Abstract
This paper describes the development of a programmable composite material and investigates its application in architecture as flexible and controllable surfaces. The composite leverages qualities found in the field of soft robots, that is, strength, precision, and the ability to change shape through vacuum actuation. It is an exploration of a range of applications for shape shifting composites within different phases of architecture. This research has deployed a controlled form-actuator of a designed surface as a reusable and flexible approach for concrete formwork and as a continuously changing spatial element, which aims to create a more engaging relationship between habitat and inhabitant. The design method linked to this composite aims to converge technology and material behavior and therethrough create a more linear process from design to construction. This paper elaborates on the design, simulation and fabrication methods, and their development through empirical research from individual actuatable cells to a controllable multi-cell surface and associated design tool.
Keywords
Introduction
This research project aims to investigate how architecture in its different phases, from design, over production, and occupation can become more flexible and adaptable and how the processes linked to it could therethrough become more linear. It does this through the exploration of a family of modular and actuatable systems and the development of a digital simulation and prediction tool. The objective was to produce two functioning systems and to demonstrate the feasibility of extremely flexible material systems not only within inhabited, dynamic spaces—that is, as spatial installations, engaging the inhabitants through active geometrical variation—but also within the production of architectural elements, namely complex concrete panels. The actuatable composite material developed in this research, leverages embodied computation—inspired by soft robotics—to control the deformation of an object.1,2
Current building methods are generally divided into discrete phases and delegated by different people, which often results in inert and static spaces preventing the freedom of individual adaptation or flexibility over time. 3 Advances in technology have allowed for complex computational processes, that enable the drawing of designs released from physical properties. However, the realization of the represented in physical space involves numerous complicated, time-consuming processes and in many cases lead to divergence between the vision and the built. Fabrication processes to assimilate the physical to the digital not only generally contribute to a large extend to the production of solid waste but also to high cost of the construction. The challenging material consumption in the building industry could be considerably reduced through working with consideration of physical properties instead of shaping materials into non-according forms.4–6 This research project investigates how the design process as well as our understanding of built space—which is not rigid after the completion of its construction, but able to adapt physically to the occupier—could change while working with this artificial composite and its predefined material properties. Instead of sculpting the design into a rigid material, the application of this actuatable composite and its associated tool to design enables the geometry to directly emerge through the material. The focus of this research is the exploration of the degree of control and flexibility that can be achieved through the application of a computed, artificial material. It aims at bringing digital and physical design methods closer together. The soft composite described in this paper is entirely made out of malleable components, avoiding mechanical hinges that are often prone to obsolescence. 7
Background
Flexible architectural spaces
The flexibility of space can be described as the ability to adjust to different occupations and needs of the occupant. In their book, “kinetic architecture,” Zuk and Clark, invite to rethink architecture and to envision it as a non-static environment, which can continuously change over time. If we would think about architecture as a spatial configuration which is in constant change, we must understand it as a “continuous process,” which “will not stop when the building is erected.” 8 Flexibility can be the redundancy of space, which allows a changing accommodation of different events through the movement of certain architectural elements. This can be exemplified through the scenario of the modernist open plan, in the Rietvelt-Schröder House in Utrecht, by Rietveld or Pierre Chareau’s Maison de Verre in Paris. It is the design of loose-fit spaces, which can be manually transformed to give space to alternating functions, occupants, and climates. The ability to transform a space enables it to become more productive, to be used for different purposes or activities and by different groups at the same time. It changes the engagement of the occupant with the architecture, who can actively reconfigure the given space through the deformation of kinetic elements in it. This engagement allows the space to evolve and change over time and to take away a certain degree of design control from the architect. 9
The advancements in synthetic polymers in the 20th century, allowed the emergence of membrane structures, deploying their technological potential and at the same time their employment as pneumatic space generators. 10 The development of airtight and waterproof materials allowed the encounter with soft, inflatable architecture in the 1960’s, and the critique of the hardness and rigidness of modernism. 11 The flexibility of these spaces is defined by their deployability: the fast change from flat to spatial spaces and their easy transportation, enabled by their light weight. The shapes generated through such methods are controlled through cutting pattern and the way the flat, and non-inflated surfaces are joined together. Through the creation of a low, positive internal air pressure the membranes are deployed to form elements categorized as air structures, beams, and cells. 12 Projects like the Dyodon, by J.-P. Jungmann or A. Stincos “Exhibition Hall for Objects of Everyday Life,” talk about transparencies, light, softness, flexibility of space, and easy transportability. 13 The shift of inflatable singular domes to the inflation of an aggregation of cells and tubes led to a more flexible, transformable, and programmable architecture. 14
A particular challenge of this kind of flexible space is the geometric control of shape shifts, across multiple states. Flexible spaces and shape changing spaces have typically been actuated through mechanical and pneumatic action, but they can also be actuated through the programming of a material performance. 15 Shape deformation can be achieved through the application of smart materials. While these are activated through external stimuli, the actuation through air enables easier control and offers more robustness.7,16 This research focuses on the implementation of an actuation method inspired by soft robots as a composite material, to guarantee controlled shape changing qualities. Unlike rigid robots, which are controlled through mechanic hinges and actuated through joint movements, soft robots are generally made entirely from malleable components. They are often actuated through internal pressure change of their contained fluidics. Usually, architecture employs and benefits from soft actuators as grippers and tools in order to make processes between human and machine safer. However state-of-the-art research is investigating the actuation of architectural elements through the application of soft actuators as building material and their related qualities to control shape deformation, temperature, noise, spatial atmosphere, and to enable interaction between the space and the occupant. For instance projects by Ahlquist et al. and by Baranovskaya et al. investigate the actuation of shape through inflatables in connection with bespoke knits.17,18 A different approach to controlled shape generation can be seen in “Pneusystems” by Velikov et al., where through differentiation in geometries of cells in an assembly a controlled shape can be actuated through pneumatic actuation. 10 While architectural projects have mainly found interests in the formation, shift, and control of shape through compressed air, this research is inspired by soft robots that leverage deformation precision through the employment of a vacuum source as actuator. This actuation source substracts the air from the soft-actuated modules and forces an internal structure to collapse and interlock. This jamming of form-giving material is called a mechanical layer jamming mechanism. This mechanism of jamming designed geometries rather than homogeneous granular materials allows for a high level of deformation precision.1,19 The embodied controllability through geometrical properties, allows to actuate the composite material in a programmed manner and at the same time achieve flexible and continuously changing spaces through changes in actuation and assembly.20,21
Flexible production
While flexible molding methods have been developed since the mid-20th century, they have still not found common application in the building industry. Freeform geometries enabled by computational design methods provide a renewed motivation. When discretizing freeform doubly curved facades, practically all panels are individually curved surfaces. 22 Typically the production of concrete surfaces however does not involve flexible molding systems and falls back on extremely material-, time-, and cost-intense processes, producing non-reusable rigid molds through subtractive processes in wood and foam. 5
Flexibility of space is not only a desirable quality in the occupational phase of architecture—generating soft spaces—but also very beneficial to the production of architectural elements. State-of-the-art research investigates flexible and reusable molds to find “material-saving, labor-reducing and cost-effective” construction methods. 5 Although amongst these completely formwork free methods—mainly developed as additive manufacturing processes—are currently studied, this research is interested in the programmability of deployable geometries and their employment as reusable and adaptable formwork.23–25 Programmed surfaces for molds can be generated through mechanical actuation, such as the molding method produced by Adapa Company in Denmark, or as already described in the 1960’s by Renzo Piano. Here, individually controlled vertical pistons are aligned in a regular grid and support a flexible surface serving as a base for the reconfigurable formwork.26,27 Unlike this mechanically controlled actuation method, the research described in this paper presents a self-actuated deployment and forming of shape.
As advances in polymer textiles and with it the interest in inflatable structures grew in the 1960’s, deployable structures were not only used as space generators, but also as novel methods to construct and freeze the generated soft shapes. Amongst others, Bini and McLean developed a method, which allowed to reduce skilled craftsmen on site, construction time, and material consumption through the application of a construction process, which leverages an inflated, flexible mesh as a reusable formwork for concrete domes. 28 Advances in technologies allow to generate bespoke, programmed shapes, which, when deployed or prestressed form the designed freeform geometries. Such structures are extremely lightweight and in a non-deployed state allow for simple transportation in addition to their benefits of fast deployability of complex structures on site. Such explorations have amongst others been described by Konakovic-Lukovic et al., who propose the generation of deployable structures forming designed shapes through the programming of auxetic cutting pattern in planar sheet material. 29 While these structures are not developed to be used as formwork, they still inspire this project as an understanding of shape programming in flat materials. A state-of-the-art research in the field of stay-in-place formwork for lightweight concrete structures is being explored by Popescu et al. 5 This project elaborates on the generation of bespoke knitted formwork using prestressed technical textiles as a mold for thin concrete shells. While this textile is employed as a sacrificial formwork and can hence only be used once, this approach to concrete shells presents a highly time-saving and lightweight solution.
Method
The objective of this research project is to explore the formation of shape through an adaptable, actuatable and flexible modular material system and its application throughout different architectural phases. A family of systems has been developed, whereof two varied by method of actuation have been further explored through practice-based experiments. While first probes, have demonstrated how the grading of geometrical features, such as wall thicknesses, edge heights or collision barriers, can give place to a large range of variation, this research has chosen to work with a single module pattern. As each of these modules can form a doubly-curved surface, which varies through changes of the warped hexagonal geometry, the material system, being an assembly of modules is limited to a design space of double curved surfaces. Earlier stages of this research project have been described by Kieffer and Nicholas. 30 Different iterations of module probes have fed into the development of fabrication, simulation, and design processes for this actuatable material system. It is distinguished by its ability to recreate a digitally designed shape in physical form through the defined placement and orientation of modules and the possibility to reconfigure a large range of geometries with a small number of modules.
The first method describes a material system, that could be imagined within occupied architectural spaces. This experiment emphasizes the integration of flexible elements within occupied spaces to form more engaging built environments. The assembly of multiple individually actuated modules allows the control and shift of shape within a large design space of a single tessellation pattern. Modules are shifting between binary states—fully actuated or not actuated. They have of course a moment of transition, but have not been created to be locked in a transitional position.
The second experiment demonstrates the application of a soft material composite within the construction of architectural elements. Through its reusability and the formation of different actuated surfaces through reconfiguration of modules, this method proposes a programmable and low-material intense process for the casting of complex concrete elements. This experiment does not allow the actuation of individual modules. All the participating modules are assembled to form one homogeneous surface, which can be in actuated or non-actuated state.
The modules
Every module contains a form-defining structure, which is 3D printed through Fused Deposition Modelling (FDM) using a Thermoplastic Polyurethane (TPU) filament, that allows the formation of flexible, bendable geometries. Through grading of material thickness in walls and hinges, parts of the structures can be defined to be soft, semi-stiff, or completely rigid. For this research walls of 2 mm and hinges of 3 mm thickness have been generated (overall module size 25 cm longest length, see Figure 1). While the small proportioned hinges, are when under pressure, forced to bend, the walls, which due to their hexagonal geometry are more resistant to collapsing, provide stiffness to the overall-structure. Therefore the designed actuated deformation can be controlled (Figure 2). Such artificial materials, which do not act through their material specific properties but rather through a programed composition of material, are called metamaterials. 31 The programmed deformation described by the modules in this research is a set of doubly curved surfaces, varying in curvature, which is associated to their printed geometry.

Explanation of a single actuatable module.
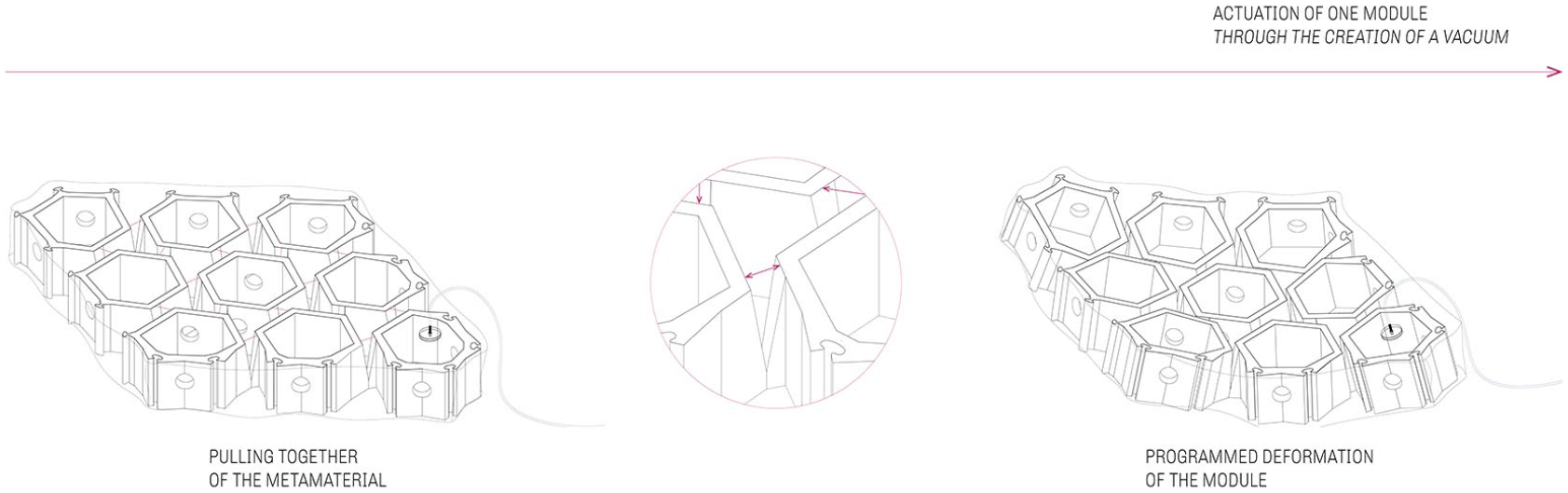
Actuation method of one module.
This metamaterial becomes actuatable through the addition of a pneumatic hull around it, composing a composite that can be activated and stiffened through vacuum. The creation of negative air pressure within the envelope forces the metamaterial modules to interlock and activates the programmed spatial shape. Transforming it from a planar assembly to a spatially bent surface.
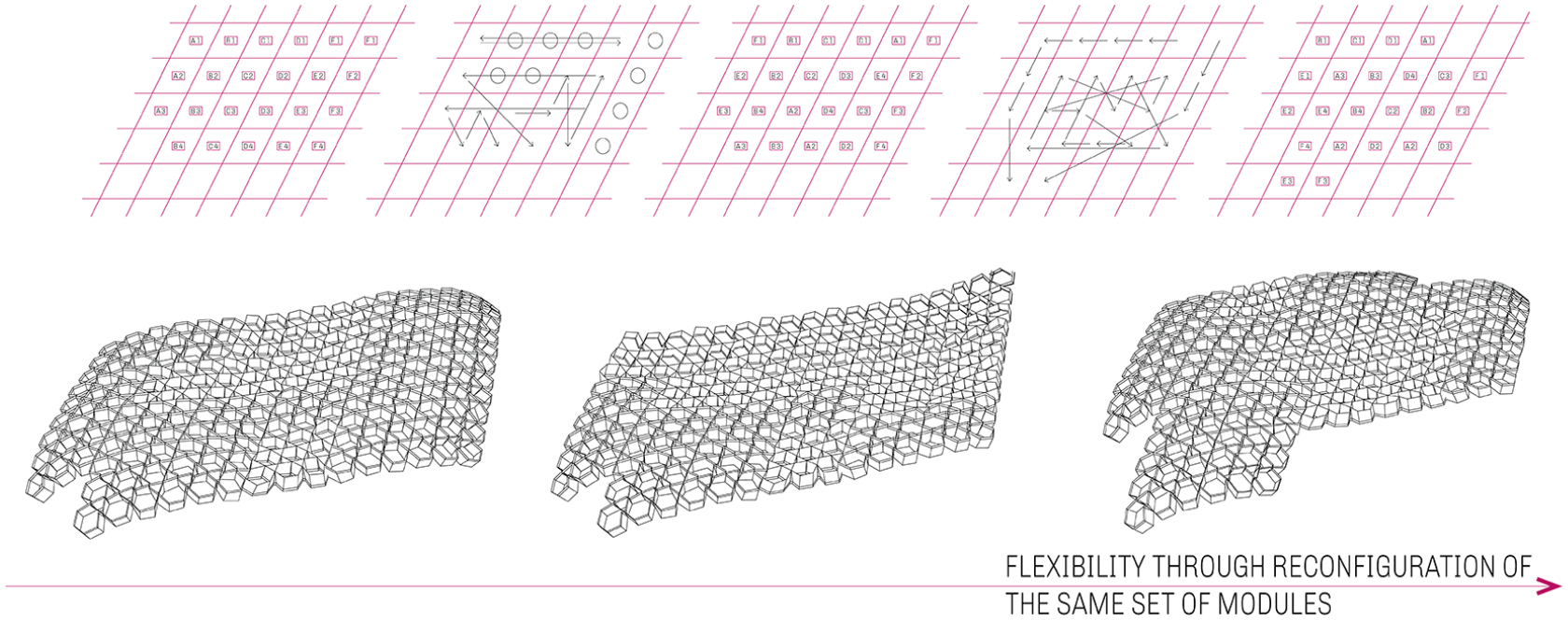
In every experiment conducted within this research, the flexible modules are fit within a regular, planar grid, connecting as homogeneous surfaces. The actuated shape can therefore be programmed through the use of differently graded modules (Figure 3), but also through the assembly pattern and the orientation of the individual elements in the system. Concave or convex surface curvatures can be achieved through simple changing of the orientation of the assembled pieces (Figure 4). The different compositions of modules within this research mainly differ in their method of actuation and assembly, which allows for different applications in architecture.

Module types used in this project.
Influence of the deformation through orientation of the modules.
The shape-shifter
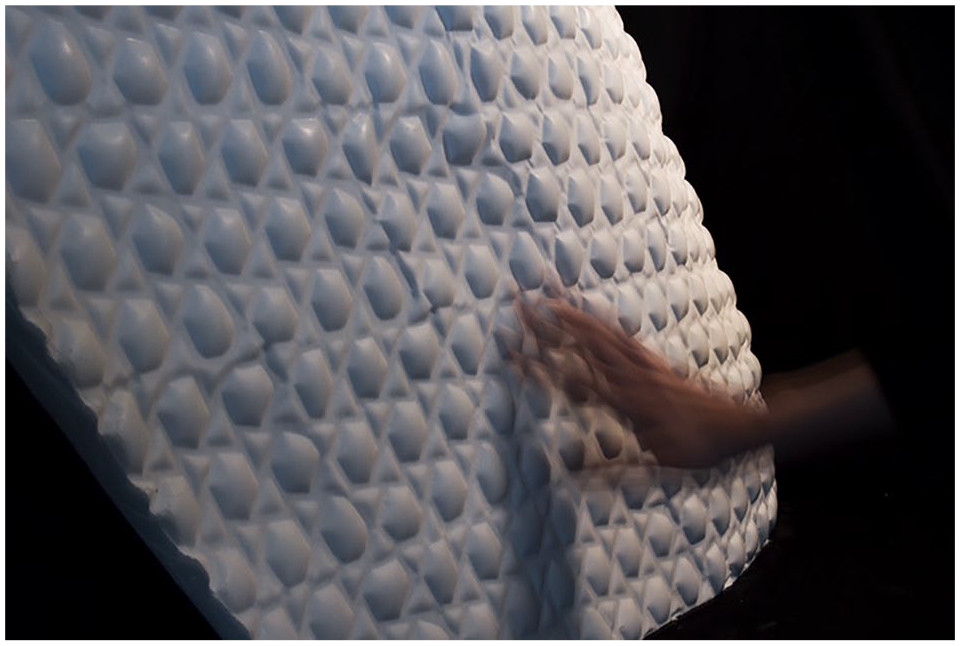
In a first study, modules without interlinked actuation were joined in a system and connected at the level of their pneumatic hull. The individual actuation of modules, allows a continuous shift of shape and the generation of spatial geometries within a range of possible morphologies. The demonstrator created in that experiment has been situated within an understanding of soft and flexible architecture, exploring its impact on the space as a soft and transformable element. At the same time this first experiment of assembled modules, served as an explorative experiment of the relation between module constellation and actuation with the formed geometry using a single set of modules. The 3D printed elements were in this study wrapped individually in small envelopes made of a transparent 0.2 mm LDPE foil. A large range of different artificial polymer foils have been tested, however, this specific material has been chosen due to its desired strength, transparency, and non-elastic properties. Being a thermoplastic material, the seams could be sealed through the simple use of a heat-welder. Every module has been individually connected to a source of air-pressure and could therefore be actuated independently from each other. With the addition of iridescent foils and the introduction of light to the installation the generation of spaces beyond its material qualities have been explored (Figure 5).
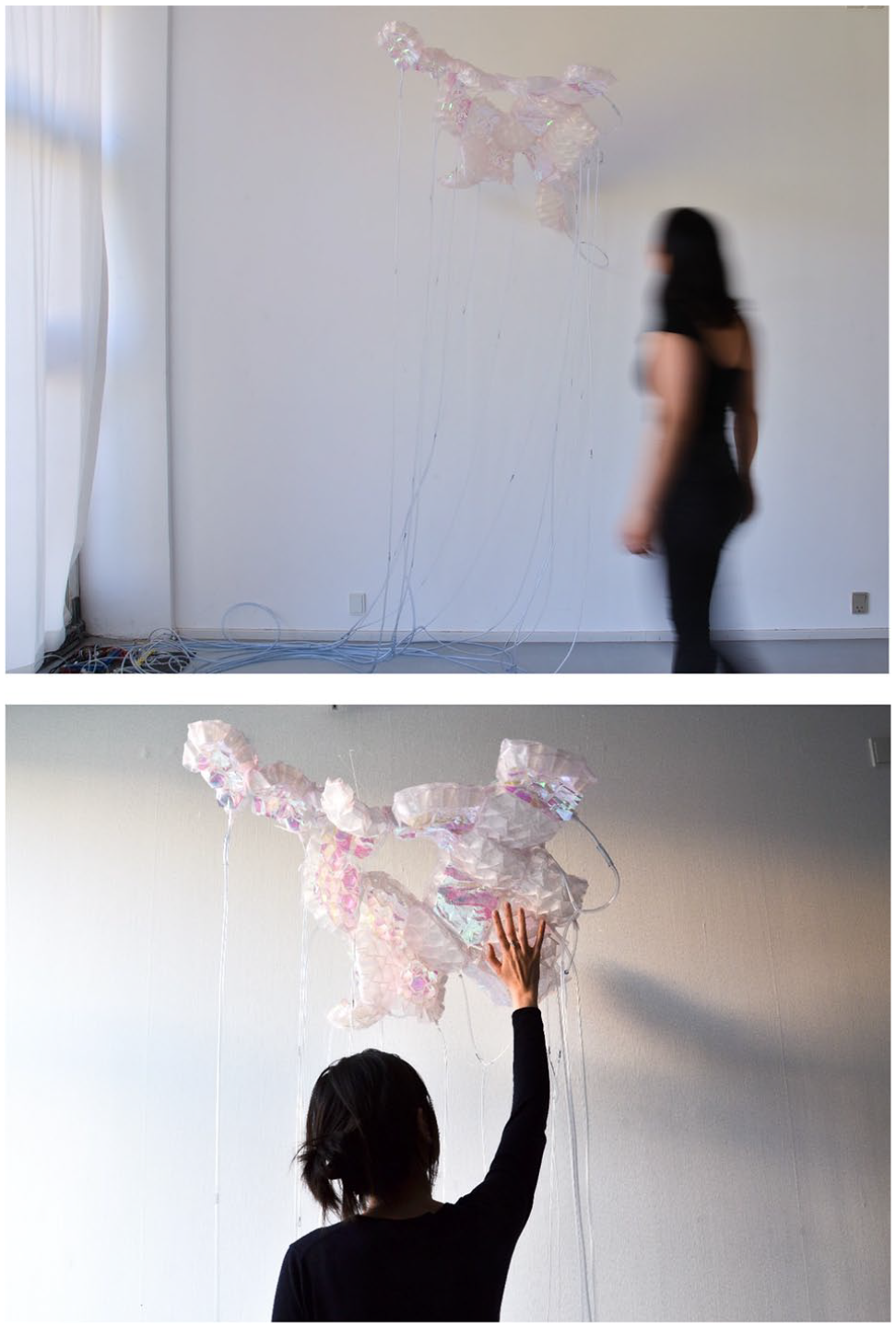
Soft-actuated material applied as spatial, flexible architectural elements.
Digital exploration of the design-space
The exploration of possible formation of shapes and their spatial qualities have not only been explored through physical demonstrators, but also through computational methods. An approximate simulation generated in the spring-based engine Kangaroo, and the implementation of it into an evolutionary solver enabled the digital understanding of the design-space’s richness generated through employing a single set of modular pieces. This computationally solved experiment shows the range of form actuation possible through a large variation of shuffling of assembly and orientation pattern of the involved modules. These two experiments mainly demonstrated the large range of flexibility of spaces generated from only a reduced set of modules and motivated the further analysis of the physical behavior to inform the digital approach to increase the level of control and precision of the design tool.
Flexible construction
A further experiment, investigated the possibility to employ this shape shifting material as a controlled composite to design physical surfaces. 30 This has been executed as a novel approach to fabricate complex concrete surfaces. For this study, the programmable composite has been employed as a deployable, designed surface, serving as flexible and non-sacrificial mold for concrete elements. The challenge posed by this approach was not only the robustness of this flexible composite material, but also the requirement of a much higher level of precision. Therefore, first tests have addressed the robustness through changes of used sheet materials for the pneumatic hull and adjustments of the printing parameters. Following developments have introduced the calibration of the computational prediction tool and transformed it toward a tool to design with the artificial material. The controllability of a deployable, spatial surface can contribute to the fabrication of complex concrete surfaces, as a simple and material-saving approach. The modules are reusable and can generate multiple geometries depending on their constellation (Figure 6).
Reconfiguration of the assembly for the production of different geometries.
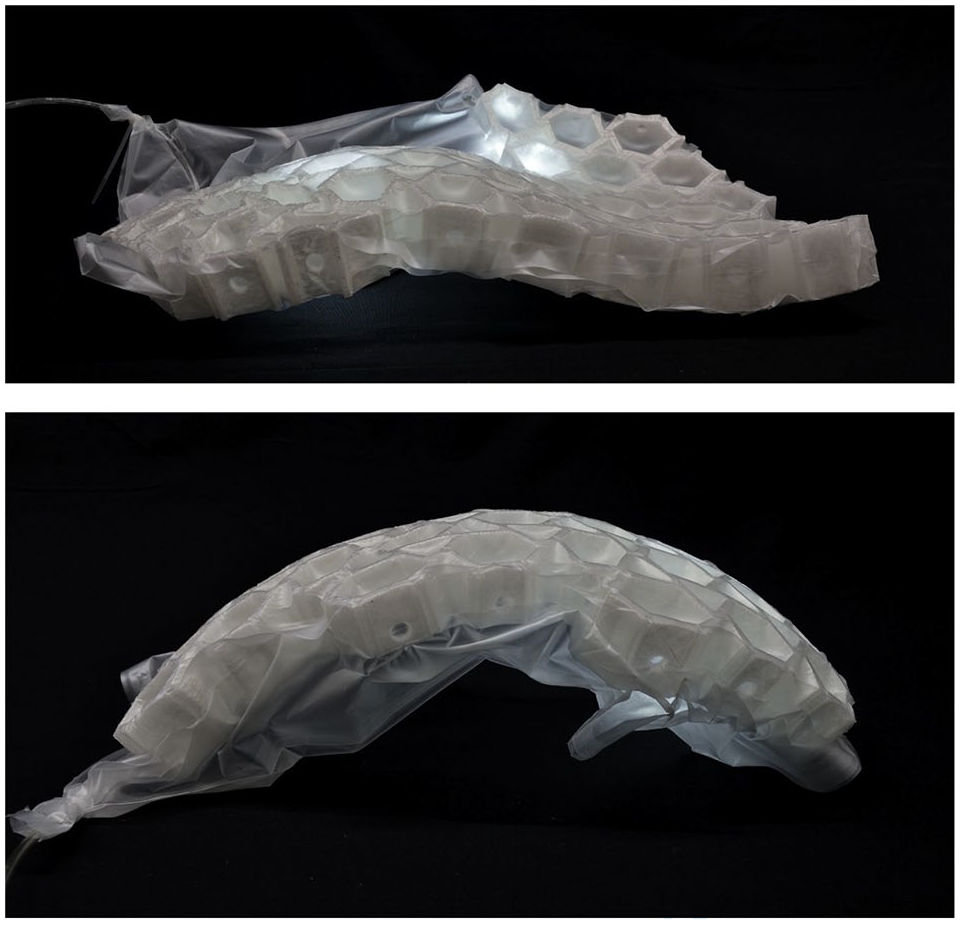
The fully assembled surface is then wrapped into a single airtight envelope, creating the environment, in which the vacuum—deforming and actuating the assembly—is created (Figure 7). Such an assembled mold of 1.5 × 0.5m has been tested in collaboration with BBFiberbeton, a Danish company specialized in adaptable molds and the production of Glass Fiber Reinforced concrete (GFRC) elements (Figure 8). While employing the soft-actuated composite as a flexible and programmed mold for concrete, we found that for this application, the material needed to underlie a much higher level of control and understanding of the behavior than in the previous case study. The casting of concrete requires highly robust and minimally elastic properties of the mold. The adaptation of the composite to these requirements is only granted if the negative air-pressure within the composite is constant and the interlocking modules themselves are stable enough to resist collapsing through added material weight or the vacuum.
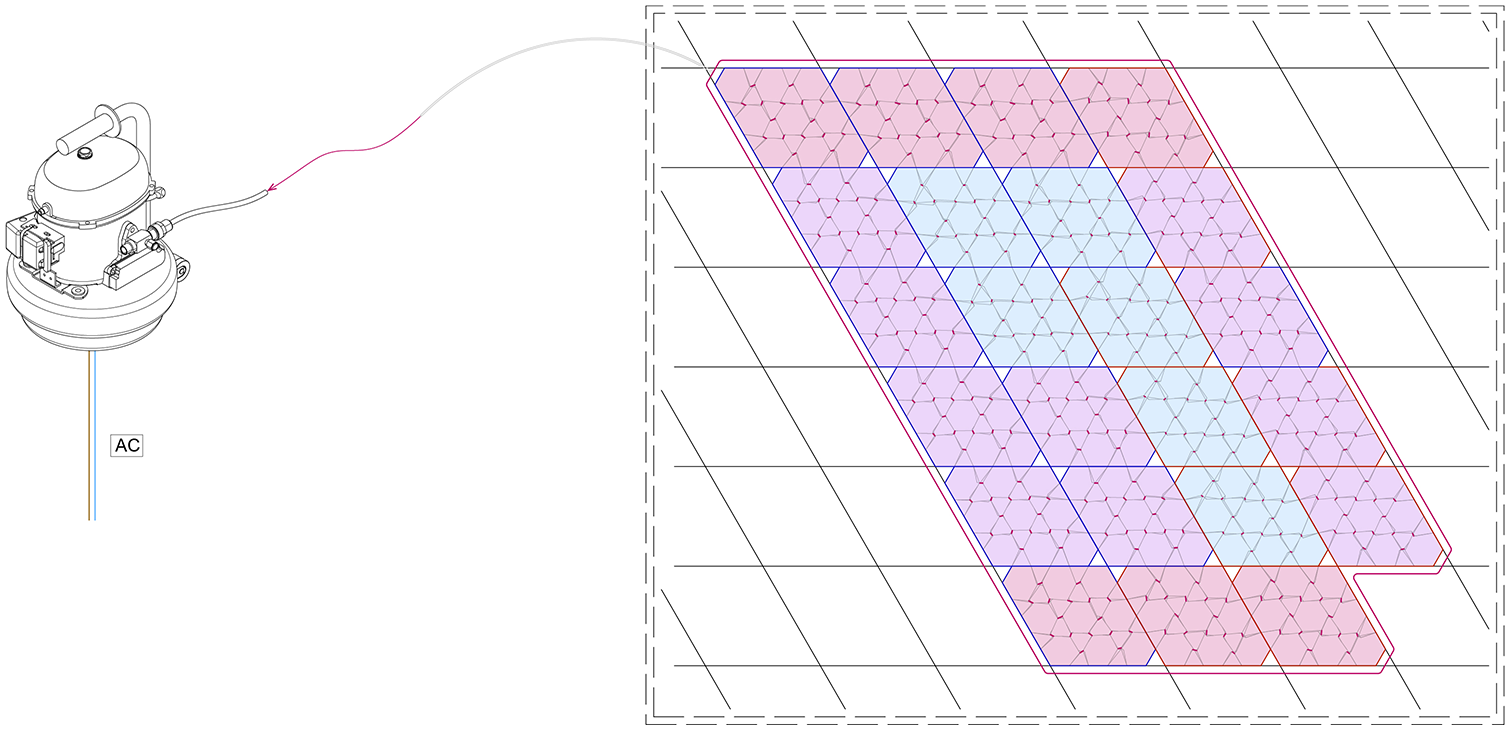
Actuation schema for adaptable molds.
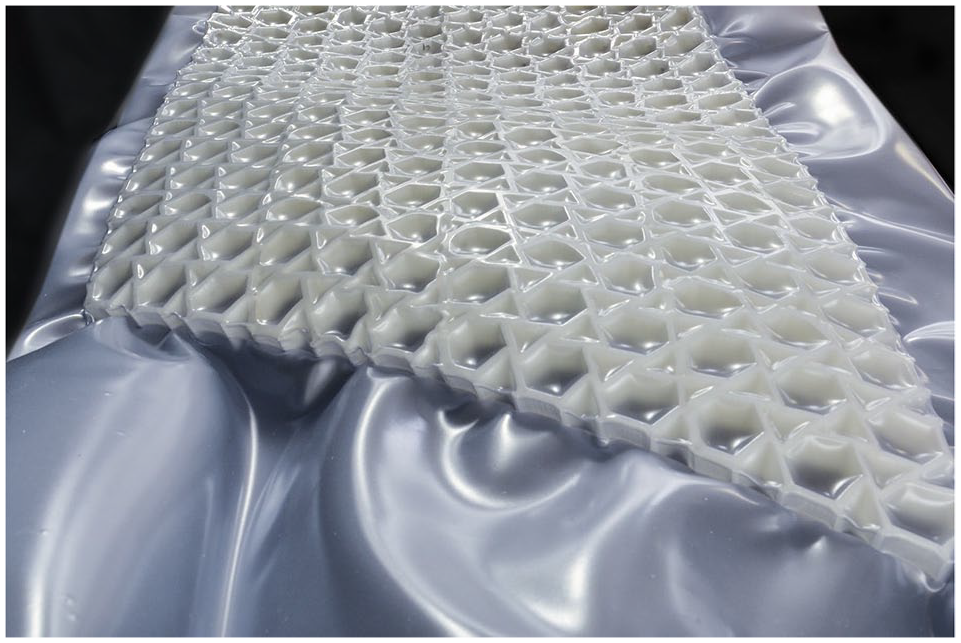
Soft-actuated material as mold.
Initial tests of the composite as mold for concrete have been very unsatisfying, as they could not provide the sought surface qualities expected in concrete construction. Instability caused by collapsing metamaterials, thin foils, and irregular internal pressure have led to cracks, delamination, and undesired folds on the concrete surface. Through the employment of different sheet materials as envelopes, varying in elastic properties and thicknesses, we have found that the sought material should be a compromise between elasticity and stiffness. While it needs to be soft and elastic enough, to prevent punctuation of the plastic foil caused by any sharp item during the production process of the concrete panels in the factory, but firm enough to minimize the deflection of the mold under the load of the concrete. The envelope used for the final mold has been made of a 0.5 mm soft PVC plastic sheet. While the thickness of the material prevents crumpling, the sheets, having thermoplastic qualities, can be welded through heat.
The second challenge addressed in this series of experiments was a constant problem of irregular actuation. Caused by small irregularities during the manual welding process of the composite’s envelope and ruptures of the envelope using the initially thinner materials, those problems could be solved by the connection of constant airflow. An adequate solution at this step of the research has been presented by a Venturi pump, turning compressed air into suction. This was connected to the mold through a Schrader valve. This method allowed a constant pressure level, completely interlocking the modules and hereby providing the same actuated shape without small temporary deformations. Therethrough the soft assembly has been adapted toward a robust mold for concrete, delivering doubly-curved, programmed geometries for concrete elements (Figure 9).
Concrete surface, casted using the composite material as mold.
Calibration of the design tool
A different associated challenge of this casting method is the precision of the prediction tool. In order to generate a coherent design-to-fabrication process, it is necessary to calibrate the previously described approximate simulation tool, which has until now been released from material properties. It has until now not implicated physical irregularities, such as slight changes in deposition of the printers during the fabrication process of the metamaterial, self-load of the mold, insufficient elasticity of the plastic envelope or tiny holes in it—preventing the creation of a vacuum. These factors can have a high impact on the actuation of the predicted mold and prevent it from fully actuating. Therefore this earlier simulation, as a tool to predict shapes, could not represent the physical properties of the generated surfaces in an accurate enough way. This level of precision was less important for preliminary experiments of soft and continuously changing architectural elements, however, a highly accurate dialogue between the digital and physical are necessary, if such a programmable material should be used to create stiffened architectural elements.
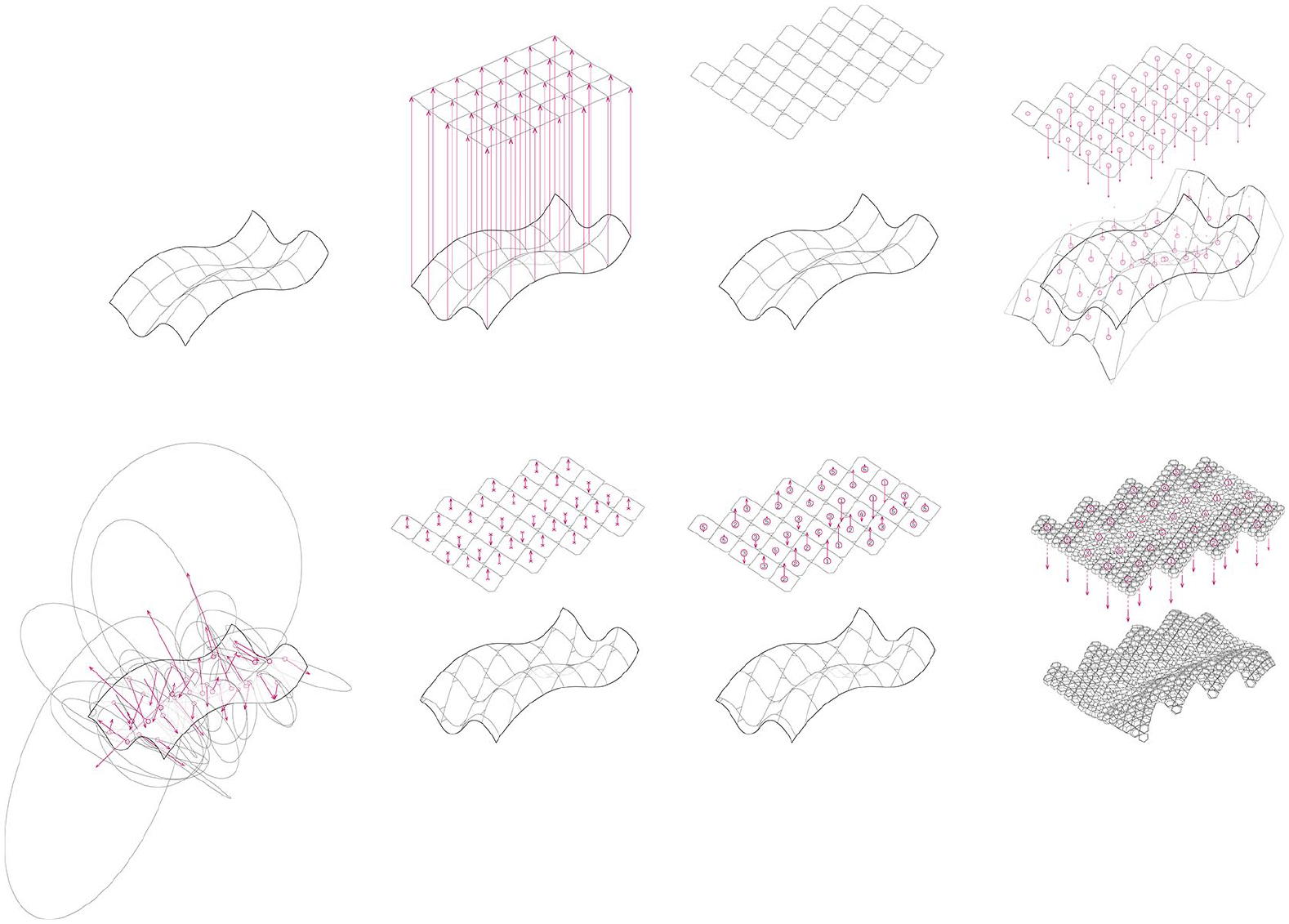
In order to calibrate the spring based simulation of geometries more exactly to the analyzed physical behavior, one of each kind of the individual modules were 3D scanned in their actuated state. For this a Faro laser scanner has been utilized. These are able to generate high definition point clouds as representations of the physical object—which can then be evaluated and compared to the simulated geometries of the modules. Through a search process; and feedback based on comparison of the simulated model and the scanned point cloud, the values for the springs have been applied to match physical bending performance. After this adjustment of the simulation of singular modules, the same process has been conducted, generating a better prediction tool for a larger assembly. This enabled the simulation to approximate the actual behavior with a tolerance of ±20 mm, generating a formfinding tool (Figure 10). This method of prediction can be used to digitally search the morphospace of the available set of modules.

Comparison of the scanned physical behavior and the simulated model.
Target-based simulation
In order to be able to define the parameters and constellation patterns describing a given surface, instead of being dependent on a searching process, a second simulation approach has been developed. A target based approach, allowing us to enter a desired geometry and through solving of the simulation, defining the pattern of the metamaterial modules that will best match that geometry, has been generated. This simulation first analyses and flattens a designed surface that has been entered as input information. As the deployed physical surfaces always initiate from flat—non actuated—elements within a regular and planar grid, the planarized surface area can be mapped onto the modular grid. This defines the tessellation pattern of the defined surface. Knowing the flat assembly pattern, this patch of modules can be mapped back onto the input surface, identifying their position on the spatial geometry. This in return allows us to evaluate the curvature of that part of the surface and choose its closest actuated geometry in the library of modules. The modules contained in this library differ from each other by surface curvature. The vector between an intersection point of the module and the center of the curvature-circle helps identifying the modules orientation, which is saved as binary information. This method allows the extraction of all the needed information for physical assembly: configuration, type, and orientation of the modules (Figure 11).
Target based simulation.
The full understanding of the developed material and the transfer of the physical properties to the computational representation has allowed us to use the tool to design and to predict different spatial formations and led to a third experiment, which was only conducted in a digital form. This last study was discussing different behaviors of clusters, depending on their way of assembly and actuation. It explored the possible spatial relations given through the merging of the assembly strategies developed in the first two case studies. Different scenarios have been developed, applying the design tool and exploring its capacities to generate varying room situations. These experiments differed from each other their amount of items joined as patches and the patches of modules joined in a system. Each patch of modules is connected to an individual source of actuation and therefore enabled levels of deformation not achievable through only individual or complete combined actuation (Figure 12 & 13).
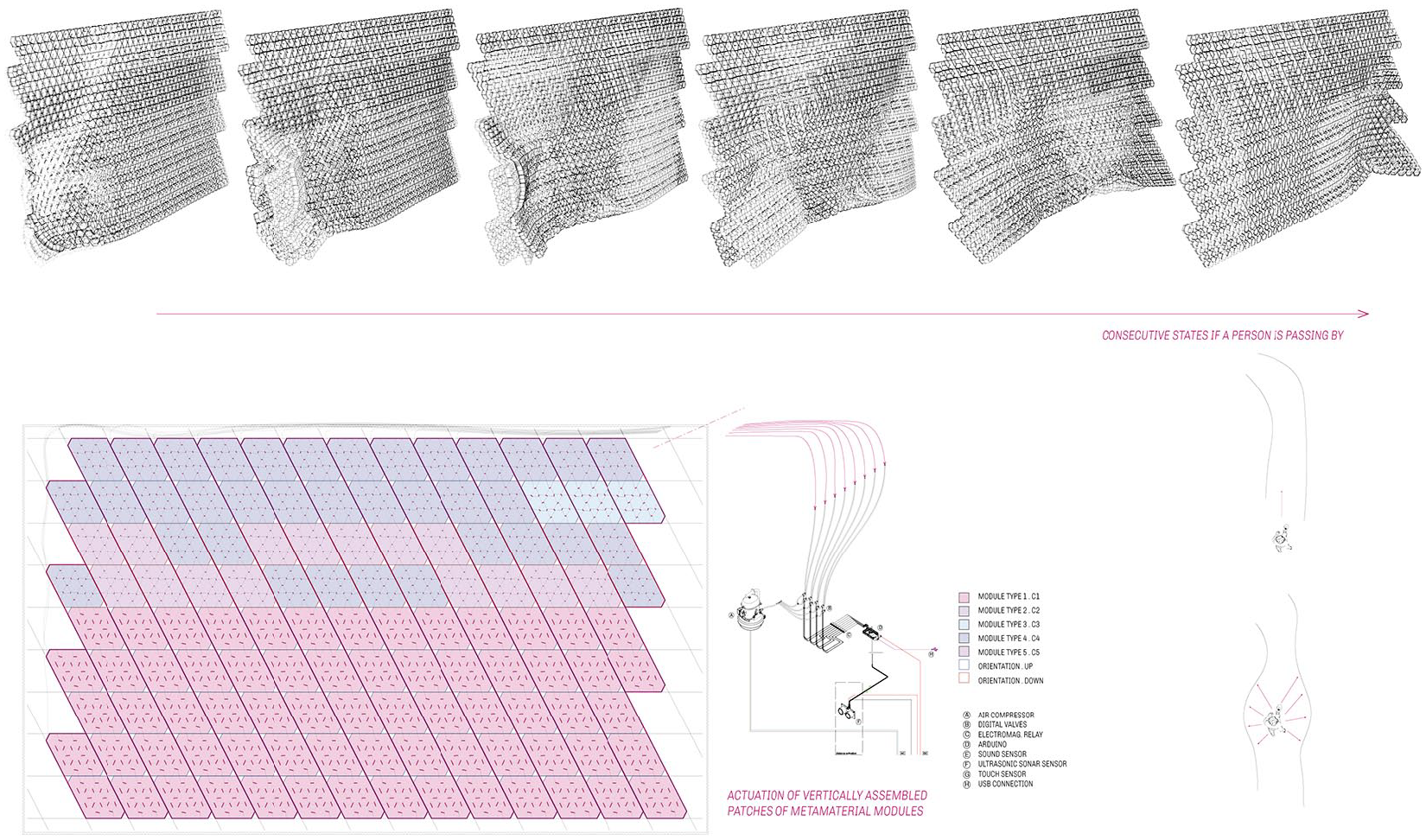
Distance-based actuation. Actuation schema for an assembly with larger modular patches.
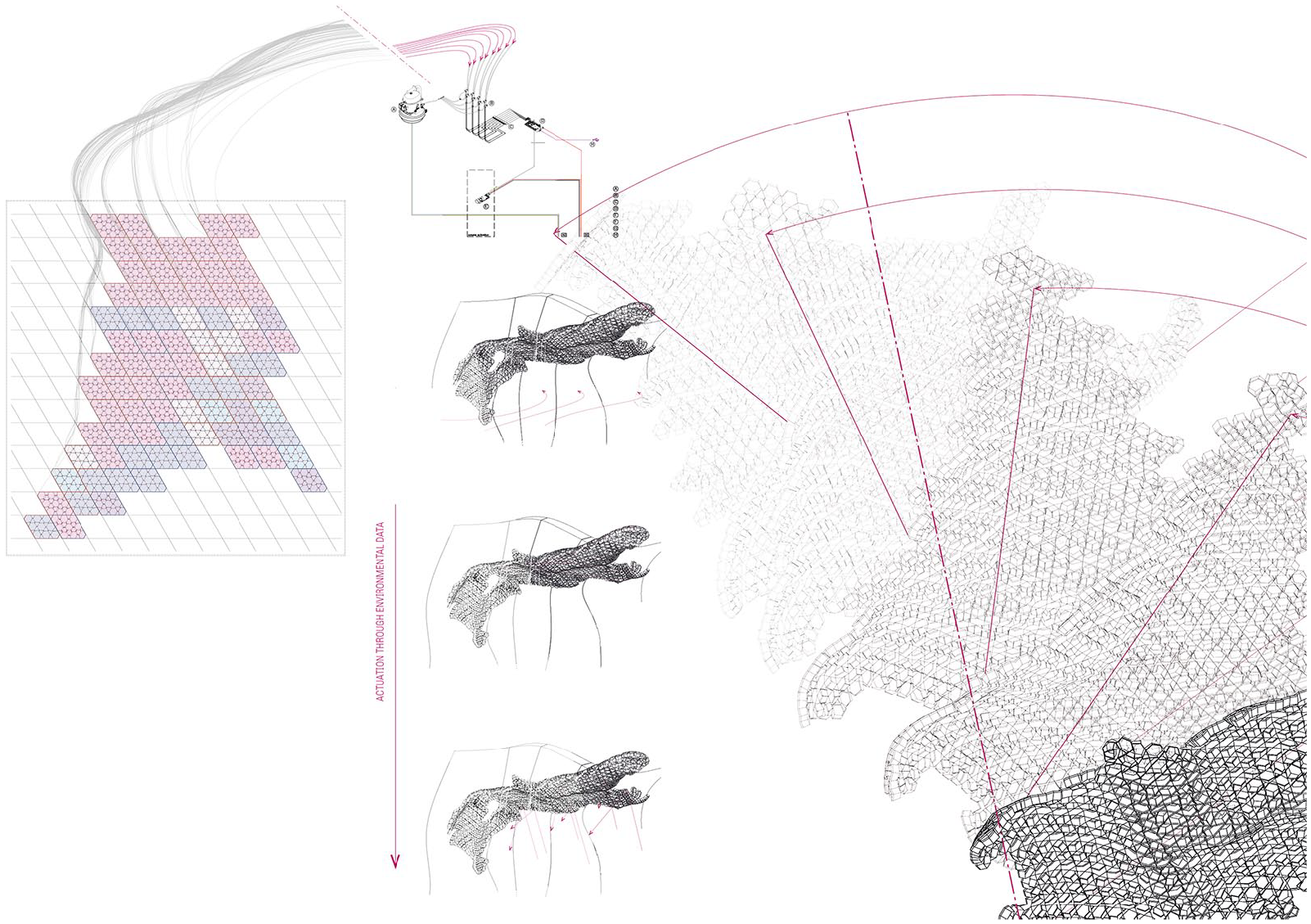
Actuation of varying geometries belonging to the morphospace of the given assembly.
Discussion
This research paper has unfolded the potential of programmable, soft materials within the field of architecture. Through a method of calibration of the material and thus the translation of information regarding the physical behavior into the digital representation offers the possibility to actively and precisely actuate geometry instead of sculpting shape into rigid material. Form actuation and some of its benefits have been demonstrated within this research through doubly curved surfaces, but it could be extended beyond this application through alternation of the geometrical features of the metamaterial and the therethrough induced behavior. The current warped and tapered hexagonal structure allows the homogeneous formation of a double curvature, where the radii do not need to be the same, but whose normals face in the same direction. The simple changing of “V-spacings” introduces different curvatures, this could be executed further through the connection and immediate collision of module walls, creating single curvature modules. Through the changing of geometry as seen in earlier studies of this project other deformations can be achieved, that is, linear and two dimensional flat changes. 30 The flipping of modules, making their actuatable side either facing downwards or upwards, allows the shrinking of surface size and thus the creation of non-developable geometries.
The change from fabrication methodologies with artificially controlled materials instead of rigid material shaping with disregard of its natural properties could lead construction industry away from, standardized and high-cost related building methods for bespoke geometries. The direct designing within the range of this materials’ morphospace opens a novel way of thinking about form designing. The design process of architecture generated with this system will be directed through the material behavior from the start until the end phase creating a more linear process between digital representation toward physical construction. The convergence of computational and material tools offer the potential of direct association from drawn shape to translation into physical actuation data.
Furthermore, programmable materials, which exhibit a certain behavior enable the active change of atmosphere of the space. Occupied architectural space can be actively tuned like an instrument. In this research mainly form-actuation and its associated light has been investigated and how the soft movement of architectural elements could affect the occupied space and its inhabitants. However, depending on the programmation and the associated demeanor of the soft element different senses could be addressed such as through smell, taste, tactility, temperature, sound, size of the space, and speed of movement.
The first case study has investigated the generation of soft spaces in architecture through continuous change of the composite. Here, the individual actuation of modules enables a rich design space to be achieved via deformation. However, it also leads to complications regarding assembly, requiring a method that links individual modules without interfering the airflow through holes in the envelope. In this small assembly of actuators a preliminarily solution is developed using velcro bands. This simple method offers the possibility of quick assembly and disassembly and therefore provides an ideal study model. In further studies, the method of connection between modules would need to be further developed in order to provide an architectural, robust system.
On the other hand, this soft composite has been developed into a robust and controlled, non-sacrificial formwork for concrete. The change of the assembly method from individual modules to homogeneous surface assemblies generating one large actuator, largely contributes to the composite’s ability to resist the mass of the concrete. The application of a soft material as formwork seemingly contradictory, can provide a flexible and reusable method which can be scaled up through simple increase of aggregation of modules. The molding system tested in this research was of approximately 1.5 × 0.5 m and could hold around 15 kg of concrete without deformation of the mold. While this final mold has not been tested against scanned point clouds as previous test iterations, the concrete outcome presented a very smooth and fully unbroken surface, due to a constant geometry of the mold during the hardening process of the concrete mass. However, the mold tested in this research was comparably small to generally produced concrete elements for architectural construction sites. It would be of value to compare the behavior of the mold if its own size increases as well as the load of the casted material.
Unlike other mechanically controlled formwork systems, this approach is not limited through a predefined frame and base. It can be extended in every direction, although the scaling of this research would need an associated scaling of the modules, their internal grading and the associated strength.
The target based simulation method allows to output information about the required assembly method and through the earlier calibration of the digital representation tool, the physical material properties are being considered. Although this approach offers the possibility to assemble previously designed surfaces, the discretization and adaptation to the available library of modules differentiates the final surface from the initial one.
Conclusion
This research has demonstrated the development of a programmable material and explored its controllability throughout different applications of flexible materials in architecture. The use of this soft-robotically inspired material as building material, allows not only for the creation of dynamic and responsive, living spaces, but also provides programmed and controlled precision of geometry, which can be designed and planned through computational means. The simple assembly of modules make it easily reconfigurable, scalable and changeable, while the deployment of a flat surface toward a spatial geometry allows easy transportation and storage of non-actuated modules. Additionally, especially in the case of the assembly used for the casting process of concrete, the modules can be easily exchanged and recycled to create new filament for forthcoming production. The application of this material could lead to the reduction of material consumption in the construction industry and contribute to agreeable spatial qualities as dynamic elements in the occupied space.
Future approaches could address and include prototyping of sensing devices to create feedback from the given environment to the material assembly and the design of responsive actuation of it. This research has focused on the use of similar modules, that all belong to the same geometrical family. Further investigations could be led in the variation of the geometries of the metamaterial and therefore change of the material behavior.
Footnotes
Acknowledgements
This project has benefited from the collaboration with the Danish company BBfiberbeton and their customized spray-cast material, a glass-fiber reinforced concrete, to produce and test the here described flexible mold. Furthermore, the authors would like to thank the educational team as well as the fellow students at CITAstudio for their critical reflections and their continuous support.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.