
Abstract
Accurate preload design is essential for the stiffness, dynamic stability, and driving reliability of precision opto-mechanical systems. This study investigates a cam-driven zoom mechanism with miniature ball bearings and spring preloading devices, and establishes a preload–stiffness–torque margin coupled model. Based on Hertzian contact theory, the relationships among preload, contact stiffness, and motor torque margin are derived. Sensitivity analysis is performed to identify the dominant parameters, and a multi-objective optimization is conducted to balance stiffness enhancement and torque safety margin, yielding an optimal preload of 29 N. Finite element modal analyses under different preload conditions show that both stiffness and natural frequency exhibit saturation beyond 29 N. The second-order natural frequency follows a sixth-root dependence on preload, consistent with the analytical prediction. For deep-space applications, the effects of thermally induced differential expansion on preload drift and contact clearance variation are further analyzed. Margin verification demonstrates that the mechanism remains stable and reliable within the controlled operational temperature range. The proposed framework provides theoretical support and engineering guidance for preload design in precision opto-mechanical systems for deep-space applications.
Introduction
In recent years, the continuous advancement of deep-space exploration technology has imposed higher requirements on imaging payloads. Conventional fixed-focus optical cameras can no longer satisfy diverse mission demands, which has stimulated the development of zoom cameras for deep-space missions. In early aerospace missions, zoom mechanisms were often replaced by fixed-focus configurations due to technological risks and limited engineering feasibility. However, the Mastcam-Z camera onboard NASA’s Perseverance rover successfully demonstrated on-orbit zoom imaging, confirming the engineering feasibility and scientific value of zoom mechanisms in extraterrestrial environments.1,2 Consequently, developing zoom cameras capable of high performance, high stability, and high reliability under the harsh conditions of deep-space missions has become both a practical necessity and an urgent research topic. This study focuses on a cam-driven zoom mechanism, in which the cam is supported by miniature ball bearings and preloaded using a spring device. The preload applied to the bearing serves as a critical structural parameter, directly affecting the system’s contact stiffness, vibration characteristics, and driving stability.3,4 Improper preload selection may cause mechanical backlash, unstable motion, or degraded imaging performance, whereas optimal preload design ensures structural rigidity and smooth actuation. Therefore, understanding the coupling relationship between preload, contact stiffness, and dynamic response is essential for the structural optimization of opto-mechanical systems used in deep-space zoom cameras.
In recent years, extensive research has been devoted to understanding the mechanical influence of preload on bearing-supported structures and to developing optimization methods for preload design, forming a multilevel framework integrating theoretical modeling, numerical simulation, and experimental validation. From the perspective of structural performance, preload is generally recognized as the dominant parameter governing the stiffness and dynamic characteristics of bearing assemblies and supporting systems. Wang et al., in International Journal of Mechanical Sciences, established a nonlinear contact model to investigate the variations of contact angle, contact force, and equivalent stiffness under multiple operating conditions. Their results indicated that a moderate axial preload significantly enhances system stiffness and vibration stability, whereas excessive preload increases friction torque and thermal rise. 5 Xu et al. further incorporated assembly errors and tilting effects into the preload model and found that preload and assembly state jointly determine the system’s modal characteristics and load distribution, thereby confirming the strong coupling between preload and structural dynamics. 6 Tian et al. experimentally measured the dynamic support stiffness of preloaded bearing systems and reported that the dynamic stiffness increases with preload up to a certain threshold, beyond which the improvement tends to saturate. 7 Lin et al., in Machines, proposed a multi-objective optimization framework coupling thermal, mechanical, and vibration responses, and determined the optimal preload scheme for a spindle system using the Pareto frontier and knee-point method. 8 These studies collectively demonstrate that preload not only governs the stiffness and modal response of bearing systems but also couples closely with frictional and thermal behaviors. However, most existing works primarily address the bearing or spindle system in isolation, and few have considered preload optimization in the context of integrated opto-mechanical systems, where preload affects both mechanical stability and optical performance. Although considerable progress has been made in understanding the mechanisms and optimization of bearing preload, most existing studies remain confined to the bearing unit or mechanical subsystem level. These works mainly aim to enhance load-carrying capacity, extend service life, or improve lubrication characteristics, yet they seldom address system-level performance optimization from an opto-mechanical perspective. For opto-mechanical systems operating in complex environments, stability requirements are more stringent, and a comprehensive analytical framework that connects preload, contact stiffness, and dynamic performance is still lacking. In particular, for applications such as deep-space exploration, in addition to mechanical performance, the influence of thermally induced preload drift and contact clearance variation on mechanism stability must also be considered. Therefore, it is essential to develop an integrated preload–stiffness–dynamics analytical framework based on Hertzian contact theory, together with margin verification under thermal conditions, so as to balance structural stiffness, driving torque margin, and system reliability. In this context, the present study focuses on a cam-based zoom mechanism used in opto-mechanical systems. A detailed investigation is conducted on the influence of preload on structural performance and the determination of its optimal value, while the thermal adaptability of preload and clearance within the controlled operational temperature range is further analyzed, aiming to bridge the theoretical and engineering gap in preload design for opto-mechanical structures.
To address the aforementioned issues, this study investigates a cam-driven zoom mechanism equipped with a preloading device, and develops a preload–contact stiffness model based on Hertzian contact theory together with a motor torque margin model characterizing the driving stability of the system. A sensitivity analysis is performed to identify the key parameters influencing structural performance, followed by a multi-objective optimization to determine the optimal preload that balances stiffness enhancement and torque safety margin. On this basis, finite element modal analyses, fitted results, and analytical predictions are combined to validate the theoretical model and assess the engineering applicability of the proposed structural design. In addition, for deep-space applications, the effects of differential thermal expansion on preload drift and contact clearance variation within the controlled operational temperature range are analyzed, and the thermal adaptability and operational reliability of the mechanism are further evaluated through corresponding margin verification.
Mechanical configuration of the cam-driven zoom system
The zoom camera employs a cam transmission combined with a cylindrical guiding mechanism, as shown in Figure 1. The cam barrel is connected to the main optical tube through miniature ball bearings mounted at both ends. One end adopts a three-point contact configuration, ensuring the stability of the driving torque transmitted from the motor. The other end forms a four-point contact between the bearing retainer ring and the steel balls, which effectively constrains the axial and radial degrees of freedom of the cam barrel. A preloading spring assembly is embedded in blind holes located behind the bearing raceway. 1 Each blind hole has a precisely machined depth and is radially distributed around the bearing seat. By adjusting the number of installed springs, the preload applied to the cam through the bearing–raceway interface can be finely tuned, thereby enabling controllable stiffness and contact characteristics.9,10

Model of the zoom camera and schematic of the spring preload assembly.
In order to ensure reliable operation of the zoom mechanism in the space environment, special attention must be given to environmental factors that may affect the structural performance. In vacuum conditions, cold welding between contacting surfaces made of identical materials can occur, potentially leading to motion blockage or torque fluctuation. Moreover, under extreme temperature variations, the mismatch in coefficients of thermal expansion (CTE) among components may cause structural deformation or clearance variation, thus degrading motion accuracy and long-term stability. To mitigate these effects, a material optimization strategy was implemented during the design stage. Based on a comprehensive investigation of the mechanical and thermal properties of different metals, aluminum alloy was selected for the cam barrel due to its low density and good thermal conductivity; stainless steel was used for the miniature ball bearings to ensure wear resistance and preload stability; aluminum–silicon carbide (Al–SiC) composite was chosen for the main optical tube to achieve high stiffness and excellent thermal dimensional stability; and titanium alloy was employed for the moving lens barrel owing to its superior strength-to-weight ratio and thermal compatibility.
Theoretical model of preload–contact stiffness
Hertzian contact theory
As shown in Figure 2, the miniature ball bearings transmit mechanical loads between the cam barrel and the main optical tube. The contact state between the balls and raceways is therefore crucial for analyzing the dynamic characteristics of this interface. Several classical theories have been developed to describe contact mechanics behavior, including the Hertzian Contact Theory, the Greenwood–Williamson (G–W) Theory.11,12 and the Williams–Mansfield (W–M) Theory. 13 Each model differs in its assumptions and applicable conditions. The Hertzian theory assumes smooth surfaces, purely elastic deformation, and small contact areas relative to the radii of curvature. The G–W model introduces surface asperity distributions to account for micro-scale roughness effects, while the W–M theory further extends the analysis to plastic deformation regimes. In this study, the contact between the rolling element and the raceway is treated as a sphere–plane point contact. The contacting bodies can be locally approximated as quadratic surfaces, and the contact area is much smaller than the characteristic dimensions of the bodies, corresponding to a typical Hertzian point-contact problem. Since the bearing contact interfaces are precision-ground and lubricated and the load-induced deformation remains within the elastic limit, the assumptions of small deformation and linear elasticity required by Hertzian contact theory are satisfied. Accordingly, Hertzian contact theory is employed to model the mechanical behavior of the contact interface. 14

Force-transmission path of the miniature ball-bearing assembly in the cam-driven zoom mechanism.
As shown in Figure 3, when two elastic bodies (denoted as body I and body II) are brought into contact without external load, the contact occurs theoretically at a single point. When a normal load
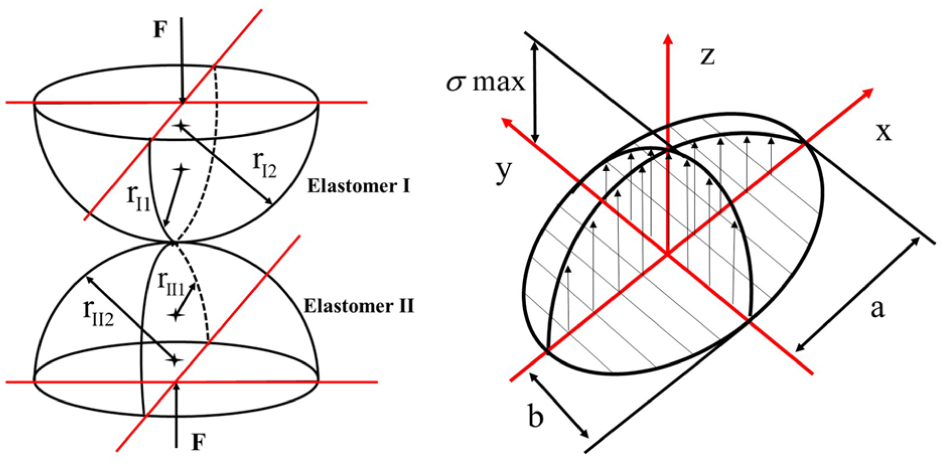
Hertzian contact and stress distribution within the contact region.
For general elastic contact problems, the load–deformation relationship is governed by an integral equation of the contact pressure distribution, whose analytical solution exists only for specific geometries. When the contacting bodies can be locally approximated as quadratic surfaces, the contact region becomes elliptical, corresponding to a typical Hertzian elliptical point-contact problem. Under this condition, the relationship between the normal load and contact deformation can be expressed analytically.
The elastic bodies I and II undergo elastic deformation under the applied load

where

according to the point contact schematic shown in Figure 3,
Differentiating

Equation (3) demonstrates that within the elastic deformation range,
Axial contact stiffness
Under an axial load, the axial contact stiffness of the miniature bearing
As shown in Figure 4, considering that the contact stiffnesses on both sides of the ball are different and behave in a series relationship, the equivalent stiffness of a single ball

Substituting equation (3) into equation (4) yields

Next, considering the contact angle


Hertzian contact and stress distribution within the contact region.
Substituting equation (5) into equation (6) gives:

According to Hooke’s law, the relationship between

Equation (8) indicates that axial contact stiffness
Radial contact stiffness
The radial contact stiffness of a miniature ball bearing
As shown in Figure 5, when the bearing is subjected only to a radial preload after assembly, the loads borne by the rolling elements are non-uniform—only the balls and raceways within approximately half of the circumference are in contact and undergo deformation.Therefore, the external load equals the sum of the radial forces acting on approximately half of the balls, yielding equation (9):

where

Force analysis diagram of the radial contact stiffness of the miniature ball bearing
The relationship between the load

where
Substituting it into equation (1) gives the relationship between the total radial load F on the miniature ball bearing and the radial load on a single ball

According to Hooke’s law:

and substituting equations (3) and (12) into equation (11) yields the relationship between the radial contact stiffness of the miniature ball bearing

Equation (13) shows that
Theoretical model of preload–motor torque margin
During the zooming process, the cam groove is in contact with the guiding pin to transmit the driving force. Under the constraint of the straight groove on the main optical tube, the rotational motion of the cam is converted into the linear translation of the moving lens barrel. The magnitude of the preload F significantly affects the friction torque generated during cam rotation, thereby altering the output torque required from the motor. Therefore, it is necessary to analyze the motor output torque characteristics under different preload conditions.
When analyzing the contact interface between the cam groove and the guiding pin, the cam is unfolded along the radial direction, as shown in Figure 6. Here,

Force analysis diagram of the contact interface between the cam groove and the guiding pin.
By analyzing the forces acting on the cam, it can be determined that, to generate the tangential rotational force
(i) The rotational inertia torque of the cam

where
(ii) The pressure component torque

where
(iii) The friction torque caused by the guiding pin

(iv) The bearing friction torque of the cam

where
Thus, the required driving torque

Finally, the motor margin is evaluated. With the selected motor torque parameter

Thus, the quantitative relationship between the motor torque margin
Equation (20) indicates that
Sensitivity analysis and multi-objective optimization design
Analysis of the preload mechanism
The previous two sections establish the relationships between the preload

Functional relationships between preload, contact stiffness, and motor torque margin.
Figure 7 shows that
Sensitivity analysis
Since the preload
The relative sensitivities of

where the boundary of
The calculation results show that the relative sensitivity of
Multi-objective optimization design
Based on the sensitivity analysis, the preload

where

By substituting equations (8), (13), and (28) into equation (23), the optimal preload
Multi-objective optimization structural design parameters.

Effect of deep-space thermal environment on preload and contact clearance
The preload value of 29 N obtained from equation (22) corresponds to the baseline optimal preload under the nominal operating temperature of +22°C For deep-space applications, although the external thermal environment may vary over a wide range, opto-mechanical cameras are typically maintained within a controlled operational temperature range through thermal insulation and active thermal control. The operating temperature range of this system is −20°C to +40°C. Therefore, in this study the thermal effect is treated as an engineering constraint for margin verification rather than being directly incorporated into the multi-objective optimization model.
Within the controlled operational temperature range, differential thermal expansion between materials may lead to variations in the preload force, which can be expressed as:

where
For the four-point contact side, temperature-induced variations in the raceway clearance can be partially compensated by the spring preload structure, resulting mainly in a shift of the preload magnitude and axial contact stiffness. The expression is as follows:

Where:
Summary of temperature difference, spring working length variation, and preload under high and low temperatures.

The calculation results indicate that within the controlled operational temperature range of −20°C to +40°C, the variation of preload remains relatively small compared with the nominal preload and still lies within the allowable design interval (4 N, 98 N). Therefore, the stiffness requirement, motor torque margin and axial positioning function can still be satisfied.
For the three-point contact side, which functions as the axial sliding support, temperature variation mainly affects the radial clearance of the mechanism. To avoid excessive looseness at high temperature or potential jamming at low temperature, sufficient structural compliance is ensured by reserving appropriate radial clearance tolerances and controlling the ball filling ratio. The thermal clearance variation can be expressed as:

and the following conditions must be satisfied:

These results demonstrate that within the controlled operational temperature range, both the preload and the clearance variation remain within acceptable limits, ensuring stable stiffness and reliable motion of the mechanism. Consequently, the obtained preload of 29 N can be regarded as the baseline design value under nominal operating conditions, while its applicability in deep-space missions is ensured through thermal margin verification.
Simulation verification and discussion of results
To verify the accuracy of the established preload–stiffness theoretical model, six evenly distributed preload values within the range of (4 N, 98 N) were selected. Modal analyses were performed under different preload conditions, and the finite element results were compared with the analytical predictions to validate the consistency between the preload–stiffness model and the modal characteristics of the mechanism.
Finite element preprocessing
The three-dimensional model was established using modeling software, with minor geometric features such as threaded holes and fillets simplified, as their influence on the finite element analysis results is negligible. The finite element model of the zoom camera and the coordinate directions are shown in Figure 8. The overall structure was meshed using a combination of hexahedral and tetrahedral elements. For the contact regions between the guiding pin and adjacent components, local mesh refinement was applied due to their small size and the higher accuracy required for local contact analysis. The final model consists of a total of 909,252 nodes and 496,558 elements.
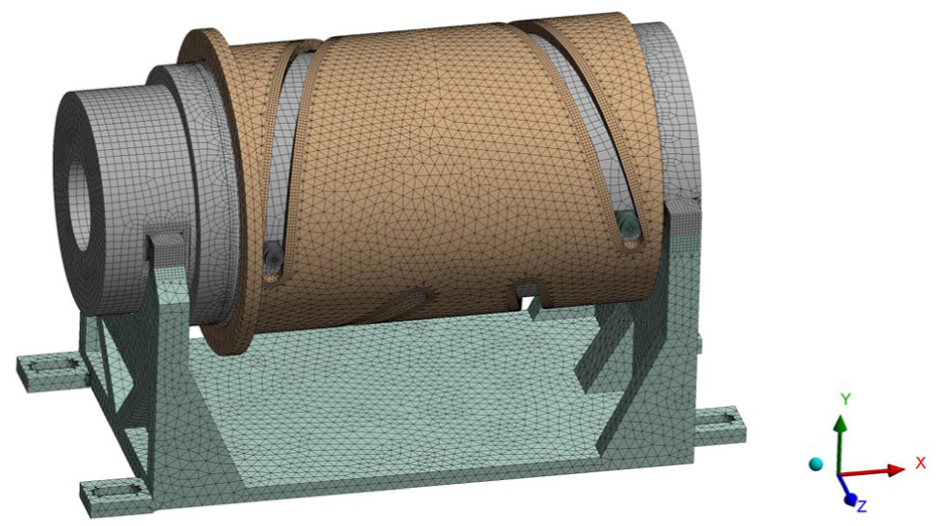
Finite element preprocessing model of the zoom camera.
The simulation modeling methods for kinematic pair contact interfaces mainly include the virtual material method and the spring–damper method. The virtual material method analyzes the stiffness and damping characteristics of the contact interface and equivalently represents it as a solid material with assigned physical parameters such as density, elastic modulus, and Poisson’s ratio. This equivalent material is rigidly connected to the two contact surfaces, enabling continuous contact modeling, which is suitable for complex surface contacts. 22 In contrast, the spring–damper method models the mechanical joint using spring–damper elements with different quantities and parameters to simulate its mechanical behavior.23,24 This approach features simpler modeling and higher parameter adjustability, making it suitable for nonlinear contact analysis. For the miniature ball bearing contact interface, the axial stiffness differs from the radial stiffness, and both vary with the applied load and preload. Therefore, the spring–damper modeling approach is adopted, as it allows assigning direction-dependent equivalent stiffness, a capability that is difficult to achieve using the virtual material method.
As shown in Figure 9, the two sides of the cam are connected to the main optical tube through miniature ball bearings. To improve the analysis accuracy, the contact interfaces in these regions were modeled using spring–damper elements with different quantities and parameters. The COMBIN14 element was employed for equivalent representation, consisting of eight radial springs and eight axial springs to achieve an accurate equivalent simulation of the actual contact characteristics.

Schematic diagram of the equivalent spring elements for the miniature ball bearing.
Modal analysis
To verify the preload–stiffness model, modal analyses of the camera were performed under different preload conditions,with preload values of 4 N, 12 N, 29 N, 50 N, 75 N, and 98 N. As shown in Figure 9(a)–(f), the modal shape cloud diagram of the first six modes was obtained for the optimal preload of F = 29 N (the modal shapes remain consistent across different preload conditions). Table 3 summarizes the natural frequencies of the first six modes of the zoom camera under various preload conditions. The data in Table 3 were plotted as curves, as shown in Figure 11.
Summary of the first six modal frequencies of the zoom camera under preload conditions of F = 4 N, 12 N, 29 N, 50 N, 75 N, and 98 N.

As shown in Figure 10, the modal cloud diagram corresponding to the preload of 29 N indicates that the 1st and 6th modes are characterized by deformation of the camera base, the 5th mode represents local deformation of the cam, while the 2nd, 3rd, and 4th modes correspond to the relative motion of the cam with respect to the main optical tube and are significantly influenced by the preload.

Cloud diagrams of the first six mode shapes from the modal analysis of the zoom camera.
The simulation results in Figure 11 show that:
(i) Under different preload conditions, the first six mode shapes remain consistent, and the first-order natural frequency exceeds 100 Hz, meeting the design requirements for space instruments;
(ii) The 2nd, 3rd, and 4th modes are related to the preload F, with their modal frequencies varying as the preload changes; among them, lower-order modes are more sensitive to preload variations, with the 2nd-order frequency exhibiting the most significant change;
(iii) When
(iv) Since the 2nd-order mode is solely related to the radial contact stiffness

where the fitting coefficient is

The finite element results, fitted curve, and analytical solution are compared in Figure 12. All three indicate that the 2nd-order modal frequency increases with

Variation curves of the first six modal frequencies of the zoom camera under preload conditions of F = 4 N, 12 N, 29 N, 50 N, 75 N, and 98 N.

Model validation of the second natural frequency versus preload: comparison of FEA results, fitted curve and analytical solution.
Conclusion
To address the problem of determining the optimal preload for the mechanism, this study established mathematical models of the preload
On this basis, modal simulations of the camera structure under different preload conditions were carried out. The results show that when
In addition, for deep-space applications, the effects of differential thermal expansion within the controlled operational temperature range on preload drift and contact clearance variation were further analyzed. The results indicate that the four-point contact side possesses a certain degree of thermal compensation capability under spring preloading, and its main effect is reflected in the drift of preload and axial stiffness, whereas the three-point contact side is mainly affected by thermally induced clearance variation. Margin verification of preload and clearance demonstrates that the mechanism can still satisfy the stiffness, motor torque margin, and anti-jamming requirements within the controlled operational temperature range. This indicates that 29 N can be regarded as the baseline design preload under nominal conditions and remains engineeringly feasible for deep-space applications.
Overall, the preload–stiffness model, optimization method, and thermal margin analysis established in this study systematically reveal the influence of preload on the mechanical performance and operational reliability of opto-mechanical structures, and provide theoretical support and engineering guidance for preload design in precision opto-mechanical systems operating under complex environmental conditions.
Footnotes
Appendix A
Handling Editor: Aarthy Esakkiappan
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by the National Natural Science Foundation of China (12502149).
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Data availability statement
Data supporting the findings of this study are available from the corresponding author upon reasonable request.