
Abstract
According to the robot’s dynamics, a high performance algorithm based on dynamic surface control is introduced to track desired trajectory, and simulations are conducted on a selective compliance assembly robot arm-type manipulator to verify the algorithm. The traditional dynamic surface control is designed based on dynamic model, which requires exact model information. Due to the model uncertainty and complex environments, the tracking performance of the controller can be significantly decreased. Therefore, a model-free fuzzy adaptive dynamic surface controller is designed, by adopting a fuzzy system with Lyapunov self-adaptation law. The new controller efficiently improves the dynamic quality. The simulation results prove that the designed model-free controller ensures that all the states and signals of the closed-loop system are bounded, the system has a faster response speed and smaller steady-state error comparing with the traditional dynamic surface control using the selective compliance assembly robot arm model, and the tracking error converge to a very small scale. Besides, the proposed algorithm can track the desired trajectory with high performance without the prior knowledge of specific parameters from the experimental manipulator, which simplifies the complexity of building the control system.
Introduction
Robot trajectory tracking has wide applications in robotic systems. Robotic motion control problems with constraints require novel control laws to improve the performance. 1 –3 Given the track profile function, Abad et al. 4 designed an optimal navigation algorithm for unmanned ground vehicle; Coelho and Nunes 5 implemented a Kalman-based active observer controller under nonholonomic constraints on wheeled mobile robots, to improve the robustness of the path following; and Matveev et al. 6 proposed a sliding mode strategy which can be used for the navigation of a unicycle-like robot under moving obstacles.
Since the first selective compliance assembly robot arm (SCARA) was designed by Hiroshi Makino in 1978, this kind of four-degree robot is widely used in industries, high-speed and precision of motion. 7 Such as handling, assembly, welding and other applications. Because SCARA’s control model is highly non-linear, time-varying, and strongly coupled, and it is prone to vibration and shock during operation, which makes the high-performance control of SCARA very difficult, so it needs to design advanced control algorithms for it. 8,9
Backstepping control had long been a powerful tool for dealing with nonlinear systems with parametric uncertainties. However, there is a problem of “explosion of terms” 10 in the backstepping design algorithm, which greatly increases the amount of computation. To solve this problem, Swaroop et al. proposed the dynamic surface control (DSC) algorithm 11 by introducing a low-pass filter into the backstepping design process. Then a series of controllers for nonlinear systems were proposed, based on DSC. 12 –16
Although the DSC algorithm solves the problem of the dimension explosion of backstepping, the DSC control law based on the dynamic model needs to control the dynamic parameters of the target, which weakens the anti-interference ability of the closed-loop system. Adaptive fuzzy controller has been researched by many scholars, and it can be used to decrease the negative influence caused by robot model uncertainty. For example, Soltanpour et al. 17 used adaptive fuzzy sliding mode control to approximate nonlinear and uncertain robot dynamics. Long et al. 18 built an adaptive neural network control method to realize high-precision manipulator position tracking. Chen 19 achieved a dynamic fuzzy network to solve the n-link robot manipulator tracking control problems.
To realize a control law without model parameters and improve the tracking speed, DSC algorithm combined with adaptive controller and fuzzy state observer is proposed in paper. 20 –22 However, many research studies lack the industrial scene application. The proposed DSC algorithm which achieves a whole closed-loop system not only satisfies the desired dynamic and static performance but also guarantees a high performance tracking trajectory. 23 Fuzzy logic systems are used to approach the uncertain model functions of the control target. 24 The proposed algorithm guarantees the uniform boundedness of all the signals in the closed-loop system. By choosing the appropriate controller parameters, the tracking error can be significantly restrained 25 ; this method can significantly decrease the external disturbance and internal uncertainty caused by the robot model.
SCARA-type manipulator
SCARA-type robots are characterized by its small load and fast speed. They are mainly used in such applications as fast sorting, precision assembly in computing, communication, and consumer (3C) industry, food industry, and so on. Thus, this kind of robot is used for analyzing in this article, due to the unique structure and its wide usage. 26,27
Kinematic analysis of SCARA
The kinematics of SCARA robot is considered first, which is an important basis for studying robot dynamics and control. Figure 1 shows an abstract SCARA structure and the base coordinate of the position and attitude. The Denavit–Hartenberg (DH) parameter 28 of the SCARA is given in Table 1.

A typical SCARA structure with four joints. SCARA: selective compliance assembly robot arm.
The DH parameter assignment of the SCARA.

SCARA: selective compliance assembly robot arm.
Applying the homogeneous transformations given by

where

where
By using the inverse matrix, each variable in matrix (2) can be recursively introduced. In this article, Euler transformation is introduced to solve the inverse kinematics problem.







where
Dynamic analysis of SCARA
The dynamic analysis is implemented by employing the Lagrange–Euler formulation which is based on the principle of energy conservation. 29,30 According to the general formula of robot dynamics, the dynamic equations of SCARA robot are established as


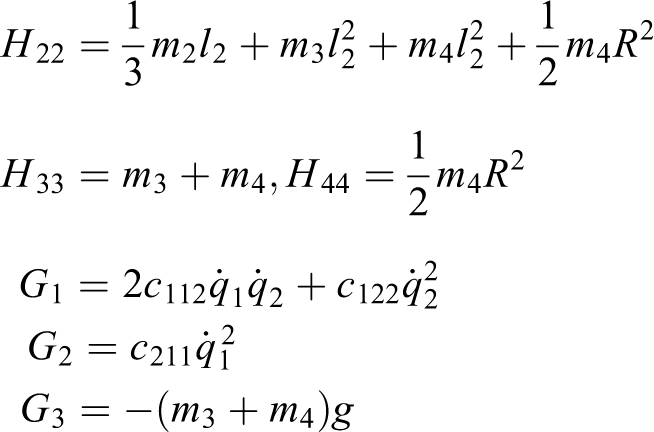
The gravity expression is

The moment of inertia, inertia cross product, and first moment of each joint are as
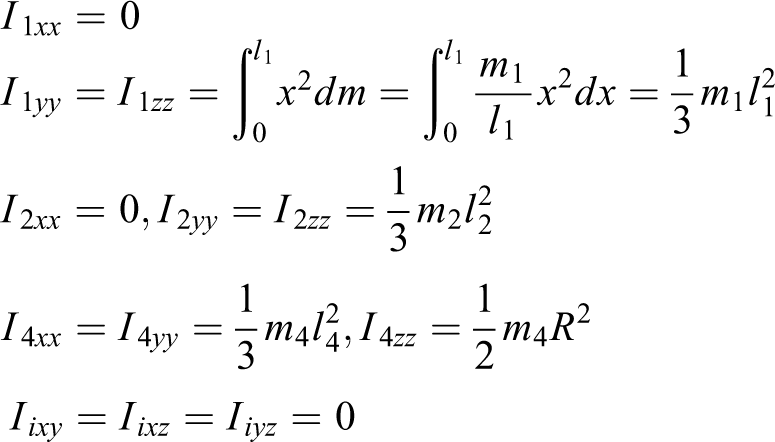
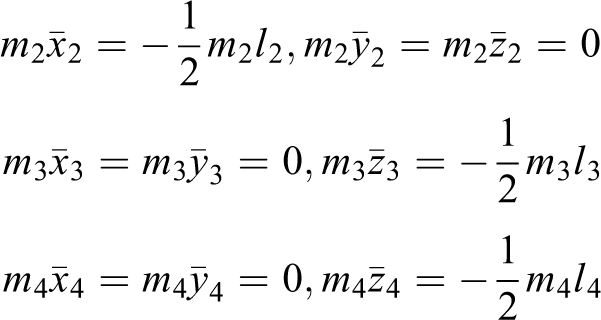
where mi is the connecting rod quality, li is the connecting rod length, and R is the radius of the rolling guide.
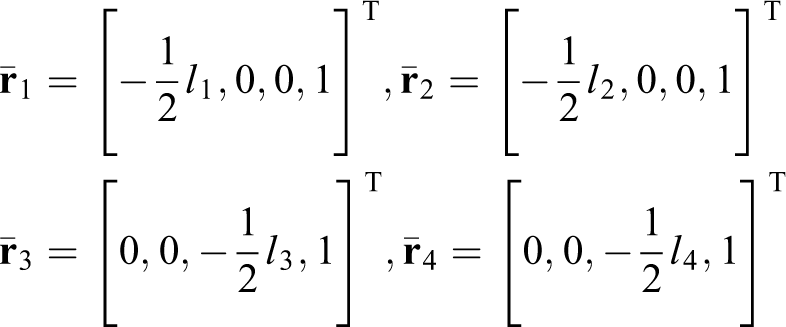
The pseudo-inertia matrix of each joint can be obtained according to
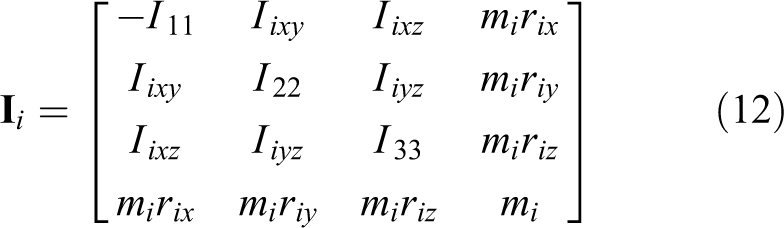
where
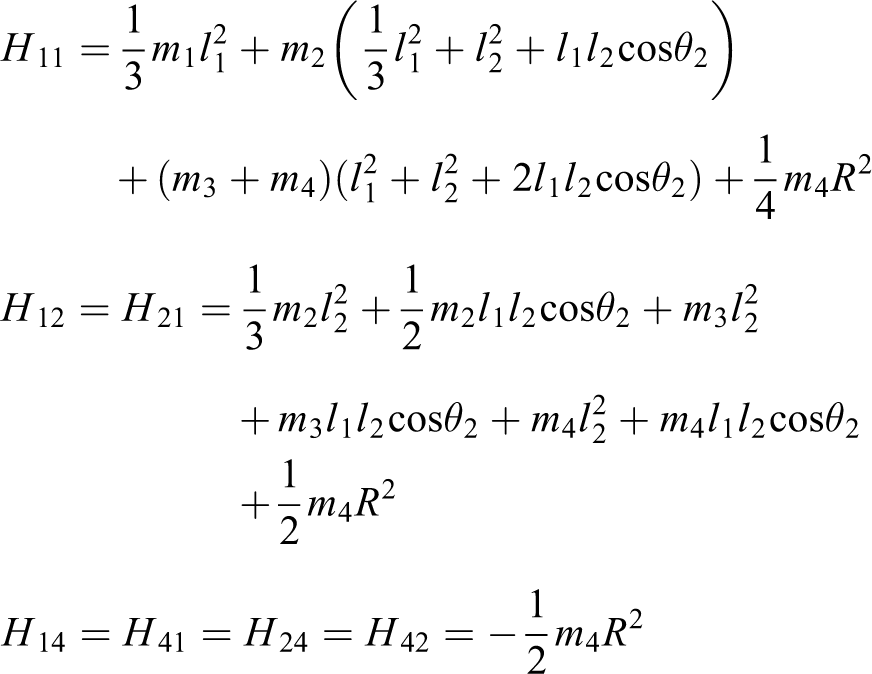
Combining the above equations, the dynamic model of SCARA is obtained
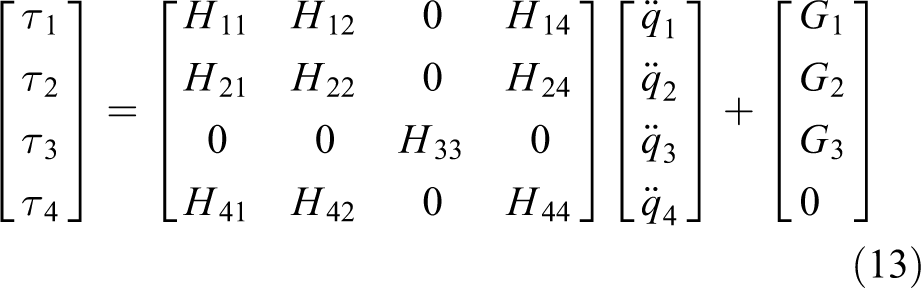
where
Dynamic surface control
As mentioned before, the traditional DSC uses dynamic filters to overcome the “explosion of terms.” In this section, systematic steps are given to establish DSC, which is employed on the dynamic model of SCARA. The control structure consists of five modules: the input and output trajectory module, the DSC control law module, the robot module, and the low-pass filtering module. The robot control structure is shown in Figure 2.

DSC robot system. DSC: dynamic surface control.
The robot module contains the parameter information and the dynamic model of the manipulator. According to the dynamic model of SCARA in equation (10), the dynamic character of SCARA can be sorted into

where
To simplify the controller design, define

Then, the state space expression of SCARA can be designed as

The first dynamic surface is defined as

The second dynamic surface is defined as

where
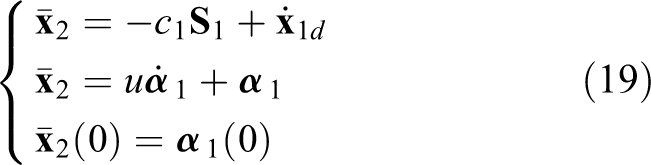
where c 1 is a positive number greater than zero and u is the filter coefficient.
Then the filter error is defined as

The Lyapunov function is defined based on position tracking error, virtual control, and filter error

Then, taking a derivative of equation (21), the stability analysis is expressed as follows
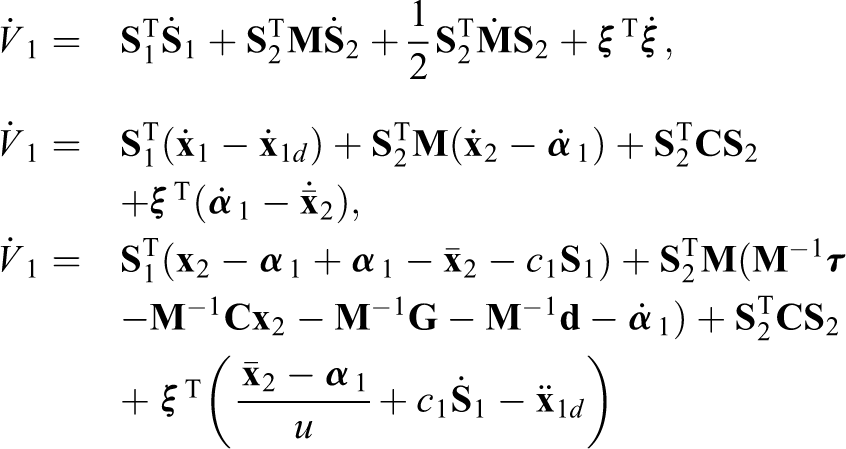
The final form of

According to the dynamic model structured in equation (10), the control law is designed as

Taking equation (23) into equation (22), then

To simplify the calculation, let

where

Similarly to the analysis of ineq. (26), ineq. (27) holds

Bring ineq. (26) and ineq. (27) into equation (25), then
Because
The fuzzy adaptive DSC algorithm
As shown in equation (23), a traditional DSC is established on the model of SCARA. However, the traditional DSC algorithm needs specific parameters of the manipulator, such as the gravity
Due to the uncertainty of the dynamic model, the performance of DSC algorithm could be influenced. Therefore, based on the DSC algorithm, an approximate fuzzy algorithm is established to deal with the uncertainty, imprecision, and vagueness, 32 and a fuzzy adaptive DSC (FADSC) algorithm is proposed to ignore the model of the robot and improve the performance of the closed-loop system. The control structure of FADSC consists of six modules as shown in Figure 3. Comparing with the DSC control method in the third section, a fuzzy control module is proposed and the robot module which contains the robot model information is replaced by an unknown plant module.

FADSC robot system. FADSC: fuzzy adaptive dynamic surface control.
Define

Defining a fuzzy system named

where N is the number of total fuzzy rules,
Within the author’s cognition, the defuzzification methods in fuzzy system contain center of gravity defuzzification method, center average defuzzification method, and maximum defuzzification method. The center average defuzzification method used in this article is the most widely used and effective defuzzification method. Then, singleton fuzzifier and product inference 33 are used to establish the output of the fuzzy system
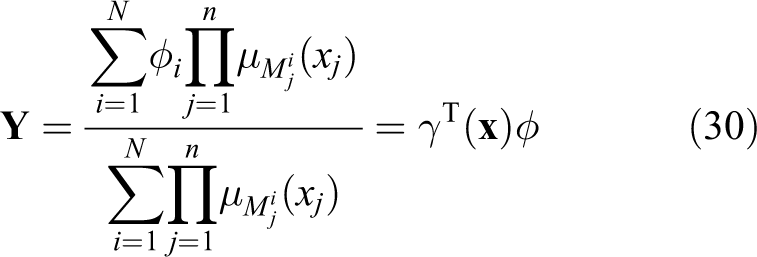
where
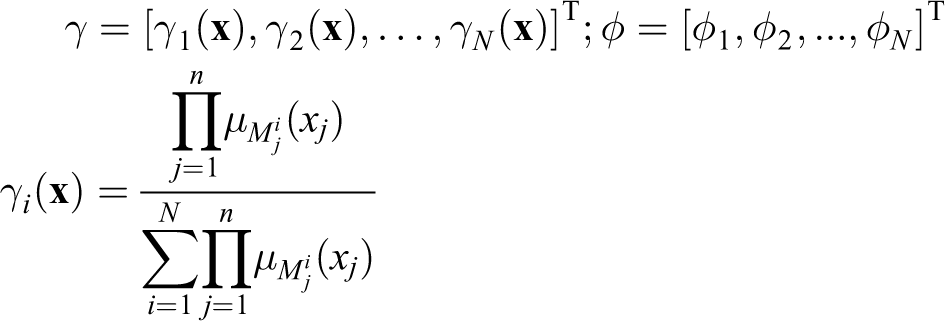
For the fuzzy approximation of

where

Defining the best approximation constant as

The error

Then, the designed adaptive control law is defined as

The Lyapunov function is defined as

For the convenience of calculation, let
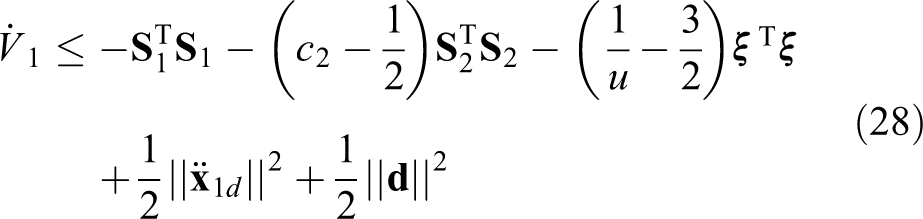
Therefore, the derivative of Lyapunov function

It is obvious that
Substituting the above ineq. (38), the following inequation is obtained
For
Using ineq. (40) to substitute ineq. (39), then we obtain
Because

Therefore, by simply transforming ineq. (42), ineq. (43) is obtained

Substituting equation (41) by equation (43), then
Define a constant

There must be

Let

Define the compact set
where
From ineq. (46), it can be concluded that V is bounded, and therefore all signals of the closed-loop system are bounded. From the above derivation, we can see that the FADSC algorithm does not need the exact parameters of the SCARA manipulator. Thus the system is robust under modeling uncertainty.
Simulation results and analysis
We define the following parameters of mechanical structure with the SCARA robot, Athena’s AH-4520-054 S 34 as reference

Two kinds of signals are chosen as input position instructions, which are mixed sine signal and triangle signal. The tracking abilities of DSC and FADSC are investigated in this section. The input desired trajectories are in the following forms: The desired trajectory 1

The desired trajectory 2

For the third vertical joint, as a result of the influence of gravity and velocity mutation, k is chosen as 0.16, for all the other three joints
The initial state of the system is zero. The control period of the system is chosen as 1ms. The external disturbance on the torque is in the form of
where
The disturbance on the robot model is random, while it has an upper limit form of

The controller parameters c 2 and k are 50 and 15, respectively; the filter coefficient u is 0.01; and the adaptive control law coefficient m is 200. In the simulation study, three fuzzy sets are defined over interval [−1.25, 1.25] for all states, and by choosing partitioning points as −1.25, 0, and 1.25, their fuzzy membership functions are given as follows

where
According to the two controllers designed in equations (23) and (33), we get the simulation results with trajectories 1 and 2, respectively. Figures 4 to 7 show the simulation results of the tracking process under friction disturbance and model uncertainty. To verify the effectiveness of the proposed algorithm, two experiments were conducted, mixed sine signals and triangle signal are selected as instruction position. From the comparison between Figures 4 and 5, and the comparison between Figures 6 and 7, it can be seen that the traditional DSC algorithm is capable of tracking desired sine input location curve almost successfully; however, the external disturbance causes negative influence on the phase position. Figure 5 gives the comparison of position tracking results under the mixed sine signal with disturbance. It is clear that the traditional DSC has poor performance when it tracks the peak value of sine signal especially. In addition, Figure 7 explores the position following ability with input triangle signal, from which we can see that the traditional DSC does not respond to the instructions fast enough.

Input mixed sine signal and position tracking results without disturbance: taking joint 1 for example. DSC: dynamic surface control.

Input mixed sine signal and position tracking results with disturbance: taking joint 1 for example. DSC: dynamic surface control; FADSC: fuzzy adaptive dynamic surface control.

Input triangle signal and position tracking results without disturbance: taking joint 1 for example. DSC: dynamic surface control.

Input triangle signal and position tracking results with disturbance: taking joint 1 for example. DSC: dynamic surface control; FADSC: fuzzy adaptive dynamic surface control.
Figures 8 and 9 give details of error comparison when DSC and FADSC tracking the desired trajectories 1 and 2, respectively, all of the four position tracking errors with respect to the corresponding four joints of the SCARA are investigated. It can be considered that FADSC has better tracking accuracy and faster response compared to the traditional DSC.

Position tracking error comparison of desired trajectory 1: (a) joint 1, (b) joint 2, (c) joint 3, and (d) joint 4. DSC: dynamic surface control; FADSC: fuzzy adaptive dynamic surface control.

Position tracking error comparison of desired trajectory 2: (a) joint 1, (b) joint 2, (c) joint 3, and (d) joint 4. DSC: dynamic surface control; FADSC: fuzzy adaptive dynamic surface control.
Tables 2 and 3 show the position tracking results of the numerical analysis of traditional DSC and FADSC. To analyze the simulation results, we adopt a set of simple parameters to quantify the performance more clearly. The maximum absolute peaking error (MAPE) and the integral of absolute error (IAE) were calculated and shown in Tables 2 and 3. From the simulation results, the FADSC also shows a better performance. Taking joint 1 for example, when tracking the desired trajectory 1, FADSC decreased 91.61% of IAE and 83.33% of MAPE for the position tracking; when tracking the desired trajectory 2, FADSC decreased 88.18% of IAE and 90% of MAPE for the position tracking. Furthermore, for all the four joints, the traditional DSC is fluctuating on position error in whole 10 s, while proposed algorithm reached its stable state faster with smaller tracking errors.
Position tracking error analysis of trajectory 1.

DSC: dynamic surface control; FADSC: fuzzy adaptive dynamic surface control; MAPE: maximum absolute peaking error; IAE: integral of absolute error.
Position tracking error analysis of trajectory 2.

DSC: dynamic surface control; FADSC: fuzzy adaptive dynamic surface control; MAPE: maximum absolute peaking error; IAE: integral of absolute error.
Conclusion
In conclusion, this article applies both traditional DSC and proposed FADSC algorithms on the SCARA manipulator. The simulation results prove the effectiveness of the new algorithm, which has a higher performance on position tracking tasks. Besides, comparing with the traditional DSC algorithm, FADSC do not need accurate parameters of the manipulator. The external disturbances and modeling error have an obvious influence on the closed-loop system of the controller designed by the traditional DSC algorithm, but have almost no impact on the proposed closed-loop system. Simulation results show the effectiveness of the proposed model-free controller with high-speed tracking capability and high stability, which can be extended to multi-joint manipulators for the applications of robot arm with uncertain parameters.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was supported by the National Natural Science Foundation of China (61973099), Fundamental Research Funds for the Central University (HIT.NSRIF.2017025, HIT.NSRIF.2019052), the China Postdoctoral Science Foundation (2017M621259, 2016M591532), and the Heilongjiang Postdoctoral Fund (LBH-Z16062).