
Abstract
This article outlines engineering challenges that were involved in the design innovations required to successfully deliver not one but two landers for Viking. The mission faced unique challenges such as dealing with Mars’ thin atmosphere, managing entry heating, soft landing, and adhering to launch payload constraints. These necessitated the development of new technologies and designs, including a bio-shield, an aerodynamic aeroshell, a thermal protection system, a supersonic parachute, and a terminal descent propulsion system. The developments took no more than 8 years, but their legacy has lasted far longer and has enabled Mars lander mission successes for five decades. With the emerging emphasis on human missions to Mars, the challenges of landing larger payloads will require new innovations and approaches to entry, descent, and landing, which will represent a grand new challenge for scientists and engineers.
Introduction
The objective of Viking was to increase significantly human knowledge of the planet Mars through orbital observation and on-surface direct measurements of data relevant to assessing the possibility of Martian life in the past, present, or future (Corllis, 1974; NASA, 1976; Holmberg et al., 1980). The Viking mission demonstrated to the world that planets within the solar system are within our reach and not confined only to visual observation. The mission successfully placed two Viking landers onto the surface of Mars at two different locations and collected unprecedented scientific data at the surface and from orbit. Included in this data were results from instruments designed to conduct the first of its kind search for signs of life beyond Earth. The Viking landers obtained beautiful imagery and showed us a neighbor world with striking similarities to our own Earth’s deserts and mountains. All of this was possible because the entry, descent, and landing (EDL) challenges were overcome to successfully deliver two landers from orbit to the surface of Mars. Viking’s success on Mars was unsurpassed until 2020. While achieving first-ever engineering feats, the Viking mission established a “heritage” EDL approach and provided flight-proven systems for future Mars missions. We now sit at a key moment in Mars exploration history where exciting first-ever feats are again required to enable paradigm-shifting science and human exploration.
Mission, Design, and Execution—Unique Challenges Tackled
When approved by NASA in 1969, the Viking mission had an organizational structure distributed across NASA Headquarters (HQ), NASA Langley Research Center, NASA Jet Propulsion Laboratory (JPL), and NASA Lewis Research Center (officially renamed NASA John H. Glenn Research Center at Lewis Field on March 1, 1999). The program management resided at Langley, JPL managed the orbiter and mission control, NASA HQ provided executive oversight and funding, and Lewis had responsibility for the Titan-Centaur launch vehicles. Martin Marietta was responsible for lander development and reported to Langley. On the science side, there were 13 distinct principal investigators/teams for each instrument, and Dr. Gerald A. Soffen served as the overall Viking Project Scientist to coordinate the multidisciplinary science steering group (Corllis, 1974). Demonstrating the value of a well-coordinated multicenter endeavor, the Viking mission was hugely successful and stayed within the budget of $830 million (excluding launch cost and operations) approved in 1975.
While the Viking landers leveraged the experience gained throughout the Apollo program, they required entirely new design features and technologies to tackle challenges unique to delivering landers that weighed ∼575 kg (dry mass). The lander designers could not simply adopt an Apollo approach. Autonomously placing a lander on Mars was very different from landing humans on the Moon, which involved humans in the loop for terminal navigation and guidance. Delivering a lander to the surface of Mars also required dealing with the tenuous Martian atmosphere. While the atmosphere provided some drag, it also created heating during entry, which then required a thermal protection system (TPS). A supersonic parachute also had to be deployed at the right altitude and speed, and soft landing required transitioning to a retro-propulsion system designed to minimize damage to the landing area to preserve potential biosignatures. The entire integrated orbiter and lander system had to meet the launch mass constraint of the Titan IIIE-Centaur rocket of a mere 8000 lbs compared with the Saturn V launch capability of 100,000+ lbs. Innovative EDL component and integrated system design, engineering, and ground testing were all necessary to achieve success.
The following are some of those innovations:
A bio-shield that covered the entire aeroshell and sterilization procedures and was necessary to avoid contaminating the Martian environment with terrestrial microbes (Fig. 1). A new aerodynamically stable aeroshell shape to achieve the necessary deceleration during the entry phase through the uncertain and thin Martian atmosphere. A new, lightweight, robust, and mass-efficient TPS constructed from a Super Lightweight Ablator material (SLA-561V) specifically developed to protect the spacecraft from entry heating. A back shell structure made of aluminum and fiberglass composite. A supersonic parachute to slow the Viking Lander Capsule in the thin Martian atmosphere. An innovative retro-propulsion system for soft landing that minimized scorching the landing site. A controlled entry approach that utilized aerodynamic lift with an offset center of gravity and attitude control using reaction-controlled jets to successfully deploy a supersonic parachute at the right altitude and Mach number. A new altitude knowledge acquisition approach that used a combination of on-board accelerometers and aeroshell aerodynamic properties from 100 to 6 km and then a radar altimeter from 6 km to the surface.

The integrated Viking Orbiter with the Viking Lander Capsule (VLC) on the top, enclosed within the bio-shield (Credit: NASA).
It is worthwhile to note that Viking mission planning began in the mid-1960s, and the Viking project was approved in 1968, a year before the first human landing on the Moon. As the Apollo program dominated the world’s attention, Viking mission designers in the following 8 years had to ensure that every aspect of EDL requirements could be met. Extensive Mars-specific design, analysis, and testing had to be executed while ensuring new innovations such as the TPS material SLA-561 V and supersonic parachute design were qualified to meet the mission. The bio-burden sterilization requirement, which was unique to Mars, made the challenge even more difficult as all the hardware, including electronic components, had to be heat-treated as a first layer of protection, and a bio-shield was included as an additional layer of protection from contamination.
Viking 1 and 2 were nearly identical, and the concept of operations involved launching the orbiter along with the lander within the aeroshell, which then was covered by a bio-shield. After a ∼10-month journey and a month in orbit, the aeroshell was deorbited. The EDL segment was designed to be autonomous from deorbit to touchdown due to the distance involved (Holmberg et al., 1980). Upon arrival at Mars, the pre-selected landing sites were assessed to be too hazardous for landing. An alternate landing site had to be quickly selected for both Viking 1 and 2 (Siddiqi, 2018). This is very similar to the story of Apollo 11, where Neil Armstrong at the last minute had to hunt for a better landing site while running out of fuel. As a result, the first historic landing was moved from the originally planned bicentennial on July 4 to July 20, 1976. Added to this was the stress of not knowing what happened during the 7 min it took from orbit to landing and 22 min it took for the “success signal” to reach Earth. While it may not be remembered well today, landing was one of the greatest accomplishments of the mission and represents a major milestone in planetary exploration.
The mission design associated with the very first Mars EDL sequences (Fig. 2) differed in many significant ways from the Apollo Earth entry. The Viking 1 aeroshell separated from the orbiter on July 20, 1976, at an orbital velocity of about 4 km/s. A few hours after the initiation of the separation deorbit burn at about 300 km altitude, the lander was reoriented, and the entry phase began. The relative entry velocity at entry interface was 4.42 km/s, and the moderate lifting entry produced a peak heat flux of around 26 W/cm2 (Apollo’s peak heat flux was 20 times higher). At an altitude of about 6 km (3.7 miles) and a velocity of 900 km/h (600 mph), the parachute deployed at a supersonic Mach number of 2.2. After a few seconds, the heat shield was jettisoned, and the lander’s legs unfolded. At an altitude of about 1.5 km (5000 feet), the lander activated its three retroengines and was released from the parachute. The lander then immediately used retrorockets to slow and control its descent to achieve a soft landing on the surface of Mars. The landing rockets used an 18-nozzle design to spread the hydrogen and nitrogen exhaust over a wide area to limit surface heating and minimize damage and contamination around the landing site. The Viking 1 lander touched down in the western Chryse Planitia after an EDL phase that lasted a very long 7 min on July 20, 1976. Twenty-two minutes later, mission control learned of the successful landing. Viking 2 followed an identical EDL sequence and successfully deployed the second lander on September 3, 1976.
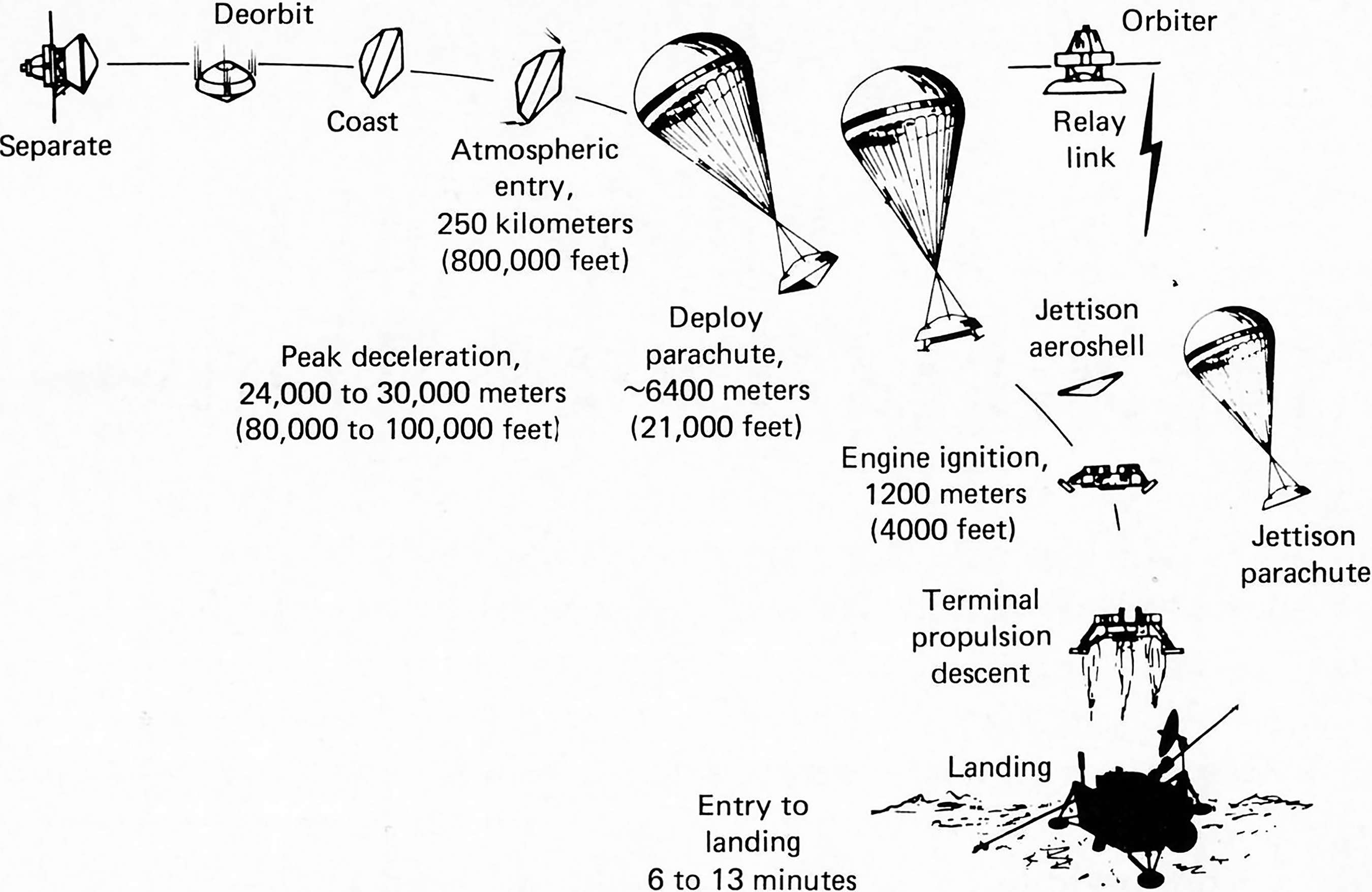
Mission sequence: Entry, descent, and landing (Corllis, 1974).
The Viking aeroshell was a 70° half-angle sphere-cone forebody shape, as shown in Figure 3, a departure from the Apollo heat shield’s spherical section shape. Compared to the successfully flown Apollo heat shield shape, the 70° sphere-cone shape provided better aerodynamic characteristics and stability, lower overall heating, and a more mass-efficient structure that was robust to buckling (Stephens and Anderson, 1976). It also allowed for deployment of the parachute at the optimum height, velocity, and orientation. More recently, Mars Sample Retrieval Lander designers implemented a study that compared the Apollo shape to that of Viking and concluded that a heritage Viking shape is preferable. It would provide better packaging of the payload along with mass and cost savings and would not require a new aerodynamic and aerothermodynamic database for the Apollo shape for Mars entry (private communication with Dr. Suman Muppidi, NASA Ames Research Center).
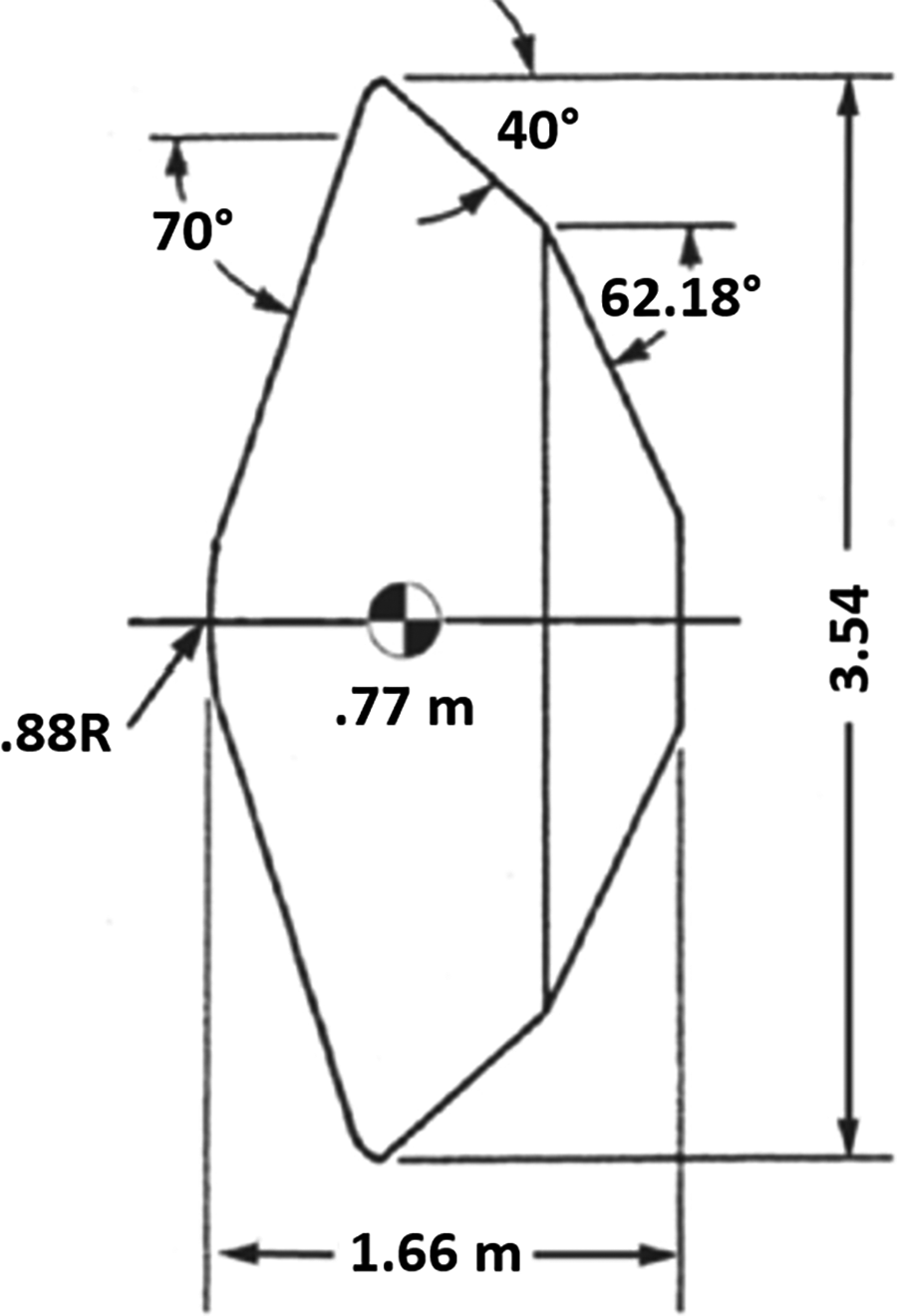
Viking Lander Capsule (VLC) geometry.
The TPS for the Viking heat shield had to be much lighter than the Apollo heat shield TPS. It was specifically developed for Mars entry by Martin Marietta Corp. The SLA-561V was made of room-temperature-vulcanizing silicone resin with granulated cork, silica, phenolic microballoons, and chopped Refrasil fibers manually pushed into a Flexcore honeycomb that was bonded to the heat shield structure (Strauss, 1968). The heating on the aluminum and fiberglass back shell structure was determined to be sufficiently low and, hence, not covered with any TPS unlike the heat shield.
The 16.15 m diameter disk-gap-band (DGB) parachute was successfully developed, extensively tested (Moog et al., 1974), and deployed around Mach 2.2 to slow the vehicle through transonic and subsonic speeds and low dynamic pressures ranging from 383 to 240 N/m2, in about 7 s.
Terminal landing used three monopropellant hydrazine engines (one affixed on each long side of the base, separated by 120°) with 18 nozzles to disperse the exhaust and minimize effects on the ground. The hydrazine was purified to prevent contamination of the Martian surface with terrestrial microbes. Control was achieved by using an inertial reference unit, four gyros, a radar altimeter, a terminal descent and landing radar, and the control thrusters. The packaging details of all the EDL hardware, including the lander and the bio-shield, are shown in Figure 4.
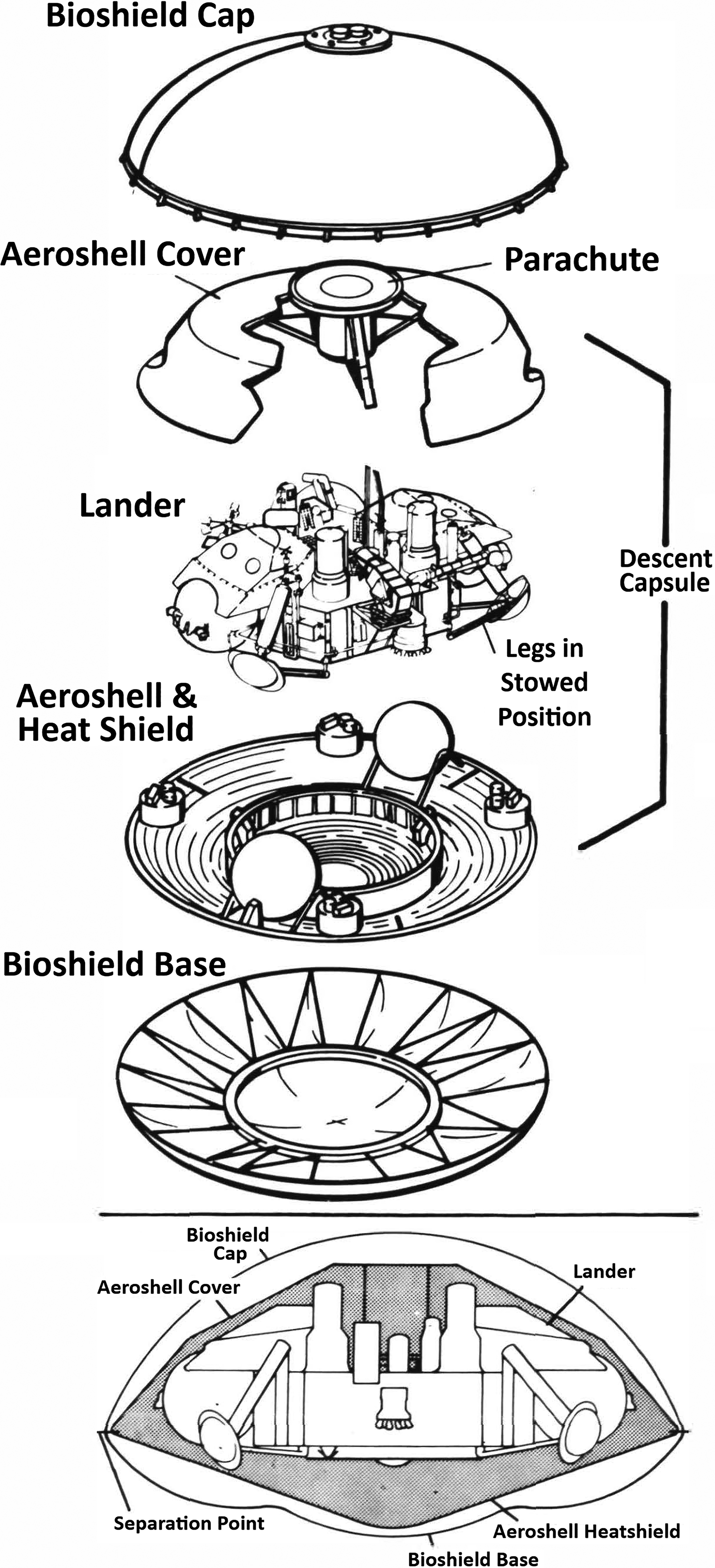
Exploded view of the Lander and EDL system (NASA, 1976). EDL, entry, descent, and landing.
Viking proved the targeting method for determining the landing ellipse size at Mars for unguided lifting entries. The landing ellipse was 280 × 100 km (area ∼22,000 km2). Since then, successive missions have considerably improved GN&C (Guidance, Navigation, and Control) hardware and software and achieved high precision with very small landing footprints. Mars 2020 (Perseverance), using Terrain Relative Navigation, achieved the smallest landing ellipse at Mars to date of 7.7 × 6.6 km (area ∼40 km2).
To define the physical and chemical state of the Martian atmosphere and its interaction with solar wind in the upper atmosphere, the composition and abundance of neutral species were determined by the upper atmosphere mass spectrometer (UAMS), and the retarding potential analyzer (RPA) was designed to measure the concentration and energy distribution of ions and electrons in the upper atmosphere. Both the UMAS and RPA were mounted on the aeroshell. In the lower atmosphere, pressure, temperature, density, and mean molecular weight were determined by pressure and temperature measurements together with data from the guidance system (Holmberg et al., 1980).
Viking EDL Heritage on Subsequent Planetary Missions
Viking was an EDL trailblazer. It provided significant knowledge for the design of future Mars missions, and the heritage Viking EDL established has impacted every subsequent mission to Mars, as well as missions to other planets.
The mission’s EDL sequence has largely remained the same with small variations and improvements. Viking separated from the spacecraft after orbit insertion, while all other Mars missions employed direct entry upon approach and entered the atmosphere at higher relative velocity. The Viking aeroshell forebody geometric shape, a 70° sphere-cone, has been repeatedly used by all successful Mars entry missions from Pathfinder to the most recent mission, Mars 2020. The Viking entry provided full-scale aerodynamic flight measurement in the hypersonic continuum to the free molecular regime. This allowed validation of computational fluid dynamic predictions (Blanchard and Walberg, 1980; Edquist, 2006). For the hypersonic entry phase, Pathfinder, the Mars Exploration Rovers (MERs), Phoenix, and InSight all used ballistic entry. While Pathfinder and the MERs used spin stabilization, Phoenix and InSight were designed with a nonspinning, three-axis controlled Reaction Control System, like that of Viking, to maintain spacecraft attitude during entry and up to parachute deploy. In actual flight, both Phoenix and InSight experienced lifting entry, and the attitude control was not needed in the hypersonic regime (Korzun et al., 2021). Mars Science Laboratory (MSL) and Mars 2020 deviated from Viking’s unguided approach by adopting Apollo’s GN&C strategy to control the lift vector through bank angle modulation to achieve the desired trajectory and landing accuracy. All the missions that followed Viking used a supersonic DGB parachute scaled to the need of each mission. All the Mars missions, following the Viking approach, ejected the heat shield after deploying the parachute and then released the payload. While Pathfinder and the MERs utilized airbags for impact attenuation during landing, Phoenix and Insight used Viking-style landing legs and retro-propulsion. MSL and Mars 2020, due to nearly twice the rover mass, used the novel “Sky-Crane” approach to land the Curiosity and Perseverance rovers. The Viking navigation and control system provided invaluable data and lessons learned that have been used to develop next-generation Mars EDL systems, which focus on greater accuracy and hazard avoidance capabilities for pinpoint landings. More recent missions incorporate advanced vision-based navigation and terrain-relative navigation to improve precision and safety.
Future Mars Missions and EDL Technology Challenges
The recently published NASA Mars Exploration Program 2024–2044 plan (NASA, 2024) calls out a transition from an era of solely robotic exploration of Mars to the first human Mars missions and an eventual sustainable human/robotic presence. It identifies EDL at Mars as one of six critical technology domains to enable more affordable and capable missions to support the Mars science infrastructure, broaden accessibility for hard-to-reach areas of the Martian surface, and improve access to the Martian subsurface. A potential approach to lower-cost access is to develop greatly simplified “rough” landers that could reach the surface safely without needing a parachute or propulsion system, with avionics and instruments that are ruggedized to survive large landing forces. Other potential approaches include lowering the ballistic coefficient of atmospheric entry systems by using deployable entry drag devices, which would reduce the cost and improve the performance of descent propulsion systems, and developing high-performance impact attenuation devices with lower mass and cost. Future aerial mobility systems could be deployed at altitude to avoid the need for a traditional landing system.
The EDL technologies established with Viking have served NASA’s robotics science missions well for decades but are limited to a landed mass of 1 mT). Braun and Manning (2007) showed the limitations of the Viking era EDL technology to deliver any scientific payload higher than 1 mT due to the thin atmosphere and the limitations associated with aerodynamic decelerators (parachutes primarily) to achieve the desired deceleration. While Viking delivered a 576 kg lander in 1976, the limit of the EDL technology was achieved by the Mars 2020 mission with the delivery of a 1026 kg rover.
The primary motivation to deliver much heavier payloads, of the order of tens of metric tons, comes from requirements for human missions to Mars. The emerging powerful superheavy launch systems are necessary but not sufficient to deliver higher mass. The Viking era EDL paradigm has to be modified from the use of rigid blunt capsules and parachutes to more capable deceleration systems. Since Braun and Manning’s study, with human missions to Mars in mind, numerous NASA-sponsored studies have been undertaken to assess novel EDL approaches and technologies required to achieve landing larger payloads (tens of metric tons) at high elevations and with pinpoint accuracy. These include large mechanically deployable, inflatable deployable, or rigid lifting body configurations combined with supersonic retro-propulsion (Polsgrove and Dwyer-Cianciolo, 2016; Dwyer-Cianciolo and Polsgrove, 2018; Percy et al., 2018). The SpaceX Starship concept in current development (Heldmann et al., 2022) as part of the Human Landing System program for Moon Base is a mid-L/D entry system that is also envisioned for Mars EDL using supersonic retro-propulsion in descent for landing human-class payloads. An alternate concept recently announced by Blue Origin adopted the NASA-developed (Limp, 2025) mechanically deployable Adaptable Deployed Entry and Placement Technology entry system (Venkatapathy et al., 2011), which will first aerocapture into orbit before performing EDL at Mars. This concept will also require supersonic retro-propulsion. These approaches are complex and will take considerable resources and time to fully develop before they can be employed for human-scale landing missions at Mars. Until large, landed mass capability is demonstrated, Mars missions will continue to employ the Viking EDL approach.
Technology innovations in precision landing, supersonic retro-propulsion, aerocapture, deployable entry systems, easy-to-manufacture and easy-to-integrate TPSs, robust modeling and simulation of EDL systems, and novel impactor or penetrator systems will lead to a plethora of ways of performing EDL. The emerging commitment to demonstrate EDL for human-scale missions and increasing commercial space capabilities will open the next exciting chapter in Mars exploration.
Limitations of Heritage Technologies
While heritage has served NASA well, its applicability must always be questioned. For example, SLA-561 V, the heritage TPS from the Viking missions, had to be reconstituted due to lack of use in the intervening two decades between Viking and Pathfinder, and requalification was required for each subsequent mission, which involved new ground test campaigns and associated analysis. Then, in the case of MSL, during arc jet testing for requalification, SLA 561 V experienced catastrophic failure, and MSL had to switch to tiled Phenolic Impregnated Carbon Ablator (PICA) (Slimko et al., 2011). The lessons learned from the MSL experience are that the choice of heritage subsystem, TPS, or any other is only cost-effective when the well-maintained capability can meet or exceed the mission requirement through requalification. However, when a material or subsystem atrophies or the capability needed exceeds the performance limit, a new or an alternate option will be needed, as was the case for MSL and Mars 2020. Tiled PICA atrophied soon after it was made for Mars 2020. NASA developed and qualified a variant called PICA-D for the Dragonfly mission to Titan when a key constituent became unavailable. Supply chain and space industrial base capability challenges are likely to require alternatives to heritage TPS options based on history.
Experiences since the Viking missions illustrate the challenges a mission design team faces when deciding whether to baseline heritage systems. There are inherent risks with any alternate that is either new or requires engineering development. When mission cadence is once or twice a decade and the mission selection process involves competition, heritage arguments are often invoked to present an acceptable risk posture, true or not. However, mission design may impose EDL requirements that heritage systems may not be able to meet; hence, a newer technology may be needed. A well-chosen heritage system, when it is verified to meet the mission requirement earlier in the design cycle, can provide cost and time savings. The lesson learned from the MSL experience, needing to switch from SLA-561 V to tiled PICA right around the Critical Design Review, is a case where baselining heritage was not successful. MSL had to develop a brand new tiled-PICA heat shield that resulted in a significant increase in cost and schedule. Interested readers can find more details in “MSL Heatshield Development: From Failure to Success” (Slimko et al., 2011).
The experience to improve on the Viking-era DGB parachute offers a different lesson. Post MSL, anticipating that future Mars missions will need a heavier than 1 mT payload delivery capability, NASA invested $200 M in a JPL-led Low-Density Supersonic Decelerator (LDSD) project to develop an alternative to the Viking DGB parachute that could offer higher Mach number capability. Multiple concepts were pursued: Modified parachutes, Supersonic Inflatable Aerodynamic Decelerator (SIAD), and Trailing Ballute (TB). Though the modified parachutes initially failed, the SIAD and TB efforts were successful (O’Farrell et al., 2016). Following LDSD, an Advanced Supersonic Parachute Research Experiment (ASPIRE) program was pursued to develop a more robust parachute for Mars 2020, leveraging the lessons from LDSD. ASPIRE succeeded with three tests (Mach 1.8–2.5) by improving the Viking heritage DGB parachute with more robust material (Tanner et al., 2018; Dutta, 2020). Mars 2020 was able to use the improved DGB parachute, whose heritage traces back to Viking, with high confidence.
Looking to the future, the challenges, on the one hand, for lower-cost robotic science missions and, on the other hand, for landing tens of metric tons of payload and humans at Mars will demand innovation in EDL approaches to address the needed performance, cost, and cadence goals. Unlike during the Viking era, many nations have developed EDL capabilities and are on the path to offer both collaboration and competition. The future for Mars exploration looks exciting. Like Viking, there will be many first-ever achievements.
The Viking lander missions will always remain the first missions that showed us the way to other worlds in our solar system. Now, though, is the time to get there affordably, frequently, and massively.
Footnotes
Acknowledgments
D.B.H. and E.V. acknowledge the encouragement and feedback from Mary Beth Wilhelm and appreciate the feedback and discussions with Peter Gage, Jeremy Vander Kam, and Suman Muppidi.
Authors’ Contributions
E.V.: Conceptualization (lead), research (lead), and writing original draft (lead). D.B.H.: Conceptualization (co-lead) and writing original draft (support).
Author Disclosure Statement
No competing financial interests exist.
Funding Information
D.B.H. and E.V. wrote this article as NASA civil servants.
Associate Editor: Michael A. Meyer