
Abstract
To address the issue that traditional Nonlinear Model Predictive Control (NMPC), which employs a fixed prediction horizon, struggles to simultaneously satisfy the requirements for both tracking accuracy and real-time performance, this study proposes a Fuzzy control-based Adaptive prediction horizon kinematic NMPC (FANMPC) approach. This method utilizes road curvature and vehicle speed as fuzzy inputs to adjust the prediction horizon in real-time. Based on the vehicle kinematics model, a nonlinear optimization problem is formulated and solved using the Sequential Quadratic Programming (SQP) algorithm. Additionally, control increment constraints and dynamic stability constraints are incorporated to ensure smooth control. Simulation experiments demonstrate that, under both low-speed (30 km/h) and high-speed (70 km/h) double lane change conditions, compared to fixed predictive horizon Model Predictive Control (MPC), the proposed method enhances lateral tracking accuracy by 42.4% and 77.91%, respectively. Furthermore, when compared to fixed prediction horizon NMPC, it improves lateral tracking accuracy by 23.4% and 8.01%, respectively, while reducing the average solution time by 11.72% and 16.04%, respectively. The proposed method significantly enhances the real-time performance of the algorithm while maintaining tracking accuracy, offering an optimized solution for trajectory tracking control in autonomous driving that balances both accuracy and efficiency.
Keywords
Introduction
Trajectory tracking control, as a core technology of autonomous driving systems, directly dictates the vehicle’s precision in following a reference path and its overall driving safety. Existing methods primarily include Pure Pursuit, 1 Proportional-Integral-Derivative(PID) controllers, 2 Linear Quadratic Regulators(LQR), 3 and Model Predictive Controllers(MPC). 4 As an extension of MPC, Nonlinear Model Predictive Control (NMPC) has become a research focus in the field of intelligent vehicle lateral control due to its inherent capability to explicitly handle system nonlinearities, multiple constraints, and multi-objective optimization requirements.5–7 Nevertheless, conventional NMPC methods typically utilize a fixed prediction horizon for optimization, which inadequately addresses the dynamic trade-off between tracking accuracy and real-time performance under complex driving conditions. Specifically, while an extended prediction horizon can enhance control performance, it substantially increases computational load, thereby hindering real-time execution. Conversely, a shortened prediction horizon reduces computation time but results in insufficient look-ahead, leading to a marked deterioration in tracking accuracy, particularly on curved roads.8–10
Existing research primarily addresses this challenge from two perspectives: model simplification and algorithm acceleration. In terms of model simplification, Linear Time-Varying Model Predictive Control (LTV-MPC) 11 employs a linear time-varying model to approximate the nonlinear dynamics, thereby reducing per-step computational complexity. Nevertheless, linearization errors can amplify tracking deviations under extreme driving conditions. Reference 12 proposes a strategy that switches between kinematic and dynamic models adaptively based on vehicle speed; however, the switching threshold is difficult to define precisely, which may induce control oscillations. Regarding algorithm acceleration, Reference 13 utilizes neural networks to approximate the MPC control law offline, achieving millisecond-level response times. Yet, the generalization capability of such networks is constrained by the distribution of training data, leading to insufficient reliability in extreme scenarios. Reference 14 adopts an event-triggered mechanism to reduce the frequency of optimization solves, but this approach compromises closed-loop stability guarantees. Notably, none of these methods directly address the adaptive optimization of the prediction horizon itself, thus failing to fundamentally resolve the inherent conflict between predictive capability and computational efficiency.
Recent literature has made significant strides in enhancing the robustness of MPC against parameter uncertainties and unmodeled dynamics without relying on precise analytical models. For instance, robust performance can be achieved by employing model-free predictive control strategies combined with adaptive resonant controllers, 15 integrating sliding mode observers to reconstruct local prediction models and avoid the introduction of nominal system parameters, 16 or designing disturbance observers to estimate parameter uncertainties as a whole for feedforward compensation. 17 While these approaches highly effectively handle internal parameter mismatches and external disturbances, they generally still operate under a fixed prediction horizon. Consequently, they do not resolve the computational bottlenecks associated with the varying prediction horizons required for complex path geometries.
In contrast to utilizing model-free techniques solely for disturbance rejection or model reconstruction, the primary advantage of the proposed scheme lies in utilizing Fuzzy control theory 18 to achieve dynamic resource allocation. Leveraging its independence from precise mathematical models and its robust nonlinear mapping capabilities, the proposed method uses fuzzy logic for the adaptive adjustment of the prediction horizon. By taking road curvature and vehicle speed as inputs, the system dynamically adapts the prediction horizon to the current driving state. Crucially, under high-speed and large-curvature cornering conditions that typically cause severe computational delays in traditional NMPC, the fuzzy controller actively shortens the prediction horizon to guarantee real-time execution and prevent control lag. This fundamentally resolves the trade-off between real-time algorithm performance and control precision that fixed-horizon robust MPCs struggle to balance. Reference 19 proposed an adaptive strategy that adjusts the prediction horizon using a polynomial curve-fitting method based on real-time vehicle speed. However, it failed to account for the varying impacts of road geometric features on preview requirements. This limitation leads to a mismatch between the prediction horizon and road complexity under curved road conditions. Reference 20 incorporated curvature information to modulate control weights, thereby improving steering response, yet it maintained a fixed prediction horizon, thus not fully exploiting the potential of parameter adaptation and still exhibiting lagged responses on road segments with abrupt curvature changes. Furthermore, existing NMPC research based on kinematic models often implicitly assumes low-speed operating conditions, neglecting the fundamental constraint imposed by tire cornering characteristics on model validity at high speeds.21–23 The kinematic model assumes that tire slip angles are negligible and that the vehicle’s velocity direction is always aligned with its heading. While this assumption holds approximately at low speeds, at high speeds (typically >15 m/s), significant lateral tire forces induce increased slip angles, causing a pronounced discrepancy between the trajectory predicted by the kinematic model and the actual vehicle response, leading to a sharp deterioration in control performance.
In response to the limitations of traditional NMPC, this paper proposes a trajectory tracking method based on kinematic NMPC with a fuzzy adaptive prediction horizon (FANMPC). Road curvature and vehicle speed are used as inputs to a fuzzy inference system to adapt the prediction horizon in real time. The method is optimized for typical passenger vehicle driving under normal conditions. A nonlinear optimization problem is formulated from the vehicle kinematics and efficiently solved via Sequential Quadratic Programming (SQP), 24 with control increment and dynamic stability constraints to ensure smooth and safe operation. The main contributions are as follows:
A dual-input fuzzy inference system incorporating curvature and vehicle speed is established to achieve continuous adaptive adjustment of the prediction horizon according to operating conditions. By analyzing the coupled influence of road curvature and vehicle speed on look-ahead requirements, a fuzzy rule base is designed to shorten the prediction horizon during high-speed straight-line driving to reduce computational burden, and extend it during low-speed cornering to enhance tracking accuracy, thereby enabling optimal allocation of computational resources.
An NMPC optimization framework integrating control increment and stability constraints is developed, balancing tracking accuracy with real-time solution efficiency. Dynamic stability constraints based on the zero-slip-angle assumption are introduced to prevent high-speed instability, and a multi-objective cost function is constructed to balance path tracking and heading maintenance.
A quantitative performance evaluation methodology is established, employing RMS of lateral error, maximum lateral error, and average solution time as metrics to comprehensively assess tracking accuracy, transient deviation, and real-time performance. The performance of FANMPC is compared with fixed-horizon MPC and NMPC to validate the effectiveness of the proposed adaptive horizon strategy in tracking accuracy and solution efficiency.
Kinematic vehicle modeling
In the inertial coordinate system (X-O-Y), assuming planar vehicle motion with rigid body and suspension systems, and neglecting lateral tire forces and load transfer between the front and rear axles, a kinematic analysis is conducted centered at the rear axle. For a front-steering and rear-wheel-drive vehicle, it can be abstracted as a bicycle model, as illustrated in Figure 1.
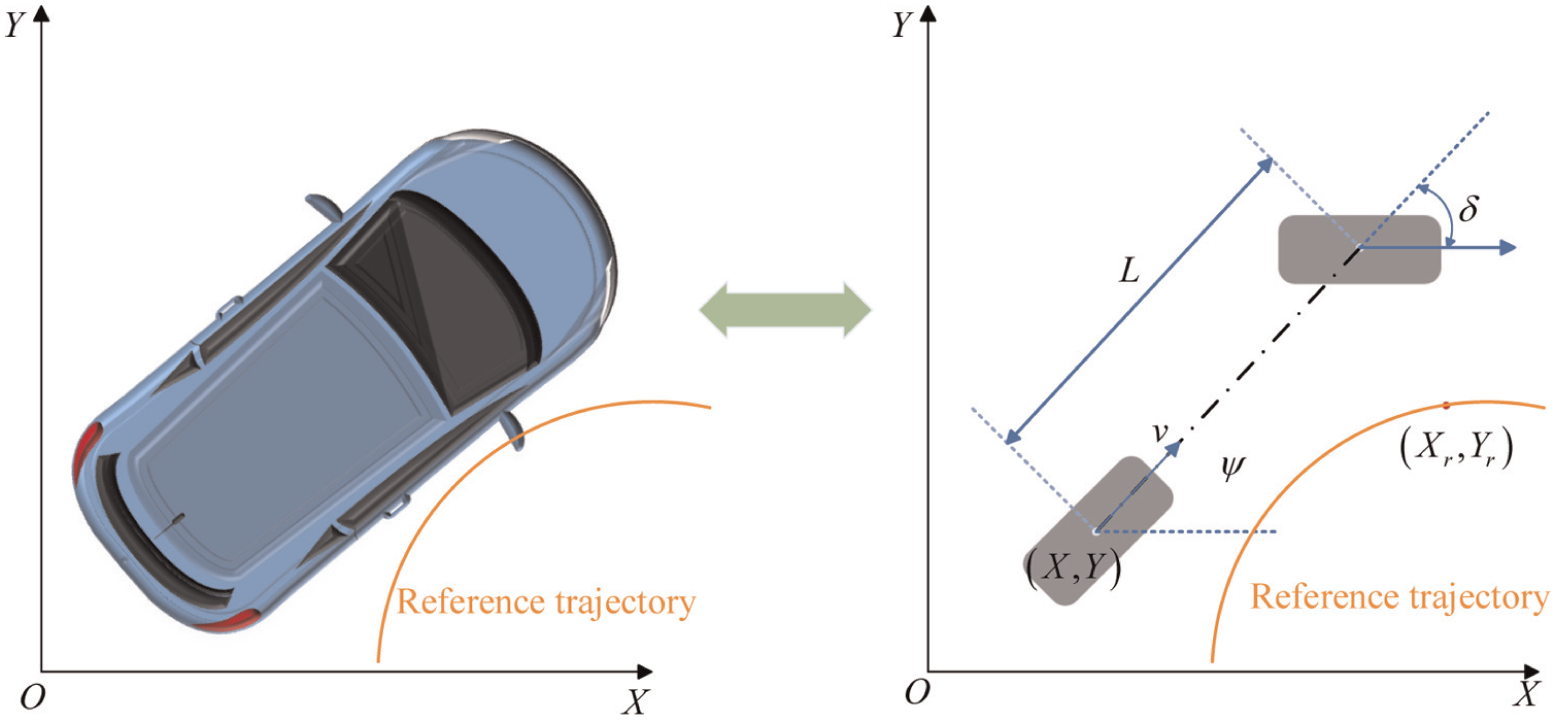
Kinematic bicycle model (rear-axle type).
The key parameters in Figure 1 are described in Table 1.
Description of key parameters.

By analyzing the vehicle motion state, the continuous-time vehicle model can be derived as follows:

Here, the state variables are

Define the reference trajectory state as

By differentiating the error vector and combining it with the kinematic model, the error dynamic equation can be obtained as:

Where the reference heading angular rate satisfies
Trajectory tracking control system design
Overall architecture
As illustrated in Figure 2, the FANMPC algorithm sequentially initiates with state acquisition and fuzzy-based dynamic horizon prediction, followed by a parallel formulation of the multi-objective cost function and system constraints (including actuator limits and zero-slip dynamic bounds), which are subsequently assembled and solved via the SQP optimization to output the optimal control sequence for vehicle state updates in each receding horizon cycle.

Algorithmic execution flowchart of the proposed FANMPC strategy.
As shown in Figure 3, the FANMPC closed-loop control framework comprises four coupled components: upper-level trajectory planning, fuzzy adaptive decision-making, nonlinear receding horizon optimization, and vehicle state feedback.

Overall architecture of the control system.
The system receives reference path geometry and desired states. A fuzzy inference module dynamically adjusts the prediction horizon using road curvature and vehicle speed, balancing computational efficiency and look-ahead performance. The NMPC kernel, based on a nonlinear kinematic error model, then predicts future states and, via the SQP algorithm, generates an optimal control sequence by minimizing a weighted cost of tracking error and control effort, subject to actuator limits, control increment constraints, and lateral stability constraints. The first control input is applied to the vehicle, and state feedback continuously corrects prediction deviations, forming a robust closed-loop path tracking system.
Design of NMPC controller
To facilitate optimization-based solution, the forward Euler method is employed to discretize the aforementioned continuous model. Let the sampling period be denoted as

Which expands to the following explicit form:

Within each control interval, the NMPC predicts the future trajectory of the system over the prediction horizon

Equation (7) presents the pseudocode representation of the fuzzy control scheme, where
Within each control interval, the controller is required to predict the system state over the future

When

Due to the physical travel limits of vehicle chassis actuators (such as the electronic throttle and steering motor), hard constraints must be imposed on the control input

In expanded form:

Additionally, for the introduced control increments, we also impose constraints on the control increments, it limits the rate of change of vehicle motion in the discrete domain, in the following form:

In expanded form:

In addition, to prevent the risk of sideslip or rollover during high-speed cornering, nonlinear constraints based on the vehicle dynamics envelope are introduced. According to vehicle dynamics principles, the lateral acceleration of the vehicle when cornering must satisfy the road adhesion limit:

Under the kinematic model, the lateral acceleration can be approximately expressed as:

Therefore, the maximum safe front wheel steering angle

Therefore, the following state-dependent constraint on the steering angle is derived from equation (16):

As the vehicle speed increases, the allowable steering angle is automatically reduced, thereby compelling the vehicle to maintain smaller steering amplitudes at high speeds and fundamentally avoiding the risk of instability.
The aforementioned constraint set is defined as
Fuzzy adaptive prediction time-domain design
Within the NMPC framework described above, the prediction horizon not only defines the controller’s look-ahead distance but also affects the computational load and solution efficiency of the SQP problem. Conventional NMPC often uses a fixed horizon, which can cause overshoot at high speeds or reduced real-time performance on low-speed, high-curvature roads. To address this, a fuzzy adaptive strategy is designed, coupling vehicle state with road geometry to dynamically adjust the horizon and achieve a balance between control performance and computational cost.
The core logic of this decision mechanism lies in establishing a nonlinear mapping from the perception parameter space to the control parameter space. In the fuzzification stage, the vehicle’s real-time longitudinal velocity and the road curvature of the current reference trajectory are selected as dual input variables.
The universe of discourse for vehicle speed is partitioned into six fuzzy subsets, denoted as [TS, VS, NS, MS, HS, LS], representing tiny, very low, normal, medium, high, and large speeds, respectively. These subsets characterize the intensity of vehicle motion. Considering the use of a kinematic vehicle model, which introduces deviations from actual nonlinear dynamics, the speed range is set to [0, 100]. To satisfy real-time control requirements, triangular membership functions are adopted. The specific partitioning is illustrated in Figure 4.

Vehicle speed membership function diagram.
The universe of discourse for curvature is partitioned based on the experimental hyperbolic roads, as referenced in, 27 where the hyperbolic reference trajectory model is given by equation (18).

Where

Based on the reference experimental trajectory curvature, the path curvature falls within 0.013/m. To provide a margin, the universe of discourse is designed as [0, 0.014]. Meanwhile, to avoid control oscillations caused by excessively fine partitioning, the curvature is divided into five fuzzy subsets, denoted as [TK, VK, MK, HK, LK], representing tiny curvature, very small curvature, medium curvature, high curvature, and large curvature, respectively. These subsets reflect the spatial constraints of the environment on steering control precision. The membership degree relationships are shown in Figure 6.

Curvature diagram of the double lane change maneuver.

Curvature membership function diagram.
Considering the real-time requirements of nonlinear model predictive control, the control horizon is fixed, while the prediction horizon is constrained within a defined range. Its universe of discourse is designed as [10, 40] and partitioned into six subsets, denoted as [TN, VN, NN, MN, HN, LN], representing tiny short, very short, normal, medium, high, and large prediction horizons, respectively. The membership degree relationships are shown in Figure 7.

Prediction horizon membership function diagram.
Based on the relationship among vehicle speed, curvature, and prediction horizon, a set of fuzzy control rules is designed, as shown in Table 2.
Fuzzy control rules.

To validate the feasibility of the designed rules, the output surface of the fuzzy control rules was generated, as shown in Figure 8. The output surface of the designed fuzzy control rules is relatively smooth, with no significant irregular shapes or obvious concavities, indicating that the designed fuzzy rules are applicable.

Fuzzy control output surface.
Parameter tuning strategy and principles
The proposed FANMPC framework relies on a multi-objective cost function (equation (9)) to balance tracking accuracy, control effort, and dynamic stability. While the prediction horizon (
State error weight matrix (
)
The matrix
Specifically, setting a dominant weight for the lateral error (
Control effort weight matrix (
)
The matrix
Control increment weight matrix (
)
The matrix
Following the above principles, the optimal weighting matrix for the simulation experiment is ultimately determined as follows:
State error weight matrix:
Control effort weight matrix:
Control increment weight matrix:
Simulation results
Under the condition of a vehicle speed of 30 km/h
To verify the performance of the proposed NMPC controller based on a fuzzy adaptive prediction horizon, a comparative analysis is conducted against a conventional kinematic fixed-horizon MPC controller and a fixed-horizon NMPC controller. In addition, the polynomial fitting-based adaptive prediction horizon method from reference 19 is integrated into the NMPC framework to replace the fuzzy control module, enabling an additional comparative analysis. The experiments are carried out using Matlab/Simulink2024b and Carsim 2019, with a C-class hatchback vehicle as the test platform. The specific parameters of the vehicle are shown in Table 3.
Vehicle specific parameters.

The experimental trajectory is generated in Matlab/Simulink using equation (18), and the same trajectory is configured in Carsim. A comparative analysis of the four controllers is conducted in terms of lateral control accuracy and real-time solution performance.
As can be seen from Figure 9(a), at a vehicle speed of 30 km/h, the FANMPC, traditional NMPC, MPC, and Reference 19 controllers all achieve effective trajectory tracking. However, slight differences in tracking accuracy are observed at curves. Figure 9(b) more clearly demonstrates that the control accuracy of the traditional NMPC controller is higher than that of the MPC controller, which benefits from the higher model accuracy of NMPC compared to MPC. However, due to the poor real-time performance of the traditional NMPC controller, control lag occurs. In contrast, the adaptive prediction horizon of FANMPC provides better real-time control performance, resulting in higher control accuracy than that of traditional NMPC. Moreover, in contrast to the method in reference, 19 the polynomial fitting-based adaptive prediction horizon is determined solely by vehicle speed. When the speed does not exceed 30 km/h, the prediction horizon is only 8, leading to an insufficient preview distance. As a result, its control performance is inferior to that of the other compared methods. Figure 9(c) and (d) show that FANMPC effectively achieves adaptive prediction horizon control while exhibiting lower solution time compared to traditional NMPC. Although the solution time is slower compared to the method in reference, 19 the solution accuracy is higher.

Comparison of performance indicators under the 30 km/h operating condition: (a) Comparison of tracking trajectories; (b) Comparison of lateral errors; (c) Prediction time domain comparison; (d) Comparison of solution time.
Under the condition of a vehicle speed of 70 km/h
The specific performance indicators of the controllers under the 70 km/h operating condition are shown in Figure 10.

Comparison of performance indicators under the 70 km/h operating condition: (a) Comparison of tracking trajectories; (b) Comparison of lateral errors; (c) Prediction time domain comparison; (d) Comparison of solution time.
As can be observed from Figure 10(a), at a vehicle speed of 70 km/h, all four controllers are capable of effectively tracking the trajectory, although tracking performance deteriorates at curves. Combined with the data in Figure 10(b), FANMPC, traditional NMPC and Reference 19 achieve lateral errors superior to that of MPC, with the most pronounced differences occurring at curved sections. In terms of real-time performance, Figure 10(c) and (d) demonstrate that the adaptive prediction horizon of FANMPC is effective, and its solution time is also superior to that of traditional NMPC.
Specifically, Figure 10(d) presents a comparison of solution times among FANMPC, traditional NMPC, and the method proposed in Reference 19 under the operating condition of 70 km/h. The horizontal axis represents the number of runtime nodes, while the vertical axis denotes the solution time in seconds. As illustrated by the scattered data points, the solution time of traditional NMPC (blue dots) remains consistently high throughout the entire trajectory, fluctuating primarily between 20 and 35 ms. In contrast, FANMPC (red dots) mostly remain below the blue dots. This also indicates that as the fuzzy adaptive mechanism reduces the prediction horizon at high speeds (Figure 10(c)), the computational burden of the SQP algorithm is correspondingly alleviated. Consistent with the findings at 30 km/h, FANMPC exhibits longer solution times but higher solution accuracy compared to the method in Reference. 19
Quantitative analysis
For the two operating conditions mentioned above, a quantitative analysis of the data was conducted. For lateral error, the root mean square (RMS) is used as the metric to analyze the overall fluctuation level of vehicle deviation from the trajectory. To evaluate the computational burden imposed by the multi-step prediction scheme, the “solution time” is adopted as a core performance indicator. This metric represents the exact time consumed by the solver to complete the rolling optimization over the prediction horizon at each control step. The average solution time is utilized to assess the overall computational load and real-time feasibility of each controller. The specific numerical results are presented in Table 4.
Lateral error and solution time data for each controller.

According to the comparative data in Table 4, FANMPC demonstrates the best overall performance under both low-speed and high-speed conditions, significantly outperforming traditional NMPC, MPC and Reference. 19 At low speed (30 km/h), FANMPC achieves the highest accuracy with a lateral error RMS of only 0.0144 m and a maximum error of merely 0.0372 m, while maintaining an average solution time of 11.75 ms—faster than traditional NMPC (13.31 ms). Although MPC and Reference 19 exhibits an extremely short solution time (2.16 and 3.65 ms), its errors are substantially larger than those of FANMPC, indicating insufficient control quality. At high speed (70 km/h), FANMPC maintains excellent tracking capability, with a lateral error RMS of 0.0826 m and a maximum error of 0.3091 m—comparable to traditional NMPC (0.0898 m / 0.3084 m)—while achieving a solution time of only 16.18 ms, approximately 16% shorter than traditional NMPC (19.27 ms), significantly enhancing real-time performance. In contrast, MPC exhibits severe error degradation at high speeds (RMS reaching 0.3740 m, maximum error approaching 1 m), failing completely to meet the requirements of high-precision trajectory tracking. In summary, FANMPC significantly reduces computational burden while maintaining high accuracy. Across varying speed conditions, its precision-efficiency balance outperforms both traditional NMPC and MPC. Furthermore, it achieves superior lateral accuracy compared to the adaptive method in. 19
Conclusions
This paper proposes an NMPC controller based on a fuzzy adaptive prediction horizon, which is capable of simultaneously satisfying the requirements of tracking accuracy and real-time performance.
Based on road curvature and vehicle speed, a set of fuzzy rules for an adaptive prediction horizon applicable to NMPC is designed, and a three-dimensional fuzzy output surface is generated to validate the rules. Experimental results demonstrate that the proposed method effectively achieves adaptive adjustment of the prediction horizon within the NMPC framework.
Co-simulation results using Matlab/Simulink and Carsim indicate that, under low-speed (30 km/h) and high-speed (70 km/h) conditions, compared to fixed-horizon MPC, the proposed FANMPC improves lateral tracking accuracy (in terms of RMS error) by 42.4% and 77.91%, respectively; compared to fixed-horizon NMPC, it improves lateral tracking accuracy by 23.4% and 8.01%, while reducing average solution time by 11.72% and 16.04%, respectively.
Although the proposed fuzzy adaptive prediction horizon NMPC controller offers certain advantages, it still has some limitations: First, the applicable upper limit of the kinematic model is not sufficiently high, making it difficult to fully meet vehicle control requirements at high speeds. Second, the fuzzy control rules rely on expert experience, which may still lead to unexpected situations under special circumstances. Future work will focus on further optimizations to address these issues.
Footnotes
Handling Editor: Xiaodong Sun
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Natural Science Research Project of Anhui Educational Committee (2025AHGXZK31286, 2025AHGXZK40244, 2024AH051456), The Scientific Research Project of Fuyang Normal University (rcxm202303, 2021KYQD0008), Fuyang Normal University Open Project of Anhui Intelligent Computing and Information Innovation Application Engineering Research Center (FYKFKT24051).
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.