
Abstract
Advancements in multi-agent, autonomous, and intelligent robotic systems over the past decades point toward new design and fabrication possibilities. Exploring how humans and robots can create and construct collectively is essential in leveraging robotic technology in the building sector. However, only by making existing knowledge from relevant technological disciplines accessible to designers can we fully exploit current construction methods and further develop them to address the challenges in architecture. To do this, we present a review paper that bridges the gap between Collective Robotic Construction (CRC) and Human–Robot Interaction (HRI) and defines a new research domain in Collective Human–Robot Construction (CHRC) in the architectural design and fabrication context.
Keywords
Introduction
Developments in robotic fabrication have inspired new methods of architectural construction. 1 While most existing fabrication processes rely on the use of singular machines, recent developments in the field have focused increasingly on methods of multi-robotic fabrication and the advantages these bring to design and construction. 2 This shift from one to multiple machines requires not only rethinking the robotic process itself but also developing more dynamic and flexible methods for robotic control.
Processes involving multiple machines may be aimed at increasing a machine’s reach, speed, and efficiency. In addition to these goals, several projects investigate how multiple machines may support each other or take on individual tasks that lead to new construction processes and outcomes.3–6 As a result, machine interaction and control in multi-robotic processes have developed into a central area of contemporary research in robotic fabrication.
Even though crucial to the success of robotic fabrication processes, the role of humans in these processes has often not been the primary concern. Humans were viewed as users or designers pre-defining robotic tasks. However, even in the simplest robotic processes, humans are directly involved. They often perform as more than just the executors of tasks by monitoring the robotic process, making necessary adjustments, and improving the construction procedures on the fly. We can view robotic construction processes from two perspectives: (1) full automation aimed at replacing humans and (2) synergistic processes between humans and machines that expand available design and construction possibilities. While automation might lead to faster and more efficient construction processes, taking advantage of human agents in the fabrication process is a much more valuable and sustainable goal. Instead of reducing human workers’ presence on construction sites, it is worthwhile to explore how humans can be supported by machines and vice-versa. Therefore, the interaction between humans and robots, along with the control of multiple machines, becomes a crucial research area for the further development of robotic construction.
Human–machine interaction and machine–machine collaboration are not new research areas. Although they have only recently found their way into architecture and design, they are building upon a substantial body of knowledge from other disciplines such as robotics, mechanical engineering, and computer science. Architectural research has the potential to link multiple such disciplines through new approaches and applications. Therefore, it is essential for architects and designers to have access to the knowledge outside our field, in this case specifically that of robotics. By making existing methods and developments accessible to designers, we can identify new areas of research at the intersections of robotics-related disciplines and architecture, which would not be accessible by addressing each topic individually.
Method
We have identified the fields of Collective Robotic Construction (CRC) and Human–Robot Interaction (HRI) as central to our investigation since they cover researches from both robotic and human perspectives in the construction process. CRC focuses on multi-robotic systems collectively modifying a shared environment2,7 while HRI is dedicated to defining and crafting the relationship between humans and robotic systems.8–11 Our review aims to bridge these two areas and identify a new research domain in Collective Human–Robot Construction (CHRC).
This paper is structured as follows. Firstly, we give a critical survey of existing works in CRC and HRI. Then, we set up two principal research axes (ranging from autonomy to collaboration, from design to fabrication) to situate and connect major topics in CRC and HRI. Finally, we locate research gaps between CRC and HRI and highlight near-future opportunities in the newly defined field, CHRC. As a result, this paper is intended to be a review paper that goes beyond the depiction of existing research but critically highlights research gaps and resulting new opportunities.
Review
Collective Robotic Construction (CRC) concerns “embodied, autonomous, multirobot systems that modify a shared environment according to high-level user-specified goals,” as defined by Petersen et al.
2
in 2019. This is an emerging field (Figure 1) that integrates research on multi-agent systems, which explores the distributed operation of autonomous agents in a network, into construction robotics, which focuses on the automation of construction processes through the use of robots.
12
According to Petersen et al., CRC can be a critical tool to enhance the scalability and adaptability of robotic fabrication in the architectural field by integrating design, construction, mechanism, and control.
2
However, CRC examples, such as termite-inspired robot construction,
13
tensile web construction,
14
and micro-robot truss construction,
15
are mainly conducted in controlled lab environments at the moment, with humans often acting as operators for robots. Thus, there is research space to further explore alternative ways in which humans can interact with such swarm robotic systems to create new fabrication processes or make existing robotic construction methods more transferable to dynamic construction sites. The emerging field of CRC is at the interaction of many existing fields. Common research themes are highlighted in the corners. Illustration by Petersen et al.
2
in 2019.
Human–Robot Interaction (HRI) focuses on “understanding, designing, and evaluating robotic systems for use by or with humans,” as stated in Goodrich’s survey in 2008. 9 The literature on HRI has expanded rapidly over the past 15 years. 16 It consists of broad and diverse topics, which can be loosely organized into five major categories: navigation, perception, management, manipulation, and social. 10 The rich literature in HRI covers frameworks and methods for creating collaborative, interactive, and efficient working relationships between humans and machines.
As both CRC and HRI are young research domains that have become exponentially active within the past two decades, we expect to find previously un-discovered bridges between the two literature spaces. Besides, because humans and construction processes are inseparable in the building industry (both in terms of design and execution), exploring the topic between CRC and HRI can help better leverage robotic technologies in the overall building sector.
In the following subsections, we blend the notion of collectiveness into HRI and human factors into CRC. Collective agents open up new ways of collaborating and decision-making in design procedures (e.g., less centralized control, stigmergic mechanisms, or feedback-based processes) and material manipulation. Meanwhile, better integration of human operators into the robotic construction process accelerates technology transfer of robotics into real-world practice, expands fabrication methods by combining both parties’ strengths, and ties digital fabrication back to human scale and values. In addition, some shared inspirations drawn from biology and game theory for CRC and HRI are also discussed in this section. The intentional cross-referencing interweaves literature reviews between the two domains and aims to reveal potential gaps and opportunities.
Collectiveness
The term collectiveness implies a networked system linking individual agents into a whole. A collective or multi-agent system contains more than one agent to form a higher-level entity through interactions among the agents. Ferber defined the terms “agent” and “multi-agent system” as follows in 1999: “An agent can be a physical or virtual entity that can act, perceive its environment (in a partial way) and communicate with others, is autonomous and has skills to achieve its goals and tendencies. It is in a multi-agent system (MAS) that contains an environment, objects and agents (the agents being the only ones to act), relations between all the entities, a set of operations that can be performed by the entities and the changes of the universe in time and due to these actions.”
17
One major advantage of a collective system is that it can form large-scale complex entities without requiring each agent to perform complicated computations or actions. When it comes to physical power, a group of swarm robots can manipulate material elements that are much larger in scale than any individual robot can individually manage. Examples of such can be seen in emergent structures 18 and distributed timber constructions. 19 Computational-wise, collective intelligence can achieve significant complexity without requiring heavy information processing from each agent. Wisdom of the crowd is generated through a diverse and decentralized collective that supports individual independence and provides appropriate aggregation mechanisms. 20 Another implication of collectiveness particularly in architectural design is group creativity, which involves multiple agents coming up with new ideas and creations, often in an improvisational manner. Group creativity, or improvisational creativity, differs from the traditional product or compositional creativity due to its non-linear workflow and equal emphasis on process and final result.21–23 Existing examples demonstrating the possibility of heterogeneous human–robot teams improvising together can be seen in music and theatrical performances (e.g., multi-robot–human jazz jam session24,25 and theater improvisation 26 ). However, more experimental projects in human–robot improvisational construction are needed to assess the potential of robotics technology’s influence on group creativity in architectural design and fabrication.
Research interests in collective or multi-agent systems emerged way earlier than the prevalence of robotics, dating back to the 18th century.27–29 Thus, many notions in the collective systems are not robot-specific (e.g., the Object Management Group, 30 Foundation for Intelligent Physical Agents, 31 Knowledge-able Agent-oriented System, 32 and General Magic’s Models33,34). However, researchers should still be aware of such this area of research and active transfer general principles into heterogeneous human–robot teams in design–fabrication context.
The construction industry consists of highly collective human social structures, including but not limited to roles such as architects, engineers, construction workers, electricians, landscape designers, and interior designers. Because relationships amongst these professions can be influenced by technological, social, and economic factors, introducing a new tool such as the robot can often inflict relationship changes within construction-related occupations. For example, the recent prevalence of Building Information Modeling (BIM 35 ) has improved the workflow across design, engineering, construction, and maintenance. Similarly, the notions such as Robot-Oriented Design36,37 were introduced to adjust the value chain “corresponding with information flows between enterprise, product, machinery, robots, costumers and all complementary sub-processes. 38 ” This helps the industry to better address social, environmental, and financial dimensions.
Human factors
Robotics and automation were initially invented to assist humans in completing tasks; hence, the human factor is an important subject to consider in order to create corresponding robotic systems and human–machine relationships.
The human factor, in relation to robots, can be interpreted in many ways. For example, humans can be trained (e.g., operators) or untrained (e.g., consumers and passerby), supportive or disruptive, individual or collective. Regardless of the specific types, humans generally make mistakes, perform less consistently, and are biased. 40 Thus, researchers can always draw references from psychology and sociology in building a fundamental understanding of human behaviors before designing a befitting robotic system. For the purpose of this review, we limit the role of humans to trained users involved in a construction project, such as designers, engineers, and construction workers.
HRI covers topics regarding how humans interact with robots. The three major components of HRI are defined as: Robot, Human, and System.
10
In 2004, Yanco updated a list of taxonomy for HRI.
41
Key aspects concerning human factors include: 1. Ratio of People to Robots: the ratio of people to robots directly affecting HRI in a system.
41
2. Level of Shared Interaction Among Teams: the collaborative versus independent controls between human and robot agents.
41
3. Interaction Roles: for example, the five roles that humans can take in an interaction with robots, as defined by Scholtz: supervisor, operator, teammate, mechanic/programmer, and bystander.
42
4. Type of Human–Robot Physical Proximity: the level of physical proximity between humans and robots. Huttenrauch and Eklundh proposed five modes: avoiding, passing, following, approaching, and touching.
43
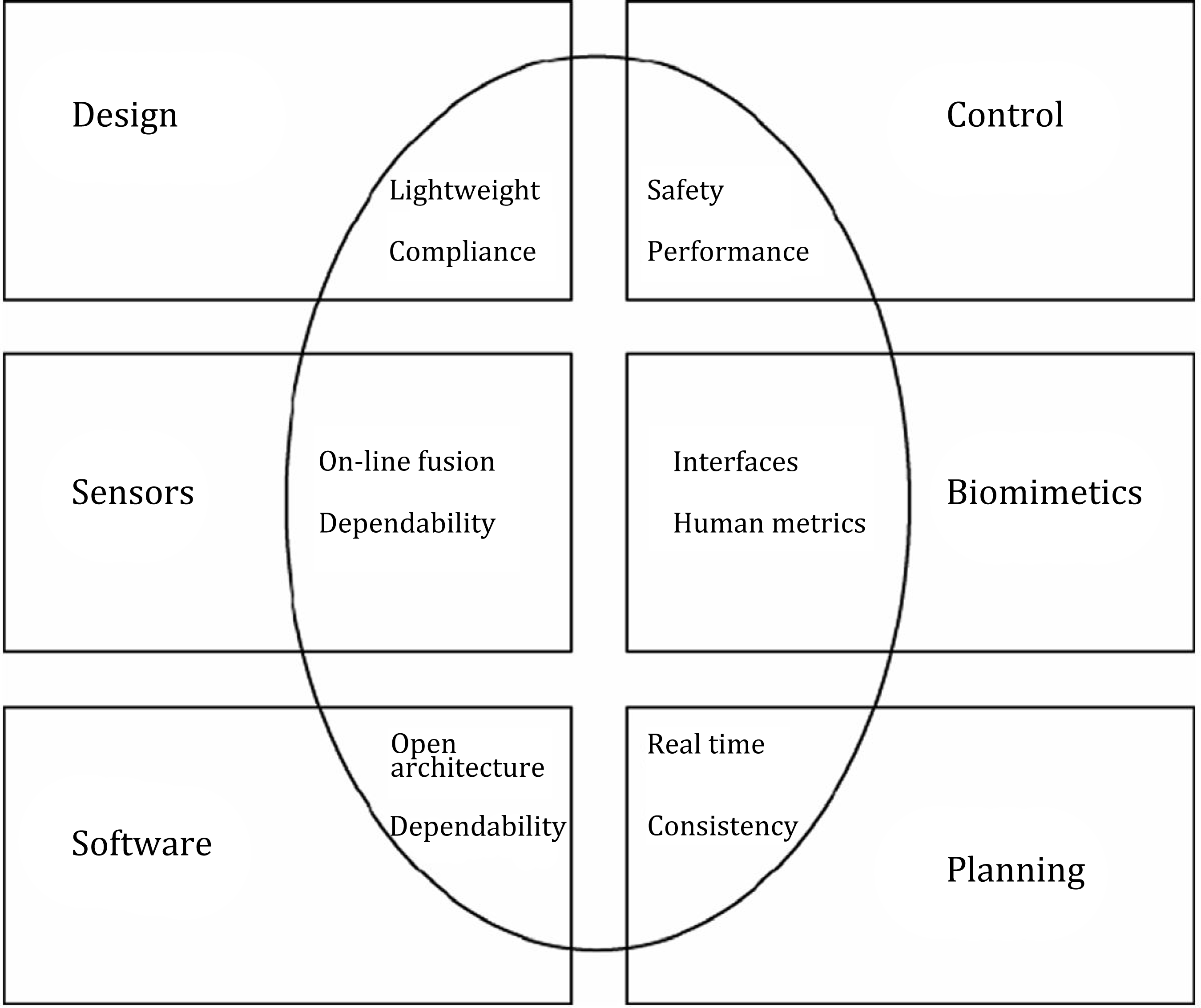
In addition, the emerging subdomain under HRI named physical Human–Robot Interaction (pHRI) focuses on the physical side of the brain–body duality in robotic systems with the presence of the human. Research topics concerning pHRI are shown in Figure 2 by De Santis et al. 5. Decision Support for Operators: the interface between human and robot—specifically how information is conveyed to form decisions, e.g., how sensors are integrated. A “map” of robotics for anthropic domains: main issues and superposition for pHRI, illustrated by De Santis et al.
39
in 2008.
With the cyborg as a metaphor, human abilities have also been enhanced and extended by computational and robotic tools. People can now sense and visualize information that was previously out of human’s inherent capability with the aid of external instruments, such as smart devices (e.g., smart phone 44 and smartwatch 45 ), skin-based interface,46,47 and wearable (e.g., head-mounted displays,48,49 backpack and portable hand-held devices 50 ). In addition, hybrid or mixed reality starts to merge physical and digital environments into one, allowing humans to have more meaningful interactions and controls over computational and robotic tools. 44
Inspirations: Biology and game theory
Bioinspirations
Multi-agent robotics often draw inspirations from nature, such as self-assembly (e.g., crystals of bacterial flagella, 51 multi-cellular organism development,52,53 and species of ants, bees, and wasps 54 ). The collective behaviors in groups emerge from local interactions, with the overall pattern tuned by positive and negative feedback loops. The recent implementation of opinion vectors also allows for a smooth switch between consensus and dissensus among uniformed swarm group, 55 enabling more nuanced control over multi-robotic systems.
Through a control matrix, swarm algorithms allow multi-agent robots to be responsive and flexible, which are desirable qualities in forming safe and robust interactions between robots and humans. Goodrich et al. 56 explored the leader (attract) and predator (repel) styles of human influences through a bio-inspired robot team. According to Goodrich, ”leaders are more effective in influencing coherent flocks, but predators can be used to divide the flock into sub-flocks, yielding higher performance on some problems. 57 ” Their research combines HRI with Bio-Inspired Robot Teams (BIRT) into HuBIRT (human interaction with bio-inspired robot teams), providing a new way of considering humans’ relationship with swarm robots. Furthermore, the biological concepts have inspired new roles in robotic teams such as mediators 58 to facilitate a more integrative control system that can fulfill a wider range of spatio-temporal tasks. 59 Besides the branch of bio-inspired robotic models focusing on mediator’s roles, another branch discusses the different algorithms for swarm communication models (e.g., metric, topological, and visual) and emphasizes the importance of the deliberate selection of such models to enhance the task performance of a swarm system. 60
The bioinspirations for swarm robotics introduce structures and hierarchies into the management and coordination systems. Instead of the traditional controller-agent 61 or peer relationship 62 with robots, the biological examples mentioned above suggest roles in-between. As mediators, humans can coordinate a large group of swarm robots with a more flexible and fine-tuned control. However, most researches in this area remain in the theoretical or simulated stage, with few examples in real-life robotic applications. It is a great opportunity and challenge to bring these bio-inspired multi-robotic models into design and fabrication applications.
Economics and game theory
Economics, especially game theory, has also inspired control methods for collective robotic systems with concepts of negotiation and decision-making. Studies inspired by game theories, in general, focus on the cooperation of selfish rational agents 7 in achieving utility-maximizing scenarios with respect to other agents’ decisions. In multi-robotic task allocation, one can construct a price-based task market, and each robot is programmed to act selfishly and buy 63 or auction64,65 tasks for maximum profit. 66
Game theory is broadly applicable to various robotic problem types 67 and can yield efficient and responsive computational frameworks. 68 In 1993, LaValle and Hutchinson brought game theory into multi-robotic scenarios by conceptually applying game theory to topics such as “multiple robot coordination, high-level strategy planning, and information gathering.” 67 In 2008, Meng 68 demonstrated a dynamic-programming function, where a nonzero-sum game is formed so that optimal overall robotic performance can be accomplished. This game-theory-based framework is designed to be efficient and robust in a dynamic environment with real-time responsiveness.
Game theory has influenced not only multi-agents robotics but also human–robot interaction. In 2008, Lee and Hwang 69 proposed a gametheoretic approach to communicative interaction and cooperative decision-making. In 2016, Hadfield-Menell et al. 70 proposed cooperative inverse reinforcement learning (CIRL) that effectively achieves value alignment in a partial-information human–robot game. Game theory can also be used to better understand HRI. For example, in 2016, Wu and Paeng used the game theory approach to show that“a human may grow to trust a robot teammate more than a human teammate.”71,72 Besides, studies in heterogeneous teams also draw inspirations from game theory. In 2010, Tarasenko 74 applied Lefebvre’s Reflexive Game Theory (RGT) 73 to model mixed groups of humans and robots, where both parties are represented with a unified hierarchy and methods of solution are considered simultaneously with practical applications.
Both the biological and economic concepts provide new inspirations for integrating humans into a heterogeneous robotic team with a less centralized and more flexible control system. This flexibility in coordination can help humans better predict the robots’ next moves, split tasks with robots in a more organic manner, and influence task executions on the fly. However, researches in the theses areas are currently conducted mainly in simulated or lab environments. It remains a challenge to transfer these methods into real-world applications, especially in the construction industry, efficiently and robustly. 75
Research Problems across CRC and HRI
Goodrich and Schultz defined HRI problems to be “to understand and shape the interactions between one or more humans and one or more robots” that can be broken down into the following constituent parts (44): 1. Level and behavior of autonomy 2. Nature of information exchange 3. Structure of the team 4. Adaptation, learning, and training of people and the robot 5. Shape of the task.
Meanwhile, as defined by Petersen et al., 2 CRC consists of four major areas: Robotic Systems, Assembly Algorithms, Building Design, and Functional Material (Figure 1). Overall, the research scope of CRC and HRI is not just limited to technical challenges such as robotic systems and material manipulation methods but extends to areas of social dynamics and team management, such as in swarm behavior, task assignment, human–robot collaboration, and more. Although both CRC and HRI are already interdisciplinary fields, a meaningful bridge can be made between the two by carefully laying out related research problems onto research axes relevant to the robotic and architectural scope.
Research axes
In this paper, we propose two research axes (autonomy–collaboration and design–fabrication, see Figure 3) to situate the ranges of topics encountered in CRC and HRI, as well as industry-specific topics regarding human collectives in building sector. The autonomy–collaboration axis covers technical aspects in robotics such as sensing, controlling, and communicating. The design–fabrication axis helps situate the multi-agent robotic researches into the field of architecture. Together, these two axes aim to map out research domains and gaps in collective human–robot construction. In Figure 3, a gradient diagram qualitatively illustrates how sub-branches of CRC, HRI, and architectural design fabrication topics mentioned in the reference list of this review paper fit into the research scope spanning across autonomy–collaboration and design–fabrication axes. The main diagram in Figure 3 is formed by merging two human and robotic collective construction diagrams into one. As a result, the horizontal Autonomy–Collaboration–Autonomy axis in the key diagram is mirrored around Collaboration with the left and right ends illustrating each of the robotic and human collectives. Bridging the collectives: collective human–robot construction.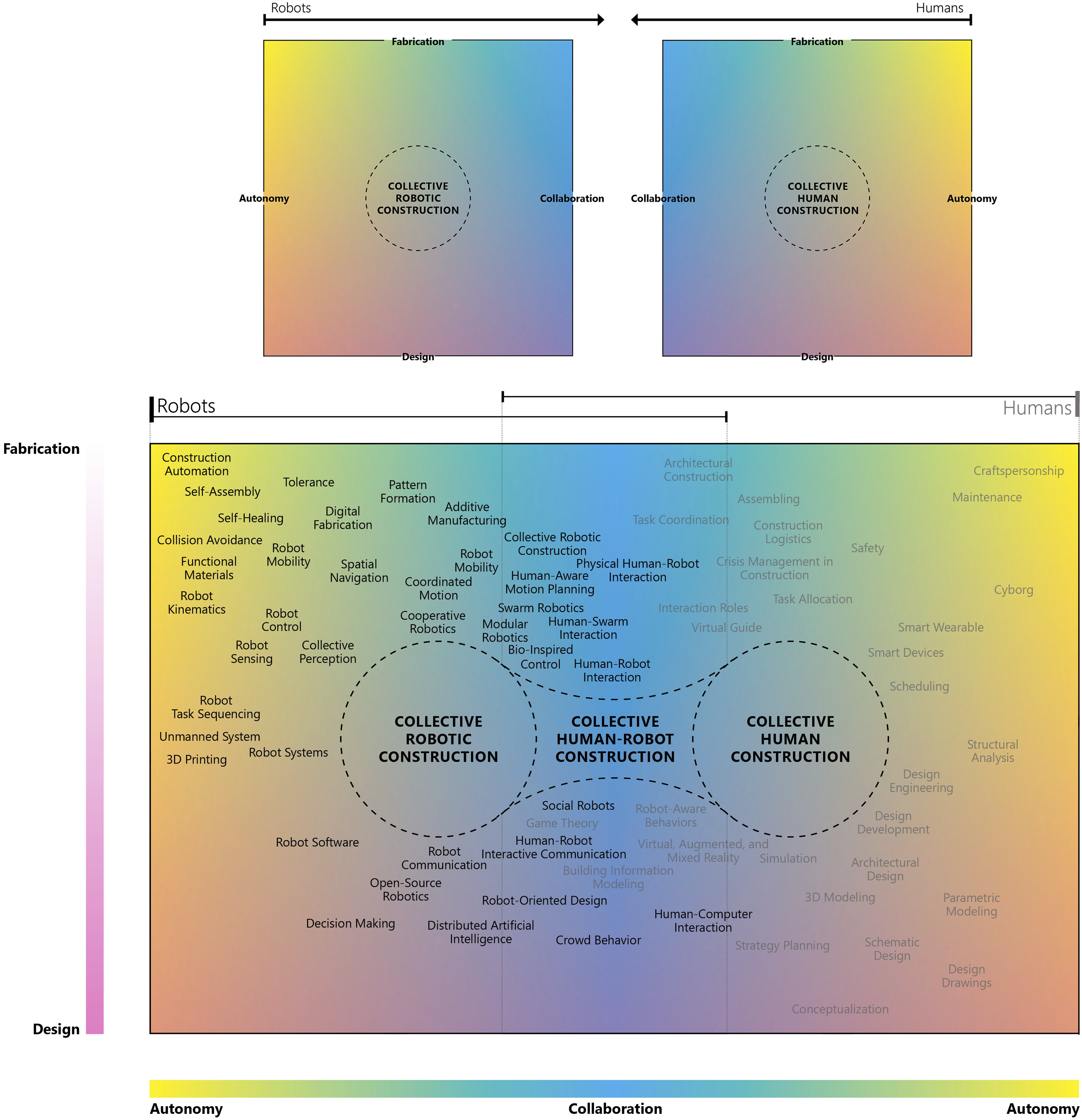
Autonomy–collaboration
Autonomy
Autonomy is a research topic that is critical to both CRC and HRI. Beer et al. have provided a loose definition for autonomy in humans or machines as “the extent to which a system can carry out its own processes and operations without external control.” 76 They also provided a more specific definition of robotic autonomy to be “the extent to which a robot can sense the environment, plan based on that environment, and act upon that environment, with the intent of reaching some goal (either given to or created by the robot) without external control.” 76
There are two major groups of opinions on autonomy’s implications in the HRI context. Huang et al. suggests that higher autonomy yields less interaction between humans and robots.77–80 Their research on unmanned system (UMS) aims to maximize system performance with minimal human intervention. Goodrich and Olsen echo the point by associating the idea of neglect with autonomy. They argue that the length of a time period in which a person can neglect the robot is directly associated with how effective the robot performs its tasks independently.81,82 Therefore, less interaction is required if the robot has higher level of autonomy. 41
A contrasting perspective suggests that increasing the level of autonomy requires more complex types of collaboration among agents.9,11,83,84 In other words, there’s a positive correlation between autonomy and collaboration. With higher levels of autonomy in robots, a more balanced partnership can be established, where humans and robots work together toward a common goal with proper communication and complementing skill sets.8,84 For example, Fong suggested a model where robots can ask a human for advice and take advantage of human perception and cognition especially when facing arbitrary situations.8,85
While robotic system can range from fully autonomous to teleoperated, adjustable autonomy has introduced the notion of switching between a range of autonomy modes or levels. 86 Adjustable autonomy opens up a design space which allows for fine-tuning the level of HRI to achieve desired performances. For example, adjustable autonomy allows for strategic direction of human attention, which can helpful when human focus is requires in design decision on-site or emergency response in hazardous conditions.
Different modes of autonomy have been proposed by existing robotic control frameworks. For example, Bruemmer et al. from the Idaho National Engineering and Environmental Laboratory (INEEL) proposed a robot control architecture that consists of four primary autonomy modes: teleoperation (human has full and continuous control of the robot at a low level), safe mode (human directs the robot’s movement; robot takes initiatives to protect itself), shared control (The robot takes the initiative to choose its own paths for local objectives), and full autonomous (robot performs global planning and only requires high-level tasking input from humans). 87 Bruemmer and Walton 88 also created a dynamic umbrella of adjustable autonomy control that can “support a spectrum of team interactions as individual capabilities change and needs arise.”
Collaboration
Collaboration requires agents to have a certain level of autonomy but focuses on the coordination between multiple agents. Wang identifies five team-performance measures: trust, compliance, transparency, mission success, and correct decisions, with trust being a foundation in human–robot teams.89,90 Researchers have shown that a better understanding of a robot’s decision-making mechanisms can help enhance trust for human operators. 91 In Hoffman’s latest fluency metric scale, he provided a list of subjective items to consider when evaluating Human–Robot Collaboration.92,93 By analyzing through aspects like trust in the robot, human–robot fluency, positive teammate traits, and more, human–robot collaboration is studied through a more subjective and experience-based perspective.
Collaborations among humans are increasingly influenced by advancements in machines. Human–Computer Interaction (HCI) provides new interfaces for directed, collaborative, and passive crowd-sourcing in the context of collective intelligence. 94 Besides, the prevalence of cloud computing has inspired the concept of Human–Robot Cloud. HRC enables distributed computation, storage, sending, and actuator networks. 95 Meanwhile, researches related to physical collaboration among collectives are also essential. The study of Physical Human–Robot Interaction (pHRI) concerns HRI in close physical proximity. It explores human-friendly robot design (e.g., lightweight machines with flexible force control 96 ) and human-aware motion planning (e.g., with velocity constraints, 97 sampling-based costmap planners, 98 and dynamical systems 99 ). Aside from challenges regarding HRI in close proximity, another research lens focuses on embodying interactions in space. As stated by Eng et al., an interactive space consists of “data from human activity, human opinions, and the activity of the space.” 100 In these settings, changes in human groups influence the distributed manipulators to form an interactive environment that exhibits collective agency across human and machine. Examples of interactive spaces include the Flexing Room 101 and Ada. 102
How humans and robots communicate with each other is important for collaboration. In 2015, Mavridis
103
gave a thorough review on the topic of verbal and non-verbal human–robot interactive communication. Mavridis used a list of 10 desiderata to guide his review: 1. Breaking the “simple commands only”
104
barrier. 2. Multiple speech acts.
105
3. Mixed initiative dialogue (e.g., the Karlsruhe Humanoid
106
and the Biron and Barthoc systems at Bielefeld
107
). 4. Situated language and the symbol grounding problem (e.g., ELIZA,
108
the Loebner Prize,
109
and the POETICON project
110
). 5. Affective interaction (e.g., the Kismet robot
111
and the ATR Robovie robot
112
). 6. Motor correlates and Non-Verbal Communication (e.g., eye gaze cues113,114 and gestures
115
). 7. Purposeful speech and planning (which concerns navigation through uncertainties). 8. Multi-level learning (e.g., Machine Learning
116
and crowd-sourcing in HR
117
). 9. Utilization of online resources and services (e.g., the Roboearth project
118
and its Rapyuta cloud engine
119
). 10. Miscellaneous abilities (that can deal with multiple conversational partners
120
with multilingual capabilities
121
).
Mavridis’ review suggests a trend toward more fluid communication, encompassing numerous formats and the dynamic integration among them. In robotic fabrication, enhanced communication among humans, robots, built structures, and the larger environment enables feedback loops that help to balance the fabrication and design concerns. 122 Not only can we develop new ways of strengthening connectivity across the builder, tool, and environment, but we can also rethink built space as a medium, where the building becomes a living organism that can shift and adjust based on the inhabitants’ inputs. For example, in robotic research, Nagpal has promoted the idea of communicating through built structures via collective agents. 13 In architectural theory, Kilian 101 proposed the flexing room where the human–machine interface is represented by the space itself.
Design–fabrication
The design–fabrication axis aims to tie the research domain to the building sector. The design end of this axis is related to the virtual aspects, including topics in decision-making, information representation and exchange, communication, and more. Meanwhile, fabrication concerns the physical processes, including but not limited to material manipulation, localization, navigation, tolerances, collision avoidance, robotic kinematics, and human–robot physical interactions.
Topics in design draw references from fields such as Human–Computer Interaction 123 and how CAD and BIM influenced the building industry, but with additional consideration in collective robotics as the driving factor. Bock first proposed the term Robot-Oriented Design (ROD) in 1988 36 and published a same-titled book in 2015. 37 According to Bock, ROD is concerned with “the co-adaptation of construction products and automated or robotic technology, so that the use of such technology becomes applicable, simpler, more robust, or more productive or efficient.” An example such as ROD lies in the middle of the design–fabrication axis. Besides, emerging research starts to explore how design tasks can be split and distributed to robotic collectives, where individual robots make decisions based on inputs from the other robots and the environment. For example, Yablonina’s co-design strategy with larger groups of smaller robots showcases a codependent development of the process, object, and machine. 124
Discussion
Collective human–robot construction
After reviewing CRC and HRI, we identify a potential research domain situated in between the two and define it as follows:
Collective Human–Robot Construction (CHRC) concerns multi-agent construction involving both human and robotic collectives. It is an emerging interdisciplinary field that combines collective fabrication, human–robot interaction, and heterogeneous teams. Research focused on CHRC spans from autonomy to collaboration, indicating novel ways of designing and fabricating.
Motivations for Defining CHRC Research Space
CHRC is a unique field compared to its neighboring ones. It differs 1. from CRC with a focus on human factors, 2. from HRI due to the emphasis on collectiveness, and 3. from human–robot teams through its application in construction.
The purpose of this review is to draw attention to the specific overlapping research topics concerning collectiveness, human–robot teams, and construction, and provide the terminology of CHRC to refer to this particular area.
CHRC is critical in joining forces and intelligence of robotic and human collectives to achieve greater impact in the field of construction (ranging from team dynamics 125 to economic profits 126 ). The distributed timber construction with collective robots acting as joints 19 is one recent example among others (e.g., tensile web construction 14 and micro-robot truss construction 15 ) that shows the potential of CRC in creating complex spatial structures. Both the emergence of dynamic autonomous control and diverse collaboration models have opened up possibilities for new ways of designing. For example, Yablonina’s mobile robotic fabrication system for filament structures takes a step further from ROD to imply a co-design scenario between human and distributed robotic agents. 124 From a broader industrial point of view, distributed collective systems have the advantage of responsiveness and robustness.55,127,128 Combining human sensitivity and creativity with robotic strength and accuracy can help solve existing problems concerning tolerance and scalability 129 to accelerate the transferring of novel fabrication methods from lab to real-world construction sites. Therefore, in the long run, CHRC has the potential to help expand the adoption of robotic technology especially for on-site construction challenges.130,131
In a nutshell, CHRC is a promising field for exploring: 1. New formal expressions 2. New ways of designing and fabricating 3. Expanding the scale of robotic application in construction sector 4. Increasing efficiency in communication, computation, task allocation, and material usage.
Future challenges and opportunities in CHRC
The emerging CHRC field is filled with challenges and opportunities. Moving forward, we need to not only tackle technical problems (e.g., multi-agent decision-making, control, communication, and learning) but also design integrative systems to efficiently bring the two collectives together (humans and robots) in pursuing design and construction tasks in real-world practice. While there is rich literature in conceptualizing collective systems and human factors, further work is needed to synthesize the two themes into construction applications.
Figure 3 provides a visual indication of potential research gaps to fill in CHRC. The clustering of robot-related topics toward the fabrication end of the axis indicates a potential utilization of robots in assisting design processes. The blue column at the center gathers topics directly related to human and robot collaboration. Thus, there is rich potential in bridging and blending such topics. For example, social robots can be paired with robot-aware behaviors to create design fabrication scenarios where robots and humans are both orientating their decisions and behaviors based on the other’s characteristics. Another example is to connect Bio-Inspired Control and Interaction Roles in swarm robotic teams (Figure 3). The topic has already been slightly touched upon in Goodrich’s HuBIRT research, 56 although it was not oriented toward architectural fabrication. Similarly, due to the mirrored layout along the Autonomy–Collaboration–Autonomy axis in Figure 3, one can also fold the diagram vertically in half and find potential research bridges across the “robots” and “humans” areas on symmetric locations in the diagram. Such examples include the symmetry between robot’s self-healing and human-operated architectural maintenance, between robots’ collective perception and human’s extended connectivity through smart devices, or between robot sensing and smart wearable. It is also worth mentioning that the research topics that are qualitatively located on Figure 3 are dynamically shifting with on-going development of the subjects. Therefore, there can be motivations to actively push one topic toward a certain research direction. For example, 3D Printing is currently located toward the robot’s Autonomy end of the axis. However, this does not mean that 3D Printing would not benefit from more feedback and input from sensors and human operators.
To accelerate the bridging across the disciplines, iterative prototypes of collective construction systems can be developed to further expand humans’ roles in existing CRC systems or collective behaviors in HRI. For example, Petersen et al. identified the human element in CRC by stating that “Future research will also reveal where humans are best placed with respect to CRC, e.g., to define goal specifications, to provide online corrections when robots commit rare, but inevitable errors, or to support and maintain robots.”
2
Besides, from the perspective of HRI, more complex, nuanced, and flexible interaction among heterogeneous multi-robot–human teams shall be further developed. Based on this review paper and its corresponding diagram (Figure 3), researchers may further advance CHRC through: 1. Bringing heterogeneous team inspirations (e.g., from the inter-species relationship in nature and game theories) into collective construction systems involving diverse human roles and robotic types; 2. Iteratively transferring collective construction systems from a simulated or controlled lab environment into real-world construction settings and building environment,
129
and this requires more considerations of problems such as latency, tolerance, control, and management; 3. Creating proof-of-concept projects to set cornerstones in adapting techniques and methods from the neighboring field (e.g., HRI, CRC) into the discipline of architecture and design; 4. Leveraging fluid and dynamic control and communication models88,95,99 to distribute design decisions (e.g., co-design strategy
124
) and form complex structural and material systems;13,132 5. Developing management strategies to prepare for a safe, efficient, and flexible application of CHRC on site; 6. Investigating topics of group creativity and social dynamics in heterogeneous human–robot teams. For example, one can imagine scenarios where humans improvise with robots in addition to pre-composed assembly procedures to achieve site-specific structures. Alternatively, one can also utilize human–robot group creativity for emergency management at the construction site; 7. Rethinking the roles of design and construction professionals, specifically in how to best allocate humans’ capabilities and attention, given the potentials and constraints of robotic intelligence and kinematics (e.g., ROD36,37); and 8. Exploring new forms and functionalities of space, providing dual dimensions in physical structure and embodied control. For example, smart devices and wearable can be designed to empower human body with higher sensibility and capability when collaborating with robots. Thus, more fabrication strategies using mixed or hybrid reality can be developed to provide additional platforms for humans, computers, and robots to create and construct collectively.
Conclusions
Both robotic systems and human groups in the construction sector observe a trend toward decentralization and collaboration. This review’s purpose is to identify gaps between Collective Robotic Construction (CRC) and Human–Robot Interaction (HRI) literature to define a new research domain in Collective Human–Robot Construction (CHRC). Both CRC and HRI are young but active research domains, and there are on-going discussions on how humans can interact with collective robotic systems. However, there is a less-touched research space in reviewing human collectives (e.g., institutions, professions, corporations) in relation to multi-agent robotics, as well as one targeted toward the construction industry connecting collective robotic tools with the existing operational and informational structure such as BIM. This paper reveals promising research areas in bridging the collectives (humans and robots, see Figure 3). Developing CHRC is essential for leveraging robotic technology within the existing building industry to create scalable impact. By combining humans and robots’ collective intelligence and capabilities, we can increase efficiencies (in communication, material processing, and fabrication) and create formal and organizational structures that are far more complex than either party can create alone. Thus, the emphasis on human elements in robotic construction reveals potential for a safe and pleasant collaboration model where human creativity and sensitivity can be best manifested. By bringing these two seemingly disparate research areas together into the field of construction, we can open up previously unknown possibilities for architecture and design.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.