
Abstract
This paper presents simple rules to improve the efficiency of picking-and-placing a ball. A simple model of an upper limb was created to examine the gross motions associated with picking-and-placing a ball in sports such as rugby and American football. The research used the Lagrange formulation for a simple representation of the major links and joints of the upper limb. From the simple models, two simple rules were extracted to improve the efficiency of picking-and-placing the ball. Results from testing the use of the rules with both a simple mechanical arm and with human players are presented. Analysis and testing suggested that applying the rules could increase the speed of the pick-and-place movement by up to 17.5%.
Introduction
This paper examines the repeated pick-and-place movement in Rugby and American Football in an attempt to improve performance and technical play. Suggested changes in teaching and training are presented for picking a ball from the ground (or from another player) and placing a ball into the hands of another player. This is different from throwing or passing a ball. The pick-and-place move has been ignored in the literature despite the study of other moves in ball sports having been proven to improve performance 1 and inform coaches. 2
In order to investigate improvements to the pick-and-place movement, simple upper limb models were created by constraining the representation to the particular quick pick-and-place task. Models were developed using a method for calculating the simplified dynamics for an upper limb based on Lagrange.3,4 Simple rules for improving the movement were developed and applied to modify the motions of rugby players. The model was validated practically using a simple mechanical arm in a laboratory and then the simple rules were experimentally validated using a series of human tests, improvement was achieved. This suggested a suitable balance between accuracy, simplicity and feasibility.
The paper begins with a short review of similar movements and related sports and a short description of rugby. Then the specific pick-and-place movement is described and placed in the context of rugby. A simple model is created and some simple rules are derived from that model. The rules are tested with a simple robot arm in a laboratory and then with human volunteers.
During ball receipt and passing, a rugby ball is usually taken upright at chest height on the receiving side and swung from the receiving side to the passing side and then released to send the ball to a team-mate, waist and hips provide acceleration, turning torso and face to where the ball is to go. The ball is spun and released as the torso-turn takes place. Picking-and-placing is similar to passing a rugby ball but starting and ending velocities are zero. It does not involve catching or any explosive motion to provide accelerations for a throw.
Much literature has investigated a human arm during planar ballistic movement, 5 and Sasakawa and Sakurai 6 and Tanabe and Ito 7 both examined joint angles. Other research concentrated on ball sports but considered bowling or throwing as opposed to picking-and-placing.8–19 Consideration was given to passing 20 and some research considered quad rugby 21 but not the picking-and-placing of a ball.
Much research has concentrated on force and sensing force and the ability to generate or transfer explosive muscle power. Team coaches have concentrated on passing mechanics using visual inspection of ‘live’ performance and sometimes videotaped analysis. They have not considered picking-and-placing a ball but mathematical modelling could be useful here.
Many researchers have modelled the human body mathematically.22–25 The CHARM project developed a dynamic simulation of musculoskeletal structure.26,27 The model used in this paper is much less complicated but is successfully used to generate some simple rules to improve the picking-and-placing of a rugby ball.
In rugby, the ball is in play for only about half the match (40 min), and physical ‘confrontations’ (usually tackles) vary between 20 and 40 per player per match. 28 A scrum, lineout, ruck or maul occurs about every 30 to 40 s during a game and it is during these activities that the picking-and-placing move becomes important. The aim of picking-and-placing is to give the ball to a player who can then run or pass the ball into free-play with the backs. That is often required after a scrum, general play maul, catch (and drive) after a lineout throw, maul, line-out maul, ruck, Waratah Hammer or pick up from an unsecured ball. The move is especially important when these (often set-piece-moves) do not go to plan because they are interrupted by the opposition. Placement needs to occur as quickly as possible before a player is tackled, ball captured, play brought to a stand-still and/or a scrum results.
Modelling
A simple model is used in this work for situations when players do not have the time or opportunity to throw or pass the ball and instead they have to pick-and-place the ball. A first step was to investigate links and joints in human arms. Upper limbs are biomechanical systems with four rigid links (humerus, radius, ulna, hand) and seven joints (sterno-clavicular, acromio-clavicular, scapulo-thoracic, gleno-humeral ulno-humeral/humero-radial and ulno-radial). Assuming translations were negligible compared to rotations when picking-and-placing a ball, then all, except the scapulo-thoracic joint, could be assumed as ball and socket joints. The scapulo-thoracic joint did not properly involve articular structures between scapula and thorax but due to its surrounding muscles, the scapula was considered as constrained to glide on the thorax. That reduced the degrees-of-freedom (DOF) to four. A simplification for the pick and place task was to consider these links as connected by:
Shoulder (humerus with shoulder); Elbow (humerus with radius and ulna); Wrist (radius with ulna and radius with hand).
To simplify further, the hand was considered as a rigid prolongation as passing-spin was not present during picking-and-placing. Arm segments were approximated by rigid cylinders. The shoulder was initially modelled as two rotary joints and the elbow was simplified to a single DOF. Despite these simplifications and constraints, a useful mathematical model was still derived and used to generate simple rules for players, specifically for when both arms were used to pick-and-place a ball and almost no lateral movement occurred in the shoulder. The shoulder was therefore modelled as an ideal spherical joint. For picking-and-placing, the prono-supination angle appeared small and so the models were further simplified by neglecting this.
The creation of a simple model to produce some simple gross motion rules required an idealized underlying mechanical model; a wireframe hierarchy of one-DOF rotational joints.
29
The simple model used is shown in Figure 1 and is similar to that used by Sanders et al.4,30,31 to model limbs. Although sufficient for most joints (e.g. forearm) shoulder joints would normally be more complicated. The wireframe hierarchy was considered suitable here because the picking-and-placing motion constrained the shoulders as both hands tended to be on the ball and the usual twist required for passing a rugby ball was not present.
The simple model used for the two main links of the upper limb (L1 and L2).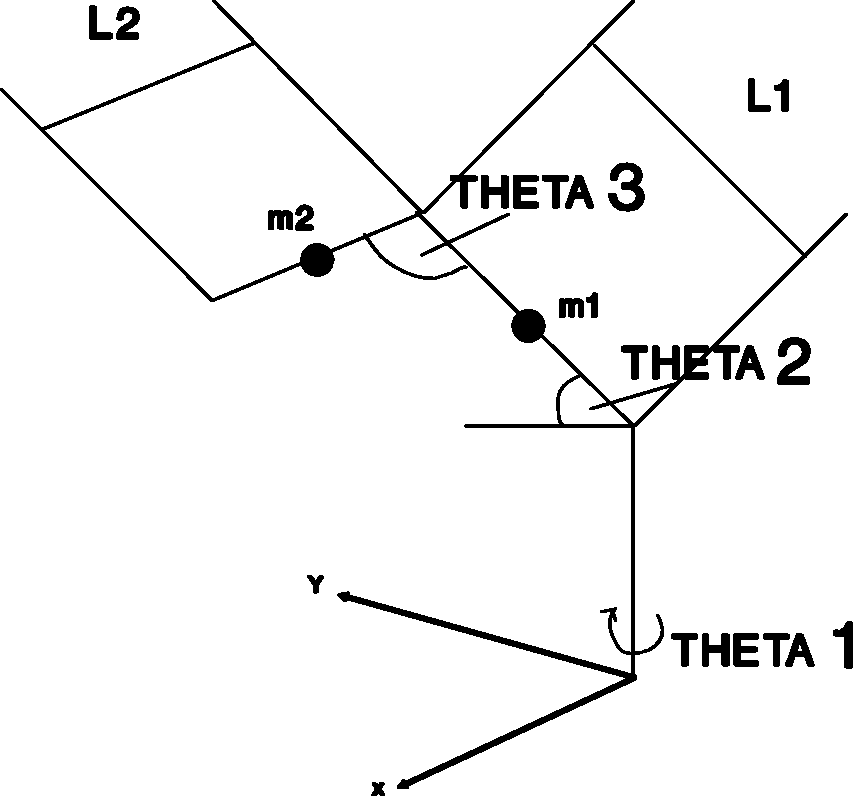
Having settled on a simple geometric model, two approaches to formulating dynamics equations were considered: Newton–Euler and Lagrangian. Lagrange solves problems using closed-form differential equations4,30 and upper limb dynamics were considered as closed form so Lagrange was selected to represent dynamics by second-order coupled non-linear differential equations.
The calculation depended on the Lagrangian equation in terms of Lagrangian coordinates q:
L is the difference between kinetic and potential energy:

Methods
Torque equations were derived from the Lagrangian equation for each of the links of the upper limb parameters. The upper limb was modelled as two main movable links: L1 and L2 (of mass m1 and m2) which could rotate through θ2 and θ3 (Figure 1). For example, the torso L0 (of mass m0) rotated through θ1. This was achieved by calculating the kinetic and potential energies from the Lagrangian equation of the upper arm. That was calculated from the energy terms for each link and that in turn was calculated by taking derivatives of the links (expressed in Cartesian coordinates in terms of joint angles) with respect to time.
The torque equations had several components: Effective inertias/coupling inertias; Coriolis/centripetal coefficients; and Gravity loadings.
Centripetal and Coriolis forces were considered to dominate inertial forces during the pick and place movement, so that the insignificant dynamics expressions could be eliminated. Arm joints experience relatively high velocities during gross moves when accuracy is less critical. This is different to fine motions when accuracy is more important, so that gravitational and inertial forces may matter more, but that does not apply here. The inertial terms were assumed to be less significant as research here was concerned with gross motions and inertial and coupling inertia terms were excluded to give a simplified model of the upper limb.
Once a simple model had been derived, then a simple mechanical arm was used to test the simplified model. Drive currents to DC motors were measured to represent torques and angular positions were measured during static and moving tests. Once tested successfully, then experiments were conducted with human players picking and passing a ball.
Mechanical testing took place in a university laboratory using a simple mechanical arm and recording joint motor currents.4,32–35 Output torque was approximately linear to motor current (except for a small offset due to static friction), so that computing torque from current was a simple linear mapping. Position and velocity were measured for various inputs, and currents necessary to generate motion were observed. Since joint torques were directly related to constants by dynamics equations and intermediate joint positions were known, a set of equations linear to the constants was established and used to find constants in the dynamics equations. A load of 450 g was used (approximate weight of a rugby ball and slightly heavier than a Gridiron ball) and parameters for modelling the upper extremity were taken from Veeger et al. 36 Angular joint positions were fed-back from encoders and three tests were conducted: (i) Static Tests, (ii) Single Joint Motion Tests and (iii) Multiple Joint Motion Tests.
Static tests
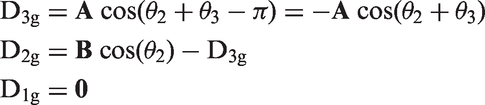
Static tests were obtaining gravitational constants. Effects from other dynamics terms were eliminated, so that joint torque became a function of gravity loading. Only the joint of interest was moved so that velocity and acceleration dependent terms disappeared. With other joints locked, torque required to move each joint was measured. Torques were estimated by moving the arm to a desired configuration and then incrementing output through D/A converters one bit at a time until motion started. Results were tables of gravitational torques (Dig for link i) for varying θ1, θ2 and θ3.
If τpi was torque in one direction and τmi torque in the other, and Fis represented static friction for joint i, then:


This procedure was repeated for each 10° increment of each joint angle that occurred as a basis function for Dig. Two constants,

so that:
Single joint motion tests
Single joint motion tests were achieved by driving joints at a constant velocity. A step velocity demand was applied and joints ran through 10° before taking readings to avoid inertial effects. Only one joint moved at a time so that:


So steady-state velocity was:

Current required to maintain a constant velocity, and velocity of base joint for a constant demand output, was recorded for various configurations.
Multiple joint motion tests
Multiple joint motion tests were used to estimate coupling terms. Motions requiring joints to move simultaneously were applied. An input was applied to joint i, first with joint j, stationary and then with joint j moving. Responses in both cases with gravitational compensation were assumed as:

Two effects dominated the simple dynamics: the varying effect of θ2 and θ3 on waist rotation, and the gravity effect of θ3 upon θ2. These suggested two simple rules to improve gross motions associated with quickly picking-and-placing a rugby ball:
To increase turning velocity, arm(s) should move the centre of mass quickly towards the centre of rotation by moving θ2 and θ3 towards 90°. To reduce gravity loading effects, move θ3 towards 90° during motions of θ2.
These rules equated to pulling the ball into the body as quickly as possible for the first half of the movement (turn and/or lift) and then pushing the ball out at the latest moment.
The simple mechanical arm was used to test the rules. As a typical example, it was initially moved from (140°, 0°, 180°) to (−140°, 0°, 180°) via (0°, 90°, 180°). Movement took an average of 4.49 s. When movement was modified to use the same START and END, but to move through (0°, 90°, 90°), the mechanical limb took an average of 4.12 s; saving 0.29 s (6.5%). Similar tests were conducted for shoulder and elbow. With waist still, shoulder was moved from −10° to 90° with the elbow at 180°. This gave an average time of 1.96 s for the simple mechanical arm. When movement was modified so that elbow moved in towards 90° until shoulder reached 50° and then moved out to 180°, an average time of 1.76 s was recorded; saving 0.2 s (11%).
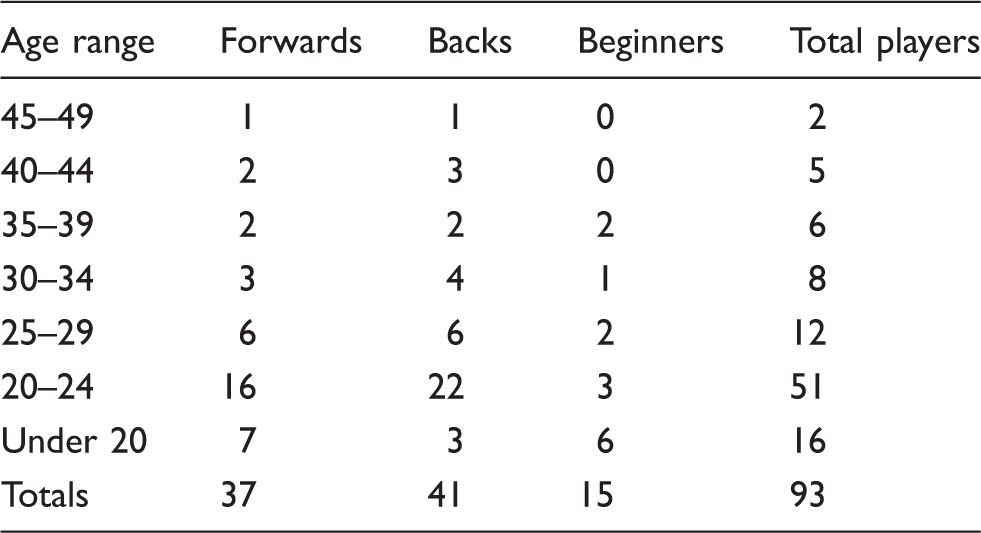
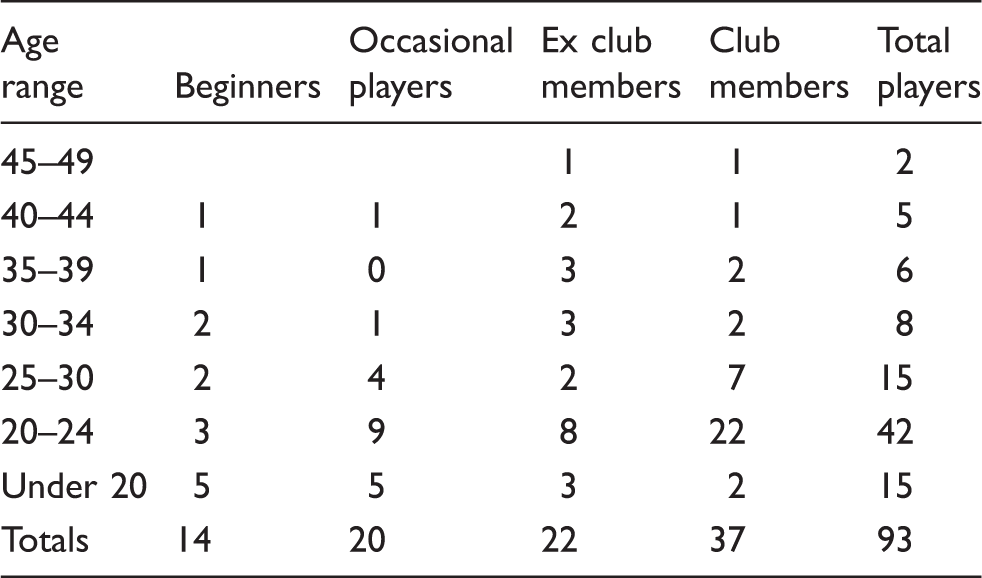
Distribution of participants among rugby playing positions.
Ethical approval was granted for the study by the ethics panel at the University of Portsmouth. Protocols were submitted to, and approved by, the University of Portsmouth ethics committee.
Distribution of ability levels for participants.
Participants were familiarized with the task by explaining and demonstrating the movement they were to carry out. That explanation was followed by two experiential trials. Initially, each trial began randomly with either TEST_1 or TEST_2 and then moved on to TEST_4 and TEST_3, respectively. Movements were observed and timed and six were filmed and photographed. For each pick-and-place, participants picked a ball from the hands of a team mate with arms fully extended and passed the ball towards a post or another player positioned on the other side (so that a quick 180° upper-body rotation was always required).
Testing
TEST_1
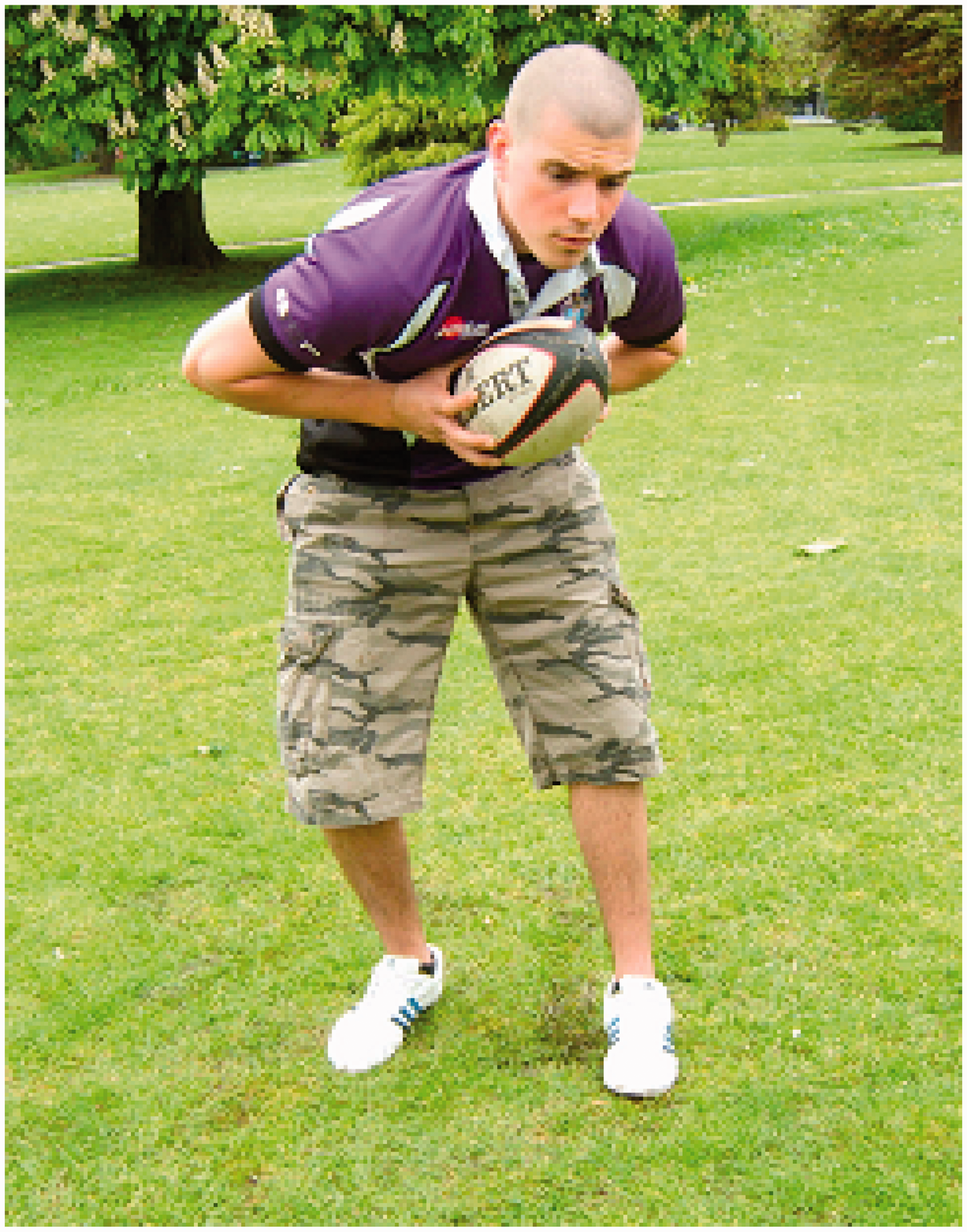
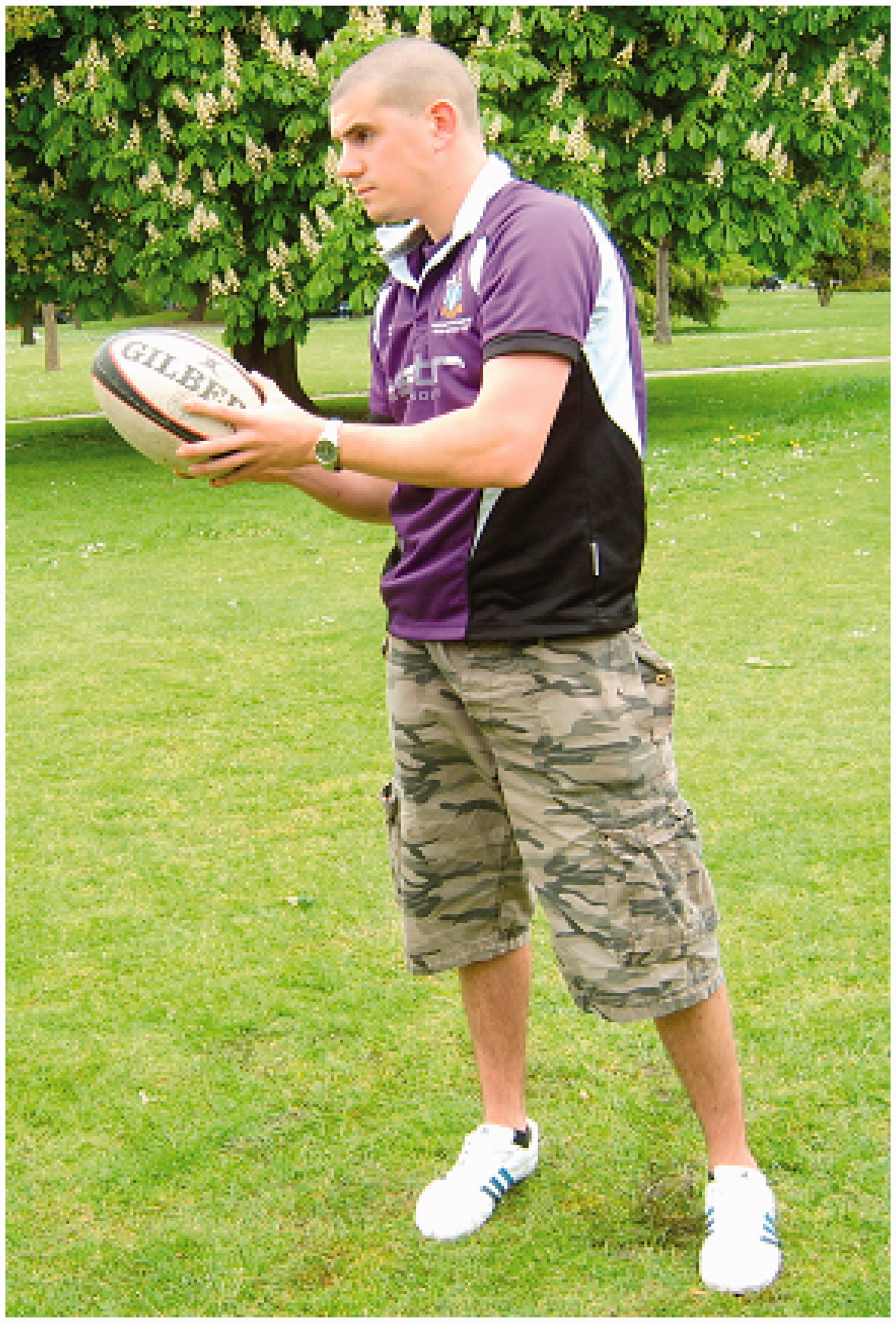
Half the participants did TEST_1 first. They made 50 pick-and-place movements without any rules being discussed. They picked up the ball from the ground in the way that they would normally make the movement during normal play (Figure 2) and then touched the ball to the hand of the player on the opposite side (Figure 3). Then they touched the ball to the floor in the initial starting place. That was repeated 50 times.
Picking the ball from the ground at the beginning of T1. Touching the ball to the hand of the player on the opposite side during T1.

Rules were then explained and demonstrated to each participant. Participants then made 50 pick-and-place movements while applying the rules. They picked up the ball from the ground as before (Figure 4) and touched the ball to the hand of the player on the opposite side, but during that movement, the participants pulled the ball into their body (Figure 5) and pushed it out towards the other payer at the end of the movement (Figures 6 and 7).
Picking the ball from the ground at the beginning of the second part of T1. Pulling the ball into the body during the second part of T1. Pushing the ball away from the body during the second part of T1. Completing the placing movement in the second part of T1.

Then they touched the ball back to the floor in the initial starting place while applying the rules again. That was repeated 50 times with the purpose of establishing a set of results for normal play. This was so that these results could be compared with the results from applying the new rules to measure the improvement (if any). Participants completing TEST_1 then moved on to TEST_4.
TEST_2
Half the participants completed TEST_2 first. The movement started by touching the ball to the hand of a player to one side. The ball was moved to touch the hand of the player on the opposite side, then the ball was moved back to the hand of the original player. That was repeated 50 times and was again to show the average improvement (if any) of applying the rules compared to normal play.
Then the rules were explained and demonstrated to each participant. Participants could briefly practice the movement and then they made the same 50 pick-and-place movements while applying the rules. They started again by touching the ball to the hand of a player to one side. Then they touched the ball to the hand of the player on the opposite side but pulled the ball into their body during the movement and pushed it out towards the other payer at the end of the movement. Then they touched the ball back to the original player while applying the rules again. That was also repeated 50 times.
TEST_3
Participants moved from TEST_2 to TEST_3. Rules were explained and demonstrated again to each participant to remind them of the movement before testing and participants had an opportunity to briefly practice again using the rules. Participants then made 50 pick-and-place movements while applying the rules. They picked up the ball from the ground and touched the ball to the hand of the player on the opposite side but pulled the ball into their body during the movement and pushed it out towards the other payer at the end of the movement. Then they touched the ball back to the floor in the initial starting place while continuing to apply the rules.
Then a different set of moves were explained and demonstrated. Participants made the same 50 pick-and-place movements, but this time, their arms were outstretched as far as possible during movement. That was similar to the positioning of the arms when passing a ball in rugby. They picked up the ball from the ground and touched the ball to the hand of the player on the opposite side but with arms outstretched. Then they touched the ball to the floor in the initial starting place. That was to compare the worst case with the best case suggested by the rules.
TEST_4
Participants who started with TEST_1 moved on to TEST_4. Rules were explained and demonstrated again for each participant. Participants started by touching the ball to the hand of a player to one side and then they touched the ball to the hand of the player on the opposite side but pulled the ball into their body during the movement and pushed it out towards the other payer at the end of the movement. Then they touched the ball back to the original player while applying the rules again. That was repeated 50 times. Then the movement was repeated 50 times with arms outstretched. Participants made the same 50 pick-and-place movements with arms outstretched. That was to compare the worst case with the best case suggested by the rules.
Results
Times for the original movement and the revised paths were recorded and are shown in Figures 8 to 11.
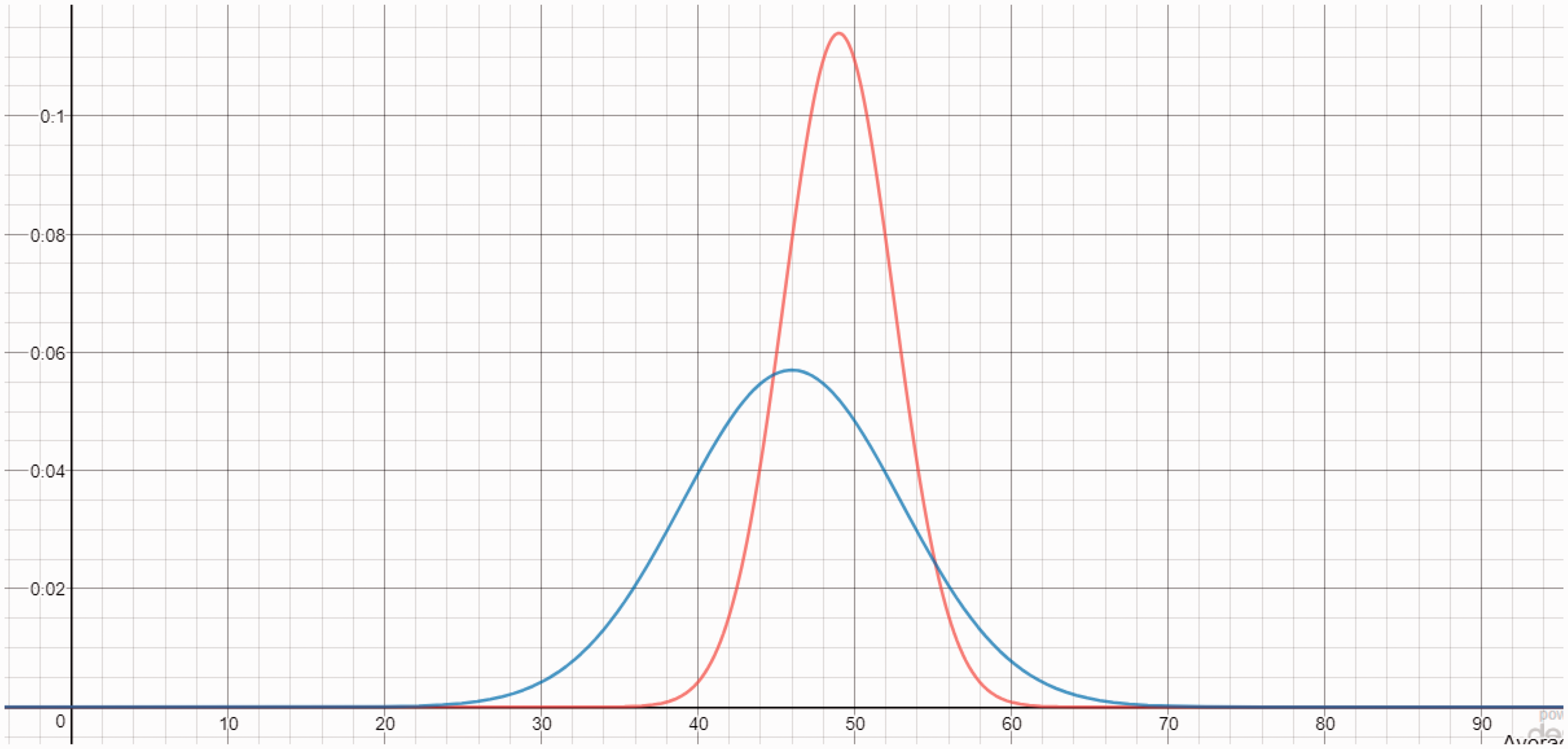
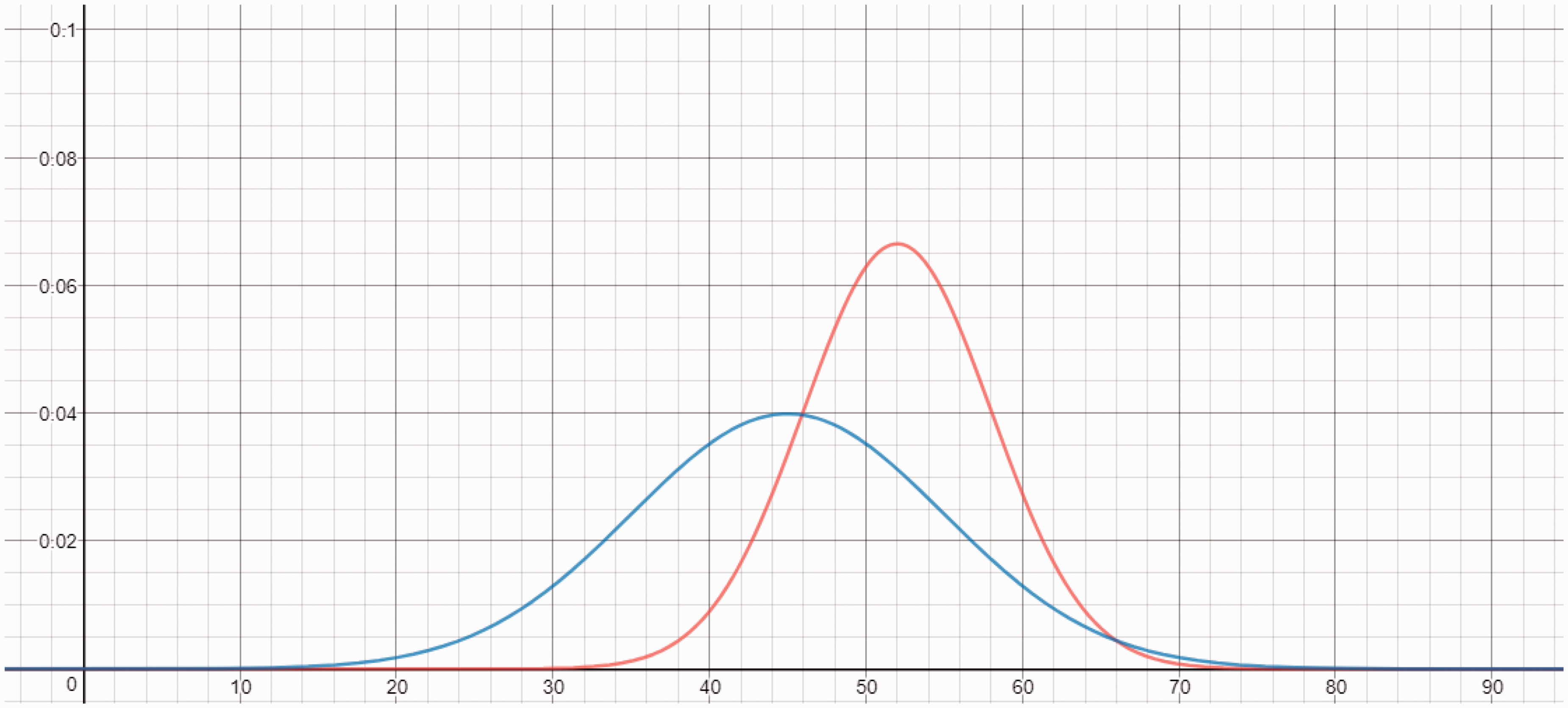
TEST_1 when picking-and-placing from the ground without any rules being explained. The horizontal axis represents time from 0 to 1 second. The results are presented as a normal distribution using a calculation of the mean and standard deviation. TEST_2 when picking-and-placing from one player to another without any rules being explained. The horizontal axis represents time from 0 to 1 second. The results are presented as a normal distribution using a calculation of the mean and standard deviation. TEST_3 when picking-and-placing from the ground using the rules. The horizontal axis represents time from 0 to 1 second. The results are presented as a normal distribution using a calculation of the mean and standard deviation. TEST_4 when picking-and-placing from one player to another with arms outstretched. The horizontal axis represents time from 0 to 1 second. The results are presented as a normal distribution using a calculation of the mean and standard deviation.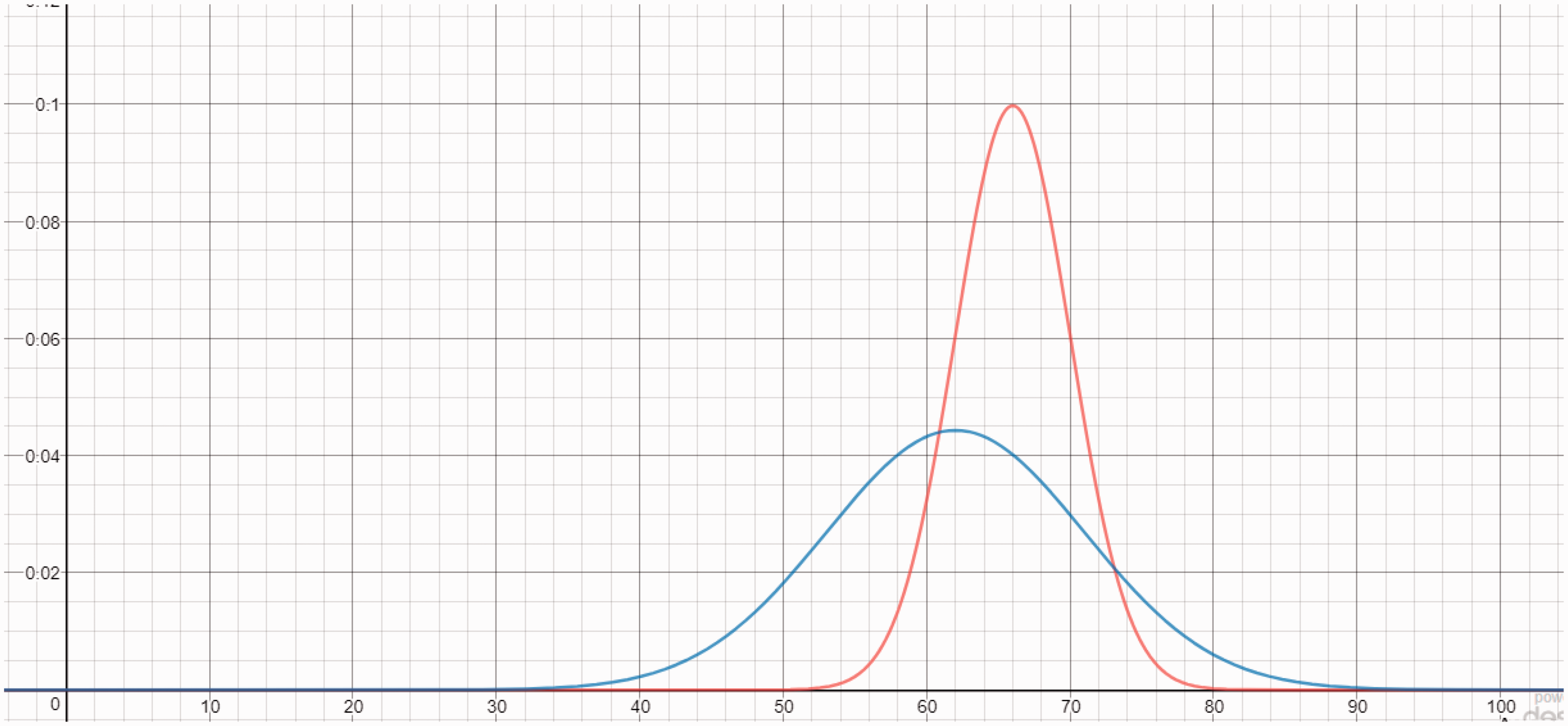

The results were:
For TEST_1, when picking-and-placing from the ground without any rules being explained, then the average movement took 0.66 s (averaged over 50 movements). When modified to use the same start position, but using the simple rules, then the movement took an average of 0.62 s (averaged over 50 pick-and-place movements); saving 0.04 s per movement (6%) as shown in Figure 8. For TEST_2, when picking-and-placing from one player to another without any rules being explained, then the average movement took 0.49 s (averaged over 50 movements). When modified to use the same start position, but to use the simple rules then the movement took an average of 0.46 s (averaged over 50 movements); saving 0.03 s per movement (6%) as show in Figure 9. For TEST_3, when picking-and-placing from the ground using the rules then the average movement took 0.63 s (averaged over 50 movements). When the move was repeated with arms outstretched, then the average movement took 0.74 s (averaged over 50 movements); an increase of 0.11 s per movement (17.5%) as shown in Figure 10. For TEST_4, when picking-and-placing from one player to another with arms outstretched, then the average movement took 0.52 s (averaged over 50 movements). When modified to use the same start position, but to use the simple rules, then the movement took an average of 0.45 s (averaged over 50 passes); saving 0.07 s per movement (13%) as shown in Figure 11.
Testing took place using body movements that are at the extremes of position and motion, so that most movements will save less time as they will not take place at the extremes. No detectable improvement (or change) in accuracy was measured.
Discussion
The two effects that were shown to dominate the simple dynamics (varying effect of θ2 and θ3 on waist rotation and the effect of θ3 upon θ2) were successfully used to create simple rules to improve the pick and place movement. The most important was to increase waist turning velocity and therefore make the pick and place action faster. Rugby coaches should therefore teach players to bend their arms, so that the ball (and therefore the centre of mass) quickly moves towards their centre of rotation during the picking and placing of the ball. The ball should be pulled into the body as quickly as possible for the first half of the movement (turn and/or lift) and then pushed out to the next player at the latest moment.
Methods for picking and placing balls are not usually considered by rugby coaches and when they are then techniques for ball passing are usually considered. This work demonstrates that picking and placing should be considered differently to the usual method of passing taught by rugby coaches, that is with arms outstretched to provide an acceleration through explosive action and a high final velocity as the ball leaves the hands in a pass.
Conclusions
Modelling of complex human joints usually requires elaborate biomechanical models, but simple upper limb models were used here by constraining models to the quick pick-and-place task. Models were developed using a method for calculating the simplified dynamics for an upper limb based on Lagrange. The simple model could mimic upper-limb behaviour during gross motions associated with picking-and-placing. Simple rules for improvement were developed and applied to adapt the motions for rugby players; effectively adding via-points which moved upper limb(s) through more profitable configurations.
The model was experimentally validated using a simple mechanical arm and the simple rules were experimentally validated using a series of human tests. Improvement was achieved. This suggested a suitable balance between accuracy, simplicity and feasibility. The simple rules were specific to picking-and-placing but simple models of limb dynamics may be able to produce other simple rules for improvement.
A new player technique (and therefore coaching method is suggested). The speed of rotating the waist can be increased by handing the ball slightly differently. If players initially bend their arms and then push them out as they hand-off, then the centre of mass moves towards their centre of rotation and that increases their speed of rotation. Small increases in rotational velocity can occasionally have a significant positive impact in a game as the ball can be handed-off before a tackle takes place and the ball can then be passed to the backs more quickly. That suggests that picking and placing should be considered differently to the usual method of passing taught by rugby coaches, that is usually with arms outstretched to provide an acceleration through explosive action and a high final velocity as the ball leaves the hands in a pass.
Work is moving on to consider improving the movement of disabled powered wheelchair drivers using simple rules derived from testing models of movement.37–39
Footnotes
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.