
Abstract
Studies of the diffusion of policies tend to focus on innovations that successfully spread across governments. Implicit in such diffusion is the abandonment of the previous policy. Yet little is known about whether governments abandon policies that have failed elsewhere, as would be consistent with states acting as policy laboratories not only for policy successes but also for failures. This article focuses on the possible abandonment of failing welfare-to-work policies in the formative years (1997–2002) of the Temporary Assistance for Needy Families (TANF) program across the 50 U.S. states. Using a dyad-based event history analysis, I find that, if both states in a pairing have a policy and one state’s policy fails (in employing welfare recipients, reducing welfare rolls, or reducing overall poverty rates), then the other state is much more likely to abandon that failing policy. Moreover, such learning from the other state’s experience is more common when the states are ideologically similar to one another and when the legislature in the potentially learning state is more professional.
Keywords
Under what conditions do politicians abandon failing policies? Scholars have long been concerned that policymakers will refuse to admit their mistakes and reverse their ill-fated policies, lest voters see them as incompetent (e.g., Bardach 1976; Durr 2001; Fernandez and Rodrik 1991; Harrington 1993). Yet federal systems may offer subnational governments a partial remedy to the problem of abandoning policy failures without prohibitively high political costs. In such systems, states and localities are often viewed as policy laboratories, in which policy experiments are tried and in which governments learn from one another’s successes and failures. If such laboratories work as promised, policymakers should be able to point to others’ failures as a justification for policy abandonment, even if their own policy has yet to fail or even if they do not wish to openly acknowledge their own failures.
There is substantial evidence that the subnational governments in federal systems do act as policy laboratories. For example, recent scholarship uncovers the rapid spread of successful innovations through a process commonly referred to as policy diffusion (e.g., Gilardi 2010; Meseguer 2006a; Volden 2006). Yet, much less is known about the systematic abandonment of policies and whether the concepts of policy laboratories and policy diffusion are relevant to policy failures as well as successes. Indeed, whether based on learning or on other mechanisms (Shipan and Volden 2008), studies of policy diffusion may be biased, in that they tend to focus on new policies that spread broadly across governments. Across such areas as lottery adoptions (F. S. Berry and Berry 1990), antismoking measures (Shipan and Volden 2006), or pension privatization (Brooks 2005), scholars have examined policies that have been adopted widely, rather than failed policy experiments. The reason is simple—when looking for evidence of policy diffusion, focusing on policies only adopted by a handful of governments and then abandoned does not generate enough data and variation to conduct strong statistical analyses.
In this context of examining only successful diffusions, finding geographic or other patterns of policy adoption is consistent with a story of learning from the successful policies of similar states and adopting a policy based on that information. For example, it is often thought that geographic neighbors adopting one another’s policies is evidence of diffusion. However, if scholars were to focus on policies that failed to spread, perhaps geographic neighbors should be less likely to adopt one another’s policies because those neighbors had a privileged, close-up view of just how bad that policy was (Mooney 2001).
And yet any study of successful policy adoptions implicitly contains elements of a study of the abandonment of failed policies, for the new policy is replacing something that was no longer as attractive to policymakers (Bardach 1976). However, without explicitly examining the nature of the policies that are abandoned, we are left wondering: Do governments abandon policies that are seen to be ineffective in other polities? Is the learning about one another’s policy failures a conditional process? For example, are the policy experiences of other similar governments more valuable to policymakers, perhaps because they share the same concerns, pressures, and outlooks? And are some governments better positioned to learn such lessons from others, perhaps because they have the resources to study and understand the details of failed experiments elsewhere?
This article explicitly examines the role of policy diffusion in the abandonment of failed policies. Focusing on welfare policies across the U.S. states following the 1996 welfare reforms, I look at what policies are abandoned in attempts to formulate new and potentially more effective welfare-to-work programs. Specifically, I describe 26 components of states’ welfare policies that were likely to influence how successfully each state employed current welfare recipients, moved recipients off of the welfare rolls, and ultimately reduced poverty in the state. I then focus on all pairs (or dyads) of the 50 states to see which were utilizing policies that were similar on these 26 dimensions. Over time, one state in the pair may change its policies to abandon policy components that the two states shared or, on the other hand, converge on still more policy components. I examine such policy changes to test whether the abandonment of shared policies by State A is related to policy failure in State B. Put simply, I seek to test whether, and under what circumstances, states abandon policies that were found to be unsuccessful in other states.
This work, therefore, follows the approach of dyad-based event history analyses recently embraced in policy diffusion studies that assess whether new policies are adopted when there is evidence of such new policies’ effectiveness elsewhere (e.g., Boehmke 2009; Gilardi 2010; Gilardi and Fuglister 2008; Volden 2006). But it turns such an analysis on its head, studying not the new policies but those that have been abandoned in the process. If policy diffusion is based on learning about the effectiveness of policies and seeking more beneficial policies, then we would like evidence not only that policies found to be successful elsewhere are adopted but also that policies that fail elsewhere are abandoned. Taken together, such studies would reinforce scholarly views (e.g., Volden, Ting, and Carpenter 2008) that policy diffusion is not just the adoption of similar policies by similar states but rather, at least in many cases, a learning process leading to more effective policies over time.
The article proceeds as follows. I begin by developing a series of hypotheses about the abandonment of policy failures based on learning and policy diffusion. I next describe the context of welfare reforms and the variables needed to test these hypotheses in this context. I then detail the results of those empirical tests before offering implications and conclusions. Throughout the article, I will often be referring to governments as states. This is mainly due to the context of the data to be analyzed in later sections. It should be noted that the concepts developed here should likewise apply to learning and diffusion across countries, across localities, or in other contexts entirely, like the decisions to innovate by firms or farmers or physicians (e.g., Rogers 2003).
A Theory of Policy Diffusion and Policy Abandonment
Because any new policy adoption is by implication an abandonment of the old policy, a theory of policy abandonment must contain the same elements as a theory of policy adoption. 1 In classical theories of policy adoption, policymakers are thought to pursue a variety of goals, from re-election and reappointment to gaining power and prestige to bringing about effective public policies. Whether motivated by electoral pressures or policy goals, such policymakers would, all else equal, benefit from adopting policies that more effectively address policy needs. In the context of policy diffusion, this means that policies found to be successful elsewhere are more likely to be adopted if they are not in place already (Meseguer 2006a; Volden 2006).
In a similar vein, policy failures would be expected to be abandoned. A policy may be thought to fail based either on political or policy criteria (e.g., Gilardi 2010; Rom 2006). On political grounds, a policy failure may result in a political crisis, loss of support from the public, or even the removal of a policymaker from office. On policy grounds, a failure occurs when the policy does little to remedy a policy problem or when it brings about significant harmful side effects. Although the empirical analysis below focuses on policy innovations that fail on policy grounds, rather than political grounds, the theory presented in this section applies to both cases. While a government can learn from its own failures, the policy diffusion concept implies the possibility of also learning from the failures of others. Specifically, we should expect that policies that are found elsewhere to be ineffective will be abandoned. This simple idea can be expressed as follows.
Of course this hypothesis does not characterize an absolute rule. Some ineffective policies may have strong political backing, some alternative policies may be just as unattractive as the current failing policy, and some policymakers may be better able to learn from the experiences of others (May 1992). Indeed, rather than a universal law, the Abandoning Policy Failures Hypothesis proposes a pattern that is likely to be uncovered upon controlling for these other factors in the public policy process. Rather than ignore the complexities of that process, scholars may be able to form reasoned expectations about the mechanisms behind the abandonment of policies that fail elsewhere.
For example, if policies that fail in one polity are no more or less likely to fail elsewhere, there should be no learning from one government to the next. Although it is unreasonable to believe that the effects of policies are uncorrelated across polities, it is likewise unreasonable to expect those correlations to be the same for any two governments chosen at random. Rather, governments facing similar political and policy environments are more likely to share political and policy consequences from adopting the same policies. Therefore, we might expect that the lessons of a policy failure elsewhere will be taken to heart across similar states than across divergent states.
Along similar lines, Volden, Ting, and Carpenter (2008) offer a game theoretic model of such learning and policy diffusion. In their model, states differ in a unidimensional space that could be thought of as political ideology, with some states drawn toward more leftist and some drawn toward more rightist policies. Policies are themselves located in this space, but with their levels of effectiveness unknown prior to experimentation. Upon policy adoption, the effectiveness of those policies may be discerned. For some states, such evidence is discounted because they prefer the extreme right or extreme left policy regardless of its effectiveness. But for other, more moderate states, evidence that a chosen policy is ineffective or that states with ideologically similar preferences have abandoned that policy is sufficient to lead those moderate states to abandon the failed policy. It is the combination of ideological proximity and policy effectiveness that together explain whether new policies are adopted and old policies abandoned.
Taken together, these concepts provide the foundation for the following hypothesis.
Such a similar-states effect could arise through many different means. A theory based on bounded rationality, for example, might suggest that limited information is used to make decisions, and the heuristic of only considering ideologically similar states may be compelling. 2 Alternatively, perhaps policymakers tend to interact and learn the most from those with similar ideological views. Moreover, perhaps the experiences of ideologically different states are discounted because such states’ populations and current policies differ in important ways that make the lessons of one state inappropriate for the other. All such arguments suggest that learning may be conditional on the ideological similarity between any two states.
While other similarities across states may be important in the learning process, the Learning from Similar States Hypothesis characterizes a key political similarity. One might likewise imagine that states with similar budgetary characteristics and demographics or states that are geographically proximate might be more likely to rely on evidence of policy failure from one another. Rather than characterize all such relations, the examination in this article focuses on the key political aspect isolated in the Volden, Ting, and Carpenter (2008) article. Nevertheless, I note below which of these other similarities affects the learning processes across the states uncovered in the data analysis.
The Learning from Similar States Hypothesis therefore posits that the nature of the relationship between pairs of governments influences the diffusion of information about policy failures. In addition, for such learning to take place, governments must have the capacity to learn. This may be more difficult than it sounds. Learning about the details of complex policies adopted by other governments and the effects of those policies on the target population may take some nontrivial research. Ideally, extensive policy research is conducted to uncover the effects of different policies. At a minimum, information about other governments’ policy experiences is needed. Such capacity is needed even when a government has experimented with a policy itself. Although little modification may be desired or needed if the policy is a success, the root cause of failure is more difficult to discern. Especially for complex policies, with many different elements, it is difficult to discern which changes will move the policy outcome in a favorable direction and which will make it worse. Relying on the broad set of experiments of other states may generate the information needed to resolve this puzzle.
For professional legislators with well-established policymaking networks, this information may be easier to obtain. Large staffs can gather information, querying officials around the country regarding what aspects of the policy have worked for them. Full-time legislators can explore the implications of that information, helping advance policy changes through the legislative process. However, in many state legislatures, legislators are unpaid, have limited staffs, serve only in short sessions, or only meet every other year. Although attuned to dealing with pressing issues, these legislators may not be as well positioned to research the implications and effects of detailed policies found in other states. Therefore, one might expect that more professional state legislatures are more likely to learn from policy failures elsewhere. Such a hypothesis is consistent with Shipan and Volden’s (2014) evidence of legislative professionalism facilitating the diffusion of successful policies limiting youth access to tobacco across the American states.
While far from exhaustive, these three hypotheses outline the broad parameters of learning-based policy diffusion resulting in the abandonment of failing policies. 3 They provide the basis to answer the key questions: Do governments abandon policies found to be ineffective elsewhere? If so, which governments are best suited to policy learning? And from whom do they learn? Taken together, the answers to these questions will advance scholarly understanding about learning and policy diffusion beyond its current focus on the adoption of successful policies.
The Empirical Context of Welfare Policymaking
To test the hypotheses developed in the previous section, I focus on the empirical case of welfare policymaking in the United States from 1997 to 2002. While many states experimented with their welfare policies via welfare waivers prior to the 1996 national welfare reforms, after these reforms, state experimentation spread dramatically, especially during the first few reform years prior to states settling on their chosen policies and turning their attention elsewhere. The new welfare-to-work program, Temporary Assistance for Needy Families (TANF), ended the entitlement status of welfare, meaning that recipients could and would be removed from the welfare rolls after a short number of years (typically two continuous years, with a lifetime limit of 5 years). How recipients would most successfully move from welfare to the workplace was an open question, ripe for experimentation. Over the first six postreform years, states modified various aspects of their welfare policies hundreds of times. This policy area therefore could be one in which states learn from the failures of other states in deciding which policy components to abandon in their quest for effective welfare policies. Although major studies have examined the policies adopted by the states following the 1996 reforms (e.g., Fellowes and Rowe 2004; Keiser, Mueser, and Choi 2004; Soss et al. 2001), scholars have not typically looked for evidence of diffusion in this area beyond geographic neighbors (but see Volden and Cohen 2010). Such a focus on geographic diffusion is largely a result of the significant debate over whether welfare politics has generated a “race to the bottom” in benefits and eligibility criteria (e.g., Bailey and Rom 2004; Peterson and Rom 1990; Volden 2002).
If welfare diffusion is based on learning about policy effectiveness, however, there is no reason to restrict examinations of potential diffusion relationships solely to geographic proximity. To test for learning processes, it is essential to carefully examine the most significant aspects of welfare policies and how they change across all the states over time. The Urban Institute recorded all states’ policies for welfare during this postreform era in its Welfare Rules Database. The database, constructed from state policies specified in casebooks given to welfare caseworkers, contains hundreds of minute details of the state policies, ranging from who was eligible to what benefits were given to what activities met federal standards of engaging recipients in work-related activities. In identifying which of these hundreds of components to study, I relied on three criteria: (1) the policies needed to vary substantially across the states, (2) the policies needed to vary substantially over time, and (3) the policies needed to be broad and important enough that other states could discern whether they actively affected the program’s success or failure. In so doing, I isolated 26 components of each state’s TANF policy to study here. 4
Put simply, these policy components represent a middle ground between broad-brush policies and detailed minutia. Broader categories, such as “Did the state require work activities of their recipients?” would not produce any significant variation across the states. Narrower categorization, such as “What is the state response for each month of violating certain types of work requirements?” would yield so much state-by-state variation that no two policies would look similar at all. Rather, the components studied here highlight the broad outline of any state’s welfare-to-work policies, ensuring comparability across these main significant elements of each TANF program. These policy components include such important choices as the number of hours of work-related activities required to maintain eligibility, which activities count (from education through on-the-job training through job searches), benefit levels, time limits, and the use of family caps, transitional child care, diversion programs, waiting periods, and asset tests. As of 1996, it was unclear which of these components would best transition recipients from welfare to work and potentially out of poverty. These components are similar to those used by earlier scholars focusing on key early decisions by states under the TANF program (e.g., DeJong et al. 2006; The Urban Institute 2000).
Data Structure and Variable Construction
Having isolated these 26 crucial TANF components, we need to analyze why states abandoned a particular set of policies in favor of a new alternative. One approach to such an analysis builds directly on the state-year event history analysis brought to the diffusion literature by F. S. Berry and Berry (1990). They study conditions under which states adopted lotteries. Their dependent variable takes a value of zero in each state in each year prior to lottery adoption and one in the year of adoption (with the state removed from the data set thereafter because it was no longer at risk for an adoption). This dependent variable is then explained by internal state characteristics, such as political, demographic, and financial considerations, and by a geographic diffusion mechanism (a variable capturing the number of neighboring states that already had a lottery). Because the dependent variable is dichotomous—states either had a lottery or not—Berry and Berry’s explanation for the adoption of a lottery is also the explanation for the abandonment of the “no lottery” policy. Here, however, any of the 26 components of welfare policy could be abandoned—so a more complex data structure must be examined.
Specifically, instead of each observation being a state-year, we could examine each policy choice simultaneously by characterizing each observation as a state-policy-year, in which the state in any given year could change any of its 26 policies. This approach would be a form of repeated events analysis (Box-Steffensmeier and Zorn 2002), such as that utilized by Shipan and Volden (2006) to simultaneously study three different types of state antismoking legislation. The diffusion mechanism analyzed could again be those of geographic neighbors, or could alternatively capture state similarities based on demographics (Case, Hines, and Rosen 1993) or ideology (Grossback, Nicholson-Crotty, and Peterson 2004), depending on how other states’ policies are deemed to affect one another. Such an approach has not, however, been used to study whether more successful or less successful policies spread differently across the states.
However, an alternative approach, suggested by Volden (2006), allows success and failure to be captured in a straightforward manner. Examining the Children’s Health Insurance Program (CHIP), Volden constructs a dyad-year event history analysis in which the unit of analysis is each pair of states in each year. In his study, the dependent variable takes a value of zero if State A in the pair did not move its policy on the many CHIP policy components toward the policy in State B. If, however, State A adopted components found in State B, the dependent variable takes a value of one. Volden uses this approach to then test whether policies found to be successful in State B were more likely to be adopted by State A, whether similar states adopted similar policies, and so forth. Such an approach has recently been widely assessed and adopted to study many aspects of policy diffusion (e.g., Boehmke 2009; Gilardi 2010; Gilardi and Fuglister 2008; Shipan and Volden 2014).
Given how easily this dyad-based approach can capture the complexities of multifaceted policy choices and how straightforward it is to incorporate evidence of success or failure in this context, I, here, rely on the dyad-year event history analysis approach. However, because the focus of this study is on policy abandonment rather than policy adoptions, the dependent variable must be specified in a slightly different manner. Specifically, I again look at each pair of states. If State A adopts a policy change, altering any or all of its 26 TANF components, that change may include the adoption of a policy found in State B or the abandonment of a policy that had previously been shared by States A and B. 5 If a majority of components that are modified are abandonments of shared policies, then the dependent variable is given a value of one. 6 If, on the other hand, State A is not abandoning policies found in State B (or if it is moving closer to State B on a majority of component changes), then the dependent variable is given a value of zero. 7
For example, consider the policy changes adopted in Maine in 1999. Although policymakers kept most of their TANF program intact, they modified three key elements. First, monthly payments for a family of four were increased from $526 to $581. Second, the program was modified to allow high school or General Educational Development (GED) work to count toward the activities requirement; but, third, the activities requirement was raised from 20 hours per week to 30 hours per week. In combination, these three changes moved Maine’s policy closer in alignment to some states and further away from others. For example, the changes moved Maine toward Vermont, both in terms of its monthly payment and in counting high school education for the activities requirement. In contrast, Maine moved away from New Hampshire, which remained at 20 hours of activities requirements and did not count high school and GED work toward that amount. Although Maine’s payment level increased toward the $613 monthly payment in New Hampshire, the dependent variable for the Maine–New Hampshire dyad in 1999 is coded as a 1. That is, of the three components that Maine changed, a majority (two out of three) moved Maine away from New Hampshire.
Put simply, the dependent variable in this analysis classifies whether, through the abandonment of shared policies, States A and B move further apart. Given this dyadic approach, up to a total of 14,700 observations are used (50 states × 49 potentially emulated states × 6 years). 8 Each of the 50 states may abandon policies in each year that have been attempted previously by any of the other 49 states. 9 That said, a high degree of care must be taken in examining the data in this dyadic format. When a state changes its welfare policies, it is ultimately making one choice, rather than 49. By generating 49 observations, we run the risk of significantly deflating the standard errors on the coefficients that are estimated and thus overestimating their statistical significance. To account for this concern, it is crucial to adjust those standard errors through the clustering techniques described below. Doing so, the coefficients that emerge then capture the average effects across the dyads. For example, if a state abandons a policy shared only with failing states, the effect of failure on abandonment will be much more pronounced than if the state abandons a policy found among a mix of failing and succeeding states. In the latter case, the average of those successes and failures indicates that failure had little effect on the choice to keep or abandon the policy.
The key independent variables therefore classify whether the policies of State B had been effective in securing major welfare-to-work goals. If those policies had been failures, then the abandonment of previously shared policies should be more likely, according to the Abandoning Policy Failures Hypothesis. Given that the states may have had different goals for their welfare-to-work programs (e.g., Lichter and Jayakody 2002; Meyers, Riccucci, and Lurie 2001), I, here, rely on three separate measures of policy failure. The first measure is Proportion of Adult Recipients Unemployed in State B. This variable, giving the ratio of current adult recipients not engaged in gainful employment to all current recipients, can clearly capture the initial failure of welfare-to-work programs. 10 Employing recipients while still on the welfare program is necessary to eventually move them off of welfare, into the workforce, and potentially out of poverty.
A second failure measure is Increase in Recipients in State B. This is the proportional increase (or decrease, for negative values) in welfare rolls between 1996 and the current year of the data set. 11 Because welfare rolls were expected to decline following the reforms, and that decline was expected to be more substantial each year, especially during the early years of the program, I normalize this variable by subtracting off the average proportional increase in recipients across all states in each given year. The variable thus takes a mean value of zero, but states that are failing on this criterion relative to the average state in a given year will receive a positive value, while more successful states attain a negative value. The third failure measure is Percentage Increase in Poverty in State B, characterizing the state’s increase in its poverty rate between 1996 and the present, again normalized to zero in each year. 12
For each of these three measures, a high score would indicate failure, while a low score would indicate success. If policy failure in State B makes the abandonment by State A of their shared policies more likely, then a positive coefficient on these independent variables should result from the data analysis. The size of that coefficient would indicate the degree to which evidence of policy failure increases the probability of that failing policy being abandoned by other governments. Below, I discuss interactions between these key independent variables and such factors as the ideological similarities between dyad states and legislative professionalism in State A to test the Learning from Similar States Hypothesis and the Learning by Professional Legislatures Hypothesis.
The three measures used here all capture what might be referred to as a policy failure rather than a political failure. Detecting political failures may be somewhat more difficult. Scholars could focus on electoral losses or declines in public opinion, for instance. But it is often difficult to link those measures to any specific policy being studied. Indeed, to the extent that the dozens of TANF program components are known to the public at all, it is likely through the success or failure of the overall policy, such as based on the number of recipients, poverty rate, and so on, as captured above. Future work on policy diffusion in the face of political successes or failure will benefit from a focus on high-profile programs or those that significantly affect the approval and support of policymakers.
Beyond measures of failure, a full characterization of the process of policy abandonment in this dyadic context requires also including variables that capture the relations between State A and State B, as well as variables capturing the characteristics of State B and of State A separately. Dyadic variables are included because it may be the case that State A is more likely to abandon policies found in other states that are similar or different from State A. Had this been a study of policy adoptions or policy convergence, rather than abandonments, it would be quite plausible that neighboring and similar pairs of states would adopt similar policies. Here, because of the analysis of abandonment or policy divergence, it may be plausible to suggest that dissimilar states will spread apart from one another. On the other hand, it may be a stretch to suggest that policymakers receive a significant benefit from actively distancing their policies from those found in different states; thus, perhaps no correlation should be expected across similar states. Regardless, controlling for this possibility is essential to minimize the likelihood of omitted variable biases affecting our relationships of interest.
The first such dyadic control variable is Geographic Neighbor, which takes a value of one if the two states in the dyad are geographically contiguous and zero otherwise. If states are less likely to abandon policies that are shared by their neighbors, this variable would take a negative value; it would be positive if they are more likely to abandon policies of their neighbors. Same Party Governor takes a value of one if both states in the dyad have a governor of the same party; otherwise, it is zero. Same Party Unified Government similarly captures whether the two states share unified control of their legislatures and governorship by the same party. In both cases, a negative coefficient would indicate a policy divergence among dissimilar states on these political grounds.
Absolute Difference in Government Ideology is constructed by using an updated version of the government ideologies for each state developed by W. D. Berry et al. (1998) and finding the absolute difference between the governments on this 100-point scale. A positive coefficient would indicate that governments with different ideological positions diverge from one another over time in their welfare policies. Population Ratio takes the larger state in the dyad and divides its population by that of the smaller state. A positive coefficient on this variable would indicate states with very different population sizes moving their policies apart from one another. Absolute Difference in Minority Population captures the absolute difference between the two dyadic states in the proportion of their populations made up of minorities. A positive coefficient would indicate that racially divergent states are more likely to diverge in policy as well, with State A abandoning State B’s policy.
Absolute Difference in Per Capita Income takes a value based on the absolute difference between the two states in their per capita incomes, in thousands of dollars. Absolute Difference in Debt Ratio characterizes differences between the two states in their governmental debt relative to state government revenues. And Absolute Difference in Percentage Change in Revenue captures the relative direction of each state’s finances compared with the previous year. For all these fiscal health variables, a positive coefficient would signify the abandonment by State A of policies found in states that differ from State A on these financial criteria. In sum, these dyadic variables control for the geographic, political, demographic, and budgetary similarities between each pair of states.
Beyond these dyadic relational variables, conditions in State B and in State A may help determine whether shared policies will be kept or abandoned. Numerous early studies suggested that larger and wealthier governments served as policy leaders (Grupp and Richards 1975; Walker 1969), so it would be appropriate to also examine whether, in following these leaders, the policies of smaller and poorer states are abandoned. To do so, I include the Log of Population of State B and Per Capita Income of State B. 13 Negative coefficients on these variables would indicate the abandonment of policies found in State B when that state is less populous and comprised of residents with lower incomes.
Conditions in State A might also help determine whether policies are abandoned by that state. Because the welfare policies being considered here do not move in a consistently liberal or conservative direction—with some increasing the restrictiveness of welfare policies and some decreasing their restrictiveness, some increasing program costs and others cutting costs—it is unlikely that many of these variables will achieve statistical significance. Nevertheless, once again, because a plausible theoretical story could be offered for their inclusion in explaining policy change and abandonment, these variables are included as controls. In most cases, these variables match those of the State B and dyadic variables described above.
Most interestingly, the above measures describing the policy failures in State B are included for State A as well. To the extent that failing on these criteria yields a policy change in State A, we would expect a positive coefficient on Proportion of Adult Recipients Unemployed, Increase in Recipients, and Percentage Increase in Poverty. An indicator variable for Democratic Governor in State A is included, with the expectation of a positive coefficient if Democratic governors are more active in altering their welfare policies. Government Ideology in State A, using the W. D. Berry et al. measure discussed above, should take a positive value if more liberal states (with higher values on this measure) more actively replace their old policies with new ones.
Log of Population in State A and Proportion White in State A control for whether demographics influence the likelihood of policy change. Per Capita Income, Debt Ratio, and Percentage Change in Revenue capture financial and budgetary considerations in State A that might allow more policy experimentation. Finally, Legislative Salary in State A measures the level of professionalism among state legislators. 14 About 10 states offer no legislative salaries; the mean salary is just over $20,000, and a small number of states offer salaries sufficient to discourage second jobs, making full-time legislators. These differences reflect the time and dedication that legislators give in developing and adopting new policies. A positive coefficient would indicate a greater level of policy change among more professional state legislatures. All variable descriptions, sources, and summary statistics are given in the appendix.
Data Analysis Results
As discussed above, the unit of analysis is all pairs of states between 1997 and 2002, with the dependent variable capturing whether State A abandoned policies previously shared by States A and B. 15 Because this variable is dichotomous, a logit analysis is used. 16 Given concerns about temporal dependence (e.g., Beck, Katz, and Tucker 1998), year dummies are included to account for different hazard rates over time. Data are clustered by State A to account for the possibility that dyadic observations for the same state are not independent across pairings with various other states in a given year as well as across those pairings over time. 17 Huber–White robust standard errors are used to account for the possibility of heteroskedasticity.
The three models in Table 1 explore the impact of Proportion of Adult Recipients Unemployed on policy abandonment. Model 1 reports the results of a regression including only year dummies and this single failure measure, which is available for the years 1999–2002. 18 The statistically significant and positive coefficient on Proportion of Adult Recipients Unemployed in State B indicates that evidence of a failing policy in State B is associated with State A’s abandonment of State B’s policies. Specifically, each percent increase in adult recipient unemployment rates in State B corresponds to an increase of nearly half a percent in the odds that each State A will abandon State B’s policy in a given year. 19 Put another way, compared with an average state, if State B is one standard deviation above the mean in adult recipient unemployment, the likelihood of State A abandoning policies shared with State B is 7.4% greater. Different readers may judge this effect to be large or small. But it is worth considering that this effect is something of a ripple across states and over time. This state’s failing policy has about 7.4% greater odds of being abandoned by each and every other state sharing that policy in each year in which State B’s policy continues to fail. Such a cumulative learning effect is quite sizable when considered in this light.
Effects of Failure to Employ Welfare Recipients.
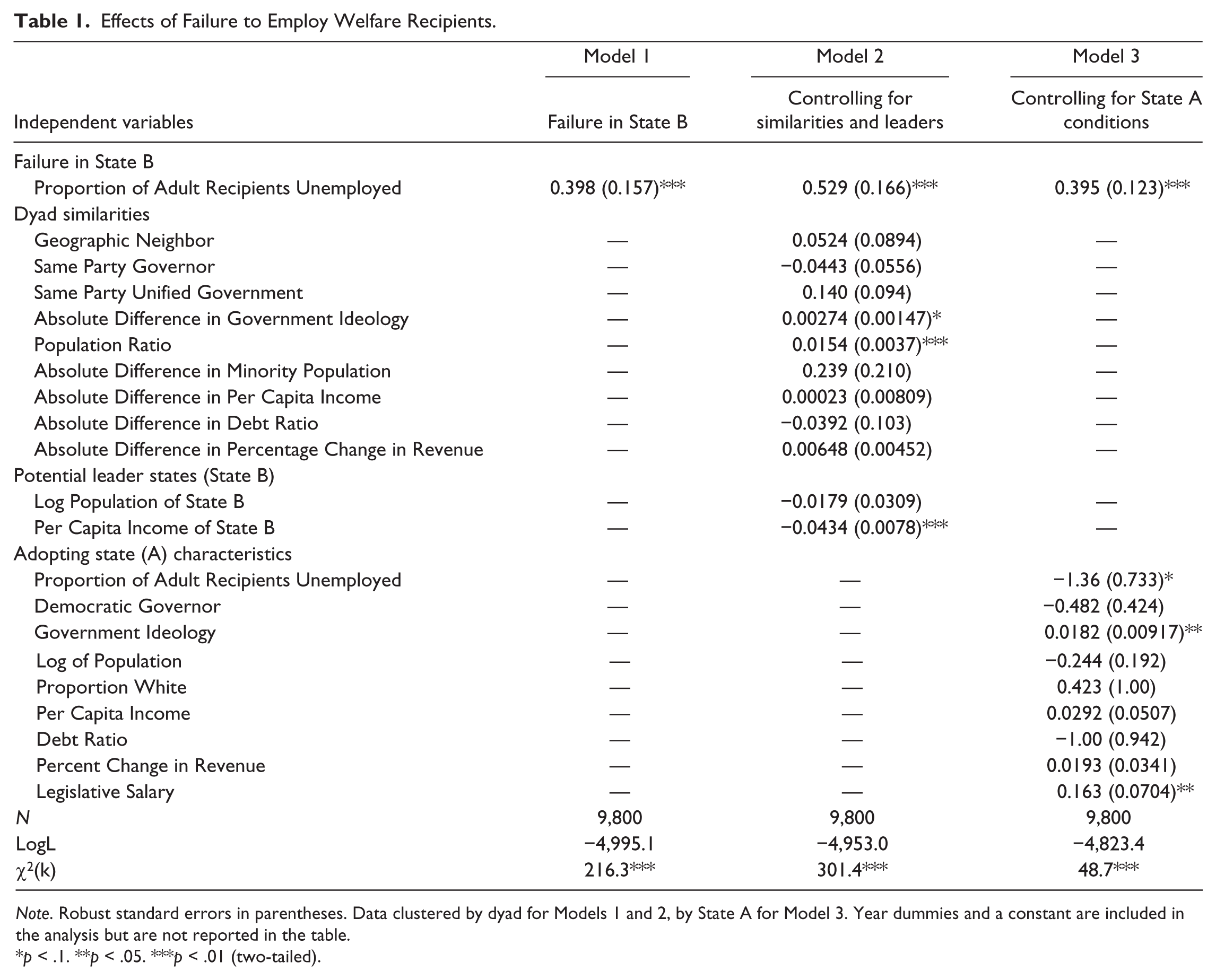
Note. Robust standard errors in parentheses. Data clustered by dyad for Models 1 and 2, by State A for Model 3. Year dummies and a constant are included in the analysis but are not reported in the table.
p < .1. **p < .05. ***p < .01 (two-tailed).
Model 2 adds control variables for similarities across the pairs of states and for conditions in State B. The results indicate that, controlling for these other considerations that could influence policy abandonment, failure to employ recipients in State B is still strongly associated with abandoning the failing policy in State A. Most of the control variables have coefficients taking signs in line with expectations. Six of the nine dyadic similarities variables show greater abandonment of policies shared by dissimilar states, and two of those coefficients attain statistical significance. Specifically, states that diverge from one another in government ideology and in population are more likely to abandon one another’s policies, according to Model 2.
Such findings provide modest support for the view that different states naturally diverge in their policies over time. Below, in interacting these differences with evidence of policy failures, we see that part of this divergence is due to state policymakers dismissing the experiments of very different states as irrelevant examples. Also from Model 2, consistent with the idea of leaders and laggards among policy innovators, State A is more likely to abandon the policies of State B when State B has a lower per capita income. This is in line with the idea that states tend to emulate other wealthier states (and in so doing move away from the poorer states).
Model 3 instead offers controls for the circumstances in State A that might lead to policy abandonment. Once again, with these controls, strong support remains for the abandonment of the failing welfare-to-work policies of State B. In addition, Model 3 displays support for the idea that more liberal governments are more active in abandoning old policies in favor of new ones. More professional state legislatures, with high legislator salaries, are also more likely to take an active role in modifying their policies to a greater extent over time.
Perhaps surprisingly, the coefficient on Proportion of Adult Recipients Unemployed in State A is negative and significant. This indicates that, when State A has a failing policy—one that does not successfully employ a large percentage of its own adult welfare recipients—it is less likely to modify its policy, all else equal. This is an unexpected finding, as one would imagine that states would learn from their own failures as well as from those in other states to determine whether or not to abandon their present policies. Yet, there may be a variety of reasons for such a finding. First, perhaps other political pressures influence whether policy modification is desirable, and then evidence from other states’ experiments weigh into which policies should be kept and which should be abandoned. Second, perhaps failure in one’s own state is assessed relative to expectations, which are modified by one’s own previous success with the policy (and which therefore are not adequately captured by the operationalization used here). 20 Third, perhaps incumbent politicians, prone to emphasizing their own successes and downplaying their failures, are unlikely to change their policies in the face of their own failings. This would be consistent with perceptions of political successes or failures playing a strong role alongside policy failures in driving policy change. Fourth, perhaps such entrenchment is more likely for more ideologically extreme policymakers than for moderates. Some of these possible explanations are given an initial assessment below.
Model 4 in Table 2 combines all these control variables into a single model to show the effect of failure to employ current adult welfare recipients on policy abandonment upon accounting for other determinants of abandonment. The evidence in support of the Abandoning Policy Failures Hypothesis remains as strong as ever. Consistent with earlier models, each percent increase in adult recipient unemployment in State B is associated with about half a percent rise in the odds of State A abandoning policies found in State B. The rest of the control variables remain in line with those discussed above, with the exception of the dyad similarities measures, all of which lose their statistical significance in Model 4. Although their signs are still largely in line with the idea that dissimilar states are diverging in their policies, this effect is weak at best. Perhaps it is best described as policymakers in State A being indifferent to their similarities with State B in determining whether to keep or abandon shared policies. Instead, they base this decision on evidence of the policy’s failure in other states.
Different Failure Criteria.
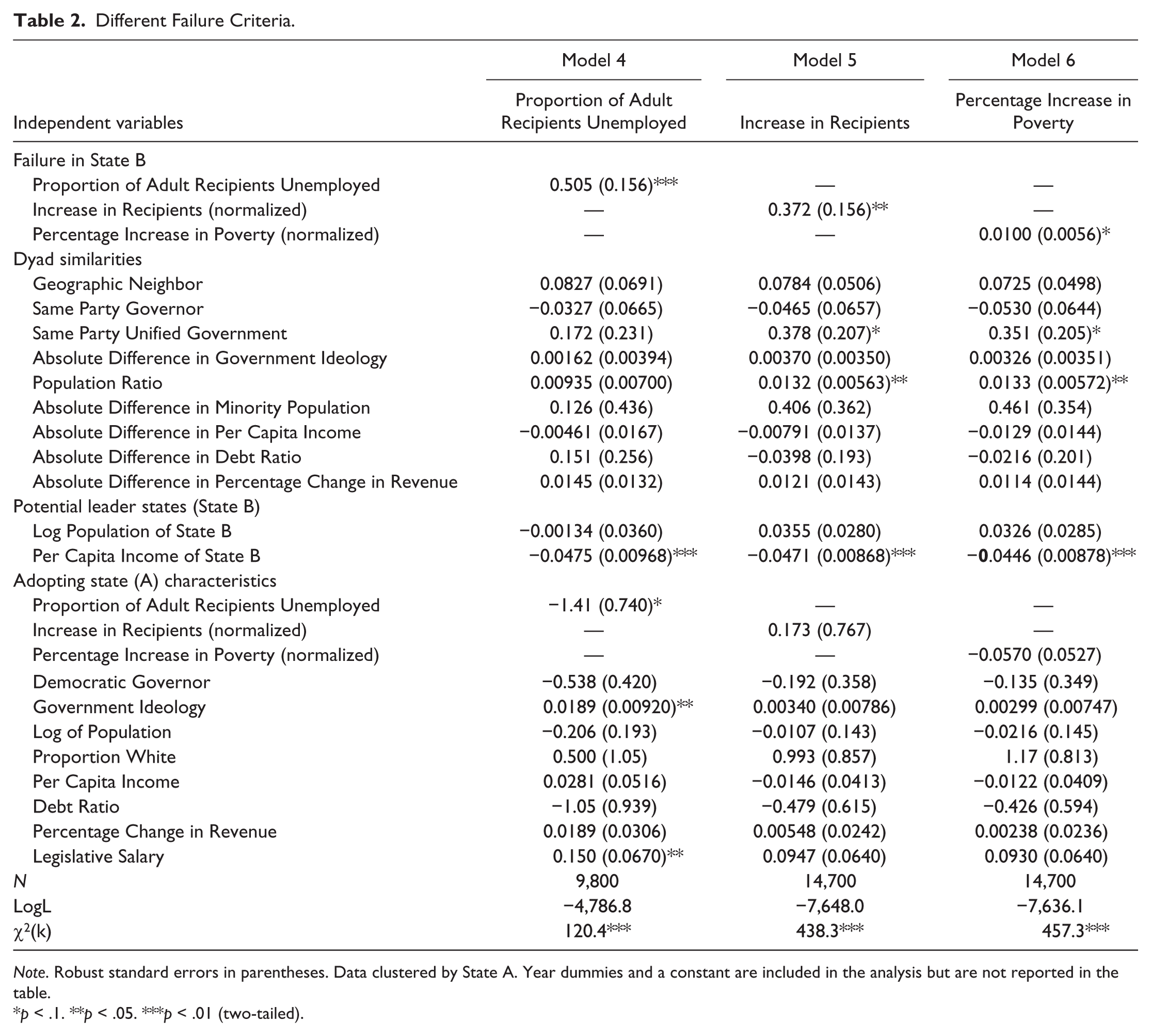
Note. Robust standard errors in parentheses. Data clustered by State A. Year dummies and a constant are included in the analysis but are not reported in the table.
p < .1. **p < .05. ***p < .01 (two-tailed).
Models 5 and 6 look at alternative measures of policy failure than the employment of current adult recipients. In particular, in Model 5, changes in the welfare rolls are used to determine whether the policies are failing or not. Although one might also like to assess whether the welfare rolls declined due to successful transition into the workforce or due to less desirable circumstances, here, the broad aggregate measure of rising or declining welfare rolls is used as a rough indicator of policy failure. Consistent with the Abandoning Policy Failures Hypothesis, a larger than average increase in welfare rolls in State B (or a smaller than average decrease) is linked with State A’s abandonment of the policies it shares with State B. Specifically, each additional percent increase in the welfare rolls in State B is associated with a 0.37% increase in the odds of State A abandoning their shared policies. 21 Put another way, compared with the average state, when State B is one-standard-deviation less effective in moving recipients off of the welfare rolls, its policies have just over a 5% greater likelihood of being abandoned by each other state paired with State B in the analysis. Once again, most of the control variables for dyadic similarities, State B characteristics, and State A conditions do not attain statistical significance.
Model 6 extends the analysis to evidence of policy failure in addressing poverty in the states. Again in line with previous analyses, this model is consistent with learning from policy failures in other states. The coefficient on Percentage Increase in Poverty in State B is positive and statistically significant at p = .076 (two-tailed test). Each percent increase in poverty in State B, relative to the average state, is associated with a 1% rise in the odds of State A abandoning policies shared by the two states. 22 Because there is not a large variance in poverty rate fluctuations across the states over this time period (standard deviation for this variable is 2.07, as detailed in the appendix), the overall effect of poverty changes on policy abandonment may be small. Nevertheless, it is important to note that evidence of rising or falling poverty rates in other states seems to be taken into consideration when policymakers are determining which of their current welfare policies to abandon or modify. Taken as a whole, the evidence from the three models in Table 2 is very supportive of the idea that states learn from the policies failures of others in line with the Abandoning Policy Failures Hypothesis.
The curious result from Model 3 noted above is once again evident in the models in Table 2. Specifically, although failures in State B are associated with the abandonment of policies shared by States A and B, there is little evidence of the abandonment of policies found to fail in State A itself. In fact, both Proportion of Adult Recipients Unemployed in State A and Percentage Increase in Poverty in State A have negative coefficients, although only the former is statistically significant. In the introduction and in the discussion of this initial result above, it was speculated that policymakers do not wish to admit to their own failings. A policy abandonment would vividly display such a failure to voters (e.g., Durr 2001; Geva-May 2004). However, new politicians would not be subject to such concerns and should be able to change their government’s failing policies. 23 One way to preliminarily explore this idea is to subdivide the data set based on whether the party in control of the state legislature or the governorship changed.
Doing so shows some support for this idea that politicians do not wish to admit their own failures. For example, replicating Model 4 only among governments with no party turnover, the Proportion of Adult Recipients Unemployed in State A variable takes on a coefficient of −1.91. However, where any of the House, Senate, or governor changed parties, this failure variable takes a coefficient of 0.795, consistent with abandoning the state’s own failed policies (and perhaps gaining a partisan advantage in so doing). 24
The Conditional Nature of Learning and Policy Abandonment
Having established the baseline result that states abandon policies shared with failing states, it is crucial to take the next steps in determining whether such learning is a more nuanced process than one in which all states learn approximately the same lessons from all other states. One might imagine that some states are better positioned to learn from others and that not all other states’ experiments should be of equal value. As suggested by the Learning from Similar States Hypothesis, we might suspect that state policymakers are more likely to rely on the experiments of other states that share similar characteristics. And as raised in the Learning by Professional Legislatures Hypothesis, state legislators who treat their legislative position as their main job may dedicate more time and effort to determining which policies will successfully transfer to their states.
To test these hypotheses, I interact key control variables with the main independent variables accounting for policy failure in State B. In all such models, I continue to control for all the variables detailed in Table 2. Specifically, as reported in Table 3, I first build on the earlier models by interacting each of the failure variables with Absolute Difference in Government Ideology. If learning from the failures of other states is conditional on the two states being ideologically similar, we would expect a larger effect of high recipient unemployment, rising welfare rolls, and increasing poverty in State B on policy abandonment in State A for similar states than for dissimilar states. In terms of coefficients, we would therefore anticipate a positive coefficient on the main failure effects and a negative coefficient on the interactions—as the learning effect would fade for more dissimilar states.
Learning from Ideologically Similar States.
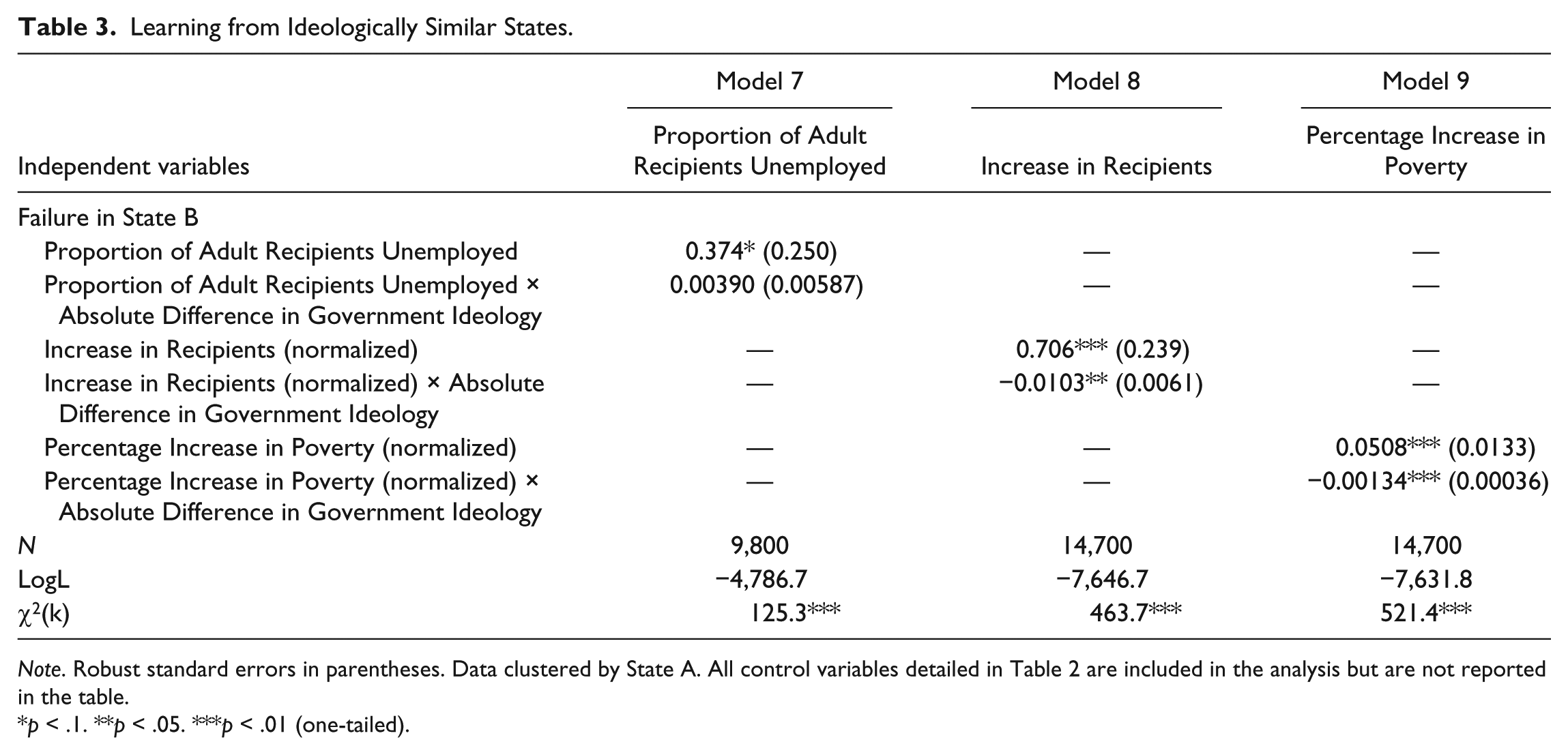
Note. Robust standard errors in parentheses. Data clustered by State A. All control variables detailed in Table 2 are included in the analysis but are not reported in the table.
p < .1. **p < .05. ***p < .01 (one-tailed).
This pattern is precisely what we find in Models 8 and 9 of Table 3, although no such conditional effect is found in Model 7. According to the results of Model 8, for a dyad in which State A and State B share the exact same political ideology, reduction in welfare rolls has a very strong effect. The size and significance of the effect is illustrated in Figure 1, relying on the “grinter” command developed by Fred Boehmke. For such states, shown on the left of the figure, each percent rise in welfare recipients in State B is associated with just over a 0.7% increase in the odds of State A abandoning their shared policies. This is about twice the effect of learning from the failures of a randomly paired state, as demonstrated in Model 5 (or in Figure 1) upon noting that the average Absolute Difference in Government Ideology between any two dyadic partners is 30.3. Moreover, where the two states are very dissimilar—where their governmental ideology scores are about 70 points apart on the 100-point ideology scale—evidence of failure to reduce the welfare rolls in State B has no effect on the decision of State A to abandon or keep their shared policies. 25 This means that conservative states learn substantially from the effects on welfare rolls of policies in other conservative states, learn only somewhat from lessons of moderate states, and learn not at all from experiments in liberal states. Likewise, liberal states learn most significantly from experiments in ideologically similar states.
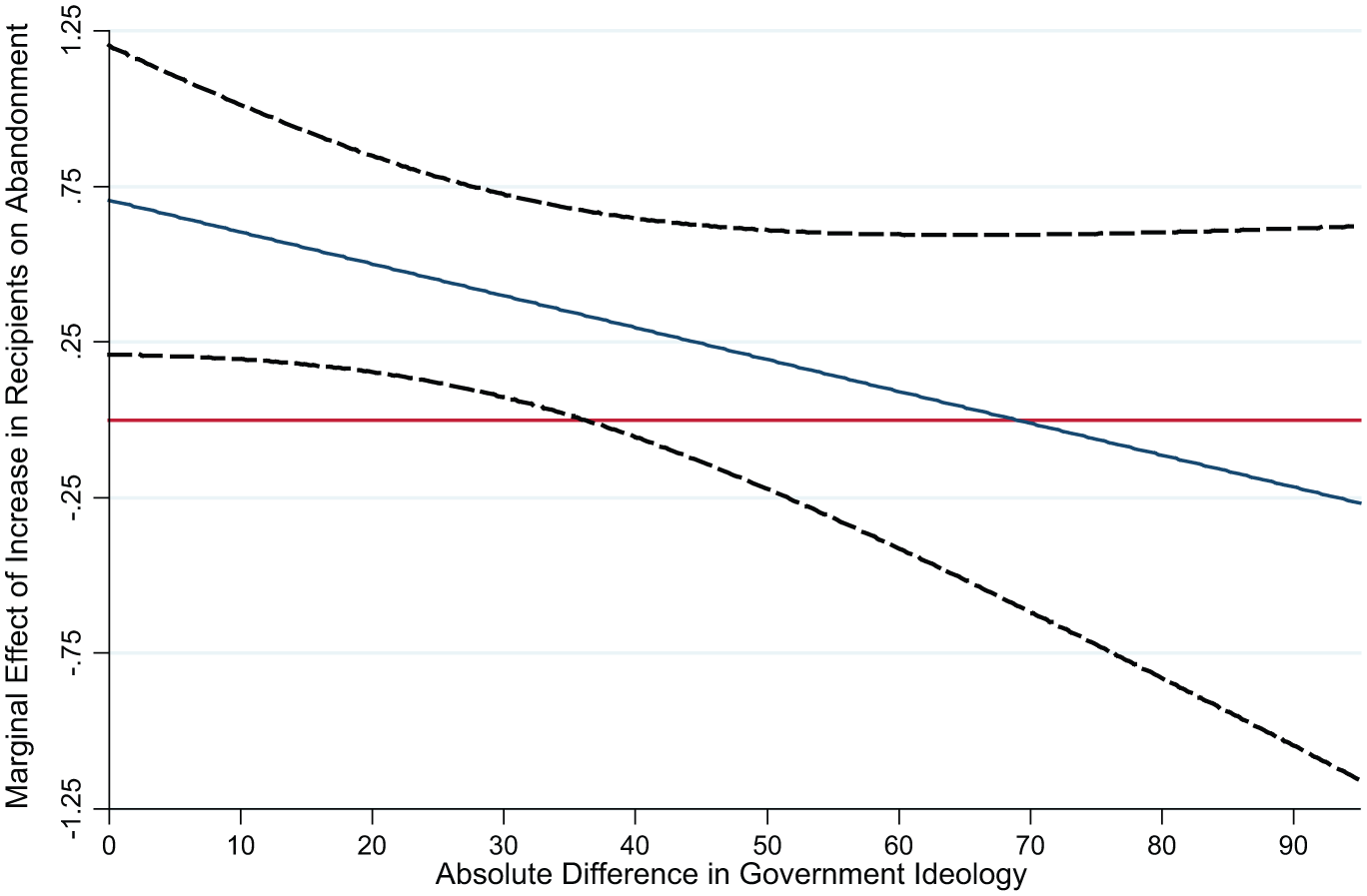
Learning from similar states (recipient increases).
Model 9 also demonstrates strong support for the Learning from Similar States Hypothesis, this time for evidence of failure with respect to poverty rates. The results of this model are illustrated in Figure 2. When the dyadic pair shares the same governmental ideology, evidence of failure in reducing poverty is very potent in bringing about policy abandonment. For such states, each 1% rise in poverty in State B increases the odds of abandonment by State A by 5%. This is five times the learning effect for an average pair of states. And, as illustrated in the figure, for states that differ in ideology by about 30 to 60 points, the learning from failures effect becomes indistinguishable from to zero. These findings are all consistent with the Learning from Similar States Hypothesis. 26 Somewhat surprisingly, the right part of the figure shows ideologically dissimilar states abandoning one another’s successes rather than their failures. This anomaly, however, is likely to be a product of the fact that there are very few highly dissimilar states, that those that do exist (such as the Utah–Massachusetts dyad) tend to only share policies that nearly all states share, and thus that they are unlikely to abandon those few shared policies. Failures in these paired states might well be treated as evidence that State B’s already dissimilar policies are the cause of their failures, thus reaffirming that State A is on the right path and does not need a policy change at all.

Learning from similar states (poverty increases).
Finally, to test the Learning by Professional Legislatures Hypothesis, I interact the three failure measures with Legislative Salary in State A. Theoretically, the more professional states (which provide higher legislative salaries) are better able to learn from and act upon the policy failures in other states. If this is the case, we would expect a positive coefficient on the interactive variable. As seen in Table 4, such a positive interaction does emerge in a statistically significant manner in Models 10 and 11, for evidence of failure to employ welfare recipients and failure to reduce welfare rolls (although there is no evidence that professionalism affects learning from the poverty effects of welfare policies). 27 Now the coefficients on the noninteracted failure variables indicate the learning effects in the 10 states with the least professional legislatures, those that provide no legislative salary other than per diem reimbursements.
Learning by Professional Legislatures.
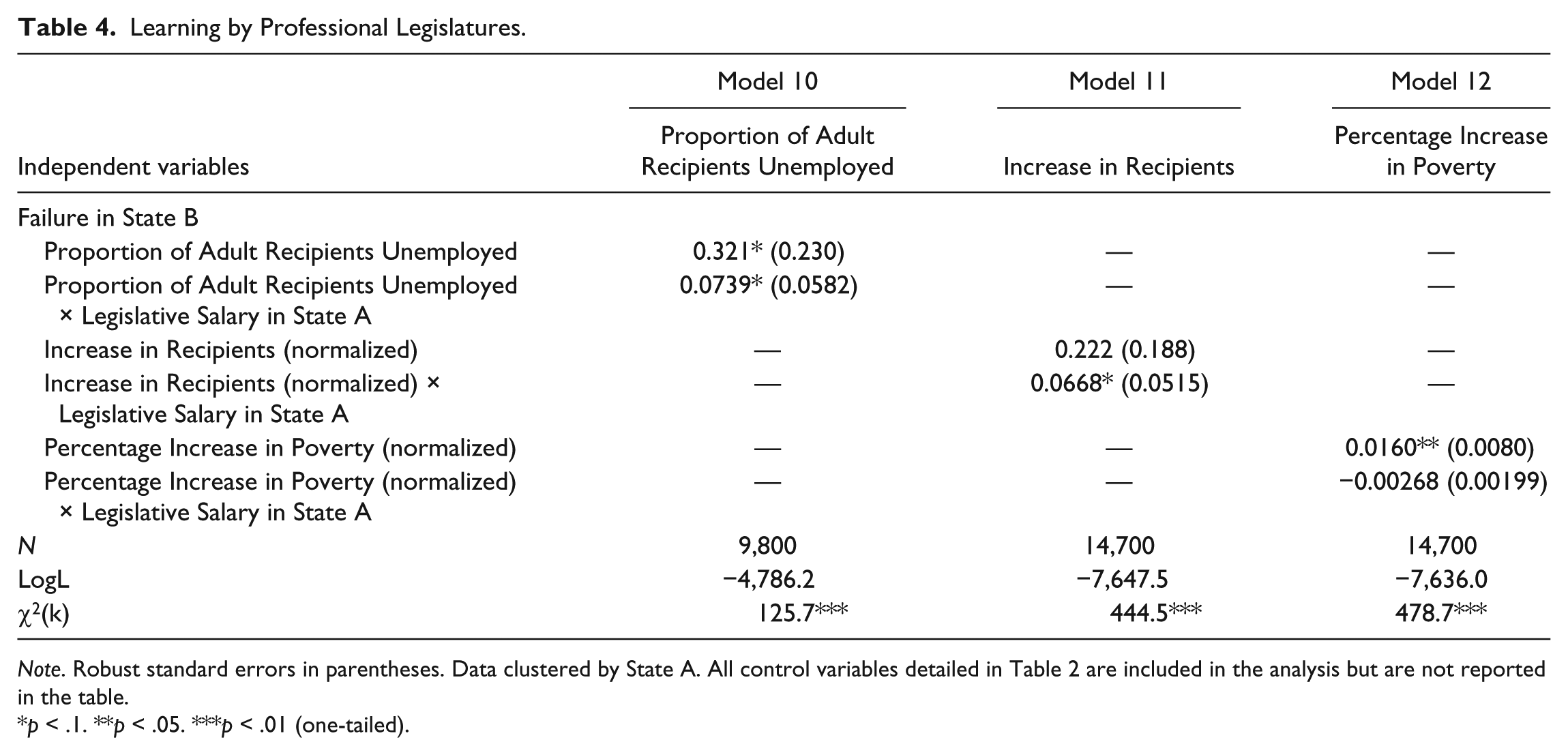
Note. Robust standard errors in parentheses. Data clustered by State A. All control variables detailed in Table 2 are included in the analysis but are not reported in the table.
p < .1. **p < .05. ***p < .01 (one-tailed).
The findings from Models 10 and 11 are illustrated in Figures 3 and 4, respectively. As can be seen in Figure 3, states with legislative salaries below $10,000 (shown on the far left of the figure below a value of 1) are not statistically likely to learn from failing employment policies for TANF recipients in State B, using a 95% confidence interval. In contrast, the average state’s legislative salary is just above $20,000. For such a state, each percent increase in welfare recipient unemployment rates in State B is linked with a 0.5% rise in the odds of abandonment of the failing policies by State A. Finally, the most professional state legislatures pay their legislators upward of $100,000 per year. Such a State A, illustrated on the right of Figure 3, increases its odds of abandoning State B’s policies by over 1.0% for each percent rise in unemployment among State B’s welfare recipients.
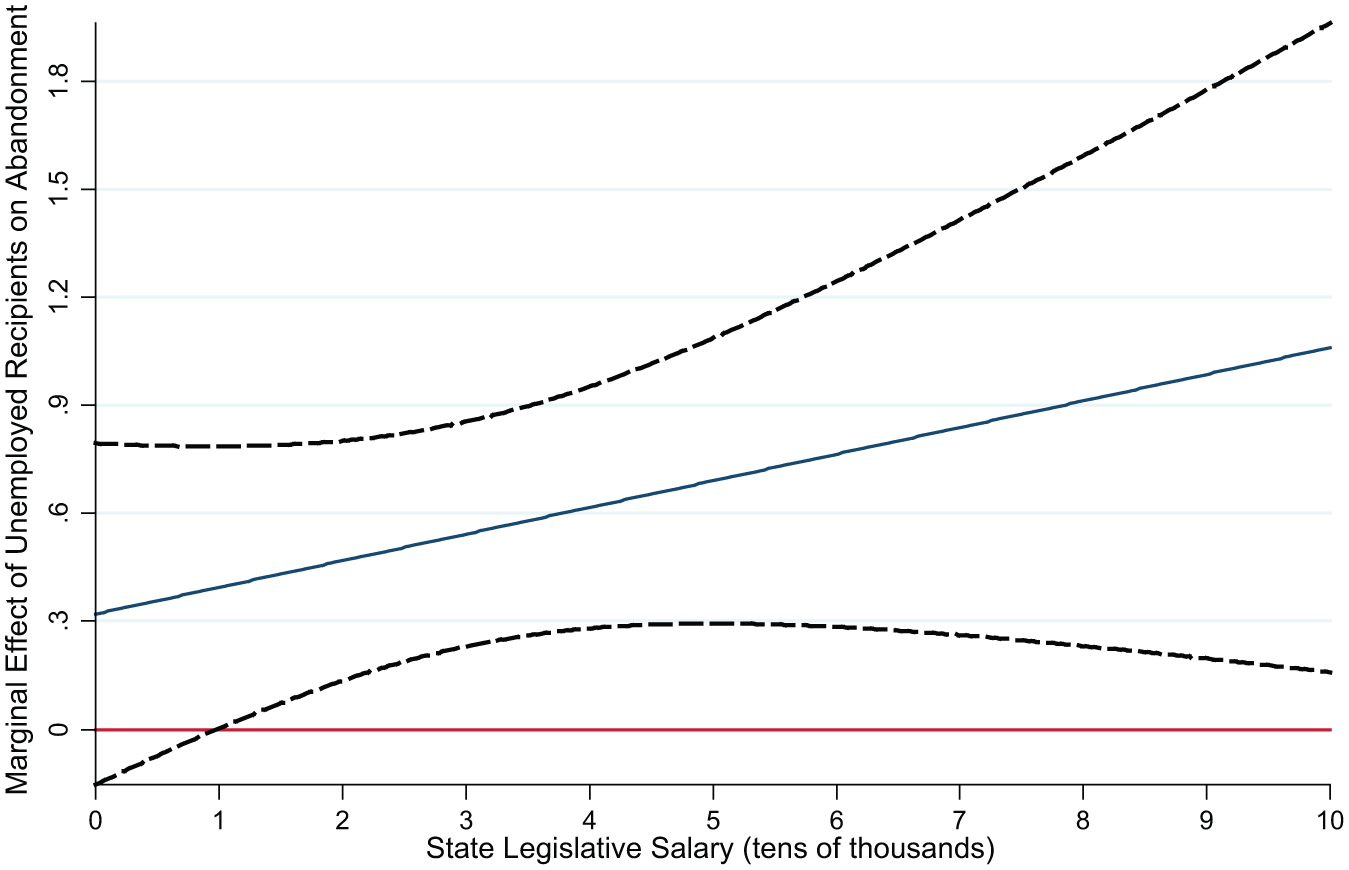
Learning by professional legislatures (unemployed recipients).

Learning by professional legislatures (recipient increases).
Such a pattern of enhanced learning by more professional state legislatures is also evident in Model 11 for overall welfare rolls. Consider a State B that is 1% less successful in reducing its welfare rolls than the average state. This failing state’s policies are more likely to be abandoned by other states. But the degree to which such learning and abandonment takes place is closely linked to the legislative professionalism of the learning states (State A). For the least professional states, below $15,000 as illustrated on Figure 4, this failing state’s policies have no statistically significant larger likelihood of being abandoned than those of the average State B. For moderately professional states (salary of $20,000), however, the odds of abandonment are nearly half a percent higher. And for the most highly professional states (salary of $100,000), the odds of abandonment are almost a full percent more likely given each percent increase in State B’s welfare rolls. An even stronger effect of professionalism is found by interacting Percentage Increase in Recipients with Squire’s aggregate professionalism measure (not shown here due to space considerations). 28 These results strongly support the Learning by Professional Legislatures Hypothesis.
Implications and Conclusion
Scholars studying policy diffusion offer a variety of reasons why policies of one government might spread elsewhere. Perhaps the economic effects of some policies might spill across jurisdictions, pressuring surrounding governments to adopt similar policies. Perhaps less-developed countries or states wish to appear more modern by imitating the policies adopted by leaders. Or perhaps adoptions are based on learning about policy effects of the experiments of other governments. To the extent that learning is driving policy diffusion, it is important to realize that the success or failure of the current policy being abandoned may be as influential in policy decisions as is evidence of the success or failure of the new policy to be adopted.
This article establishes that evidence of policy failure by one government is closely linked to policy abandonment by others. Specifically, in the area of welfare reform in the United States, states with policies that failed to employ welfare recipients, failed to reduce overall welfare rolls, and failed to reduce poverty (relative to others’ successes) were more likely to have their shared policies abandoned by other states. However, such abandonment of failing policies was not uniform across all states. Policy failures in ideologically similar states were particularly influential in determining which aspects of a state’s welfare policies should be altered and abandoned. And states with more professional legislatures were better able to learn from (and act upon) the experiences of others. These results indicate that at least part of the policy diffusion process is based on learning about what policies do not work elsewhere.
The conditional nature of these learning effects could be due to states finding the most relevant experiments from which to learn. However, such conditional effects also point to the likelihood of inefficient learning. Less professional state legislatures learn very little from others’ experiments, and the experiences of ideologically distant states are broadly dismissed. Such limitations on learning may point to a prescriptive role for central governments, interest groups, and political entrepreneurs who could disseminate information about effective policies found elsewhere. Of course, given their own political agendas, such intermediary involvement may result in additional biases in the learning process, ripe for exploration in future studies.
Although these findings are important to scholarship on policy diffusion within both the comparative politics and American state politics literatures, they also have significant implications for American federalism and for the politics of welfare reform in the United States. As in discussions about many policy areas, the arguments surrounding policy devolution in the 1996 welfare reforms were frequently couched in terms of state experimentation. By giving states broader control over the details of their welfare policies, national policymakers would be allowing states to act as policy laboratories. Proponents of devolution argued that states would try a variety of policies, would abandon the failures, and would adopt successful policies found elsewhere. This article suggests that such a story rings true. Policies that did not meet expectations for moving welfare recipients off of welfare, into the workforce, and out of poverty were more likely to be abandoned. The lessons from the multitude of experiments flowed across the states, especially to the most professional legislatures and to ideologically similar states. The result was the abandonment of policies that failed in addition to the adoption of policies that worked elsewhere.
Footnotes
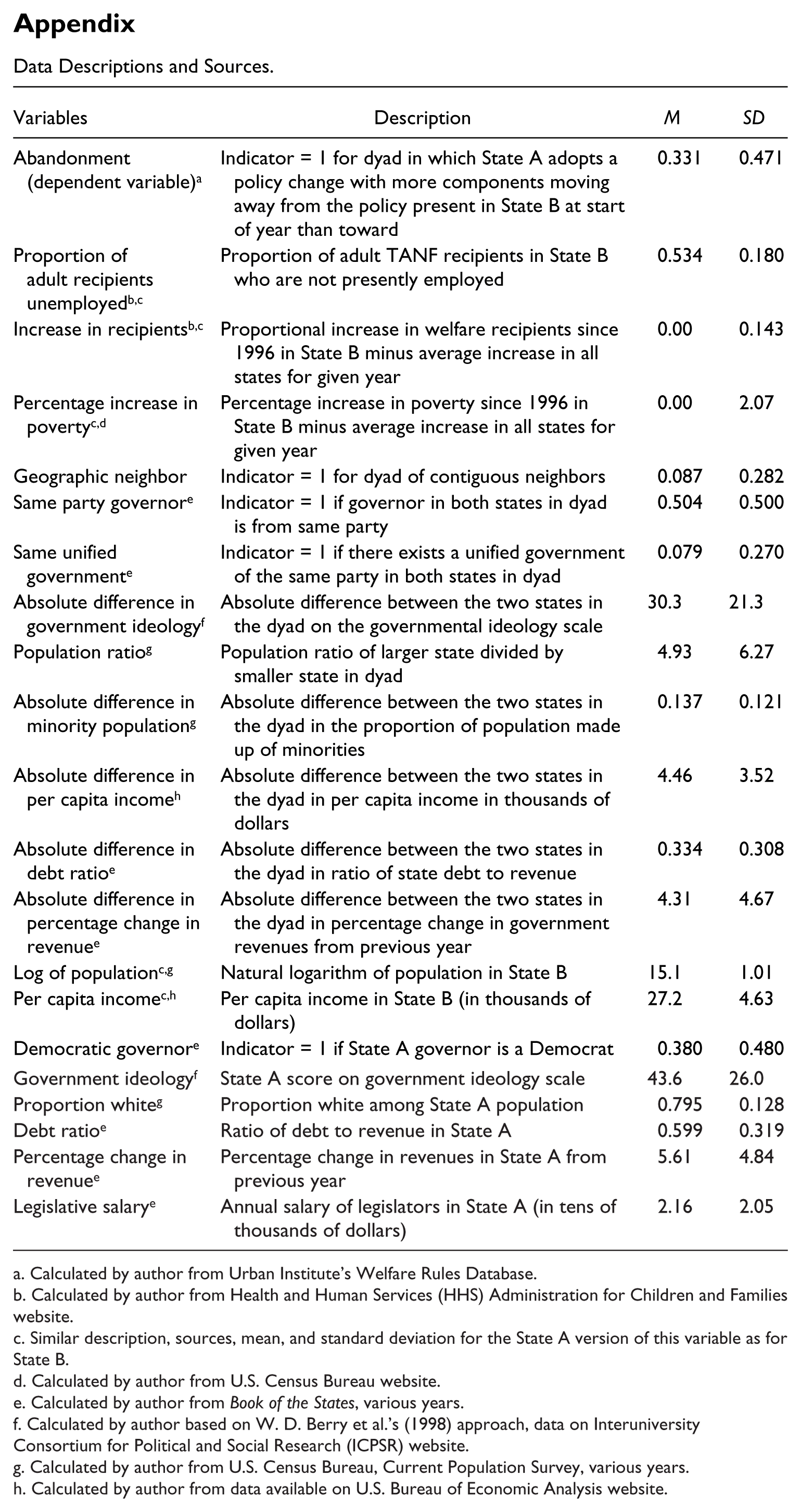
Appendix
Data Descriptions and Sources.
| Variables | Description | M | SD |
|---|---|---|---|
| Abandonment (dependent variable) a | Indicator = 1 for dyad in which State A adopts a policy change with more components moving away from the policy present in State B at start of year than toward | 0.331 | 0.471 |
| Proportion of adult recipients unemployedb,c | Proportion of adult TANF recipients in State B who are not presently employed | 0.534 | 0.180 |
| Increase in recipientsb,c | Proportional increase in welfare recipients since 1996 in State B minus average increase in all states for given year | 0.00 | 0.143 |
| Percentage increase in povertyc,d | Percentage increase in poverty since 1996 in State B minus average increase in all states for given year | 0.00 | 2.07 |
| Geographic neighbor | Indicator = 1 for dyad of contiguous neighbors | 0.087 | 0.282 |
| Same party governor e | Indicator = 1 if governor in both states in dyad is from same party | 0.504 | 0.500 |
| Same unified government e | Indicator = 1 if there exists a unified government of the same party in both states in dyad | 0.079 | 0.270 |
| Absolute difference in government ideology f | Absolute difference between the two states in the dyad on the governmental ideology scale | 30.3 | 21.3 |
| Population ratio g | Population ratio of larger state divided by smaller state in dyad | 4.93 | 6.27 |
| Absolute difference in minority population g | Absolute difference between the two states in the dyad in the proportion of population made up of minorities | 0.137 | 0.121 |
| Absolute difference in per capita income h | Absolute difference between the two states in the dyad in per capita income in thousands of dollars | 4.46 | 3.52 |
| Absolute difference in debt ratio e | Absolute difference between the two states in the dyad in ratio of state debt to revenue | 0.334 | 0.308 |
| Absolute difference in percentage change in revenue e | Absolute difference between the two states in the dyad in percentage change in government revenues from previous year | 4.31 | 4.67 |
| Log of populationc,g | Natural logarithm of population in State B | 15.1 | 1.01 |
| Per capita incomec,h | Per capita income in State B (in thousands of dollars) | 27.2 | 4.63 |
| Democratic governor e | Indicator = 1 if State A governor is a Democrat | 0.380 | 0.480 |
| Government ideology f | State A score on government ideology scale | 43.6 | 26.0 |
| Proportion white g | Proportion white among State A population | 0.795 | 0.128 |
| Debt ratio e | Ratio of debt to revenue in State A | 0.599 | 0.319 |
| Percentage change in revenue e | Percentage change in revenues in State A from previous year | 5.61 | 4.84 |
| Legislative salary e | Annual salary of legislators in State A (in tens of thousands of dollars) | 2.16 | 2.05 |
Calculated by author from Urban Institute’s Welfare Rules Database.
Calculated by author from Health and Human Services (HHS) Administration for Children and Families website.
Similar description, sources, mean, and standard deviation for the State A version of this variable as for State B.
Calculated by author from U.S. Census Bureau website.
Calculated by author from Book of the States, various years.
Calculated by author based on W. D. Berry et al.’s (1998) approach, data on Interuniversity Consortium for Political and Social Research (ICPSR) website.
Calculated by author from U.S. Census Bureau, Current Population Survey, various years.
Calculated by author from data available on U.S. Bureau of Economic Analysis website.
Acknowledgements
Thanks to Jonathan Bendor, John Cogan, Jonathan Euchner, Fabrizio Gilardi, Kathleen Hale, Covadonga Meseguer, William Minozzi, Michael Mintrom, Karen Mossberger, Mark Rom, Chuck Shipan, Marjorie Thompson, editors and anonymous reviewers, and seminar and conference participants at the American Political Science Association conference, the Association for Public Policy Analysis and Management conference, the Midwest Political Science Association conference, the European Consortium for Political Research (ECPR) workshops, the Southern Political Science Association conference, Columbia University, University of Edinburgh, Georgetown University, University of Kentucky, University of South Carolina, and Washington University in St. Louis for helpful comments on earlier versions of this piece and its related work, and to Michael Cohen for valuable research assistance. Thanks to the Hoover Institution at Stanford University for their generous support during the formulation of this article.
Author’s Note
Please send questions and comments to
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.