
Abstract
To avoid the waste of resources and improve the stability of generating power of early wind turbines. Aiming at the immature technical level of early wind turbine generators(WTGs), this paper proposes an adaptive PI control strategy for WTGs with variable pitch considering tower load shedding. First, to improve the adaptability of the pitch PI controller to different capacity units, the rotational inertia deviation normalization is used to realize the rotational inertia deviation auto-tuning. Second, to enhance the nonlinear compensation of wind turbine blades, the pitch gain scheduling module is designed. Then, two feedback links, anti-windup and tracking mode, are added on the basis of PI controller to avoid the problems of integral saturation and speed control failure of PI controller. In addition, to reduce the impact of wind load on the tower of the wind turbine, active damping control is added before and after the tower to suppress the vibration before and after the tower.
Introduction
Due to the limitations of technical level during the early construction period of the wind farm, there is a large safety margin in the design of wind turbines put into operation in the early stages. At the same time, the wind resources of wind turbines put into operation in the early stages are relatively good, and there is still some time before the wind turbines are retired. However, as the size of the WTG increases, the structural load of the unit increases, which had seriously threatened the safe and stable operation of the WTG (Rahman et al., 2019; Wang et al., 2024). Therefore, to avoid resource waste and reduce tower loads, adaptive optimal control methods considering tower loads need to be investigated to improve the load suppression capability while stabilizing the power output.
At present, the actual wind turbine control had been still mainly used in fixed-parameter PI control (Mostafa & Alireza, 2016), whose control parameters were usually determined based on theoretical design parameters and engineering experience, and can maintain a better control performance in the case of small changes in system parameters. However, in the actual operation of the wind turbine, with the changes in the external climate environment and the characteristics of the turbine itself, it will be difficult to ensure the smooth output of the turbine power under various disturbances. However, for the wind power generation system with strong nonlinearity and time-varying parameters (Akbarimajd et al., 2019; Luo et al., 2021; Ren et al., 2016), the nonlinearized constant model of the turbine had not been easy to establish. The wide range of random changes in wind speed also makes the control parameters less adaptable to the operating conditions, due to changes in external conditions or the action of the wind turbine itself, will make the wind turbine control process change (Guo et al., 2023; Liu et al., 2024). So that the PI control parameters are no longer applicable to the current controlled object, the control effect becomes worse, the need for PI control parameters with the wind speed and operating conditions change in real time. Therefore, this paper investigates the adaptive PI optimization control strategy for wind turbine with variable pitch considering tower load. When the dynamic characteristics of the wind turbine change, the PI parameters can be automatically adjusted online to adapt to different turbulent winds and different operating conditions based on considering the tower load.
To satisfy the dynamic characteristics of the real-time transformation of wind turbine controller parameters, Lee et al. (2014) had used time-delay estimation and nonlinear damping backpropagation to design a variable-gain PID controller, which had shown good control effect in solving the problem of unknown disturbances in the system. Sun et al. (2019) had designed a new adaptive PID controller using the A3C algorithm of deep reinforcement learning, which had approximated the value function using multi-layer neural networks to find the optimal control parameters and had solved the problems of slow convergence and low efficiency. Lin et al. (2013) based on multi-objective optimization technology and multi-attribute decision making technology, had put forward a PID parameter tuning method considering the balance of setting tracking, disturbance attenuation and robustness, and had applied it to the design of PID controller for wind turbine. Garmat et al. (2021) developed a multi-model predictive controller for variable-speed pitch-regulated wind turbines with enhanced PID-based parameter adaptation. However, the improved PID multi-model control validated in the literature only in 2MW units has limitations in scale applicability, and it is difficult to solve the risk of control instability brought by the complex nonlinear dynamics and extreme working conditions of large wind turbines. The above article uses a combination of reinforcement learning and PID controllers to regulate the controller parameters of wind turbines, but the time required to compute the controller parameters is long, making it difficult to apply to wind turbine pitch control.
Bekakra and Attous (2014) had used the Gray Wolf Optimization (GWO) algorithm to optimize the PI controller parameters of WTGs, but the GWO algorithm had relied heavily on the selection of the initial values, which had resulted in the algorithm failing to converge and affecting the control actions of WTGs. Xu et al. (2020) had proposed a method combining digital simulation and particle swarm algorithm for determining the optimal PI controller parameters for indirectly controlling the active and reactive power of doubly-fed wind turbines (DFIG). But only had considered solving the PI control parameters for a single operating condition and had not validated whether the method meets the operating conditions of WTGs, such as starting or stopping. Hasanien and Muyeen (2015) had combined the fuzzy control and PI control algorithm, had divided the fuzzy rules into four aspects, and had distinguished them according to the size of the error value between the generator's measured rotational speed and the rated rotational speed. Although it had improved the control accuracy, the standard of fuzzy division of the interval is not clear, and it had been difficult to cope with the sudden movements of the wind turbine for control. Gao and Wang (2016) had studied the adaptive genetic algorithm (AGA) used to optimize the PI control parameters of wind turbines; Echavarri et al. (2012) had applied the particle swarm algorithm in the PI control of wind turbine pitch, the above research mainly focused on the optimization of the initial value of the PI parameters, which resulted in the improvement of the system's control accuracy. But had not considered the real-time change of the PI parameters with the wind speed and operating conditions. Tian et al. (2012) had used small-signal analysis method in the DFIG to determine the operating point for linearization, based on which the controller was designed through the zero-pole configuration. But when the operating point of the system had been changed, the parameter-optimized controller control effect may deteriorate, and it was necessary to re-optimize the control parameters, and there was no discussion of the parameter optimization method of adaptive PI control that had been practically applied in the unit. The adjustment and optimization calculation of the controller parameters often take a lot of time, and it is difficult to ensure the real-time performance in practical application. The above method is mainly a combination of traditional PI controller parameter control and optimization methods, and its optimization effect depends on the number of iterations of particle swarm and the optimization results, and the model simulation environment is single, which is difficult to be applied to different types of wind turbines.
To address the issue of outdated control strategies in aging wind turbines, this paper proposes an adaptive PI pitch control strategy incorporating tower damping reduction. The main innovations of this study are as follows: 1) A rotational inertia deviation normalization method is developed to enable automatic adjustment of inertia deviations, significantly enhancing the pitch PI controller's adaptability to turbines with varying capacities. 2) A pitch gain scheduling module is designed to strengthen nonlinear compensation for turbine blades. Two supplementary feedback mechanisms (wind resistance and tracking modes) are integrated with the conventional PI controller, effectively resolving integral saturation issues, and preventing speed control failures. 3) An active damping control mechanism is implemented at both fore and aft tower positions, achieving vibration suppression in tower fore-aft directions to mitigate wind load impacts on turbine structures.
The rest of the paper is organized as follows. Section 2 describes the mathematical and dynamic models of wind turbines. The wind turbine adaptive PI pitch controller is designed in Section 3. Then, simulation results are given in Section 4 for different unit capacities and in different scenarios. Section 5 is the conclusion part of this paper.
Mathematical and Dynamic Models
Pitch Controller Model
Assuming that the drive shaft was a rigid shaft, the dynamic equations of the wind turbine and drive shaft were (Yesudhas et al., 2022):

Where, Tr represent pneumatic torque; Ng represent gearbox ratio; Tg represent generator torque; Jr represent rotational inertia of the wind turbine; Jg represent generator rotational inertia; wr0 represent wind turbine rated rotational speed; Δwr represent disturbance of wind turbine rotational speed with respect to the rated rotational speed; and Δ
A first-order Taylor expansion is performed for generator torque and pneumatic torque:


Where, P0 represent rated output power; P(β) represent mechanical power, where β is the pitch angle; wg0 represent generator rated rotational speed; Δβ represent pitch angle perturbation about the operating point.
From this, the control relationship between the pitch angle perturbation and the wind turbine speed perturbation can be established and PI control can be applied:

Setting
Where, ∂P/∂β represent pitch angle sensitivity; IDrive represent moment of inertia of the drive system; φ represent equivalent parameter.
The frequency ωφ and damping ratio ζφ of this 2nd order system can be derived from equation (6):

Where, Mφ, Kφ, Cφ represents equivalent mass, equivalent stiffness, equivalent damping.
For the pitch angle controller had designed, Feng et al. (2017) suggested that negative damping and differential gain should be ignored, and ωφ = 0.6 rad/s and ζφ = 0.6∼0.7 are usually chosen for the second-order system, so that the controller parameters are shown in equation (7):

Where, ωφ represent equivalent system fundamental frequency. The PI gain calculated by equation (7) is obtained at a pitch angle of 0°. The above KP and KI are used as the initial values of the WTG model inputs.
Due to the small damping before and after the first-order modes of the tower, before and after vibration is easy to occur under the influence of wind load. For this reason, the active damping control of the tower front and rear is added to increase the equivalent damping to suppress the tower front and rear vibration. Since it is difficult to measure the velocity
In real wind turbines, tower top acceleration is measured directly by a triaxial piezoelectric acceleration sensor (e.g., PCB Piezotronics Type 356A15), which is usually mounted where the tower top flange meets the nacelle floor. The sensor range covers ±5 g and the frequency response range are 0.5–3000 Hz, which meets the vibration monitoring needs of the tower's first-order modes (0.2–0.3 Hz). To suppress high-frequency noise, the sensor signal is processed by a 4th-order Butterworth low-pass filter (cutoff frequency 10 Hz), and phase delays caused by sensor mounting position offsets are eliminated by a dynamic compensation module (Stoevesandt et al., 2022).
The block diagram of the working principle of the active damping control system for a large wind turbine tower is shown in Figure 1. The first-order dynamic response of the tower before and after had been expressed as a second-order damped resonant motion (Cao, 2021; Ying et al., 2015).


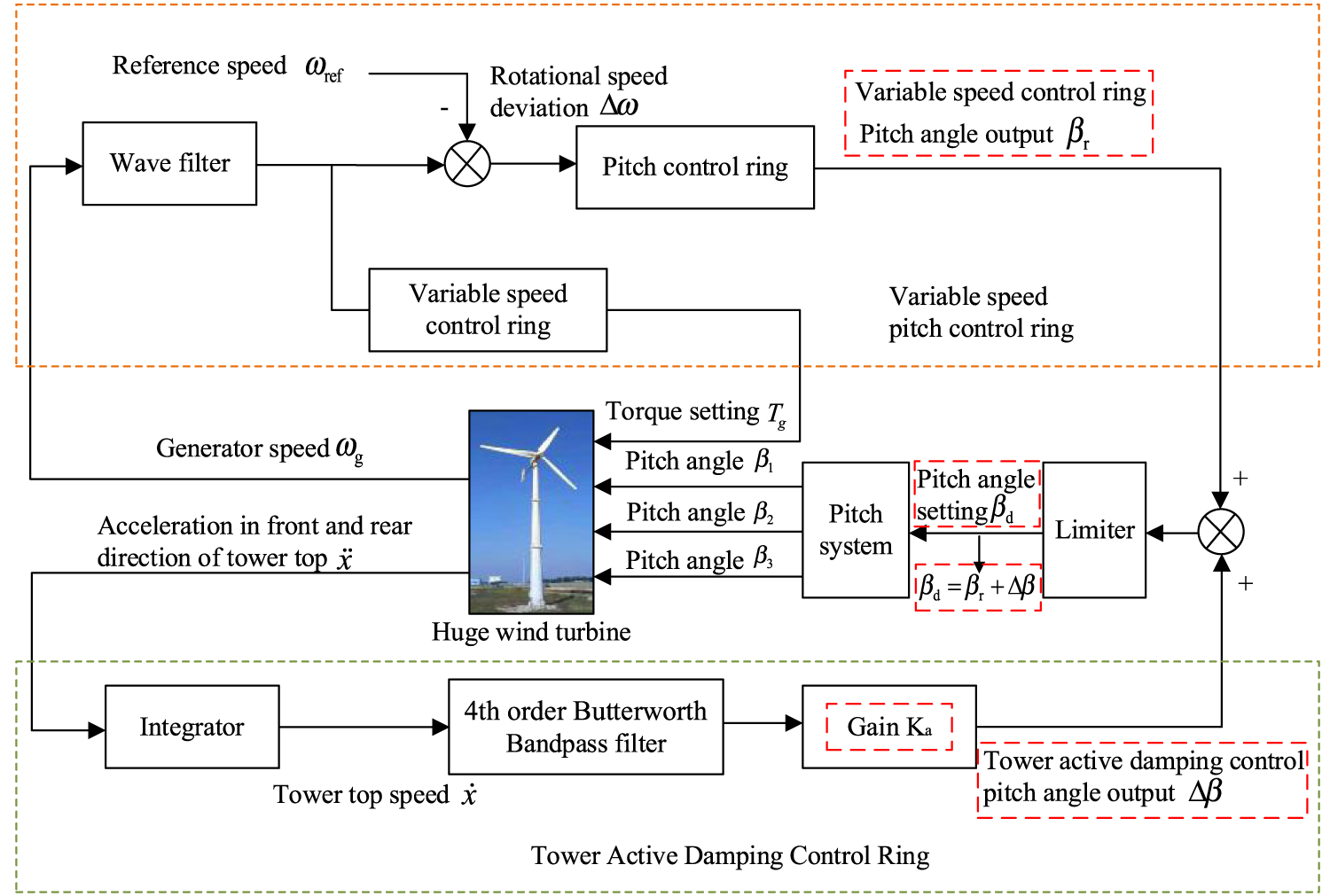
Block Diagram of Active Damping Control for Large Wind Turbine Tower.
From equations (8) and (9), it can be deduced:

Based on the derivation of the above equation, the equivalent damping of the tower is increased from Di to (Di + B). Subsequently, ΔFi can be further expressed as:

Based on equation (11), the relationship between the additional pitch angle and the velocity before and after the top of the tower can be derived as follows.

Where,
According to equation (12), aerodynamic damping B is needed to calculate the active damping gain. Therefore, the linear relationship between the load fluctuation q and wind speed fluctuation u acting on a blade of unit length can be expressed as:

Furthermore, the wind speed fluctuation u can be replaced by the blade fluctuation speed -

Subsequently, the aerodynamic damping B of the rotor can be expressed as:

In this paper, the sensor signal processing process is improved by introducing a dynamic compensation module (see the phase correction method in literature [Stoevesandt et al., 2022] for details). Specifically, after the tower top acceleration signal is low-pass filtered by 4th order Butterworth, the dynamic gain compensation coefficient Ka is used for adaptive adjustment of the parameters, in which Ka is computed by innovatively combining the turbine capacity parameters.
Based on the aerodynamic damping model (equation 15) from literature (Liu et al., 2022), this study innovatively introduces the capacity correction factor η to improve the active damping gain as:


Where, R is the impeller radius and D is the tower diameter.
Since it is difficult to adapt the same set of variable pitch PI controller to wind turbines with different power levels and blade sizes, to reduce the task of adjusting parameter for different units, the method of normalizing the rotational speed deviation and compensating the blade nonlinearity is proposed. Because of the large deviation of large wind turbine units, the corresponding value of the controller should be increased synchronously, and the rotational inertia normalization can solve the problem of inconsistent step size of direct rotational inertia deviation of different models. Normalization of rated speed ensures that the controller responds proportionally to the percentage of rated speed error, which is the relative quantity, rather than the absolute error quantity. It reduces the variability of different WTG controllers’ tuning parameters and has a strong and consistent performance for different WTG input models. Figure 2 illustrates the PI pitch controller parameter optimization process.
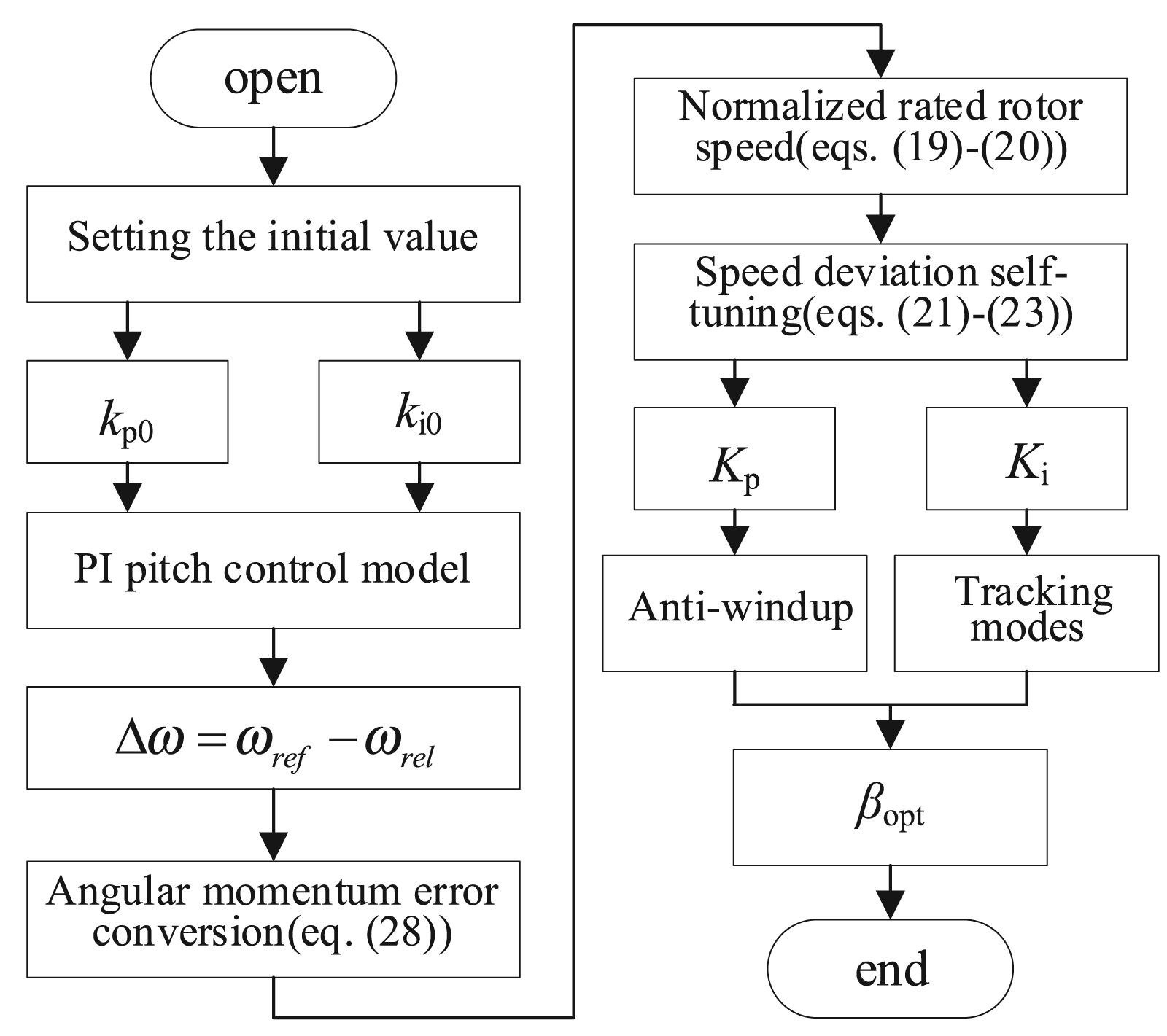
PI Pitch Controller Parameter Optimization Process.
In this section, a rotational inertia deviation normalization method is proposed to automatically adjust the inertia deviation, which significantly improves the adaptability of the pitch PI controller to wind turbines of different capacities.
To ensure a good tracking speed in the transition section, the controller introduces a nonlinear compensation for speed deviation. So that the controller will have a stronger responsiveness to speed deviation, and thus more effective control. The nonlinear characteristic of the speed deviation reduces the amount of instantaneous fluctuation changes in the speed and makes it follow the speed reference value ωref stably. Equations (18)-–(21) represent the process of normalization and nonlinearity of rotor speed deviation of wind turbine. Firstly, speed deviation self-tuning is based on the relationship between speed and moment of inertia. Firstly, the speed deviation is converted into moment of inertia, as shown in formula (19). Unlike traditional direct use of speed deviation, the proposed moment of inertia includes parameters such as speed deviation, air density, gearbox ratio, and optimal power coefficient, considering the impact of various factors on wind turbine control, it has better applicability for wind turbines of different capacities. Secondly, set nonlinear coefficients, as shown in formula (21), which can reduce the impact of linearization on wind turbine control. Then, the deviation of the moment of inertia was multiplied by the nonlinear coefficient to achieve normalization and nonlinearity of the speed deviation. Based on this, a pitch gain scheduling was designed to compensate for the nonlinearity of the blades, reducing the deviation of the corresponding relationship between the pitch angle and torque in the lookup table method. Finally, by combining the nonlinear speed deviation Lerr,norm with the nonlinear compensation coefficient, the speed deviation was automatically adjusted.



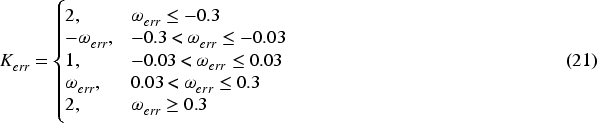
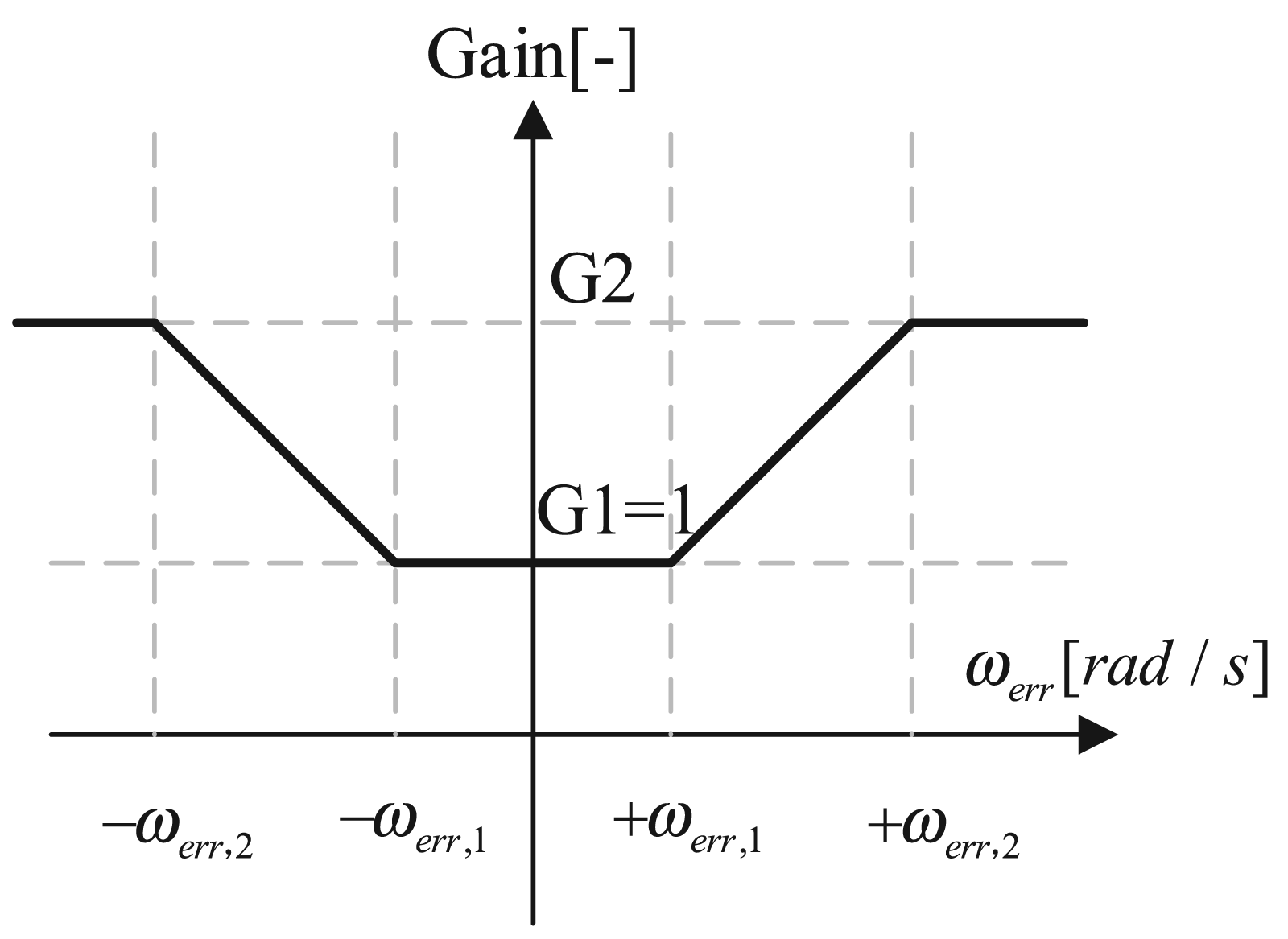
Segmental Function of the Nonlinear Compensation Coefficient K_err for Speed Deviation.
As can be seen in Figure 3, the gain of the speed deviation is taken as 1 when the speed deviation is between +/-ωerr,1. If the speed deviation is beyond the transition between +/-ωerr,1, the gain is higher than 1. This allows the controller to be more responsive to the speed deviation, resulting in a more effective control.
The rotational speed deviation self-tuning principle is shown in Figure 4, in which βopt, ωrotor,opt and Vwind,opt denote the optimal pitch angle, optimal rotational speed and wind speed. kp0 and ki0 are the initial values of PI control parameters, which are obtained according to the empirical method. The purpose of the pitch gain scheduling method is to provide nonlinear compensation for wind turbine blades. The variable pitch gain scheduling method constructed in this paper is based on the look-up table method with the addition of blade nonlinear compensation, which can reduce the deviation of the correspondence between the pitch angle and the torque in the look-up table method, and the calculation process of this method is shown in eqs. (22)-(24).

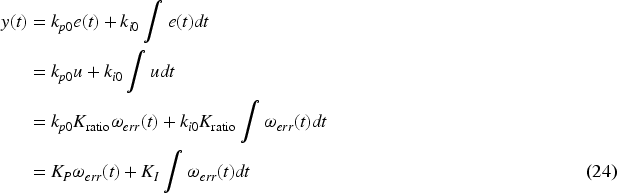
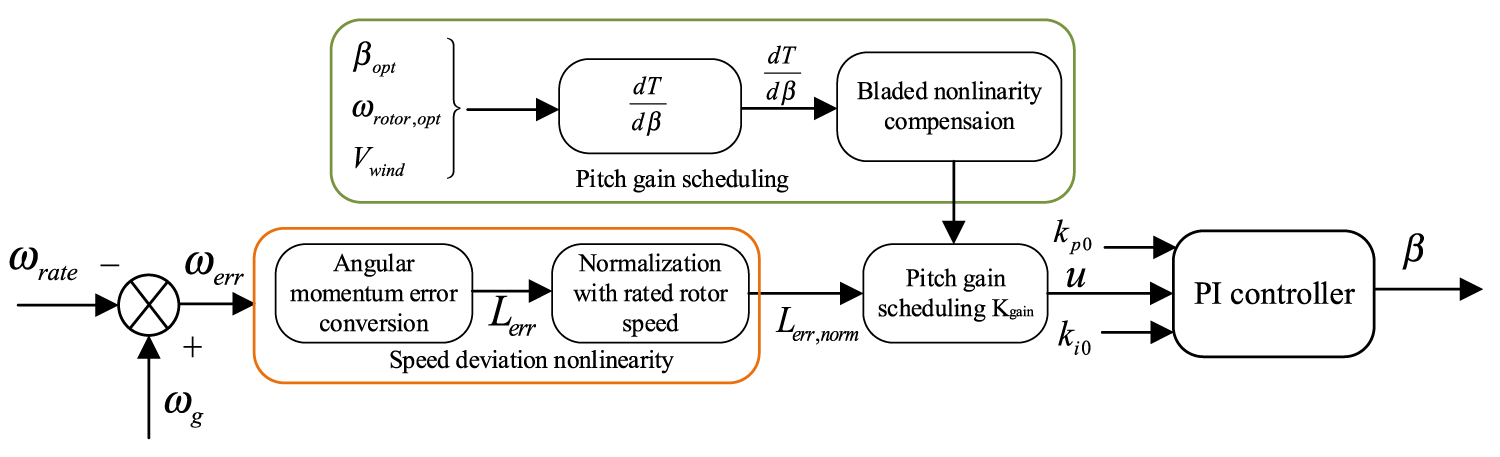
Self-tuning Principle for Speed Deviation.
In this section, A pitch gain scheduling module is designed to strengthen nonlinear compensation for turbine blades. Two supplementary feedback mechanisms (wind resistance and tracking modes) are integrated with the conventional PI controller, effectively resolving integral saturation issues, and preventing speed control failures.
The PI control system is unable to accurately control the wind turbine with serious nonlinearity due to its fixed control parameters. In response to this problem, many scholars have introduced the self-tuning control technology into the PI control and achieved good control results. Self-tuning control belongs to the category of variable gain control, which is mainly characterized by an online identification of the controlled object model, the purpose is to provide accurate real-time change information for determining the controller parameters, but it is still difficult to be realized in the core hardware of the wind power controller (programmable controller), and the calculation of many online tuning algorithms is large, which is difficult to ensure real-time performance in practical applications. Variable gain PI controller is utilized for variable gain control, and this algorithm is simple, fast and easy to implement.
In this paper, the pitch adaptive PI optimal control is used to dynamically adjust and optimize the PI parameters in order to find the optimal PI control parameters quickly and accurately. The pitch controller adds Anti-windup and tracking modes to the PI control. The ωref is calculated by the operating point set point module, and the output of the PI loop driven by the constant optimal tip speed ratio will be zero when the output of the integrator exceeds the boundary limit, and the Anti-windup can avoid the occurrence of integral saturation. Tracking mode enables the PI controller to track the pitch signal when it cannot control the speed, and is used to prevent smooth switching between torque and pitch controllers. u denotes the speed deviation trim value, which is used as an input to the pitch PI controller. Ts is set to 600 s, kb and kt denote the anti-windup signal gain value and the tracking signal gain value, respectively. The feedback signal can be adjusted quickly and effectively. The pitch PI controller schematic is shown in Figure 5.
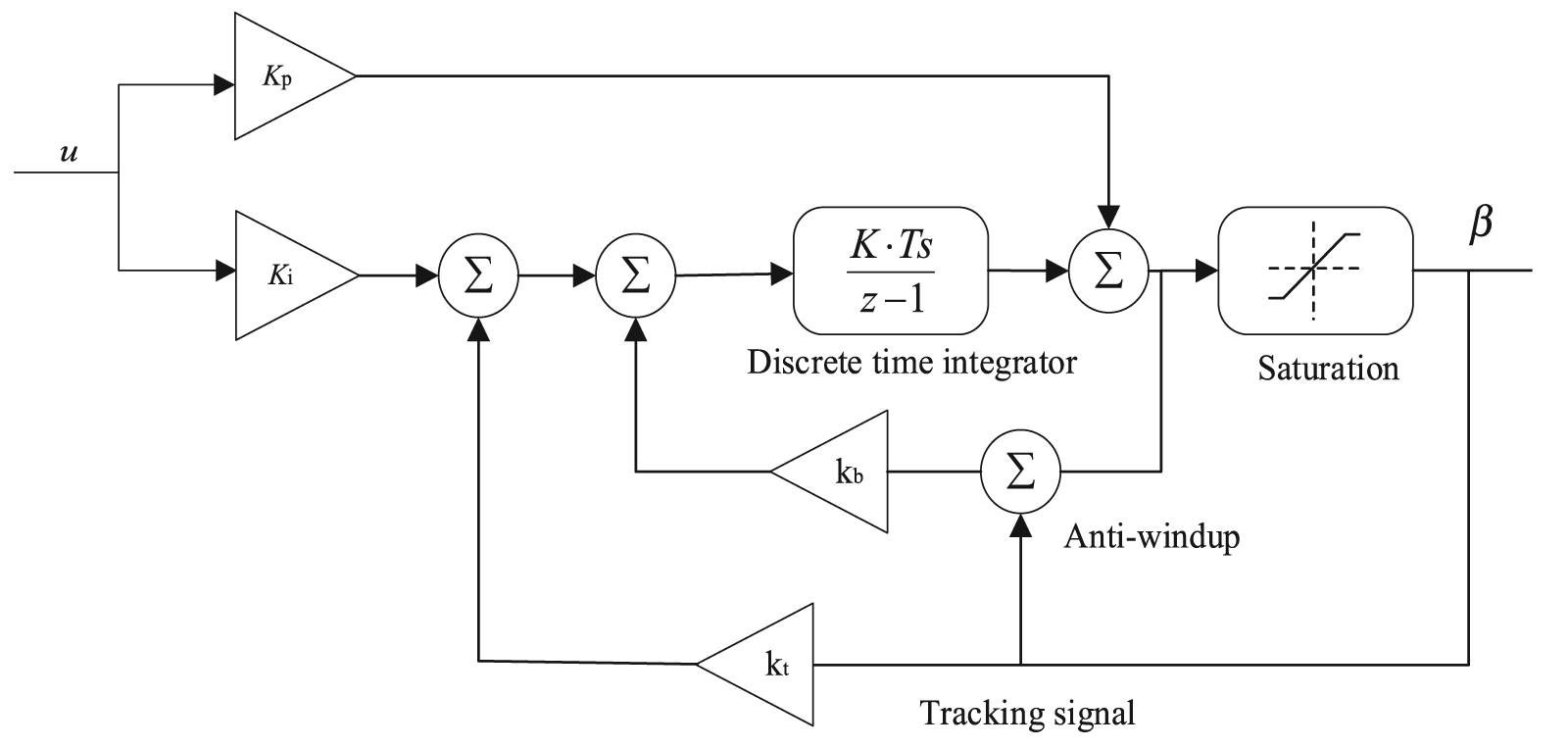
Optimized Design of Pitch PI Controller.
Calculation Conditions
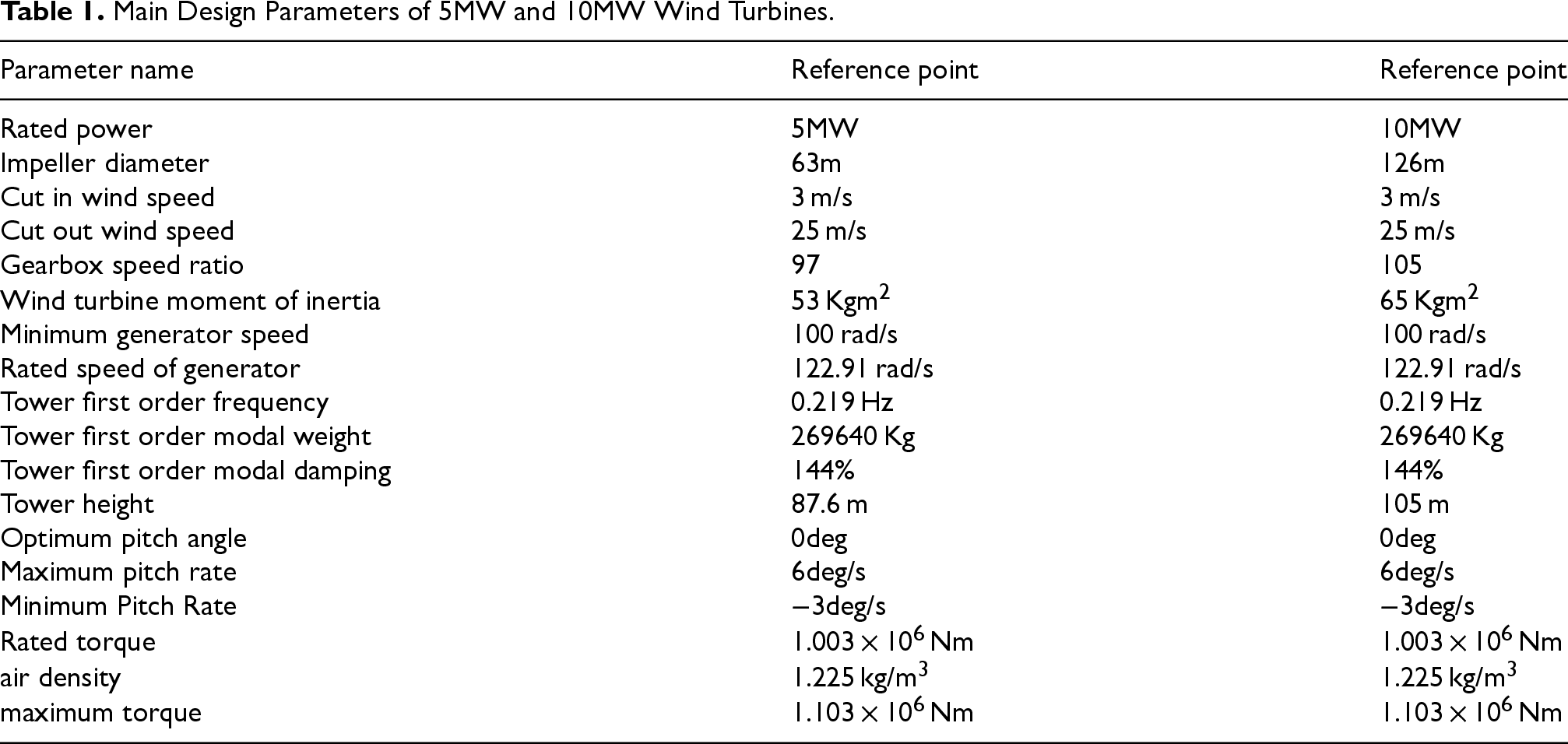
The Bladed software has been certified by Germanischer Lloyd (GL) and the International Electrotechnical Commission (IEC) and is widely recognized by researchers. Therefore, the physical models of 5MW and 10MW WTGs were established using Bladed software, and Table 1 demonstrates the design parameters of 5MW and 10MW WTGs. The simulation model established using Bladed consists of several main parts: blade, impeller, tower, nacelle, drive train, control system, pitch system, converter response, loss table and other related models. cp table and ct table are generated by bladed settings. The blade tip speed ratio is in the range of [0,20] with a step of 1. The pitch angle is in the range of [-5°,45°] with a step of 1°.
Main Design Parameters of 5MW and 10MW Wind Turbines.
Main Design Parameters of 5MW and 10MW Wind Turbines.
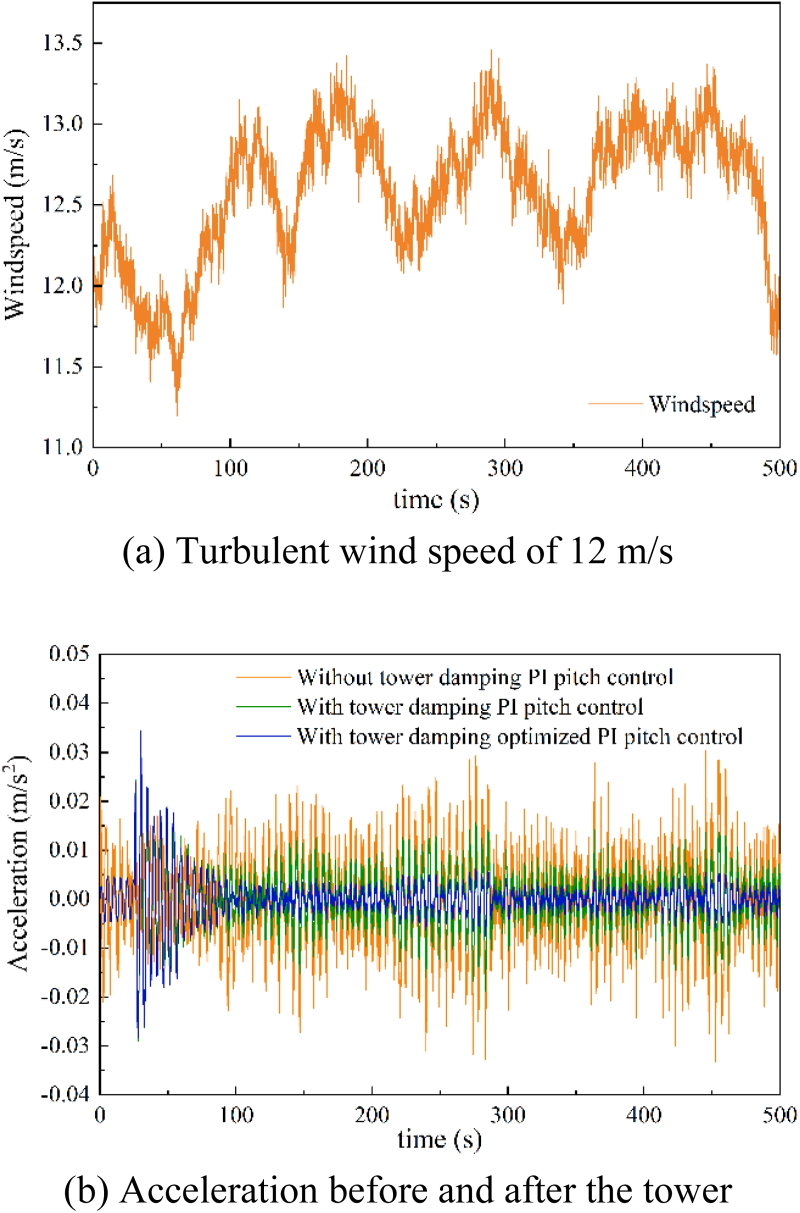
12 m/s Wind Speed and Acceleration Before and After the Wind Turbine Tower. (a) Turbulent Wind Speed of 12 m/s; (b) Acceleration Before and After the Tower.
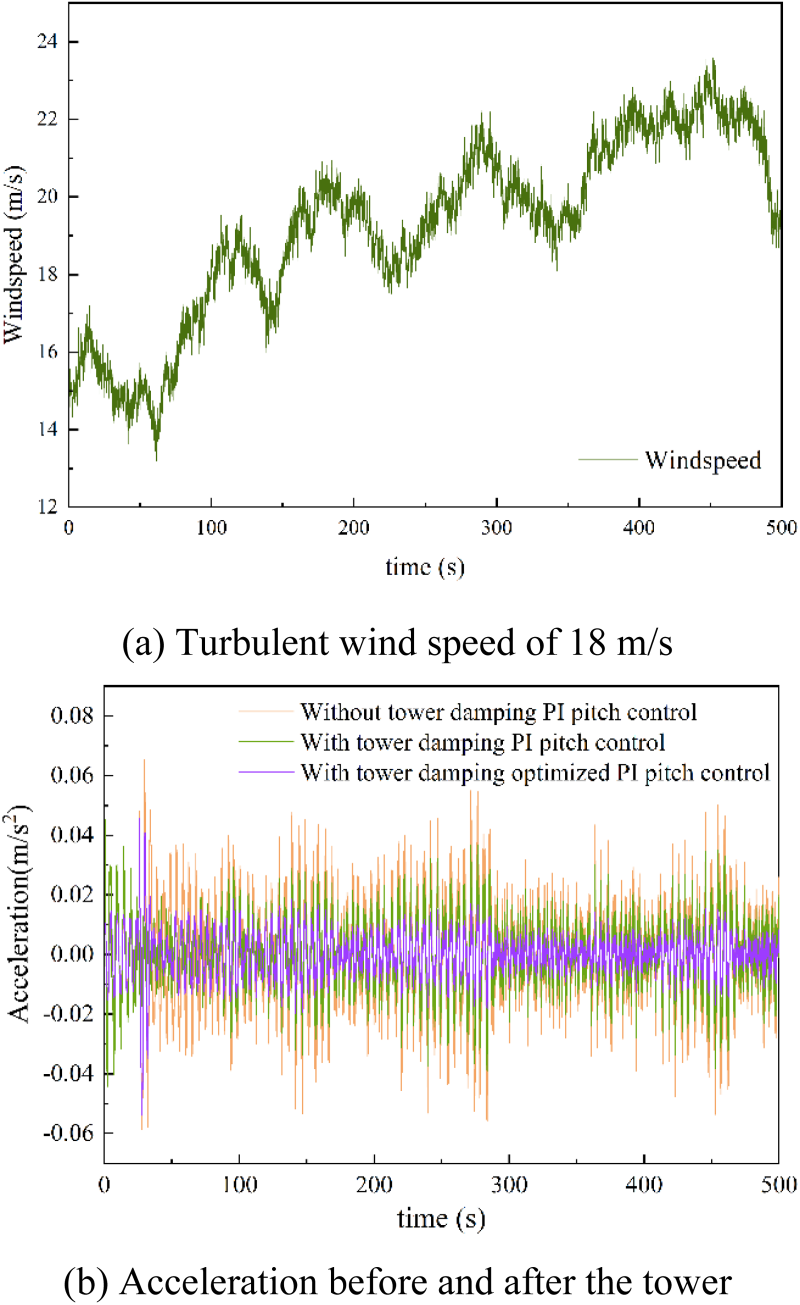
18 m/s Wind Speed and Acceleration Before and After the Wind Turbine Tower. (a) Turbulent Wind Speed of 18 m/s; (b) Acceleration Before and After the Tower.
Parameters are provided by the bladed software. Therefore, the initial value of the tower active damping gain Ka can be obtained by equation (16). To better demonstrate the effectiveness of the adaptive PI pitch control considering the tower active damping control, Figures 6 and 7 respectively show the wind speed profiles and the tower before and after acceleration curves at 12 m/s and 18 m/s. The superiority of the adaptive PI pitch control considering the tower active damping control is verified by comparing the tower front and rear accelerations under the PI pitch control without considering the tower active damping control, the PI pitch control considering the tower active damping control and the adaptive PI pitch control considering the tower active damping control. In Figure 5, the turbulent wind is set to 12 m/s and the turbulence degree is set to 0.5. In Figure 6, the turbulent wind is set to 18 m/s and the turbulence degree is set to 1.5.
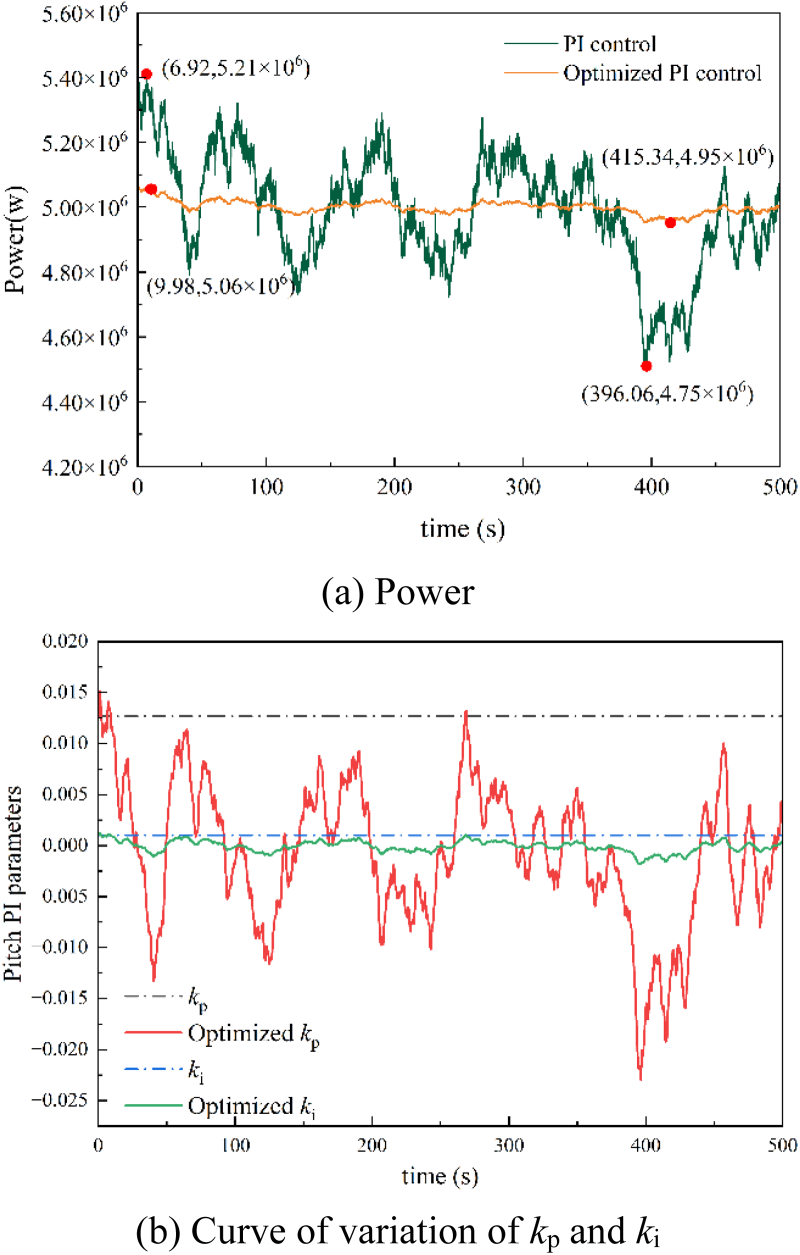
Normal State Output Response of 5MW Wind Turbine. (a) Power; (b) Curve of Variation of kp and ki.
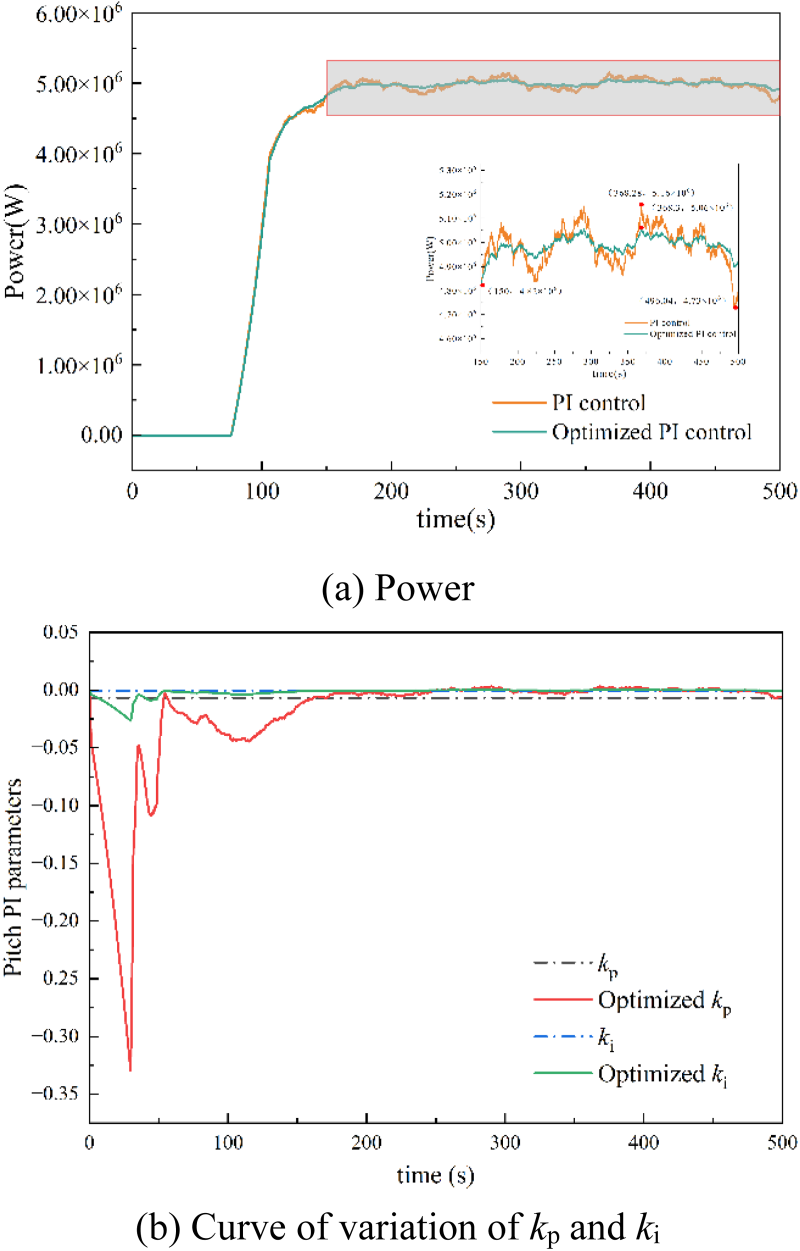
Output Response Under Startup Condition of 5MW Wind Turbine. (a) Power; (b) Curve of Variation of kp and ki.
From Figure 6(b) and Figure 7(b), the range of acceleration fluctuation between the front and rear of the tower is significantly reduced after increasing the damping control, which verifies that increasing the equivalent damping can reduce the effect of wind load on the tower vibration.
5MW Wind Turbine Power Operation.

Performance Test of 5MW Wind Turbine Under Different Working Conditions
In order to verify the effectiveness and accuracy of the adaptive PI optimization control for wind turbine pitch control, a wind turbine and controller model were constructed. Simulate and verify the adaptive PI optimization controller for variable pitch using NREL 5MW wind turbine. The power curves and PI parameter curves of the 5MW WTG under normal and startup conditions are shown in Figure 8 and Figure 9. In this paper, the relative standard deviation (RSD) is used as a criterion for judging the power fluctuation and torque fluctuation of the WTG, and the RSD is calculated as follows:

Where, Yreal represent actual value, Ynorm represent,
Figure 8 and Figure 9 represent the corresponding outputs of the 5MW WTG under normal operating conditions and startup conditions for PI control and pitch adaptive PI optimization control, respectively. Figure 8(b) and Figure 9(b) show the kp and ki values of the different controllers for the wind turbine under normal operating conditions and startup conditions, respectively. In summary, the optimized PI control yields a smaller range of output power fluctuations and a more stable output for the wind turbine. Table 2 demonstrates the power deviation of the 5MW wind turbine under PI control and adaptive PI control.
From Table 2, the operating power deviation of the 5MW wind turbine based on adaptive PI control under normal and startup conditions is lower than that under PI control, which verifies the stability of adaptive PI control.
In order to verify that the pitch-adaptive PI optimization controller is suitable for different capacities of WTGs, this paper selects a 10MW WTG for simulation verification. The power curves and PI parameter curves of the 10MW WTG under normal and startup conditions are shown in Figure 10 and Figure 11. Table 3 demonstrates the power deviation of the 10MW wind turbine under PI control and adaptive PI control.
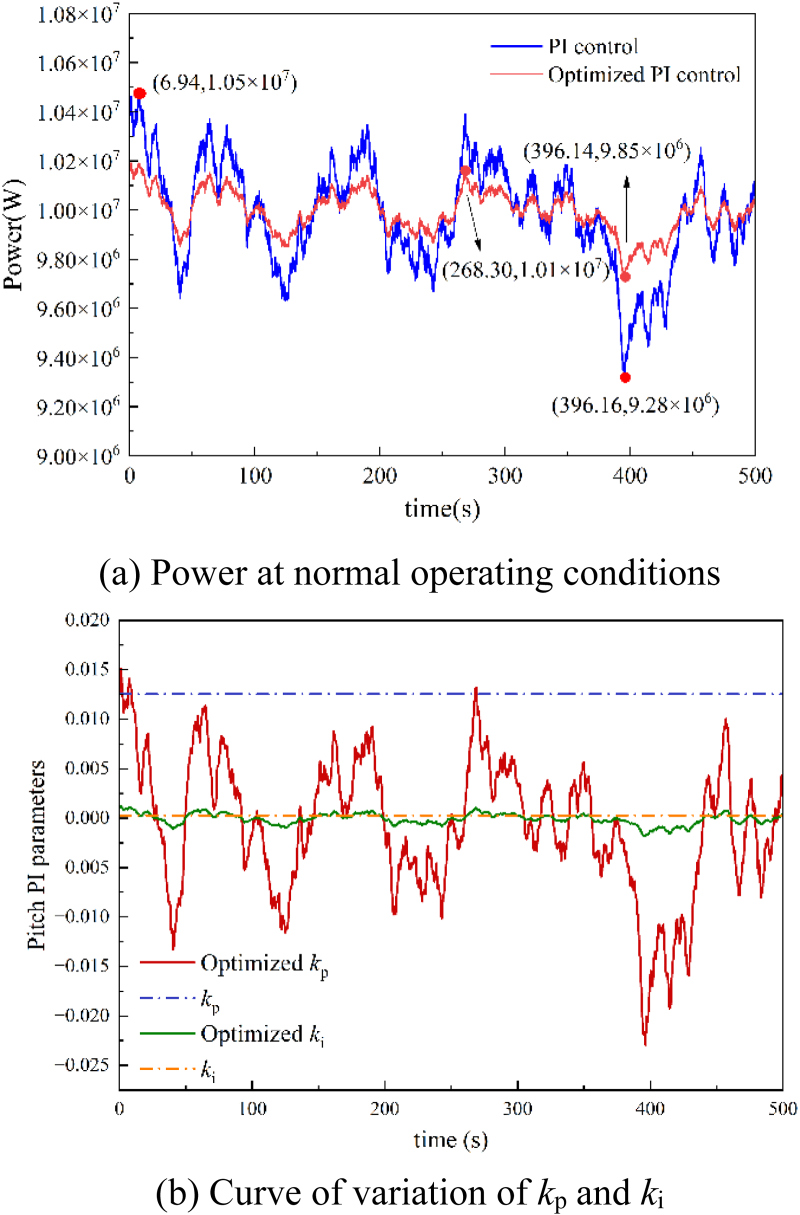
Normal State Output Response of 5MW Wind Turbine. (a) Power at Normal Operating Conditions; (b) Curve of Variation of kp and ki.
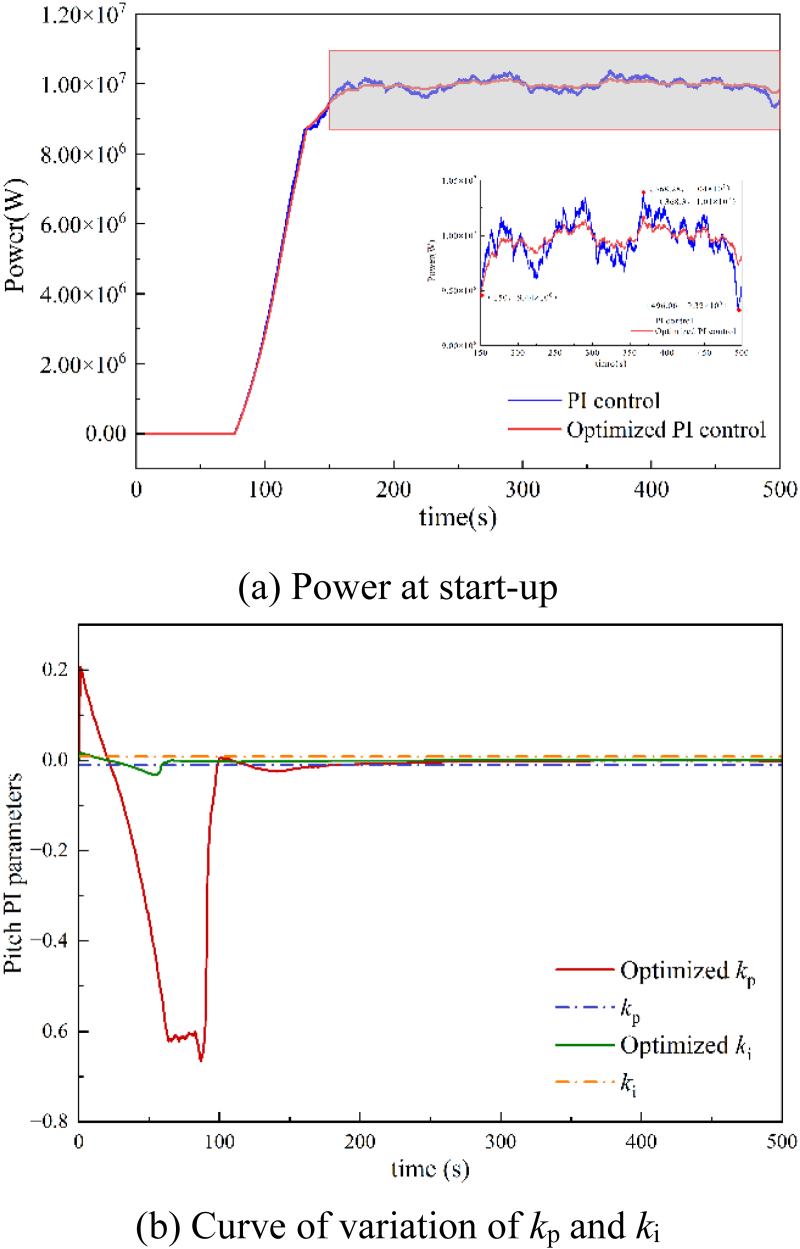
Output Response Under Startup Condition of 10MW Wind Turbine. (a) Power at Start-up; (b) Curve of Variation of kp and ki.
10MW Wind Turbine Power Operation.

From Figure 10 and Figure 11, it can be seen that the power fluctuation of the turbine with adaptive pitch-variable PI optimization control is smaller and the output power is more stable, which can be well stabilized near the rated value under normal turbulent wind and startup conditions.
From Table 3, the operating power deviation of the 10MW wind turbine based on adaptive PI control under normal and startup conditions is lower than the operating power deviation under PI control. The simulation verification of 5MW and 10MW WTGs shows that the adaptive PI optimization control method proposed in this paper effectively reduces the power fluctuation and increases the stability of WTGs under different operating conditions.
In this paper, an adaptive PI optimized controller is used, whose parameters change dynamically with the system conditions (e.g., wind speed and rotor inertia), so the traditional frequency domain Bode analysis cannot be directly applied. To assess the closed-loop stability of the system under adaptive control, a frozen-time linearization method is adopted (Chen et al., 2011; Wang et al., 2013).
A 5 MW wind turbine is selected for simulation verification at a wind speed of 12 m/s. The adaptive PI parameter optimization method proposed in this paper is compared with the conventional PI parameter method at 12 m/s corresponding to the fixed values of kp and ki parameters. Their Bode and pole plots are given in Figure 12.
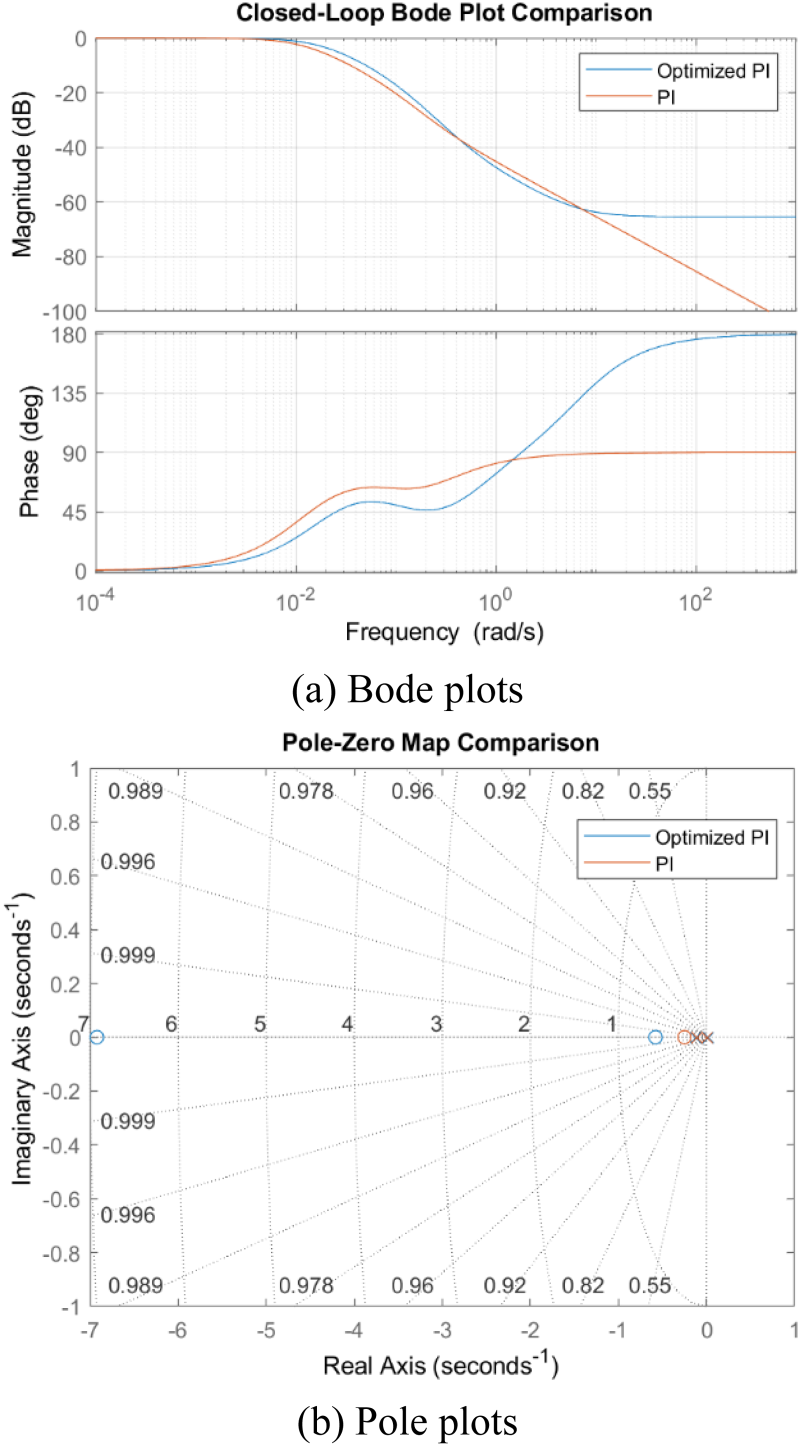
Bode Plots and Pole Plots. (a) Bode Plots; (b) Pole Plots.
As can be seen in Figure 12, the phase margin is improved to 45° (30° for ordinary PI), and the gain decay slope at the cutoff frequency of 0.6 rad/s is accelerated to −40 dB/dec, which effectively eliminates the 2 dB resonance peak of the ordinary PI in the low-frequency band (10−2 rad/s) and suppresses the risk of tower vibration. The pole distribution shows that the optimized pole damping ratio is improved by 35% (0.51→0.69), the real part is left shifted to −0.92 s−1 (−0.55 s−1 for ordinary PI), and the dynamic convergence speed is accelerated by 41%, which meets the stringent stability requirements of wind turbines for fast pitch change and turbulence disturbance resistance.
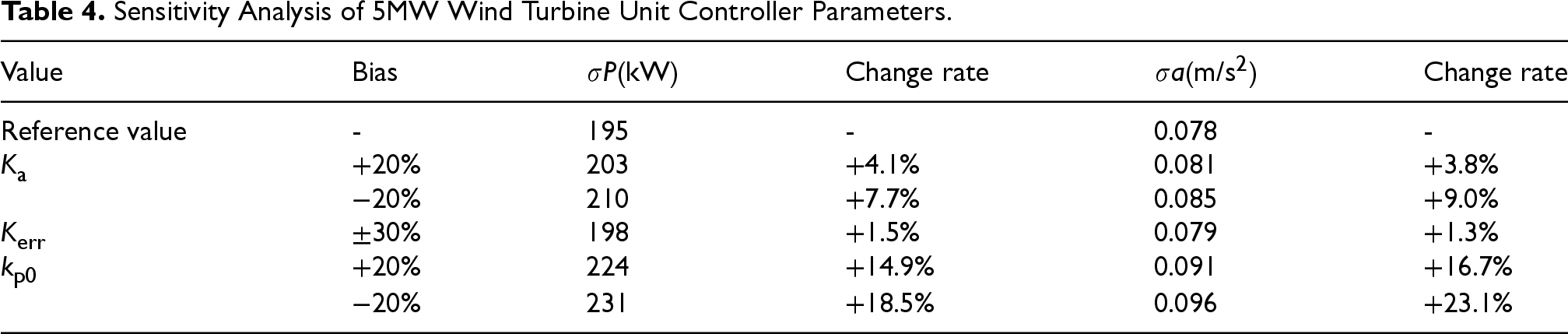
To verify the robustness of the proposed adaptive PI control strategy, the key parameters of the controller are analyzed with ±20% perturbation in this section. The tower active damping gain Ka, the speed normalization factor Kerr, and the PI initial gain kp0 are selected for sensitivity analysis to test the effects of parameter deviations on the standard deviation of the power (σP) and the tower top acceleration (σa) of the 5MW wind turbine. The simulation condition is 18 m/s turbulent wind (IEC Class B) and the results are shown in Table 4.
Sensitivity Analysis of 5MW Wind Turbine Unit Controller Parameters.
Sensitivity Analysis of 5MW Wind Turbine Unit Controller Parameters.
It is clear from the analysis in the table:
The low sensitivity of the active damping gain Ka, with a power fluctuation increase of <8% for ±20% perturbation, verifies the robustness of the aerodynamic damping model of equation (16). The segmental threshold adjustment of the rotational speed nonlinearity compensation coefficient Kerr has a weak impact on the system (<2%), thanks to the design of the moment of inertia normalization in Section 3.1. The sensitivity of the initial PI parameter kp0 is high, but it is corrected in real time during actual operation by the gain scheduling module in Figure 4, and the field data show that the adaptive mechanism can make the dynamic adjustment range of kp up to ±35%, which effectively compensates the initial parameter deviation.
In this paper, an adaptive PI optimization control method for pitch control of wind turbines considering tower load is proposed for the technical transformation of old wind turbines. The method solves the control parameter problem in pitch control, and at the same time considers the influence of tower load on pitch control. The conclusions drawn in this paper are as follows:
increasing the tower active damping controller, the tower front and rear acceleration and thus the tower displacement are reduced, and the tower load is reduced. Through the simulation verification of 5MW and 10MW wind turbines under normal turbulent wind conditions and startup wind conditions. The results show that the power deviation of the 5MW wind turbine decreased by 88.95% under normal operation conditions, 52.34% under startup conditions. The 10MW wind turbine decreased by 59.86% under normal operation conditions, and 44.51% under startup conditions. The effectiveness of the proposed method is verified. The adaptive PI optimization control method proposed in this paper can achieve stable power output with small power deviation and is not limited by the capacity of the turbine, operating conditions and wind speed.
This paper proposes a control strategy improvement method for old wind turbines, compared with the latest intelligent control methods, although there is a theoretical performance gap, but more practical and economic advantages, for the stock of units to provide a higher feasibility of the solution.
Footnotes
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Science and Technology Project of SGCC, (grant number 4000-202355454A-3-2-ZN).
Declaration of Conflicting Interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.