
Abstract
Drivers need to constantly communicate their intention while sharing the road with other road users to attract attention, reduce confusion, and avoid collisions. With current advancements in the transportation system, particularly the increasing penetration of various levels of automation, the need to communicate intentions has become even more demanding and complex. Thus, it is critical to investigate the limitations and consequences of the existing communication channels and examine the need for improved communication. This study focused on two representative event types: lane change/merge and stop sign-controlled intersection in the SHRP 2 NDS dataset. Communication was deemed essential to the successful navigation of these maneuvers. Through exploratory analysis of driving behavior, insights were gained into the prevalence of lack of communication (LOC) among target events. Identified LOC events were further classified based on the scenario type. Moreover, descriptive observations of the interaction between drivers in these situations were developed and categorized.
Keywords
Introduction
People are willing to cooperate more to resolve a conflict when communication channels are open (Dawes et al., 1977). Therefore, given the near constant potential for conflict, communication is particularly important for drivers on the road. Drivers must understand other road users' behaviors and intentions to share the infrastructure safely and avoid confusion and collisions (Murata & Karwowski, 2021). However, without face-to-face communication, social channels for exchanging information between drivers are limited. Frequently used on-road communication channels include lights (e.g., headlights, turn signals, brake light, hazard light), horn, eye contact, and gestures (e.g., waving and nodding). These communication channels, however, have limited bandwidth, connectivity range, and information clarity. Consequently, drivers often struggle to understand the behavior of other drivers or road users (Haglund & Åberg, 2000).
Communication is an exchange of information between people to enhance the situational understanding of all parties (Stanciu et al., 2018). Miscommunications and incorrect expectations about other users’ behavior appear to explain about 5% of crashes (NHTSA, 2013). Furthermore, miscommunication safety concerns affect not only drivers but also vulnerable road users (Basford et al., 2002; Bíl, Bílová, and Müller, 2010; Jia et al., 2008). For instance, NHTSA (2014) showed that in 2014, around 26% of pedestrian and bicycle fatality crashes could be attributed to miscommunication and lack of communication (LOC). LOC includes situations where drivers did not communicate their intention when they were supposed to do, attempted to communicate but were unable to, failed to communicate (e.g., changed lanes without a turn signal), or miscommunicated (e.g., late signal or wrong signal). Despite these statistics, reasons why LOC and miscommunication occur on the road, particularly those that could be prevented, have not been fully explored (Manning, 2007).
With advancements in technology to promote and enhance communication among road users, it is critical to understand these communication issues at the event level. Most publicly available traffic crash data come from government agencies. These data, however, are mainly obtained from police crash reports, meaning a lack of detailed understanding of how these crashes occurred (National Center for Statistics and Analysis, 2022). This limitation is overcome in the SHRP 2 Naturalistic Driving Study (NDS), the most extensive study of its kind, which allows the assessment of drivers' interactions with the vehicle and traffic environment (Campbell, 2012). SHRP 2 data was collected with multiple sensors and onboard video cameras, providing opportunities to observe human driver behavior in various environmental conditions.
In this study, we explored the crash and near-crash events (i.e., safety-critical events or SCEs) in the SHRP 2 NDS dataset, focusing on two specific scenarios: (1) lane change/merge and (2) stop sign-controlled intersection. In these scenarios, communication between drivers was deemed essential to the successful navigation of the vehicle through these maneuvers. The primary interest was the prevalence of LOC, particularly LOC which contributes to an SCE, and the characteristics of these events. LOC was not limited to existing channels but any potential needs of intention communication that would provide benefit in these cases. The main goal was to better understand the LOC issue to support the development of future remedies.
Through exploratory analysis of driving behavior during the identified events, insights were gained into the prevalence of LOC among target events. Identified LOC events were further classified based on the scenario type. Moreover, descriptive observations of the interaction between drivers in these situations were developed and categorized (e.g., contributing factors, communication issues, and other consequences), which could contribute to future efforts to improve intention communication.
Method
Database
This work leveraged the SHRP 2 NDS dataset (Antin et al., 2019), which included vehicle kinematics and video for over 5.5 million trips taken by over 3,500 participants. The SHRP 2 NDS was conducted at six different sites across the United States, encompassing about 32 million miles of driving data. These trips resulted in nearly 9000 SCEs, consisting of nearly 2000 identified crash events and approximately 7000 identified near-crash events. The SHRP 2 NDS gathered and stored data from forward radar, four cameras, accelerometers, vehicle network, GPS, and onboard computer vision algorithms.
Data Preprocessing
Initial Queries for SCEs by Event Type.
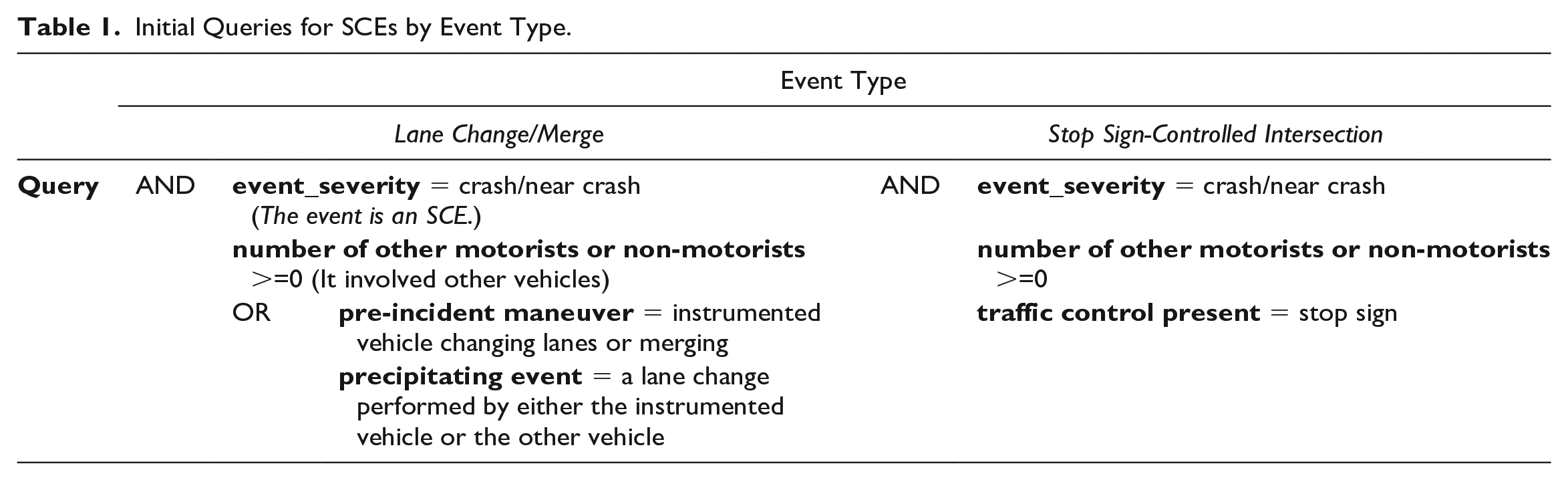
To further isolate SCEs with potential communication issues, the presence of any of the following driver behaviors was required: (1) failed to signal/improper signal; (2) right-of-way (ROW) error with another vehicle or person; and (3) aggressive driving. In these situations, “signal” encompassed all communication attempts (e.g., turn signal, headlights, gestures), ROW errors emphasized circumstances that were challenging to solve with current communication channels, and aggressive driving focused on situations where carelessness towards other road users and failure of communication intention were present. In this context, a lack of communication while driving was seen as a form of passive aggression.
The filtered and selected relevant events then underwent manual data annotation, where trained researchers reviewed the event videos frame by frame to perform additional coding of variables of interest. These variables included: (1) timestamps of key events (i.e., event initiation, turn signal activation); (2) turn signals need and usage by vehicles involved; (3) additional communication attempts discerned from video (e.g., flashing headlights, gestures); (4) presence of obstructions that prevented full visibility of signals by any involved vehicle; (5) reactions and emotions exhibited by the instrumented vehicle driver; (6) reactions exhibited by the non-instrumented vehicle(s) involved; (7) presence of factors such as ROW ambiguity and communication needs/failures; and (8) a narrative description of the events based on video data. The assessment of emotions was guided by previous work, where emotion classification was based on facial expressions (Matsumoto, 2011).
Results
Prevalence of LOC
A total of 2042 lane change/merge SCEs and 217 stop sign-controlled intersection movements were captured by the initial queries as candidates. Ultimately, 102 lane change/merge cases and 17 stop sign-controlled intersection cases had LOC present. The resulting proportions of events with LOC (see Table 2) were similar to the findings of the NHTSA study, where miscommunications and false expectations about the other user's behavior contributed to 5% of crashes (NHTSA, 2013).
The Prevalence of LOC by Event Type.

Contributing Factors
Through data annotation, one or more contributing factors were assigned to each SCE. The complete collection of contributing factors included ROW ambiguity, carelessness, and communication issues (as shown in Figure 1). The leading contributing factor for lane change/merge events was communication (e.g., improper or absence of signaling). The leading contributing factors to stop sign-controlled intersection events were ROW ambiguity and carelessness. While ROW ambiguity was a common issue at stop sign-controlled intersections, the solution to that issue is beyond the bandwidth of existing communication channels, especially when drivers use no turn signal or are inattentive to other traffic.

Event distribution by contributing factors.
Figure 1 summarizes the distribution of contributing factors for all SCEs. Communication and carelessness were the most frequent classifications. The communication factor (usage issues of existing channels, which were mostly associated with turn signal use) was further divided into multiple categories including communication attempt not made, communication attempted late, communication not received, heeded, communication wrong/confusing, and communication failure type unknown.
Pre-Scenario Typology
With all SCEs of interest in the SHRP 2 NDS identified and coded, it became possible to gain insights into the root cause of each LOC instance. The scenario typology analysis, consisting of pre-event vehicle movements and the contributing factors immediately prior to an SCE, provided an additional layer of information to categorize instances of LOC. The findings were expected to create a framework to identify causes and highly LOC-prone scenarios and contribute to potential remedies for crashes linked to LOC via improved intention communication.
Pre-scenario typology was primarily reconstructed based on the narrative event extracted from video data which clearly described the event sequence from 5 seconds before the conflict started (i.e., the beginning of the state of environment or action that began the event sequence) until the conflict ended. The narrative contained information about road configuration, environment, vehicle behaviors, driver behavior, driver reaction, and event outcome, from which, together with other reduced variables, a safety-critical event could be reconstructed. For example, “Subject Vehicle (SV) is trying to change lanes to the left to go around another vehicle merging from the right. SV signals and immediately starts to move left, but Other Vehicle (OV) is in the blind spot. SV swerves back into the lane and brakes while OV passes.”
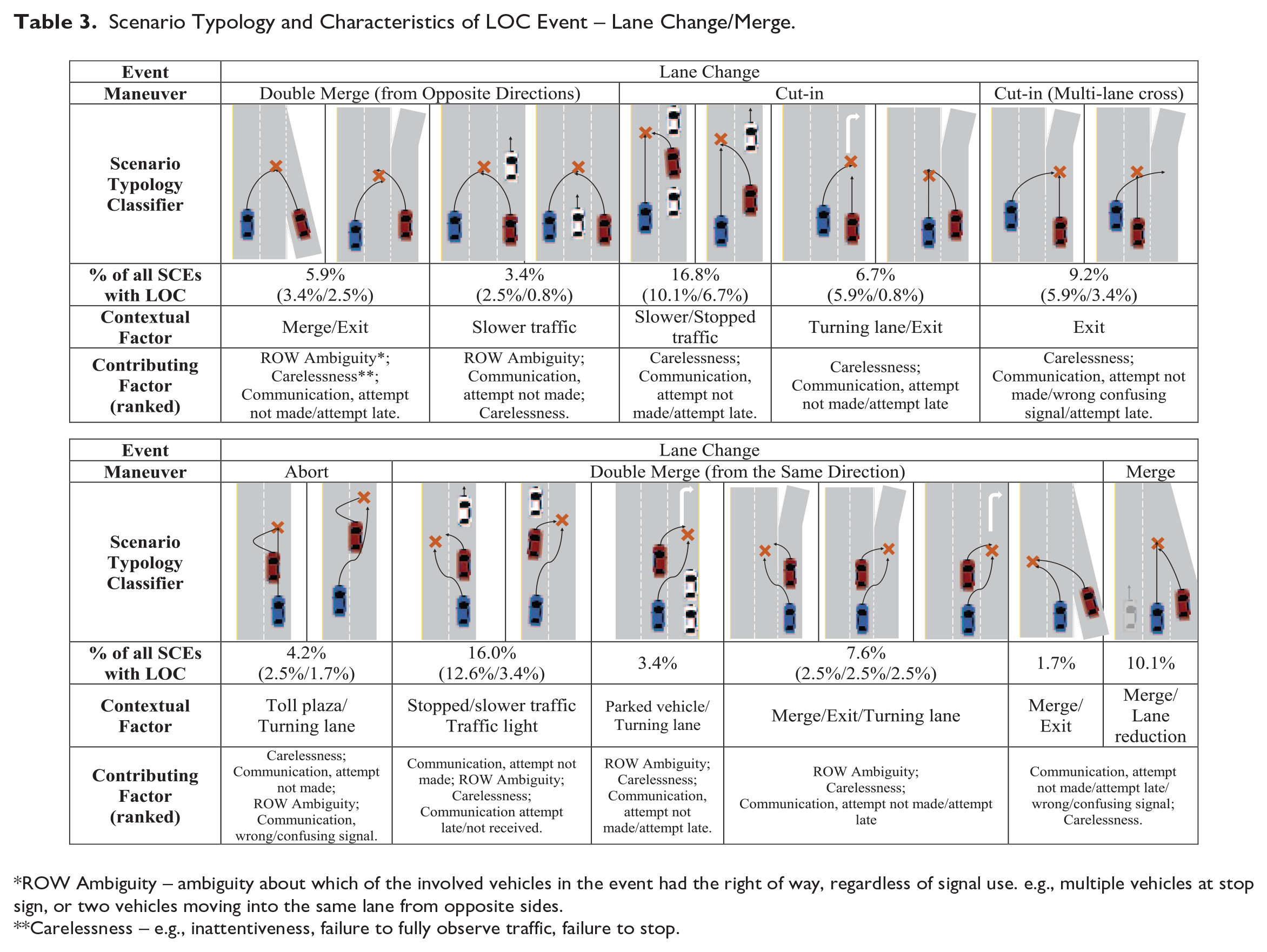
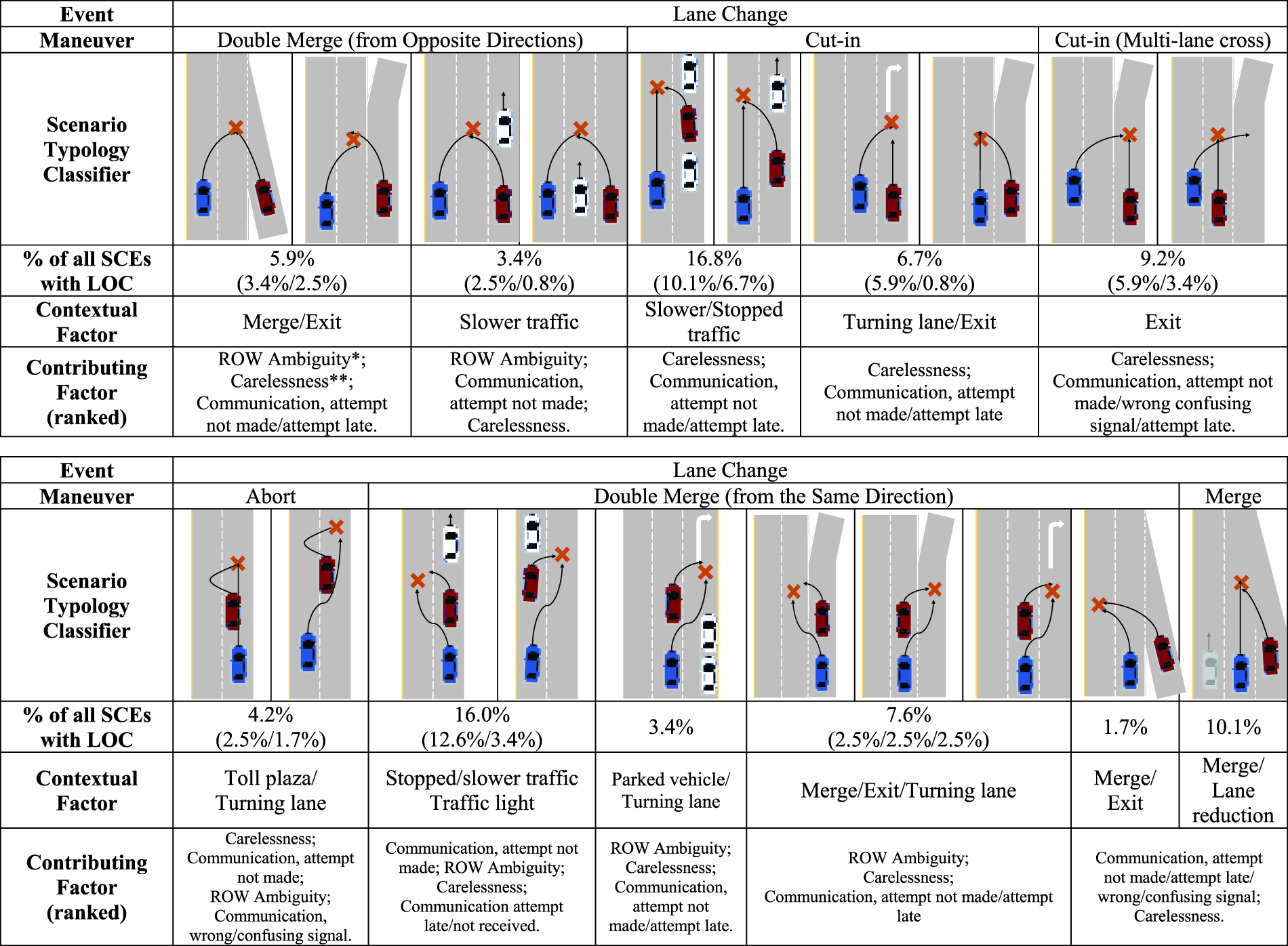
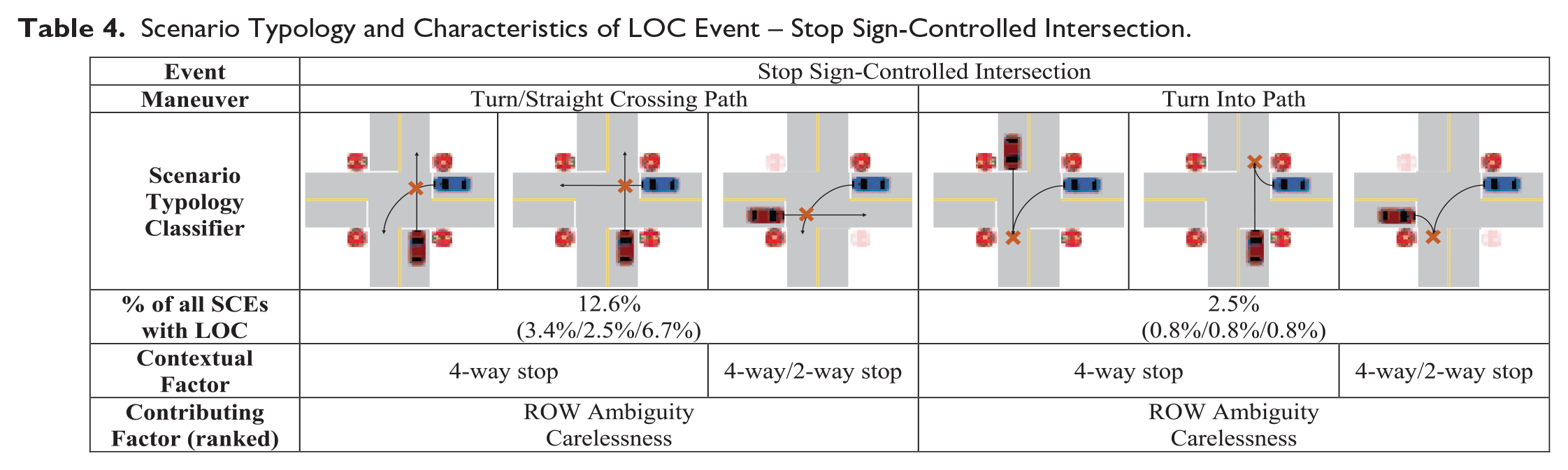
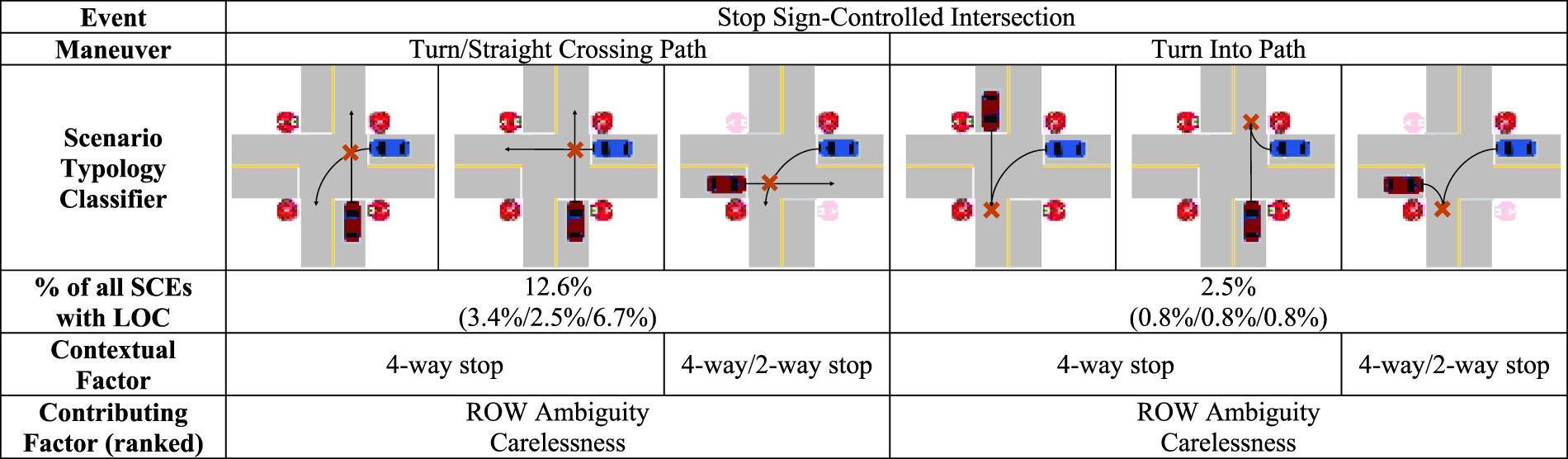
Table 3 and Table 4 summarize the reconstructed typology and other identified characteristics of SCEs by event type and maneuver. Red and blue vehicles in the scenario illustrations represent those involved in the conflicting events, while white vehicles represent other traffic vehicles.
Scenario Typology and Characteristics of LOC Event – Lane Change/Merge.
Scenario Typology and Characteristics of LOC Event – Stop Sign-Controlled Intersection.
For lane change/merge, the top two maneuver categories (cut-in (16.8% of all SCEs) and same-direction double merge (16.0%)) were related to slower or stopped traffic, and so was the opposite-direction double merge (3.4%). In these events, drivers tended to initiate the maneuver at the last minute (i.e., with small TTC) without paying attention to other traffic or communicating their intention correctly. After slower/stopped traffic, the second leading contextual factor was the change of lane number or shape, including highway exit, merging lane, acceleration lane ends, turning lane, and road splitting. Among these, highway exits or turning lanes were present in multi-lane cross-cut-ins (9.2%), same-direction double merges (7.6%), and cut-ins (6.7%). These road features were also observed in opposite-direction double merge (5.9%) and lane change abort (4.2%) maneuvers. Merging lanes were present in single merge (10.1%), opposite-direction double merge (5.9%), same-direction double merge (1.7%), and lane change abort (4.2%) maneuvers.
Lane change/merge SCEs were also frequently observed in two unique environments: (1) approaching or leaving toll plaza when lanes are merging/splitting (abort of the lane change - 4.2%), and (2) parked vehicle-occupied lane becomes clear (same-direction double merge - 3.4%).
For stop sign-controlled intersection events, turn/straight-crossing-path was more frequently experienced (12.6% vs. 2.5%) than turn-into-path; both were observed at either 4-way or 2-way stop intersections.
Communication Challenges
Given that the LOC was deemed a primary cause of these SCEs, it was found that each event type had its unique communication challenges and that multiple challenges could be associated with one event.
The primary communication challenge in lane change/merge events was no or improper signal use (88.2%), likely due to the time constraint drivers face in a dynamic environment at high speed. With that time constraint, drivers would choose not to use the turn signal, use it after the maneuver started––confirming their action rather than requesting access, or use it in other incorrect ways, such as crossing multiple lanes with one signal activation. Such behavior created a barrier for other road users to understand the ego driver's intention and react promptly. Moreover, in 8.8% of lane change/merge events, the turn signal was visually obstructed.
For stop sign-controlled intersections, the primary communication challenge shifted to ROW ambiguity (94.1%), followed by turn signal obstruction (23.5%). The lack of understanding of other parties' intentions (e.g., move or wait) often led to confusion about who should move first, which resulted in an SCE. This confusion cannot be directly addressed by turn signal use. Eye contact and hand gestures could be helpful in this situation, but these communication approaches are very prone to visual obstruction.
Other Consequences
LOC was not only associated with the occurrence of SCEs but also potentially had emotional and behavioral influences on drivers involved. According to data annotation, over 98% of SV drivers had neutral emotions before the event. After the event, a range of emotions was observed––surprise (42%), disbelief/disapproval (20%), fear/anxiety/anxious (11%), neutral or other (5%). Anger/distrust/aggression was developed in 21% of events. Moreover, road rage was observed in 11% of events (all being lane change/merge), among SV and OV drivers, in the form of cutting off, brake check, tailgating, and blocking, accompanied by yelling, gesturing, honking, and flashing headlights.
Discussion and Conclusion
When we sit behind the wheel, the bandwidth of our communication channels becomes narrower. At the same time, the demand for clear intention communication grows in order to share the infrastructure safely, reduce confusion, and avoid collisions. As a result, a key question is whether any safety concerns arise due to the limited communication channels available to drivers while on the road? If so, what are the specific needs for improved intention communication?
This study tried to seek these answers using the SHRP 2 NDS dataset. Initially, it assessed the prevalence of LOC that led to SCEs. Two representative event types, lane change/merge and stop signs-controlled intersection, were selected as the primary focus. A total of 102 lane change/merge SCEs and 17 stop sign-controlled intersection SCEs were found to be related to LOC. These accounted for 5.0% of all lane change/merge SCEs and 7.8% of all stop sign-controlled intersection SCEs in the SHRP 2 NDS dataset.
These 119 SCEs were manually coded and characterized to better understand the root causes and help identify potential future remedies. The scenario typology analysis, consisting of pre-event vehicle movements and the environmental factors immediately prior to an SCE, provided insights into the LOC events. Cut-in and same-direction double merge were the leading maneuvers for lane change/merge events, followed by merge, opposite-direction double merge, and abort of the lane change. These events were commonly seen around slower or stopped traffic or where the number of lanes changed. For stop sign-controlled intersection events, turn/straight-crossing-path occurred more frequently than turn-into-path, and both of these actions were observed at either 4-way or 2-way stop intersections.
The leading contributing factors for lane change/merge events were communication-related issues (mostly turn signal use), followed by carelessness and ROW ambiguity. In contrast, stop sign-controlled intersection events were most often attributed to ROW ambiguity and carelessness. Similarly, the specific communication challenges observed varied between lane change/merge and stop sign-controlled intersections events. During lane change/merge events, the primary issue was no or improper (e.g., late) signal use. Drivers would choose not to use the turn signal or to use it after the maneuver started, particularly when the time was a constraint. The primary issue at stop sign-controlled intersections was ROW ambiguity, even with proper signal use. The turn signal and other alternative signaling, such as gestures or headlights, have their limitations––either they are insufficient in this situation, or they can be visually obstructed and need more saliency.
Last but not least, emotional and behavioral consequences were evaluated among SCEs with LOC. SV drivers showed various negative emotions after the event, including extreme cases (anger/distrust/aggression, 21%). Moreover, road rage was frequently (11%) developed and observed among SV/OV drivers after the event.
The naturalistic data offered valuable insights into the issues with communication of intention on the road. By analyzing representative events, the potential need for improved communication was revealed. For communication issue-dominated events, such as lane changes/merges around slower or stopped traffic or where the number of lanes change, promoting the proper use of existing communication channels, such as turn signals, would be the obvious answer. Moreover, expanding the communication bandwidth by introducing new channels could offer direct benefits if it can automate the communication of intention in situations with a time constraint or with careless drivers and if those channels are impervious to visual obstructions. For ROW ambiguity and carelessness, new channels with explicit and unobstructed communication would solve the conflict and confusion, reduce distracted and aggressive drivers, and promote kinder interactions.
Limitations–This study focused only on the exploratory analysis of SCEs. Future studies should expand the data selection to include baseline events (where no crashes or near-crashes occurred) in order to assess the safety impacts of LOC and individual contributing factors statistically. Future efforts should also explore additional event types requiring interactions between drivers, and between drivers and others, such as vulnerable road users. In addition, although drivers’ emotions before and after SCE and reactions were explored, accurately determining the source of these emotions and reactions and their correlation with LOC is challenging with the data available. Additional data annotations of SCEs without LOC are necessary to further assess it. Lastly, introducing new communication channels has the potential to increase users’ workload which has to be addressed in future studies.