
Abstract
Anthropomorphism has traditionally been viewed as a means to compensate for a lack of social connection; therefore, social deficits are considered to facilitate anthropomorphism. In this research, we adopted an alternative growth-oriented perspective of anthropomorphism. We posited that anthropomorphism operates as a means to explore the social world, and thus hypothesized that social connectedness promotes robot anthropomorphism. To test this hypothesis, we conducted three studies (total N = 599) examining the effect of social connectedness on robot anthropomorphism. We found that social connectedness increased robot anthropomorphism. Importantly, genuine interest in social interactions with robots accounted for this effect. In addition, anthropomorphism elicited by social connectedness predicted more favorable attitudes toward robots. These findings enrich the current understanding of anthropomorphism and have practical implications.
Keywords
Anthropomorphism refers to attributing uniquely human characteristics, such as the mental capacity to think and feel, to non-human entities (Epley et al., 2007). As human–robot interaction is ubiquitous, robot anthropomorphism has become increasingly common in people’s everyday lives (Merrill et al., 2022). For example, people often view robot companions as caring. Robot anthropomorphism is closely related to prosocial behavior toward and ethical considerations for robots (Nielsen et al., 2022). Therefore, the question of why people anthropomorphize robots is generally of great interest to researchers involved in psychology, robotics, behavioral ethics, and policymaking. Anthropomorphism has traditionally been perceived to increase the similarity between humans and non-human agents, thereby providing the potential for social connection (Waytz et al., 2010) and counteracting a sense of social disconnectedness (e.g., loneliness and social exclusion; Mourey et al., 2017). According to this perspective, social disconnectedness promotes anthropomorphism (Caruana et al., 2021; Epley et al., 2008a, 2008b; Shin & Kim, 2020).
However, how might social connectedness (i.e., a sense of acceptance and connection with others) influence anthropomorphism? It makes intuitive sense that people who feel socially connected with others would be less likely to anthropomorphize non-human agents because those people no longer need to make social connection (Bartz et al., 2016; Waytz & Epley, 2012). However, this notion has been challenged by empirical and theoretical evidence. Previous research has shown that social connectedness leads to more humanness attribution to others (Zhang et al., 2015). Furthermore, compared with socially excluded participants, those who were socially accepted reported an equal or a greater tendency to anthropomorphize non-human agents (Kwok et al., 2018; Ruijten et al., 2014). Dispositional traits closely related to belongingness and enthusiasm about new experiences, such as extroversion (Swickert et al., 2002), have been found to positively predict general tendencies toward anthropomorphism (Kaplan et al., 2019). Overall, anthropomorphism may not necessarily be driven by a sense of social deficits, but by one’s genuine interest in exploring the social world. Thus, the present research aimed to propose a growth orientation of anthropomorphism by examining the effect of social connectedness on robot anthropomorphism.
Social Connectedness and Anthropomorphism
Anthropomorphism—particularly attributing the capability to think and feel to non-human agents—is a method through which people can connect with the agents (Waytz et al., 2010). People maintain connections with others for two main reasons (Lavigne et al., 2011): to compensate for loneliness (deficit-reduction orientation) and achieve personal and interpersonal development (growth orientation). Accordingly, we assumed that anthropomorphism acts in two ways. First, a deficit-reduction orientation suggests that anthropomorphism serves to compensate for loneliness and social exclusion, allowing lonely or socially excluded people to fill a social void by anthropomorphizing non-human agents (Brown et al., 2016; Mourey et al., 2017). Second, a growth orientation suggests that anthropomorphism promotes psychological growth, which is the potential to embrace new experiences and seek optimal challenges (Sedikides & Wildschut, 2020). From a growth-oriented perspective, anthropomorphizing non-human agents is a way to explore one’s social world or broaden social networks (Dang & Liu, 2023). Most importantly, as a growth orientation leads people to interact with others in a non-defensive manner (Lavigne et al., 2011), a growth orientation of anthropomorphism reflects people’s tendency to anthropomorphize a non-human agent out of a genuine interest to establish social connection with that agent. Although several studies provide evidence supporting the deficit-reduction orientation by examining the effect of social disconnectedness on anthropomorphism (Caruana et al., 2021; Epley et al., 2008a, 2008b; Shin & Kim, 2020), growth-oriented anthropomorphism has not yet been fully explored.
To fill this knowledge gap, we introduced and tested a model, indicating that social connectedness promotes robot anthropomorphism via increased genuine interest in social interactions with robots. Social connectedness refers to the sense of closeness with one’s social environment (Lee et al., 2001). Contrary to social disconnectedness, which entails the dissatisfaction of the need for connectedness (Sheldon et al., 2011), social connectedness encompasses various indicators of the satisfaction of connectedness needs, such as belongingness, acceptance, and social support (Baumeister & Leary, 1995; Twenge et al., 2007). Although social disconnectedness and connectedness are seemingly inverse, they are conceptually distinct constructs that elicit divergent motivational processes. For example, social disconnectedness is positively associated with Facebook use because people want to compensate for a social void via Facebook, while social connectedness is also positively associated with Facebook use because people tend to have positive experiences while using Facebook context (Sheldon et al., 2011). More broadly, social disconnectedness promotes intentions or behaviors that compensate for loneliness and social exclusion (DeWall et al., 2008; Twenge et al., 2007), while social connectedness promotes striving for deepening existing relationships and establishing new ones (Dang & Liu, 2022; Feeney & Collins, 2015).
Social connectedness may bolster people’s genuine interest in social interactions with robots. Considerable evidence indicates that social connectedness serves as a psychological resource for growth. In particular, social connectedness has been shown to promote active exploration of one’s social world (Dang & Liu, 2022; Mikulincer & Shaver, 2020) and engagement in novel experiences (Sedikides et al., 2015). For example, systematically experiencing satisfying social relationships encourages people to actively engage in interactions with strangers (Feeney et al., 2008), and social acceptance fuels group members’ desire for novel intergroup contact (Kunstman et al., 2013). Technology represents a novel experiential domain; social connectedness has been demonstrated to promote the exploratory tendency to acquire new experiences in human–technology interaction. For instance, a sense of belongingness positively predicts the perceptions of technological services (e.g., graphic-based emoticons used in instant messaging) as interesting and exciting (Jung et al., 2022). Other relevant research suggests that social connectedness mitigates customers’ discomfort when experiencing novel services provided by robots (Mende et al., 2019). Drawing on these conceptual and empirical insights, we argue that social connectedness bolsters genuine interest in social interactions with robots.
Genuine interest in social interactions with robots is expected to promote robot anthropomorphism because perceiving others as having humanness or mind is a prerequisite for establishing social relationships with them (Haslam, 2022). Accordingly, to engage in interactions with non-human agents, people inevitably treat the agents as sharing similar humanness with them. For example, people who show a greater willingness to include their pet in their social networks are more likely to anthropomorphize the pet (McConnell et al., 2011). More relevant to our research, extroverted people, who are characterized by having sincere interest in social interactions with animate and inanimate agents, are more likely to anthropomorphize robots than non-extroverted people (Arora et al., 2021; Kaplan et al., 2019). As interest in technology is a vital motivational determinant of responses to technological agents (Magni et al., 2010; Szalma, 2014), we posit that genuine interest in social interactions with robots promotes robot anthropomorphism.
The Present Research
Based on the theoretical rationale and empirical evidence discussed above, we hypothesized that:
Hypothesis 1 (H1): Social connectedness promotes robot anthropomorphism, and that the increased genuine interest in social interactions with robots mediates this effect.
We tested the hypotheses across three preregistered studies. Using a moral situation, Study 1 examined the effect of social connectedness on participants’ tendencies toward anthropomorphizing a robot subjected to abuse. Studies 2a and 2b explored the mediating role of genuine interest in social interactions with robots in the above effect. Specifically, Study 2a examined the effects of social connectedness on genuine interest and ensuing robot anthropomorphism, as well as the downstream outcomes (i.e., support for robotics research) of anthropomorphism. Study 2b manipulated genuine interest in human–robot interactions and examined its effect on robot anthropomorphism.
All data and analysis code have been made publicly available via Open Science Framework and can be accessed at https://osf.io/zv45e/. We preregistered Study 1 (https://osf.io/k97e4/?view_only=6cd8df0d5688432ab70eeaf8b438c201), Study 2a (https://osf.io/43ey8/?view_only=cbea671bef9c472aa82c8c2c0a8173c9), and Study 2b (https://osf.io/467zr/?view_only=5619062cbbce4252b4be83b3cd1acf29). Stimulus materials are provided in the Online Supplementary Material.
Study 1
Study 1 tested the effect of social connectedness on anthropomorphism in a moral situation in which a robot is mistreated because anthropomorphism is closely associated with moral consideration for non-human agents (Gray et al., 2007). We manipulated social connectedness by inducing social relationships of different quality (connectedness-satisfaction, connectedness-thwarting, and control). In line with our hypothesis that social connectedness promotes anthropomorphism, we predicted that participants in the connectedness-satisfaction condition would report greater robot anthropomorphism than those in the control condition. Given that socially connected (vs disconnected) people show more empathic concern for others’ misfortune (Twenge et al., 2007), we also predicted that participants in the connectedness-satisfaction condition would report greater robot anthropomorphism than those in the connectedness-thwarting condition. Furthermore, feeling connected to others leads to positive affect, which in turn, promotes sociality (Mikulincer & Shaver, 2001). Therefore, some doubts may persist regarding whether the positive effect of social connectedness on anthropomorphism is caused by positive affect. Study 1 examined whether this possibility could be excluded by measuring and controlling for positive affect.
Method
Participants
Based on a small-to-medium effect size (η2 = .040) and α = 0.05 (two-tailed, here and in all studies), an N of 237 would provide 80% power to detect the effect of social connectedness on anthropomorphism in our three-condition experiment. Aiming for high statistical power, we conservatively recruited 300 Chinese participants via Credamo (https://www.credamo.com). Participants who failed an attention check were automatically excluded by the system. One participant was excluded for not following directions in the recall task. The final sample comprised 299 participants (105 women, 194 men; 18–75 years old; Mage = 29.08 years, SD = 7.15 years). Participants were remunerated with 5 CNY. We randomly assigned participants into one of three conditions: connectedness-satisfaction (n = 104), control (n = 94), and connectedness-thwarting (n = 101).
Procedure and Materials
Social Connectedness Manipulation
We manipulated social connectedness using a paradigm similar to that of Bastian and Haslam (2010). In the connectedness-satisfaction condition, participants were instructed to recall times when they felt that they belonged with other people. In the connectedness-thwarting condition, they were instructed to recall times when they felt very lonely, excluded by others, or disconnected from others. In the control condition, participants were instructed to recall an everyday interaction they had with other people and then write about that experience in detail. As a manipulation check, participants completed eight items measuring social connectedness (e.g., “I feel close to people”; 1 = strongly disagree, 7 = strongly agree). Each item began with the phrase “Right now. . .” We averaged all items to create a social connectedness index (α = .97).
Affect
We assessed affective state with four affect-related items (Wildschut et al., 2006; i.e., happy, in a good mood, unhappy, and sad; 1 = strongly disagree, 7 = strongly agree). We created an affect index (α = .97) by averaging the ratings of positive affect and reversed ratings of negative affect, with higher scores indicating greater positive affect.
Robot Anthropomorphism
Participants watched a video clip in which a man used a chair to knock a robot over from behind (Bartneck & Keijsers, 2020). The video was a computer-generated model released by Corridor Digital in June 2019. The clip lasted 5s, and participants could view it repeatedly. Participants then indicated (1 = not at all, 7 = very much) how capable of thinking, having consciousness, having free will, experiencing pain, experiencing sadness, and experiencing anger they think the robot is. We averaged scores across mental capacities to create the anthropomorphism index (α = .95).
Results
Social connectedness scores differed among the three conditions, F(2, 296) = 611.31, p < .001, η2 = .805, 90% confidence interval (CI) = [0.775, 0.827]. Further planned comparisons revealed that participants in the connectedness-satisfaction condition (M = 6.23, SD = 0.51) reported greater social connectedness compared with those in the control (M = 5.16, SD = 1.12), t(296) = 24.10, p < .001, Cohen’s d = 2.80, 95% CI = [2.52, 3.05], and connectedness-thwarting (M = 2.28, SD = 0.79), t(296) = 33.94, p < .001, Cohen’s d = 3.94, 95% CI = [3.60, 4.25], conditions. Participants in the control condition reported greater social connectedness compared with those in the connectedness-thwarting condition, t(296) = 9.05, p < .001, Cohen’s d = 1.05, 95% CI = [0.84, 1.25]. Thus, the social connectedness manipulation was successful.
Participants across the three conditions differed in levels of robot anthropomorphism, F(2, 296) = 6.15, p = .002, η2 = .040, 90% CI = [0.009, 0.079]. Planned comparisons (Figure 1) revealed that anthropomorphism scores reported in the connectedness-satisfaction condition (M = 4.58, SD = 1.48) were higher than those in the connectedness-thwarting (M = 4.01, SD = 1.55), t(296) = 2.66, p = .008, Cohen’s d = 0.31, 95% CI = [0.12, 0.50], and control conditions (M = 3.87, SD = 1.55), t(296) = 3.29, p = .001, Cohen’s d = 0.38, 95% CI = [0.19, 0.57]. In addition, anthropomorphism scores did not differ between the connectedness-thwarting and control conditions, t(296) = 0.68, p = .505, Cohen’s d = 0.09, 95% CI = [−0.14, 0.31].
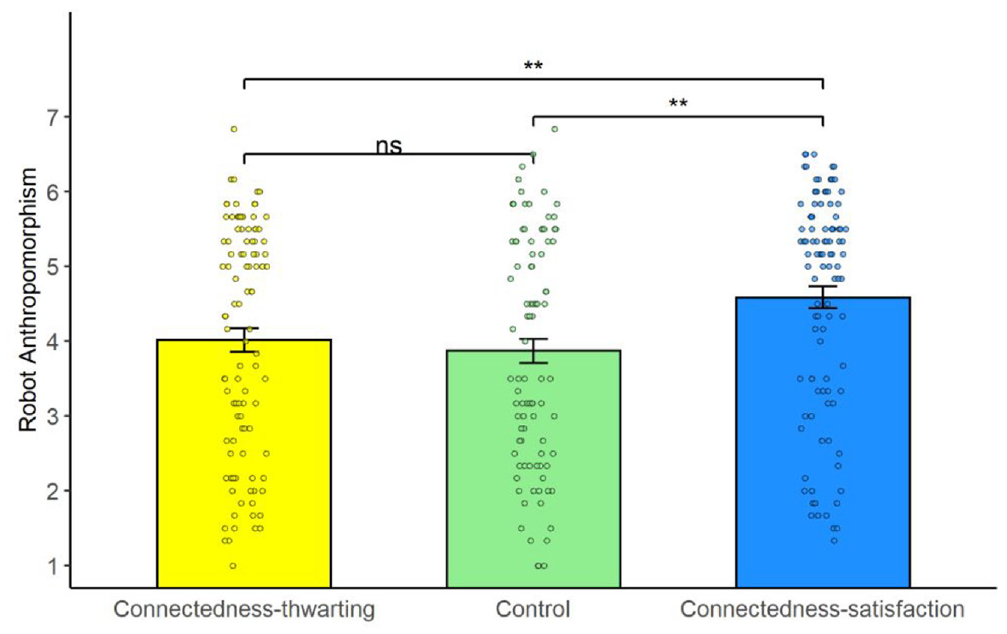
Robot Anthropomorphism Across Conditions in Study 1
Next, we tested whether positive affect could account for the effects of social connectedness on anthropomorphism, given that social connectedness can bolster positive affect. We conducted an ANCOVA with affect as a covariate. The effect of social connectedness on anthropomorphism remained significant, F(2, 295) = 4.98, p = .007, η2 = .033, 90% CI = [0.005, 0.069], after controlling for affect, F(2, 295) = 2.17, p = .142, η2 = .014, 90% CI = [0.000, 0.041]. These findings excluded transient affect as a possible explanation for the effect of social connectedness on robot anthropomorphism.
In line with our hypothesis, Study 1 demonstrated that social connectedness facilitated participants’ tendencies to anthropomorphize the abused robot and ruled out positive affect as a possible explanation. Anthropomorphism is closely associated with moral consideration for non-human agents (Gray et al., 2007); in line with this, our results suggest that social connectedness facilitated participants to treat the abused robot as an agent worthy of moral concern. Contrary to previous findings that lonely people are motivated to anthropomorphize non-human agents (Epley et al., 2008a, 2008b) compared with those in the control condition, participants in the connectedness-thwarting condition did not anthropomorphize the robot to a higher degree. This may be because although socially disconnected people anthropomorphize the non-human to compensate for loneliness (Mourey et al., 2017), they may not anthropomorphize agents that are less likely to provide a social connection, such as a robot being abused in this case. Previous research somewhat supports this possibility, indicating that socially disconnected people are unwilling to anthropomorphize non-human agents that cannot provide secure companionship (e.g., an object that they cannot own; Kwok et al., 2018).
Study 2a
We conducted Study 2a for two purposes. First, we measured genuine interest in social interactions with robots and examined whether it could account for the positive effect of social connectedness on robot anthropomorphism. To further explore whether the effect would exist regardless of the extent to which robots are able to provide social connection, we included two types of robots in the current study: a companion robot and a robot receptionist. Second, we aimed to explore the downstream outcomes of the positive effect of social connectedness on anthropomorphism. A recent meta-analysis of 78 studies (Roesler et al., 2021) revealed a medium-to-large positive effect of anthropomorphism on attitudes toward robots. Accordingly, we examined how social connectedness influences attitudes toward robots, particularly support for robotics research, via anthropomorphism.
Method
Participants
Based on the effect of social connectedness on anthropomorphism in Study 1 (η2 = .040), an N of 192 would provide 80% power to detect the effect of social connectedness on anthropomorphism in our two-condition experiment. We recruited Chinese participants via Credamo, remunerating each with 5 CNY. Participants who failed an attention check were automatically excluded by the system. The final sample included 200 participants (73 women, 127 men; 19–56 years old; Mage = 29.13 years, SD = 6.96 years). Participants were randomly assigned into either the connectedness-satisfaction condition (n = 100) or control condition (n = 100).
Procedure and Materials
Social Connectedness Manipulation
We manipulated social connectedness as in Study 1. Study 1 revealed that participants in the connectedness-thwarting and control conditions did not differ in key dependent variables; therefore, we only included the connectedness-satisfaction and control conditions in Study 2a. We used the same manipulation check items (α = .89) as in Study 1.
Genuine Interest in Human–Robot Interactions
We adapted items from Lavigne et al. (2011) to measure participants’ genuine interest in interpersonal relationships to assess interest in human–robot interactions (e.g., “I have a sincere interest in robots”; 1 = do not agree at all, 7 = completely agree). Parallel analysis extracted only one factor (Eigenvalue = 2.62). Exploratory factor analysis revealed that five items loaded on a single factor, which accounted for 52.32% of the variance (factor loadings = .573 ∼ .809). We averaged the responses to form an index (α = .76), with higher scores indicating greater interest in social interactions with robots.
Robot Anthropomorphism
We presented participants with pictures and descriptions of two robots: one was a robot receptionist (Xiaodu designed by Baidu; Figure 2A) and the other was a companion robot (Lovot designed by Groove X; Figure 2B). Xiaodu was described as a robot designed to improve convenience and efficiency, while Lovot was described as a robot designed to enhance levels of comfort and feelings of love. After reading the descriptions, participants indicated the extent to which they believed the robot to be capable of having a mind of its own, intentions, free will, consciousness, and thoughts and experiencing and expressing emotions. We averaged scores across mental capacities to create an anthropomorphism index for each robot (α = .94 for both robots, respectively).
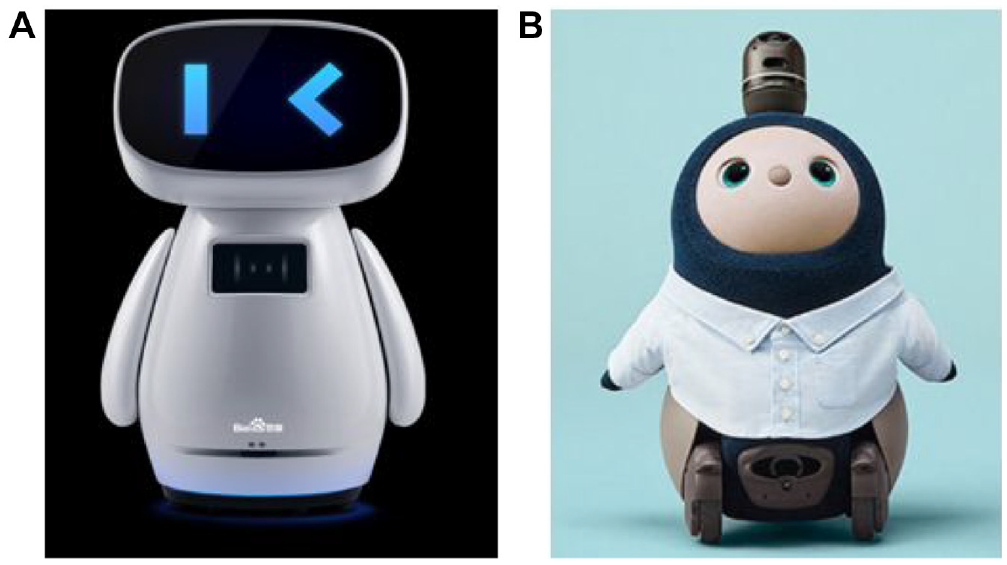
Pictures of the Robot Receptionist (A) and Companion Robot (B) Used in Study 2a
Support for Robotics Research
We separately measured support for research on the robot receptionist and the companion robot. We measured each construct using three items (e.g., “To what extent do you support research on [Xiaodu/Lovot]”; 1 = not at all, 7 = very much). We averaged scores across the three items to create composites from the robot receptionist (α = .87) and companion robot (α = .90), with higher values indicating more support for robotics research.
Results and Discussion
Participants in the connectedness-satisfaction condition (M = 6.19, SD = 0.79) reported greater social connectedness than those in the control condition (M = 5.19, SD = 1.06), F(1, 198) = 56.84, p < .001, η2 = .223, 90% CI = [0.143, 0.301]. Thus, the social connectedness manipulation was successful.
As shown in Table 1, compared with participants in the control condition, those in the connectedness-satisfaction condition reported greater genuine interest in social interactions with robots, higher anthropomorphic ratings of the robots, and more support for robotics research.
Responses to Robots Across Conditions in Study 2a
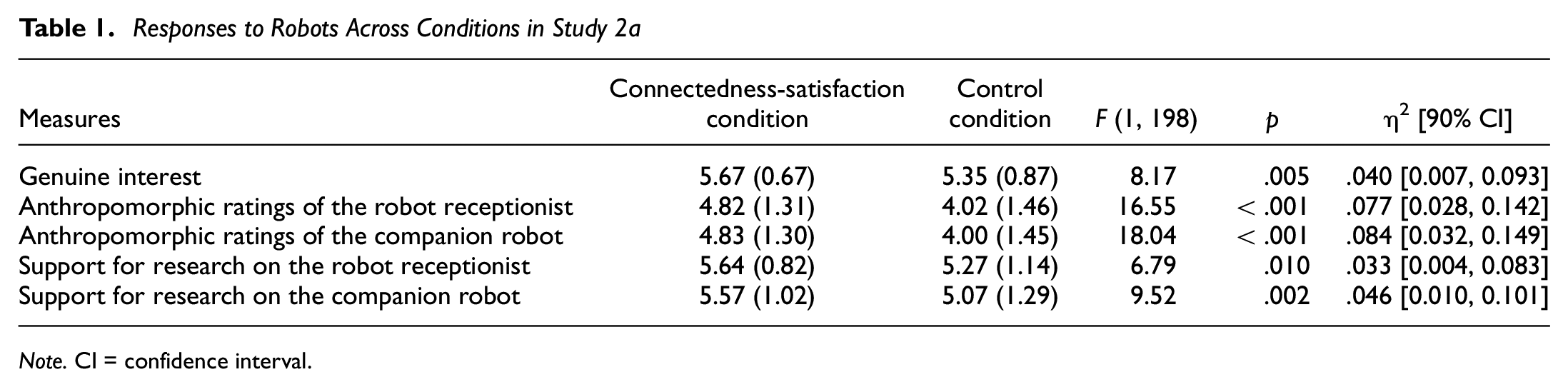
Note. CI = confidence interval.
To examine whether genuine interest in social interaction with robots could account for the effect of social connectedness on anthropomorphism, and whether social connectedness promoted positive attitudes toward AI robots via increased anthropomorphism, we tested a saturated model (Figure 3) using Mplus 7.0. Social connectedness enhanced interest in social interactions with robots (b = 0.31, 95% CI = [0.10, 0.53], SE = .11, z = 2.87, p = .005, b* = .20), which in turn positively predicted anthropomorphic ratings of the robot receptionist (b = 0.91, 95% CI = [0.69, 1.12], SE = .11, z = 8.31, p < .001, b* = .50), support for research on the robot receptionist (b = 0.49, 95% CI = [0.33, 0.65], SE = .08, z = 6.08, p < .001, b* = .38), anthropomorphic ratings of the companion robot (b = 0.93, 95% CI = [0.72, 1.14], SE = .11, z = 8.67, p < .001, b* = .51), and support for research on the companion robot (b = 0.40, 95% CI = [0.22, 0.57], SE = .09, z = 4.45, p < .001, b* = .26). Anthropomorphic ratings positively predicted support for robotics research for both the robot receptionist (b = 0.27, 95% CI = [0.19, 0.36], SE = .04, z = 6.28, p < .001, b* = .38) and the companion robot (b = 0.43, 95% CI = [0.33, 0.52], SE = .05, z = 8.97, p < .001, b* = .52). Controlling for interest in social interactions with robots, social connectedness promoted anthropomorphic ratings of the robot receptionist (b = 0.52, 95% CI = [0.18, 0.85], SE = .17, z = 2.99, p = .003, b* = .18) and the companion robot (b = 0.54, 95% CI = [0.21, 0.87], SE = .17, z = 3.18, p = .001, b* = .19). After controlling for interest in social interactions with robots and robot anthropomorphism, social connectedness did not promote support for research on either the robot receptionist (b = −0.01, 95% CI = [−0.23, 0.22], SE = .11, z = −0.05, p = .957, b* = −0.003) or the companion robot (b = 0.03, 95% CI = [−0.21, 0.27], SE = .12, z = 0.25, p = .806, b* = .01).
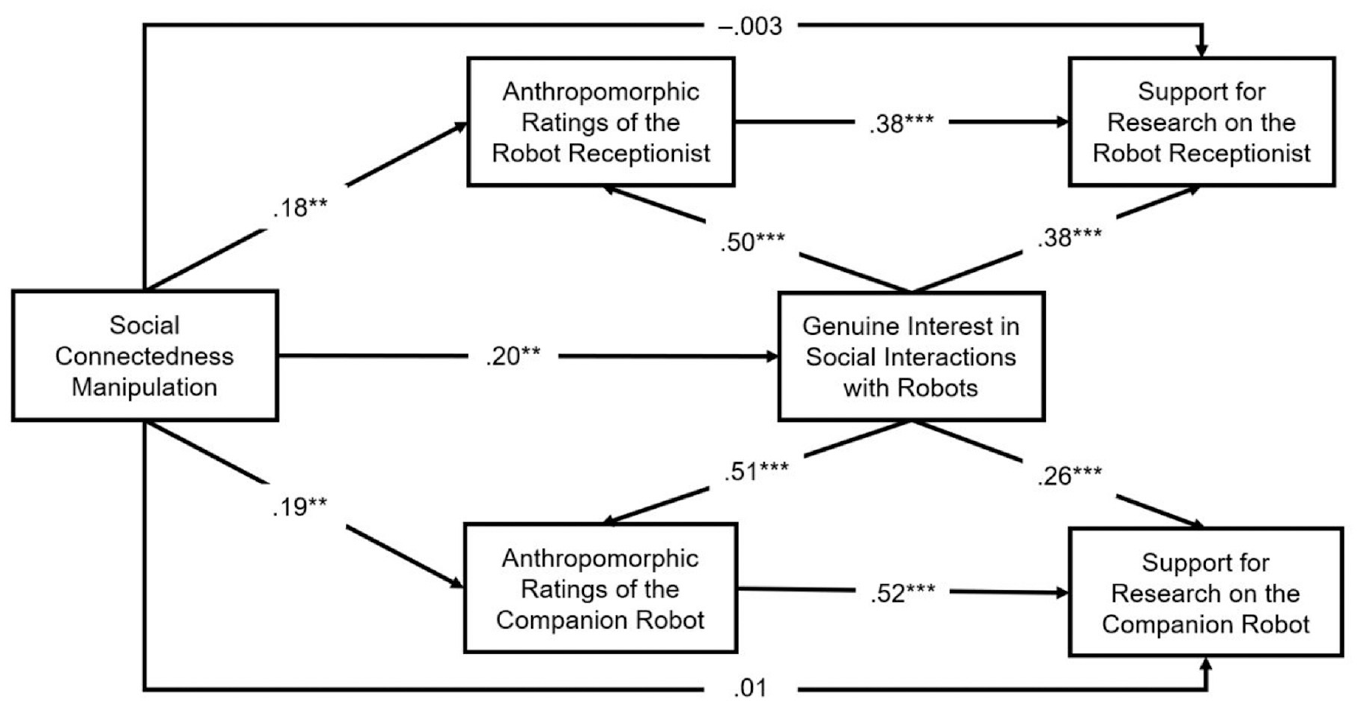
Effects of Social Connectedness on Anthropomorphic Ratings of and Support for Research on Robots Via Genuine Interest in Social Interactions With Robots in Study 2a
Furthermore, we used a bootstrapping procedure (5,000 samples) to test the significance of the mediating paths. Paths in which the 95% CI did not contain zero were considered statistically significant. As shown in Table 2, all indirect effects were significant. Therefore, social connectedness promoted robot anthropomorphism via increased genuine interest in social interactions with robots, thereby promoting support for robotics research.
Bootstrapping Effects and 95% CIs for Indirect Paths in Study 2a
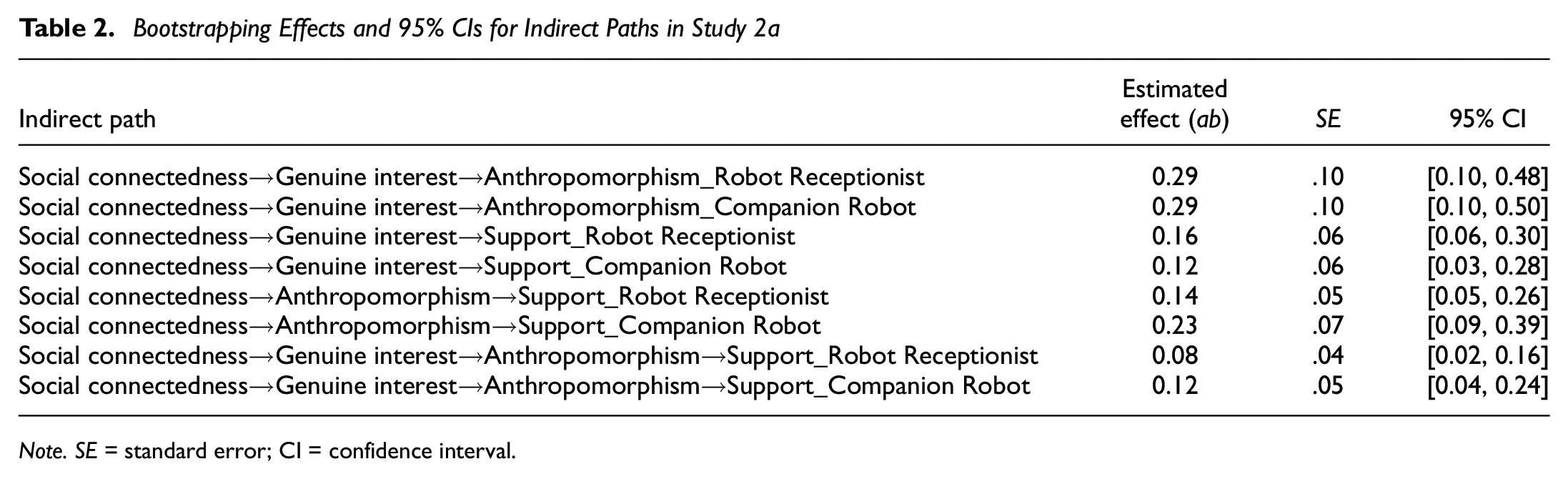
Note. SE = standard error; CI = confidence interval.
To examine whether the above indirect effects of social connectedness exist across “targets,” we also tested the tenability of an equality constraint on the absolute magnitude of the respective indirect effects on responses (i.e., anthropomorphic ratings and support) to different robots. For the anthropomorphic ratings of the robots, the equality constraint of the indirect effects of social connectedness via interest in social interaction with robots was tenable (Wald χ2 = 0.06, df = 1, p = .801). For support for robotics research, the equality constraint of the indirect effects of social connectedness via robot anthropomorphism was also tenable (Wald χ2 = 2.15, df = 1, p = .143). Taken together, in terms of absolute magnitude, the indirect effects on participants’ responses did not differ significantly between the two robots, suggesting that these indirect effects were not dependent on a specific robot.
The results of Study 2a indicated that the positive effect of social connectedness on anthropomorphism was related to an increased genuine interest in social interactions with non-human agents. Anthropomorphism bolstered by social connectedness promoted participants’ positive attitudes toward non-human agents. Moreover, direct comparisons between indirect pathways demonstrated the generality of these effects across different robots.
Study 2b
Using a measurement-of-mediation design, Study 2a revealed that genuine interest in social interactions with robots mediated the effect of social connectedness on robot anthropomorphism. In Study 2b, we manipulated genuine interest in social interactions with robots and tested its effect on robot anthropomorphism.
Method
Participants
The zero-order correlations between genuine interest in social interactions with robots and robot anthropomorphism from Study 2a were r = .53 (robot receptionist) and r = .55 (companion robot). Relying on their average correlation (r = .54) and α = .05, a sample size of N = 24 would provide 80% power to detect the effect of genuine interest in social interactions on robot anthropomorphism in our two-condition experiment. In anticipation of fluctuations in the effect sizes, we routinely and conservatively oversampled. We recruited Chinese participants via Credamo, remunerating each with 5 CNY. Participants who failed an attention check were automatically excluded by the system. The final sample included 100 participants (37 women, 63 men; 10–56 years old; Mage = 30.97 years, SD = 8.32 years). Participants were randomly assigned into either the connectedness-satisfaction (n = 50) or control (n = 50) condition.
Procedure and Materials
Manipulation of Genuine Interest in Human–Robot Interactions
We manipulated genuine interest in social interactions with robots using a paradigm similar to that of Wildschut et al. (2006; Study 4). Participants completed a six-item interest scale that we constructed for the purposes of this research. In the high genuine interest condition, we phrased each item so as to elicit agreement (e.g., “If I own a robot, I will probably deepen my interactions with the robot”), whereas, in the low genuine interest condition, we phrased each item so as to elicit disagreement (e.g., “If I own a robot, I will definitely deepen my interactions with the robot”). Next, participants received bogus feedback that their genuine interest score was either in the 68th (high genuine interest condition) or 32nd (low genuine interest condition) percentile among their peers. Then, participants were given at least 2 min to write down why they showed such high or low genuine interest in human–robot interactions. As intended, participants in the high genuine interest condition (M = 5.53, SD = 0.93) reported greater agreement with the items than those in the low genuine interest condition (M = 4.77, SD = 0.86, F(1, 98) = 17.79, p < .001, η2 = .154, 90% CI = [0.058, 0.260]. Finally, as a manipulation check, participants responded to the five items regarding genuine interest in social interactions with robots (α = .87) that we used in Study 2a.
Robot Anthropomorphism
As in Study 2a, we measured the extent to which participants anthropomorphized a robot receptionist and a companion robot. We averaged scores across mental capacities to create anthropomorphism indices for both robots (α = .91 and .92 for the robot receptionist and companion robot, respectively).
Results and Discussion
Participants in the high genuine interest condition (M = 5.78, SD = 0.62) reported greater interest in human–robot interactions than those in the low genuine interest condition (M = 4.88, SD = 1.11), F(1, 98) = 25.10, p < .001, η2 = .204, 90% CI = [0.096, 0.313]. Thus, genuine interest was successfully manipulated.
Next, we conducted a 2 (Genuine Interest: High, Low) × 2 (Robot Type: Robot Receptionist, Companion Robot) mixed-ANOVA to examine the effect of genuine interest in social interactions with robots on robot anthropomorphism. The results revealed a main effect of genuine interest, with participants in the high genuine interest condition (M = 4.77, SD = 1.10) reporting higher robot anthropomorphism ratings than those in the low genuine interest condition (M = 3.92, SD = 1.25), F(1, 98) = 12.85, p = .001, η2 = .116, 90% CI = [0.034, 0.218]. Neither the main effect of robot type (F(1, 98) = 1.43, p = .234, η2 = .014, 90% CI = [0.000, 0.075]) nor the two-way interaction (F(1, 98) = 0.31, p = .579, η2 = .003, 90% CI = [0.000, 0.045]) was significant, suggesting that the effect of genuine interest in social interactions with robots on robot anthropomorphism existed across targets.
Study 2b demonstrated the effect of genuine interest in social interaction with robots on robot anthropomorphism. Together, Studies 2a and 2b constituted an experimental-causal-chain approach to establish the direction of causality. Specifically, social connectedness bolstered genuine interest in social interactions with robots (Study 2a), which in turn promoted robot anthropomorphism (Study 2b).
General Discussion
Anthropomorphism is common and important in social life (Wan & Chen, 2021). Drawing on the motivated anthropomorphism approach (Waytz et al., 2010), the present research revealed that social connectedness promotes people’s genuine interest in robots, which in turn facilitates their tendencies toward anthropomorphizing robots.
The current research provides a new perspective on anthropomorphism. Although whether people should anthropomorphize non-human agents is ethically controversial (Coeckelbergh, 2021; Wynne, 2004), agreement is relatively widespread that anthropomorphism provides a sense of psychological closeness and can compensate for loneliness (Mourey et al., 2017; van Pinxteren et al., 2019). Beyond the well-known deficit-reduction orientation, we proposed a growth orientation of anthropomorphism. Specifically, socially connected people were more likely to anthropomorphize robots out of a genuine interest in social interactions with them. In addition, our findings indicated that growth-oriented anthropomorphism reflects people’s care about non-human agents and promotes acceptance of innovative technology. This complements and extends previous findings suggesting that anthropomorphism increases favorable responses to robots (Roesler et al., 2021). Therefore, the present research enriches the perspective that anthropomorphism is a communication tool (Karlsson, 2021).
Furthermore, the present research encourages us to re-evaluate the motivational mechanisms underlying anthropomorphism. Across three studies, we found that social connectedness promoted robot anthropomorphism. Most importantly, the effect existed regardless of whether a robot could provide social connection because socially connected people anthropomorphize non-human agents out of their genuine interest in robots. However, social disconnectedness could not induce greater robot anthropomorphism. Previous research on how social disconnectedness influences robot anthropomorphism has shown mixed results (Dang & Liu, 2023; Eyssel & Reich, 2013; Li et al., 2020; Ruijten et al., 2014). A possible reason might be that socially disconnected people anthropomorphize non-human agents out of the desire to restore social connection, and thus they are sensitive to whether robots can provide it. Stated differently, the effects of social disconnectedness on robot anthropomorphism are nuanced and may depend on robot characteristics and contexts. Therefore, a promising line of future research would involve systematically comparing the motivational mechanisms underlying socially disconnected and connected people’s tendency to anthropomorphize robots.
On a practical level, the present research encourages reconsideration of human–robot relationships. Harmonious human–robot relationships promote quality social relationships among humans (Gamez-Djokic & Waytz, 2020 ). Reversely, our findings suggest that people’s social relationships with humans affect their social relationships with robots. By extending previous practical strategies to design robots with humanlike features for eliciting more favorable responses (for a review, see Roesler et al., 2021), the current findings imply the possibility of promoting robot anthropomorphism by improving the quality of interpersonal relationships. This strategy is promising because social connection facilitates growth-oriented social interactions with robots and may prevent people from establishing dangerous emotional bonds with robots (Scheutz, 2011).
The limitations of present research also suggest directions for future research. First, we chose robots as targets for anthropomorphism. Compared with other familiar non-human agents (e.g., smartphones and computers), robots are powered by disruptive and complex technology; therefore, robot anthropomorphism may be associated more with people’s intention to explore the social world rather than their desire to compensate for the social void. Nevertheless, we posit that the positive effects of social connectedness on anthropomorphism found in the current research can extend to other targets with which people indeed have a genuine interest in interacting with socially. For example, people view their pets as friends or family members (McConnell et al., 2011) and see wildlife as part of their social community (Manfredo et al., 2020). Future research is certainly needed to test whether social connectedness promotes anthropomorphization of these agents. Second, future research could extend the generalizability of our findings from a cross-cultural perspective. Previous research has revealed that social connectedness promotes striving to broaden one’s social network and the inclusion of others in the self across cultures (Dang & Liu, 2022; Feeney & Collins, 2015; Turner et al., 2012, 2018); therefore, the effect of social connectedness on robot anthropomorphism may exist in both collectivistic and individualistic cultures. However, compared with Western cultures, East Asian cultures are more likely to hold the belief that all things have minds and value harmonious relationships between human and non-human entities (Dang & Liu, 2023; Kaplan, 2004). Therefore, more research is needed to replicate the current findings in populations with different cultural backgrounds.
Conclusion
We aimed to answer the essential question of why people anthropomorphize. Previous research revealed that lonely individuals show a greater tendency to engage in anthropomorphism, suggesting that anthropomorphism is driven by social deficits. However, we found that people who feel a sense of social connection show greater interest in robots, which promotes robot anthropomorphism. This growth-oriented perspective of anthropomorphism provides novel insights for the study of human–technology interaction and is worthy of further theoretical and practical considerations.
Supplemental Material
sj-docx-1-spp-10.1177_19485506231170917 – Supplemental material for Social Connectedness Promotes Robot Anthropomorphism
Supplemental material, sj-docx-1-spp-10.1177_19485506231170917 for Social Connectedness Promotes Robot Anthropomorphism by Jianning Dang and Li Liu in Social Psychological and Personality Science
Footnotes
Handling Editor: Veronika Job
Author Contributions
J. Dang and L. Liu conceived and designed the studies. J. Dang performed data collection and analyses. J. Dang and L. Liu drafted the manuscript and approved the final manuscript for submission.
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The authors gratefully acknowledge the financial support provided by the National Natural Science Foundation of China (32100869; 32271124), the Project of Humanities and Social Science Research of the Ministry of Education of China (21YJC190003), the Major Project of the National Social Science Foundation of China (18ZDA332), the Fundamental Research Funds for the Central University (2019NTSS30). The funders had no role in study design, data collection, decision to publish, or manuscript preparation.
Supplemental Material
Supplemental material is available online for this article.
Author Biographies
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.