
Abstract
This study focuses on simultaneous scheduling, a crucial approach in modern manufacturing where multiple jobs are scheduled concurrently to optimize resource utilization and energy efficiency. In recent years, the focus on green manufacturing has intensified, yet challenges in energy efficiency within manufacturing workshops remain significant. This study explores the efficacy of the Particle Swarm Optimization (PSO) model, particularly the novel variant NvPSO and Walrus Optimisation Algorithm (WaOA) in addressing complex scheduling and energy minimization problems. By integrating both scheduling and energy optimization, the NvPSO model achieved a remarkable 9% reduction in total energy costs and a complete elimination of tardiness penalties.The study evaluates NvPSO's and WaOA performance using 13 diverse jobsets and benchmarks it against traditional algorithms, including the Artificial Immune System (AIS) and the Modified Genetic Tabu Algorithm (MGTA). Performance metrics such as Makespan, energy consumption, and processing time were assessed. NvPSO and WaOA demonstrated superior capability in reducing Makespan and energy consumption, particularly in larger and more complex instances. This variant of PSO, with its parameters adjusted using a logistic map, significantly outperforms the Walrus Optimization Algorithm (WaOA), which, while also effective, benefits from increased iterations and computational simplicity. Overall, the study highlights the effectiveness of NvPSO in optimizing scheduling and energy management, offering substantial cost savings and enhanced performance over traditional and alternative algorithms. The results underscore NvPSO's potential as a robust solution for green manufacturing challenges.
Introduction
Manufacturing environments are becoming increasingly complex, requiring innovative strategies to optimize production processes. A crucial element of this optimization is the efficient scheduling of machines, Automated Guided Vehicles (AGVs), and tools, with a concurrent emphasis on energy conservation for AGVs (Bruzzone et al., 2012). As industries strive for greater productivity and sustainability, the need for a comprehensive and integrated method for scheduling and resource management is increasingly apparent. Traditional manufacturing scheduling often treats machines and tools separately, leading to suboptimal resource utilization and potential bottlenecks. The inclusion of AGVs introduces further complexity, necessitating synchronization to prevent conflicts and ensure smooth material flow (Wu et al., 2023). Moreover, energy conservation for AGVs is an emerging concern as industries seek eco-friendly and cost-effective solutions.
Despite significant advancements in optimizing manufacturing processes, several research gaps persist in the simultaneous scheduling of machines, AGVs, and tools, particularly concerning energy conservation (Gahm et al., 2016). While studies have addressed the scheduling of machines and AGVs, the concurrent scheduling of machines, AGVs, and tools remains underexplored. Existing research often treats these components separately, leading to inefficiencies. Additionally, AGV energy consumption has not been sufficiently integrated into scheduling models, with most existing studies focusing on Makespan reduction rather than energy efficiency. Although multi-objective optimization models that consider both energy consumption and workstation efficiency are emerging, their practical applications remain limited. Furthermore, while novel metaheuristic algorithms such as the Walrus Optimization Algorithm (WaOA) have shown promise in solving optimization problems, their effectiveness in real-world manufacturing scheduling, particularly in energy-aware scenarios, is still in its early stages (Han et al., 2024). Current scheduling models also tend to be static, lacking the flexibility to adapt to real-time changes in production demands, machine availability, and energy pricing. Lastly, most studies focus on isolated performance metrics such as Makespan or energy consumption, rather than adopting a holistic approach that evaluates multiple indicators, including tool utilization, AGV routing efficiency, and overall system throughput.
Manufacturing environments are becoming increasingly complex, requiring innovative strategies to optimize production processes. A crucial element of this optimization is the efficient scheduling of machine, Automated Guided Vehicles (AGVs), and tools, with a concurrent emphasis on energy conservation for AGVs. As industries strive for greater productivity and sustainability, the need for a comprehensive and integrated method to scheduling and source management is increasingly apparent. Traditional manufacturing scheduling often treats machines and tools separately, leading to suboptimal resource utilization and potential bottlenecks. The inclusion of AGVs introduces further complexity, necessitating synchronization to prevent conflicts and ensure smooth material flow. Moreover, energy conservation for AGVs is an emerging concern as industries seek eco-friendly and cost-effective solutions. This research paper investigates the simultaneous scheduling of machines, AGVs, and tools, with a particular focus on energy conservation for AGVs. By addressing these elements together, we aim to develop an integrated scheduling framework that optimizes resource utilization, minimizes production downtime, and ensures efficient energy consumption. The study aims to the evolve landscape of smart manufacturing by proposing innovative methodologies and algorithms that support real-time decision-making in dynamic production environments. The challenges of simultaneous scheduling and energy conservation are multifaceted, involving intricate interdependencies between machines, AGVs, and tools. This necessitates advanced algorithms to balance conflicting objectives such as minimizing Makespan, reducing energy consumption, and optimizing tool usage. This research seeks to address these challenges and provide practical insights for industries aiming to enhance their manufacturing processes. Through a combination of theoretical models, simulation studies, and practical implementations, we aim to lay the groundwork for a more holistic and intelligent approach to manufacturing scheduling. The outcomes of this research have the potential to significantly impact industries by improving operational efficiency, reducing costs, and promoting sustainable manufacturing practices.
Literature Review
In the realm of concurrent scheduling encompassing machine, Automated Guided Vehicles (AGVs), tool management, and energy conservation, several researchers have made significant contributions to the field. In (Nageswararao et al., 2015), Nageswararao, M et al. proposed three nature inspired algorithms for joint jobs, machines, and tools scheduling, with the FPA algorithm outperforming others. In (Özpeynirci, 2015) Özpeynirci, S et al. emphasized that the efficient operation of Automated Guided Vehicles (AGVs) is vital for enhancing the efficiency of Flexible Manufacturing Systems (FMS). Task scheduling is a critical component of AGV implementation, contributing to improved productivity, reduced delivery costs, and optimal utilization of the entire AGV fleet. They introduced a Hybrid Genetic Vehicle Heuristic Algorithm (HGVHA) that addresses the concurrent arrangement of machines and AGVs, aiming to reduce both Makespan and mean tardiness. In (Reddy & Rao, 2011) Reddy et al. also developed a mathematical framework that incorporates time indices to optimize the scheduling of machines and tools within an FMS, and the primary goal is to minimize Makespan. In (Pena et al., 2016) Pena, et al. introduced a blend of a hybrid Genetic Algorithm (GA) and improved local search to arrange tasks on multiple parallel machines, considering tool changes prompted by wear. In (Beezão et al., 2016) Beezão, A et al. addressed Makespan optimisation on parallel machines subject to tooling imitations using an adjustable large neighborhood search metaheuristic In (Baykasoglu & Ozsoydan, 2017) Baykasoglu, et al. addressed the challenges of automatic tool changers and tool changes in automated machining centers, utilizing a simulated annealing algorithm. In (Paiva & Carvalho, 2017) Paiva, et al. explored job organization and tool-changing issues using graph-based methods, heuristics, and local search techniques. In (Gökgür et al., 2017) Gökgür, et al. used constraint programming models for tool scheduling and allocation in parallel machine environments, focusing on minimizing Makespan with predefined tool quantities. In (Reddy et al., 2018) Reddy, et al. applied a Cuckoo Search Algorithm (CSA) to optimize machine and tool scheduling in a multi-machine flexible manufacturing system (MMFMS), targeting Makespan reduction.
In (Mareddy et al., 2022) Mareddy et al. proposed nature-inspired algorithms for scheduling machines and tools in MMFMS, with the Flower Pollination Algorithm (FPA) showing strong performance. They also developed a mixed integer nonlinear programming (MINLP) model that incorporated alternate machine options for more flexible scheduling. The authors introduced the Symbiotic Organism Search Algorithm (SOSA), which simulates natural symbiotic relationships to solve complex scheduling challenges involving machines and tools.
In (Garg et al., 2022) Garg et al. introduced an Adaptive Exploration Robotic Particle Swarm Optimization (AERPSO) for efficient multi-target exploration by autonomous robots, demonstrating superior search time and detection rates compared to existing methods. In (Wu et al., 2023) Wu et al. presented a hybrid Particle Swarm Optimization (PSO) approach combined with the Surprisingly Popular Algorithm (SPA) and adaptive Euclidean distance-based topology to improve performance in large-scale heterogeneous population problems. In (Amirteimoori et al., 2022) Amirteimoori et al. proposed a Mixed-Integer Linear Programming (MILP) model for simultaneous job and transporter scheduling in flexible flow shop systems. They used a Parallel PSO-GA (Genetic Algorithm) approach, which showed improvements in both solution quality and computational efficiency, leveraging parallel computing. In (Bruzzone et al., 2012) Bruzzone et al. introduced Energy-Aware Scheduling (EAS) for manufacturing, using a mathematical model to optimize energy consumption while maintaining job sequences. In (Dai et al., 2019) Dai et al. developed a multi-objective optimization model for flexible job shop scheduling, minimizing both Makespan and energy usage, using an enhanced genetic algorithm. Similarly, In (Fang & Lin, 2013) Fang et al. tackled scheduling in multi-machine systems with adjustable processing speeds, aiming to minimize weighted job tardiness and energy consumption. They developed heuristic and PSO-based solutions, evaluated in computational studies. In (Gahm et al., 2016) Gahm et al. proposed a framework for energy-efficient scheduling (EES) covering energy supply, demand, and consumption.
In (Trojovský & Dehghani, 2023) Trojovský et al. introduced the Walrus Optimization Algorithm (WaOA), with distinct exploration, migration, and exploitation phases, showing strong performance on benchmark tests. In (Fahmy et al., 2024) Fahmy et al. applied WaOA to lithium-ion battery (LIB) modeling, optimizing resistance-capacitance (RC) networks for accurate voltage estimations. In (Han et al., 2024) Han et al. further tested the Walrus Optimizer (WO) on standard benchmarks and engineering problems, demonstrating stability and strong performance. In (Hasanien et al., 2024) Hasanien et al. proposed the Enhanced Walrus Optimization (EWO) for solving the Probabilistic Optimal Power Flow (POPF) problem in power grids, ensuring reliability and cost minimization with renewable energy integration.In (Tang et al., 2016) Tang et al. proposed improved Particle Swarm Optimization (PSO) that have been adopted to achieve Pareto-optimal solutions, optimizing both makespan and energy consumption. Similarly, In (Sayah et al., 2024) Sayah et al. proposed energy-efficient scheduling in Distributed Permutation Flow-Shop Manufacturing Problems (DPFSMP) where Nawaz Enscore and Ham (NEH)-based and Greedy Random Adaptive Search Procedure (GRASP)-based algorithms, with NEH demonstrates superior performance.
In (Mokhtari & Hasani, 2017) Mokhtari et al. used multi-objective optimization models incorporating total completion time, system availability, and energy cost minimization have been developed. Enhanced evolutionary algorithms with global criteria methods have shown promising results in optimizing these objectives. Additionally, in (Ding et al., 2021) Ding et al. proposed a hybrid PSO (HPSO) algorithm integrating multi-objective tabu search and crossover techniques for flexible flow shop scheduling under time-of-use (TOU) electricity pricing. These approaches effectively reduce both total tardiness and power costs while improving computational efficiency.
In this study (Nejjarou et al., 2024) Nejjarou et al. modelled a Flexible Shop Scheduling Problem with Sequence-Dependent Setup Times, aiming to minimize energy consumption using Artificial Bee Colony and Migrating Birds Optimization algorithms, followed by a detailed comparative analysis.In this paper (Yu et al., 2024) Yu et al. proposed a Knowledge-Guided Bi-Population Evolutionary Algorithm (KBEA) for distributed flexible job shop scheduling, optimizing makespan and energy use through adaptive operators and knowledge-based strategies, outperforming seven benchmark algorithms. In this study (Duan et al., 2024) Yu et al. introduced a genetic programming hyper-heuristic to tackle dynamic hybrid flow shop scheduling under machine breakdowns and random job arrivals, effectively generating adaptive scheduling rules to minimize tardiness, idle energy, and makespan.
In this paper, we effectively applied a novel variant of Particle Swarm Optimization (PSO), named NvPSO, to optimize the scheduling of Automated Guided Vehicles (AGVs), machine tools, and energy consumption. The NvPSO approach enhances the swarm leader's position using Gaussian distribution, which broadens the search space and allows for a wider range of potential solutions. To improve the worst-performing solutions, Differential Evolution (DE) and mirroring schemes were used, helping these solutions escape local optima and improving overall solution quality. We refined particle position updates by incorporating rectified personal and global best signals, which enhanced optimization accuracy. Additionally, chaotic inertia weights and dynamic switching probabilities were used to balance global and local search operations effectively. A spiral-based local exploitation approach was employed to fine-tune solutions and enhance local search capabilities.
Furthermore, we compared the NvPSO results with those from the Walrus Optimization Algorithm (WaOA), a novel, efficient optimization method. In WaOA, migration behavior was used to explore diverse scheduling options, feeding behavior to focus on and refine the best solutions, and escaping behavior to avoid local optima. WaOA also incorporated spiral-based local exploitation and Gaussian distribution to enhance leader positions, along with mutation strategies to improve weaker solutions. These combined strategies in both methods significantly improved the efficiency of scheduling AGVs and machine tools while minimizing energy consumption.
Problem Overview
In simultaneous scheduling, the focus is on jobs, machines, tools, and Automated Guided Vehicles (AGVs). The processing time for each operation of every job is predetermined, and each operation can be performed on at least one machine. To enable processing, an AGV is required to transport each job to the designated machine, with transportation time depending on the chosen route and path. Initially, all jobs and AGVs start from the warehouse. Within the framework of the Multi-Objective Green Scheduling Problem, four interconnected sub-problems must be optimized concurrently.
Machine Assignment (MA): Designating a processing machine for each operation.
Operation Sequence (OS): Establishing the order of operations for each machine.
AGV Selection: Choosing an AGV for each operation.
Task Sequence (TS): Arranging the sequence of transportation tasks for each AGV.
The goal is to simultaneously minimize Makespan and total energy consumption. The problem is guided by several assumptions:
All jobs and machines are available from the start.
Each machine can handle only one operation at a time.
Operations cannot be preempted.
Precedence relationships are only applicable within the same job.
Load and unload times are included in the transportation time.
Each AGV transports only one operation at a time.
The test scenarios are created based on 10 sets of jobs and involve four matrices representing travel times. As a result, a total of 82 problems have been generated following the specifications outlined by Bilge and Ulusoy (1995). It's important to note that, unlike the original problem by Bilge and Ulusoy, the present study incorporates data related to machining tools.
In a manufacturing setting, the efficiency of material transportation is measured by Total Energy Consumption (TEC), which is based on total transportation time and the average power needed for material handling equipment. This measure is significantly affected by the design of material flow, which governs how jobs progress through the shop floor according to the scheduling. In simultaneous scheduling, each job set includes multiple operations, with each operation needing to be performed on a specific machine selected from several options. The scheduling process involves assigning operations to machines (operations assignment) and determining the order of operations for each machine (operations sequence). These assignments and sequences greatly influence material flow. Furthermore, the arrangement of machines and their locations is vital to efficient material flow, as it seeks to minimize the distance and time jobs spend moving between machines. Consequently, the interplay between scheduling and layout collectively impacts material flow and the corresponding transportation TEC.
This study introduces three machine modes to model machine Total Energy Consumption (TEC): processing mode, brief dormant mode, and extended dormant mode. The processing mode occurs when a machine is actively engaged in a job, with specific processing times and power determined by the scheduling. The layout, which is closely linked to scheduling through transportation time, also influences the machine's processing mode. Machines switch to extended dormant mode if the idle time between consecutive job operations exceeds a certain threshold; otherwise, they remain in brief dormant mode. Dormant time refers to the interval when a machine is not in operation and is waiting for a new job. The assignments and sequences of operations, managed during scheduling, dictate when jobs start and finish on the machine. Additionally, transportation time—shaped by both scheduling and layout—affects the start time of a process. Essentially, scheduling and layout together determine the different dormant states a machine can experience, each inquiring varying amounts of power (See Figure 1).
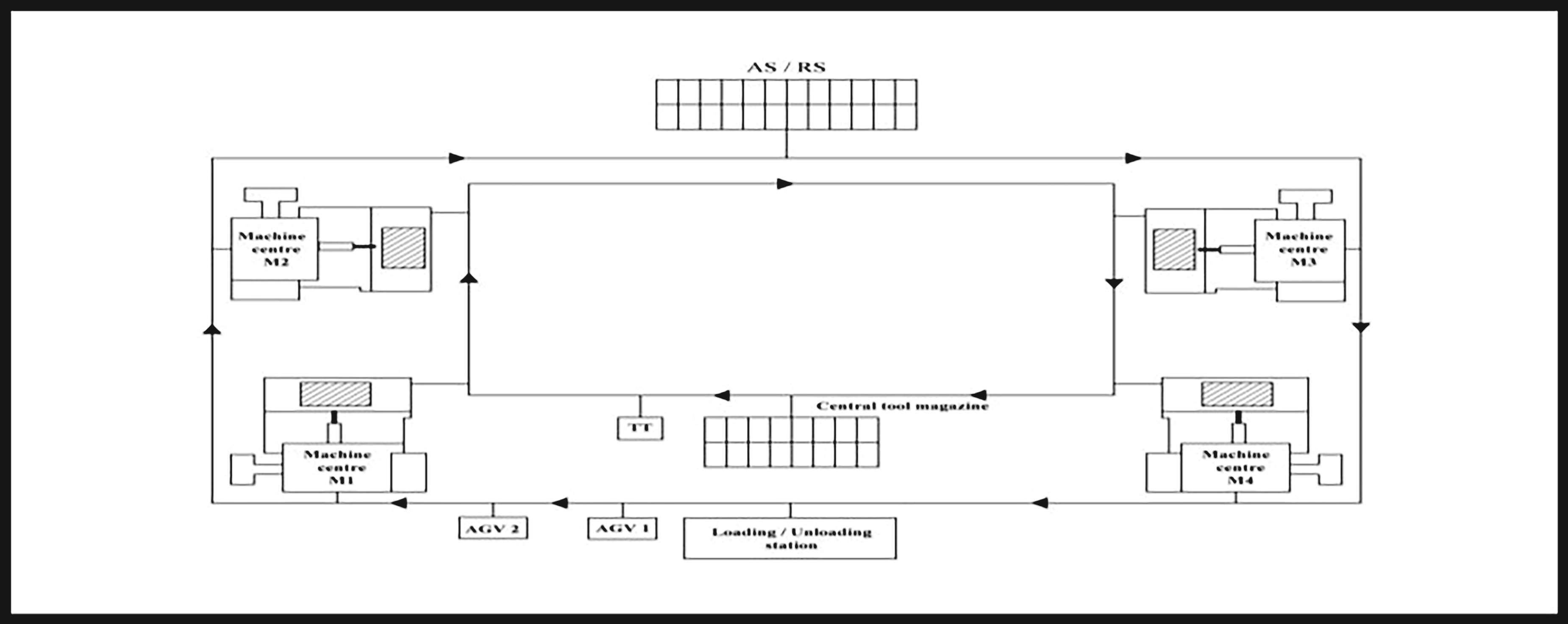
Layout of Machine, AGV and aS/RS.
The interaction between transportation and processing tasks, particularly the sequencing of transportation tasks on AGVs and tools adds complexity to the problem. The challenge intensifies when the number of AGVs exceeds one due to need to assign transportation tasks among AGVs.
Each machine handles only one operation at a time and cannot be interrupted once it starts processing. A machine begins its operation as soon as it becomes available, as long as there is a new job ready to be processed. The power consumption of the machine in the extended dormant mode is lower than that in the brief dormant mode. Each machine is associated with a single designated location. The distances between these locations are pre-established.
Index of jobs
Index of operations for job a
Index of machines
Index of processes on machine
Index of location
Index of modes of AGV i.e 1: processing mode, 2: brief dormant mode, 3: extended dormant mode
Tardiness penalty of job j per unit time (cents/min)
Energy cost per unit time (cents/(W-min))
is a symbol indicating Watts, which is the unit of power
Distance between locations I and I (meter)
Due date of job j (min)
Processing time of operation i of job j on machine m (min)
Time threshold of machine m (min)
Transportation time of job j per unit distance (min/meter)
if operation i of job j can be processed on machine m; 0 otherwise (ajj.m is 1 if tij.m > 0; 0 otherwise)
Power of processing operation i of job j on machine m in states = 1 (W)
Power of machine m in idle states = 2 or s = 3 (W)
Average power of transportation equipment (W)
A big positive number
if machine e is assigned to location l; 0 otherwise
if it operation of job a is processed at d’ process of machine c
Decision variables













In this study, we introduced a novel variant of Particle Swarm Optimization (NvPSO) to overcome key challenges in the traditional PSO model, specifically premature convergence and inadequate local exploration of near-optimal solutions. This variant employs four primary strategies: enhancing the swarm leader using Gaussian distribution, improving the worst-performing solutions through Differential Evolution (DE) and mirroring techniques, modifying the position update mechanism with improved personal and global best signals, and integrating a spiral-based approach for local exploitation. Together, these strategies boost population diversity and search efficiency, significantly increasing the chances of achieving global optimality compared to the standard PSO algorithm. Notably, this variant utilizes refined forms of personal and global best signals, a chaotic inertia weight, and dynamic switching probabilities to balance global and local search operations. Additionally, it incorporates Gaussian distribution for enhancing swarm leaders and mutation strategies to strengthen weaker particles. These enhancements work together to mitigate the risk of getting trapped in local optima and enhance overall optimization performance.
Particle Swarm Optimization
A Method to Augment the Swarm Leader
In the realm of scheduling, the removal of ideal time and the inclusion of conflicting attributes can significantly impact classification performance. To cater this, we propose a mechanism to enhance the swarm leader, gbest, using skewed Gaussian distributions. This approach aims to endow gbest with enhanced discriminative capabilities, helping it navigate through local optima challenges(Jordehi, 2015). The mutation of gbest is performed successively using three Gaussian distributions with varying skewness settings, as expressed in equation (14). Specifically, a right-skewed distribution is employed to potentially eliminate longer Makespan, while a left-skewed distribution is more inclined to include discriminative Makespan. Additionally, a standard Gaussian distribution, without skewness, is utilized for local exploitation of gbest while maintaining neutrality.(Yang, 2014)

In this context, gbestb ‘signifies the improved global best solution. The parameter “
In this context, gbestb represents the enhanced global best solution. The parameter “
We enhance the weaker particles in the swarm using a two-step approach that includes mirroring mutation applied to the swarm leader and a Differential Evolution (DE)-based operation for local elite solutions. First, we implement a gbest-based local mutation strategy, described in equation (15), which creates a new particle by applying mirroring effects and reversing the sign of gbest, influenced by a mutation probability, rmu, in each dimension. This process simulates the random activation or deactivation of specific features based on the current optimal feature subset indicated by gbest. Essentially, the gbest-based local mutation strategy maintains a balance between retaining valuable information from the gbest solution and introducing stochastic variations to stimulate new progress in the resulting solution. Similar mirroring methods have been effectively utilized in previous research (Yang, 2014) to boost population diversity.

The mutation probability, denoted as μm and set to 0.8 based on trial and error and insights from related research (Jordehi, 2015), governs the creation of a new offspring. Specifically, if a randomly generated value is greater than or equal to μm, offspring takes on reflecting value from the gbest solution in the dth dimension; otherwise, it adopts value from the gbest solution in that dimension. This mechanism aims to produce a new offspring that could potentially replace the worst-performing particle in the swarm if it demonstrates better performance. Additionally, a Differential Evolution (DE)-based strategy is employed to enhance the second and third weakest individuals in the swarm. This method generates new particles using DE's mutation and crossover operations, leveraging three randomly selected pbest solutions from the pool of all pbest individuals in the swarm, as outlined in Equations (16) and (17). The differential weight, F, in Equation (16) is generated using a Sinusoidal chaotic map to introduce diverse perturbations for the donor vector,


In the dth dimension,
The newly generated solution is accepted immediately if it demonstrates greater fitness. However, a less fit mutated solution is accepted based on an annealing schedule outlined in Equation (18). In this equation, \(T\) denotes the temperature that regulates the annealing process, while \(f\) represents the fitness difference between the mutated and original solutions. A random value within the range of [0, 1] is also included as a constant. A linear cooling schedule is used to gradually lower the temperature, where T is multiplied by 0.9, as noted in (Jordehi, 2015). Both mutation processes, based on DE and gbest mirroring, run simultaneously to improve the weaker particles within the swarm.

To tackle stagnation issues in the original PSO model, we introduced two new search mechanisms: a modified PSO search strategy and an intensified spiral exploitation approach. These strategies aim to enhance both diversification and intensification. We also implement a dynamic switching probability schedule to effectively balance these strategies, maximising both search operations’ advantages.
First, we improve the position updating strategy of the original PSO by incorporating enhanced personal best (pbest) and global best (gbest) values, along with the Logistic chaotic map, to boost search diversity. In equation (19), we refine the gbest experience by averaging the positions of the current gbest solution and a neighboring superior pbest solution, which we refer to as pbest. This pbest is selected based on its dissimilarity to gbest, measured by counting the number of distinct units in their binary representations. Essentially, pbest is chosen as the solution that shares the fewest features with gbest. Equation (20) improves the local best experience by averaging the particle's pbest with another randomly selected superior pbest solution, labelled as pbestR, from its neighborhood. Equation (21) then governs the position updating process, utilizing the enhanced global and local optimal signals defined in equations (19) and (20).



We introduce an enhanced method for spiral exploitation aimed at addressing the fine-tuning limitations of the original PSO algorithm, particularly in the vicinity of optimal regions. This approach employs a logarithmic spiral search, inspired by the MFO algorithm, to refine the positions of swarm particles during the final iterations. By constructing a hyper-ellipse search space around the global best (gbest) using the spiral function ((22) and (23)), the local search around near-optimal solutions is greatly enhanced. In this framework, D represents the distance between gbest and particle i in the dth dimension, b is a constant that defines the shape of the logarithmic spiral, and l is a random value within the range of [−1, 1]. Furthermore, a dynamic switching probability schedule (equation (24)) is introduced to balance global exploration and local exploitation in this model. Switching probability, pswitch, is calculated based on the current iteration (iter) relative to the maximum iterations (Max_iter). During each iteration, if pswitch is greater than a randomly generated value between [0, 1] (i.e., pswitch > rand), the modified PSO operation takes place; otherwise, the spiral search is executed. This dynamic approach ensures sufficient global exploration in the early stages to locate promising regions, while also enabling thorough exploitation around near-optimal solutions as the process converges in the final iterations.



By using these initialization and parameter settings, NvPSO can effectively balance exploration and exploitation, leading to improved convergence performance.

The walrus, a marine mammal found in Arctic and subarctic waters, exhibits distinct behaviours including foraging guided by individuals with the longest tusks, migration to rocky beaches during warmer weather, and strategic responses to predators like polar bears and killer whales(Trojovský & Dehghani, 2023). These behaviours serve as a stimulus for the development of the Walrus Optimization Algorithm (WaOA). WaOA utilizes principles such as guided foraging, migration towards diverse destinations, and adaptive responses to threats, aiming to enhance global search and prevent premature convergence in optimization processes.
The Walrus Optimization Algorithm (WaOA) is a population-based optimization method in which the individuals are represented by walruses, each symbolizing a potential solution to optimization problem. In WaOA, the position of each walrus in the exploration space corresponds to the values of the problem variables, effectively turning each walrus into a vector. These walruses are organized into a matrix referred to as the population matrix. At the start of the WaOA implementation, this population matrix is generated randomly to kick off the algorithm.
In the matrix Y, each row Yi signifies a walrus, serving as a potential solution to the problem, with Yi,j representing the j th decision variable's value recommended by that walrus. The objective function, calculated based on these values, yields an objective function vector (F), where (Fi) denotes the value obtained from i-th walrus.

These objective function values are pivotal for assessing solution quality. The walrus corresponding to the best value is termed best member, while one with poorest value is the worst member. By each iteration, as objective function values are updated, so too are the identities of the best and worst members.


The WaOA is mathematically modelled in three phases, mirroring the natural behaviours of walruses. The first phase, akin to the feeding strategy of walruses, focuses on exploration. Walruses, with their varied diet, predominantly target benthic bivalve mollusks, and clams, by foraging around sea level guided by the strongest member with the longest tusks. Similarly, in WaOA, the solution with the finest objective function value serves as strongest walrus, guiding others to discover different areas of the search space. The algorithm updates walruses’ positions based on this guidance, aiming to enhance global exploration. This process is mathematically expressed through equations (27) and (28), where a new position is created and replaces the previous one if it results in an enhancement of the objective function value.


In the first phase, the Walrus Optimization Algorithm (WaOA) updates the positions of walruses to enhance exploration. New positions 


In this context,
The parameter values for the model are established as follows:
Index of modes of AGV i.e
processing mode, brief dormant mode, extended dormant mode The average power for AGV is supposed to be 700 W. The time threshold for all machines (m) is assumed to be 0.2 min. The energy unit cost Ce is assumed to be 20 cents per kilowatt-hour. The brief dormant mode (s = 2), the machine power PDIm,2 is randomly generated using the uniform distribution U[300, 600] in Watts (W). The extended dormant mode (s = 3), the power for all machines PDIm,3 is assumed to be zero W. The job tardiness penalties Cj are also randomly generated, with U[20, 30] in cents. Machining of same material is considered for both algorithms to reduce the complexity.
Results and Discussions
To assess the efficiency of proposed PSO models for scheduling and energy minimization, we utilize a set of 13 diverse Jobsets. These datasets are designed to present a variety of challenges due to their differing dimensionalities and complexities, making them suiTable for testing the robustness of our approach in simultaneous scheduling tasks. The experiments were conducted on a system equipped with an Intel i7– 12,700 K processor running at 3.6 GHz, 16 GB DDR4 RAM, and an NVIDIA RTX 3090 GPU (). The implementation was carried out using MATLAB R2022b, utilizing libraries such as NumPy, SciPy, and TensorFlow (if required). The operating system used 04. This computational setup ensures consistency and facilitates the reproducibility of the proposed NvPSO algorithm. We assessed the performance of these PSO variants using three key metrics: Makespan, energy consumption, and comprehensive statistical analysis.For comparative purposes, we benchmark our PSO variants against two traditional search algorithms: Artificial Immune System (AIS) and Modified Genetic Tabu Algorithm (MGTA). To guarantee unbiased comparison, all methods are evaluated under the same stopping criterion, which is determined by the Makespan evaluations. In our experiments, we have adjusted both the population size and the maximum number of iterations to appropriately match the complexity of the problem and the capabilities of the comparison algorithms.
Parameter Settings
The WaOA was executed in twenty independent runs, with each run consisting of a thousand iterations (T = 1000). In this study, the parameter N is set to 20 for the WaOA. Thus, taking into account the computational complexity, the total number of function evaluations for each metaheuristic algorithm amounts to 60,000. To validate we solved a small problem using the MATLAB solver. This case study involved four machines and 13 jobsets each requiring 3–4 operations. The distances between locations are provided in Table 1, with additional details in Table 2. The effectiveness of NvPSO in minimizing the objective function was assessed by comparing its outcomes with those WaOA. Consequently, equations (2) and (3), which govern the machine layout in the integrated model, are excluded from the non-integrated models formulation.
Transportation Time.
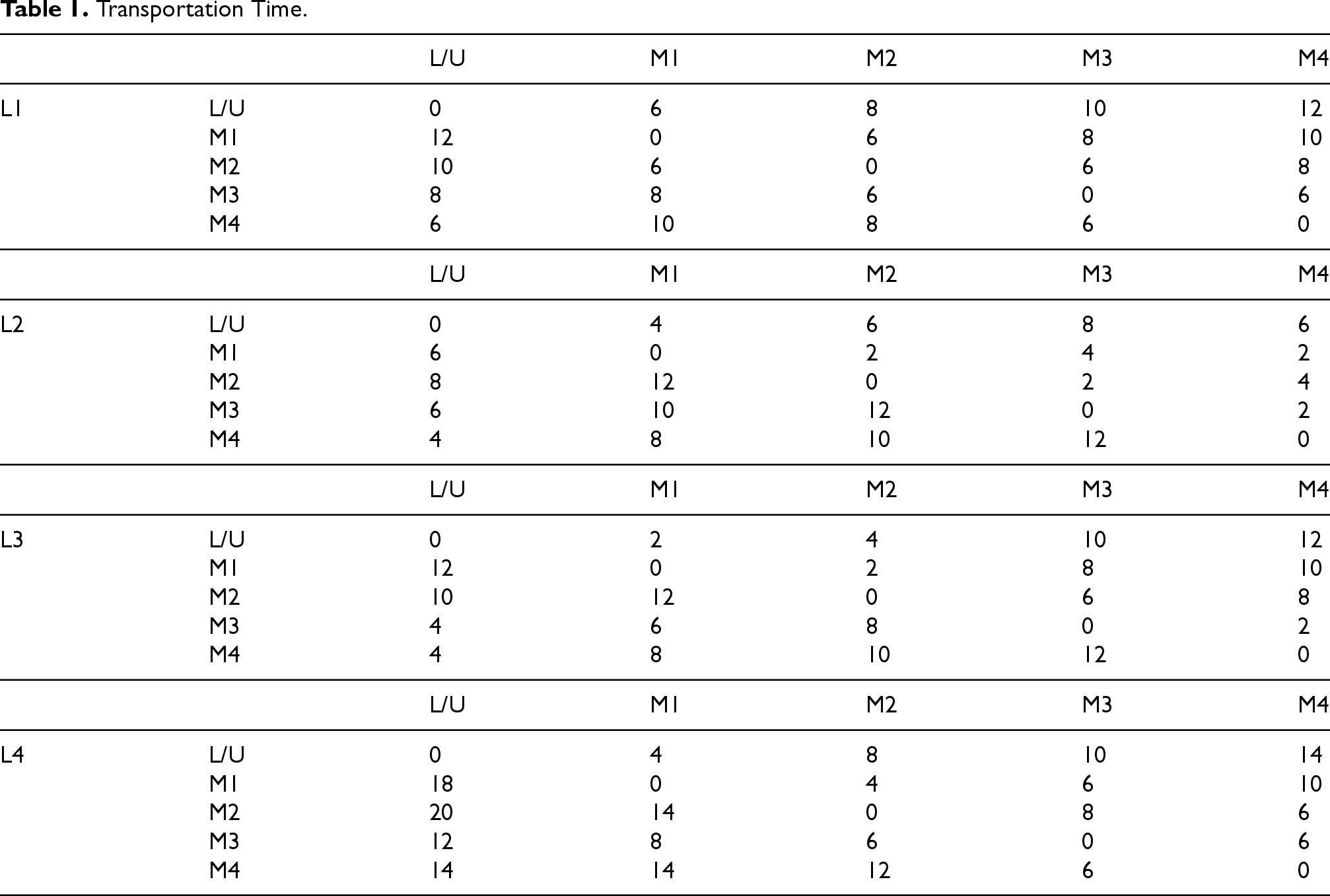
Transportation Time.
Processing Time.

A comparative analysis of the algorithms revealed that NvPSO consistently outperforms the others in minimizing Makespan. While WaOA also delivers promising results, its effectiveness improves significantly with an increased number of iterations, which requires additional time. Despite being less complex than NvPSO, WaO shows potential, especially in scenarios where computational simplicity is a priority (See Figure 2).

Comparative analysis of an algorithm for 22 Jobsets.
However, the difference in Makespan becomes particularly pronounced with larger Jobsets, where NvPSO's superior performance leads to a substantial reduction in overall processing time. This decrease in processing time not only lowers tardiness but also results in significant cost savings.The results showed that NvPSO and WaO satisfy all necessary equations and constraints, confirming its feasibility. This adjustment led to significantly different processing sequences on each machine, as illustrated by the Gantt charts in Figures 3 and 4. The completion times for each job were reduced in the model.
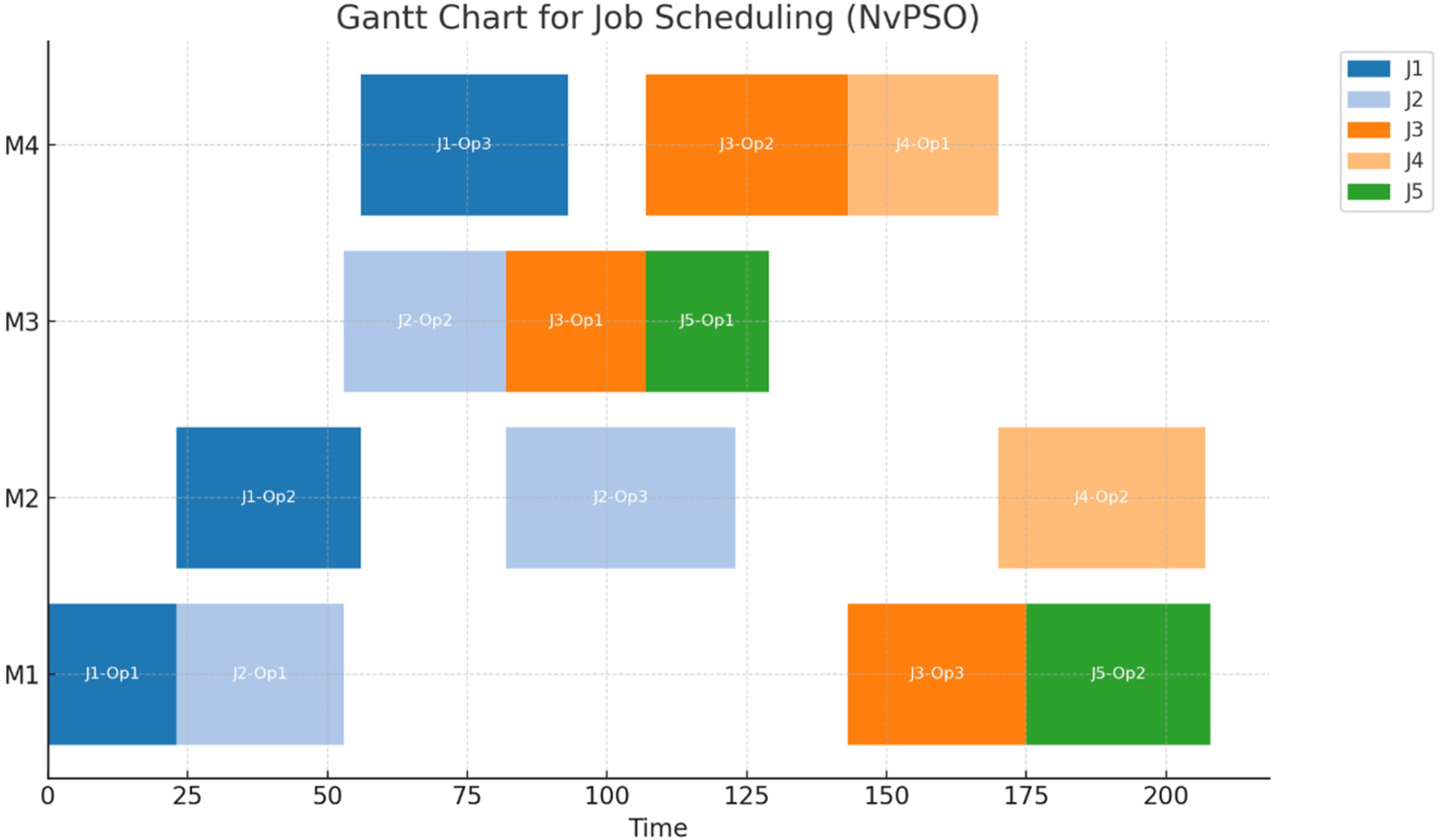
Gantt Chart of Scheduling Using NvPSO.
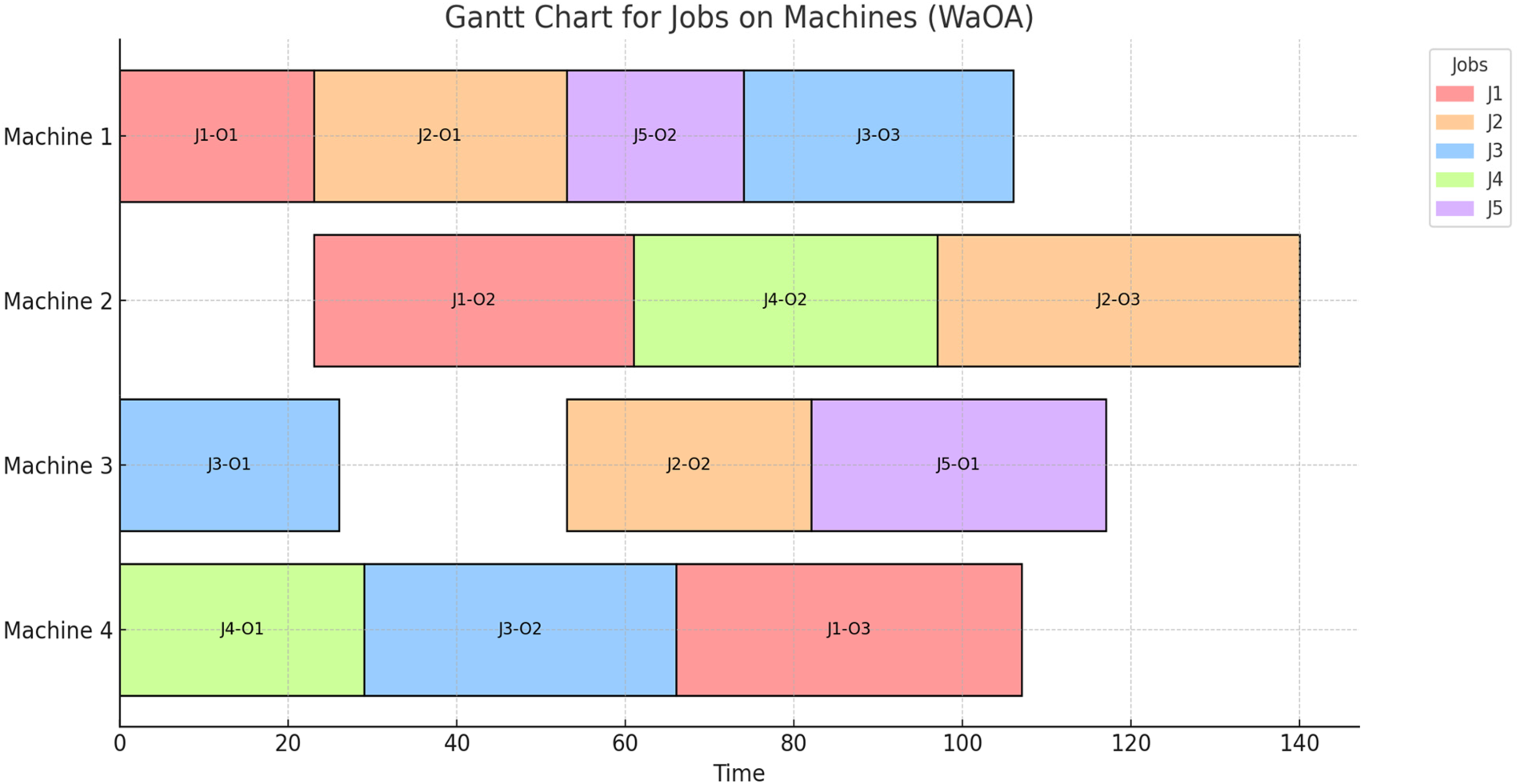
Gantt chart of scheduling using WaOA.
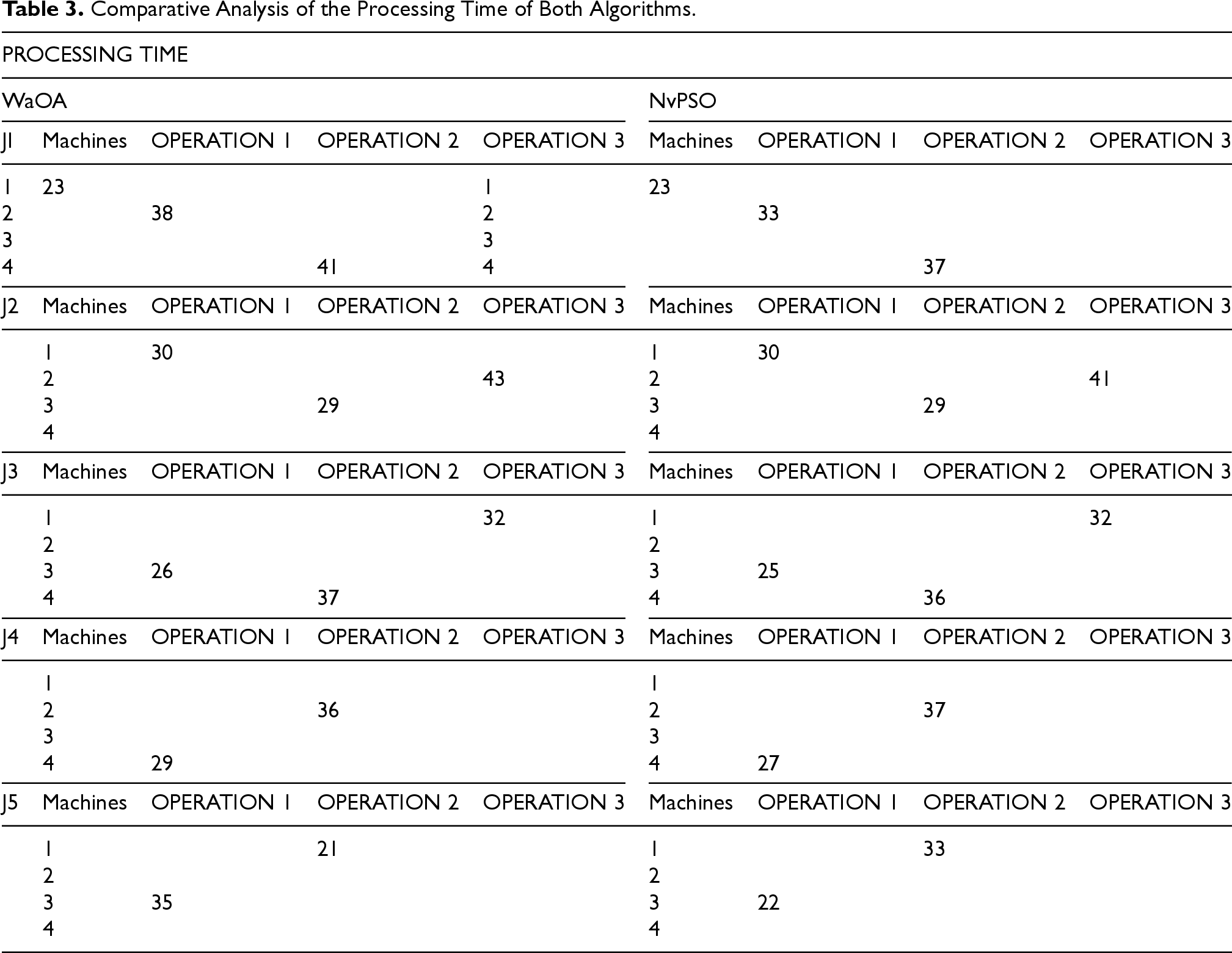
By optimizing both scheduling and machine layout, the integrated model provided enhanced flexibility, resulting in a reduction of total energy costs by approximately 9% and a 100% decrease in tardiness penalties (See Table 3).
Comparative Analysis of the Processing Time of Both Algorithms.
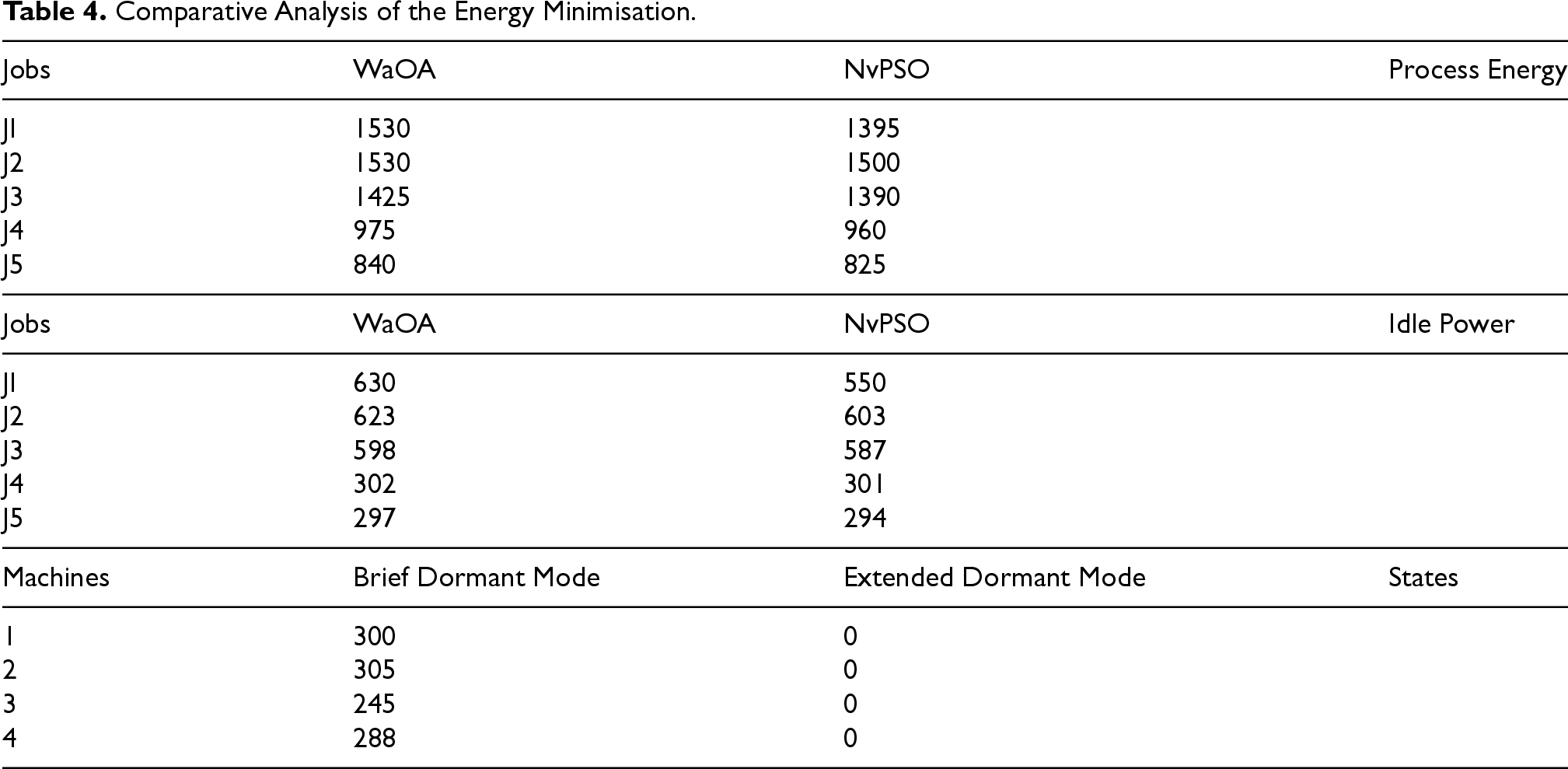
The Table provides a detailed breakdown of energy consumption and operational states for different jobs and machines in a production environment. Job J1 consumes 1530 units of energy during active operations and 1395 units during non-value-adding operations. This suggests that while the job is energy-intensive during active processing, it also has significant energy use in supportive operations.Job J5 has the lowest energy consumption, with 840 units during active operations and 825 units during non-value-adding operations, indicating that both operational phases consume nearly the same amount of energy (See Table 4).
Energy Inefficiencies in Non-Value-Adding Operations: For many jobs, such as J1, the energy consumed in NvPSO is nearly as high as during active operations (WaOA). This suggests that there may be room for improvement in reducing these non-essential energy costs. Idle Power Consumption: Some machines consume a considerable amount of energy even when idle, as seen with the machines handling J1 and J2. Strategies such as implementing better power management or reducing idle times could lead to significant energy savings. Dormant Mode Management: The machines show zero energy consumption in Extended Dormant Mode, indicating effective energy management when machines are not used for extended periods. However, there's still energy use in Brief Dormant Mode, which might be optimized further.
Comparative Analysis of the Energy Minimisation.
The Table presents data on various job sets, analyzing their energy consumption in different operational states (WaOA and NvPSO) and assessing their performance through additional metrics such as AIS (Average Index Score), Mean, Standard Deviation (St.Dev), and ranking based on deviations from these values. The analysis of the Table 5 is as follows :
Statistical Analysis of Both Algorithms.

Statistical Analysis of Both Algorithms.
Both the NvPSO and WaOA have proven effective in simultaneous scheduling and energy minimization. To further validate their efficacy, we applied these algorithms to flexible job shop scheduling (FJSS), a more complex scenario where jobs can be processed on multiple machines. This added flexibility augments the complexity of scheduling process, as it necessitates optimizing multiple objectives, such as minimizing Makespan and energy consumption. We tested NvPSO and WaOA on well-known benchmark problems in FJSS, which are standard in the research community for evaluating scheduling algorithms. The results showed that both algorithms could efficiently find high-quality solutions, effectively handling the complexities of FJSS while balancing scheduling efficiency and energy minimization. This demonstrates their robustness and adaptability, highlighting their potential for use in various industrial applications where flexible job shop scheduling is essential.
Statistical Evidence for Method Comparison
To assess the performance of the NvPSO and WaOA algorithms, a comprehensive set of experiments was conducted using 13 diverse Jobsets, with a focus on flexible job shop scheduling (FJSS) problems. The comparison was based on three key performance metrics: Makespan, energy consumption, and idle power consumption. The results indicate that NvPSO consistently outperformed WaOA in both scheduling and energy minimization.
For example, in Job Set J1, NvPSO reduced the process energy from 1530 units (WaOA) to 1395 units and lowered the idle power consumption from 630 units (WaOA) to 550 units. Similarly, in Job Set J5, NvPSO demonstrated superior energy efficiency with 825 units compared to 840 units in WaOA. These improvements were observed across the board, with NvPSO achieving a significant reduction in energy consumption and idle power.
Statistical analysis further confirmed the superiority of NvPSO. The mean energy consumption and standard deviation values for NvPSO were consistently lower than for WaOA, highlighting not only its better performance in energy efficiency but also its greater consistency and robustness. The total energy cost was reduced by approximately 9%, and the tardiness penalties were completely eliminated using NvPSO. Moreover, ranking deviations and AIS scores indicated that NvPSO performed more efficiently in managing non-value-adding operations and idle power consumption, areas where WaOA showed less effectiveness.
The results of these experiments demonstrate that NvPSO is a more effective approach for simultaneously addressing scheduling and energy optimization, particularly in complex, flexible manufacturing environments where energy efficiency is critical. In contrast, while WaOA showed promising results, its performance was less sTable, and it required more iterations to achieve comparable outcomes, making it less suiTable for real-time applications.
Test Instance -Kacem
The data for Test Instance 1 is sourced from Kacem et al. (2002), comprising five problem instances. Four cases have job-to-machine sizes of KA1: 4 × 5, KA2: 10 × 7, KA3: 10 × 10, and KA4: 15 × 10, all of which exhibit total operation flexibility. The fifth instance, KA5, involves 8 jobs and 8 machines with partial flexibility.
Performance Comparison of WaOA with NVPSO
This section presents a performance comparison between WaOA and NVPSO, alongside other metaheuristics from the literature that have addressed the Kacem problem instances. Table summarises the results of the comparison between NVPSO and HAdFA. The first column details the problem type, with ‘n’ jobs and ‘m’ machines. The objectives evaluated include. NVPSO consistently outperforms across all WaOA instances, particularly in large-scale problems, due to its adaptive parameter strategy, which enhances its performance over NVPSO. The computational time for both algorithms shows minimal variation; however, even a few seconds can make a significant difference in real-time complex scenarios (See Figure 5).
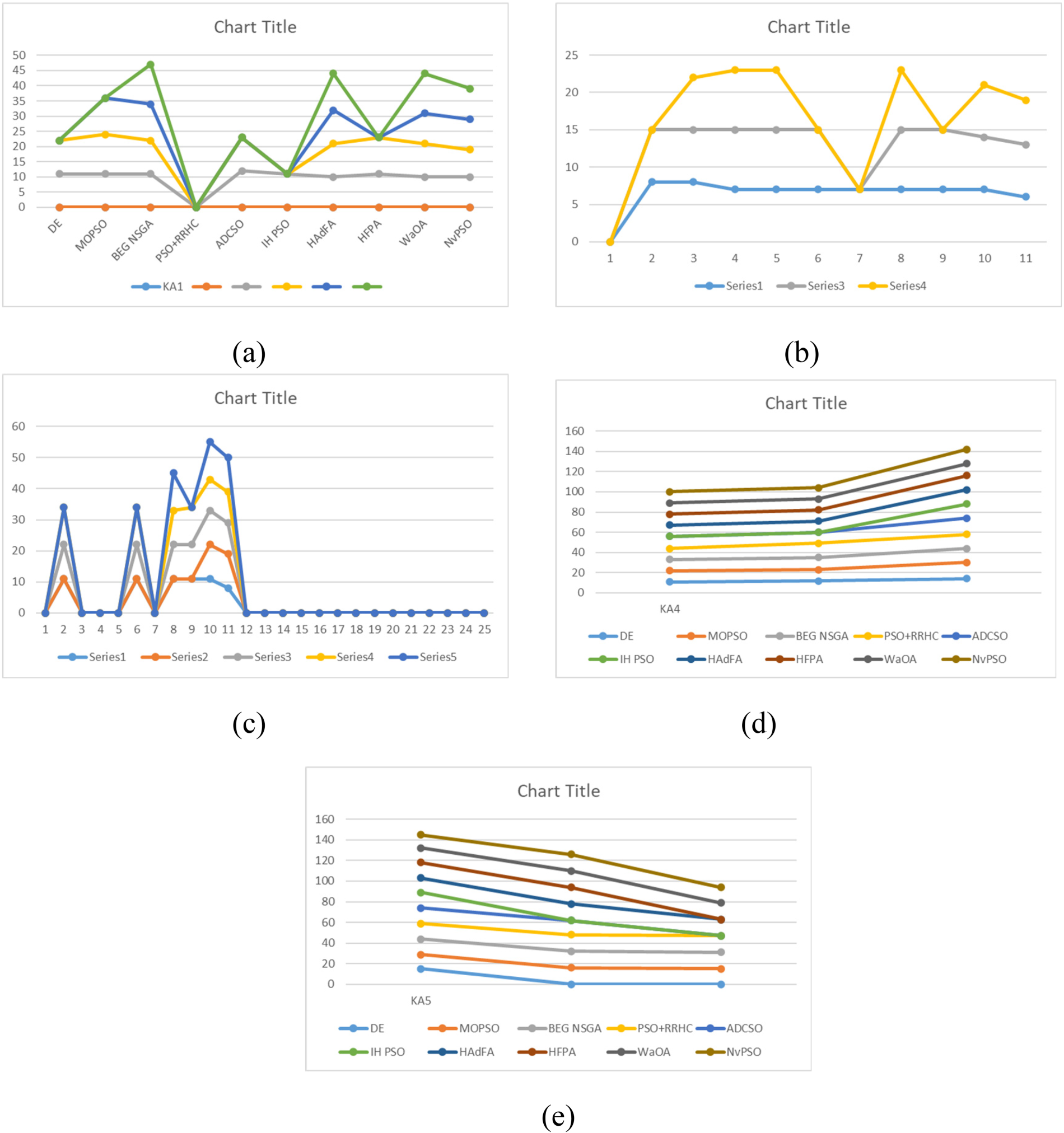
Graphical Analysis (a-e).
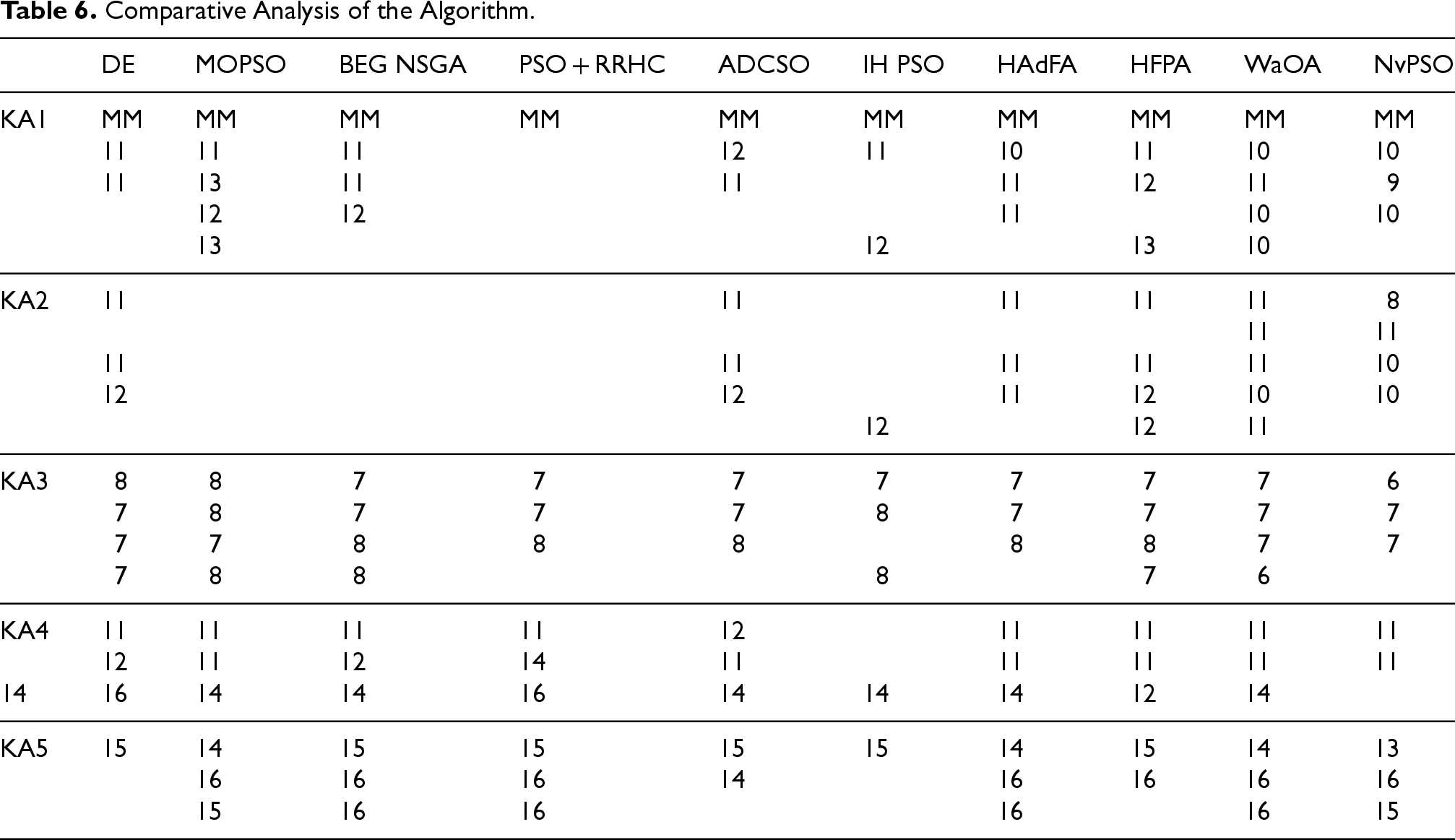
The NvPSO algorithm has demonstrated a clear edge over its competitors in terms of performance, as evidenced by its superior results across multiple instancesin Table 6. Specifically, NvPSO consistently achieves the lowest Makespan in four out of five tested scenarios—KA1, KA2, KA3, and KA5. The standout performance is particularly noTable in instance KA3, where NvPSO attains an exceptionally low Makespan of 6, the lowest observed among all the algorithms across any of the instances.In contrast, while many of the other algorithms show a similar range of Makespan values, typically between 10 and 16, there are distinct differences in their performance. Most algorithms display a reasonable level of consistency, but certain ones—such as Differential Evolution (DE), Basic Evolutionary Genetics (BEG), and variations of Particle Swarm Optimization (PSO + R) and Randomized Hill Climbing (RHC)—occasionally produce higher Makespans, especially in instances KA4 and KA5. These discrepancies are particularly pronounced in KA4 and KA5, where the Makespan values vary widely. Some algorithms in these instances yield Makespans as high as 16, while others manage to achieve more favorable outcomes in the range of 11 to 13.The broader variation in performance across instances KA4 and KA5 highlights their increased difficulty compared to other instances. The substantial range in Makespan values indicates that these scenarios present a greater challenge to most algorithms, with performance being less consistent and more variable.In summary, NvPSO is distinguished as the best-performing algorithm overall due to its ability to achieve the lowest Makespan in multiple instances. Although other algorithms generally show reasonable consistency, their performance is less reliable, especially in more challenging instances like KA4 and KA5, where they exhibit greater variability in Makespan results.
Comparative Analysis of the Algorithm.
12 Conclusion
This research provides a comprehensive evaluation of Particle Swarm Optimization (PSO) models, specifically focusing on the novel variant NvPSO, in addressing complex scheduling and energy minimization problems. By utilizing a set of 13 diverse jobsets, we tested the efficacy of NvPSO against traditional search algorithms, including Artificial Immune System (AIS) and Modified Genetic Tabu Algorithm (MGTA), as well as the Walrus Optimization Algorithm (WaOA). The goal was towardperformance of these algorithms in minimizing Makespan and energy consumption while providing a robust statistical analysis of their effectiveness.
Footnotes
Acknowledgements
The authors would like to thank all individuals and institutions who contributed to this research.
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.
Declaration of Conflicting Interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.