
Abstract
Exoskeletons have the potential to support daily activities by assisting the movement performance. Previous studies have shown that powered elbow exoskeletons can reduce muscle effort during continuous cyclic movement. However, natural movements have embedded stationary hold periods as well as transitions between postures. The human performance when using exoskeletons for more natural movements should be evaluated. In this study, we implemented visual and haptic electromyography (EMG) biofeedback to help people use an upper limb exoskeleton to perform a target position matching task. Participants (n=36) did not significantly reduce their muscle effort during hold periods when provided with biofeedback. Participants had difficulty relaxing their muscles at more flexed postures during hold periods, suggesting that they continued to provide effort instead of taking advantage of the device. To fully benefit from robotic exoskeletons, additional training and more advanced controllers might be needed.
Introduction
Exoskeletons are wearable robotics designed to assist human movement. One targeted goal of robotic exoskeletons is to reduce muscle effort to save energy. Researchers have designed both passive and active exoskeletons to achieve this goal. While progress has been made in lower-extremity exoskeletons showing effectiveness in energy reduction (Zhang, 2017; Mooney, 2014; Cain, 2007), many successful cases in upper limb exoskeletons are still restricted to passive exoskeletons in very specific tasks, such as repetitive lifting, overhead working, etc. (Alemi, 2020; Baltrusch, 2020; Schmalz, 2019). Active exoskeletons exhibit greater adaptability and potential due to their capacity to provide any torque-time profile and introduce a net positive mechanical work. Lenzi et al. showed that an elbow powered exoskeleton can reduce effort during cyclic movements in a simple proportional electromyography (EMG) controller (Lenzi, 2012). However, natural movements are more complex than cyclic movements as they often require the person to hold positions. To fully benefit from the exoskeleton when the goal is to minimize energy, users are expected to generate less effort during the movement and relax during the hold periods. It is currently unknown whether benefits are maintained as motion complexity increases.
One way to improve muscle control is to provide EMG biofeedback so that users can observe and modulate the myoelectric signals. Studies have shown that people could volitionally control single muscle activation with the help of visual or aural EMG biofeedback (Basmajian, 1963). Researchers also found that visual EMG biofeedback allowed myoelectric prosthesis users to control the force with less variability and with a finer resolution (Dosen, 2015). Therefore, providing EMG feedback to EMG-based exoskeleton users might allow them to adjust their muscle activation accordingly, and thus take advantage of the device (i.e., decrease muscle effort during usage).
In this study, we examined if visual and haptic EMG biofeedback reduced muscle effort during a motion requiring transitory and hold periods. We hypothesized that participants provided with biofeedback would decrease muscle effort compared to participants with no feedback. Understanding how people use the powered upper limb exoskeletons in more complex movements and with EMG biofeedback can provide a foundation for future user training method and controller development.
Methods
Participants
Forty-three healthy young adults consented to participate in the study, and thirty-six (n=36; 18 F, 18 M; age: 23.3 ± 3.5 years; mass: 68.9 ± 16.1 kg; height: 1.69 ± 0.10 m; mean ± standard deviation) completed the study. Participants had no experience with upper limb exoskeletons and had no upper limb injuries in the past 6 months. All participants provided written informed consent approved by the University of Michigan Institutional Review Board (HUM00213716). Seven participants out of forty-three withdrew from the study due to EMG sensor issues (n=5) or discomfort during the study due to the weight of the exoskeleton (n=2).
Exoskeleton
A portable right-arm EMG-based upper limb exoskeleton (Model: Mark, Myomo, Inc. Boston, MA) was used in this study. The device provided torque assistance at the elbow. The biceps and triceps muscle activities were collected with noninvasive dry EMG sensors (bipolar electrodes with an integrated ground reference, EMG sampling rate: 1kHz), and the signals were smoothed using a Kalman filter and a 4th order bandpass filter from 100 to 200 Hz. The filtered EMG signals were multiplied by a biceps gain (kb) and a triceps gain (kt), respectively. The exoskeleton was connected to a laptop via a USB cable for data recording (data streaming rate: 10 Hz). Prior to donning the exoskeleton, participants were instructed to clean the skin with alcohol to support sensor contact.
The exoskeleton was in the dual mode during the study, where both biceps and triceps signals are used to control the exoskeleton motor. In this dual mode, the controller drove the elbow motor at a speed (θ̇) proportional to the difference between biceps EMG signal and triceps EMG signal (∆e) when above a threshold. When ∆e was below the threshold, the motor speed θ̇ remained 0.
Biofeedback
EMG biofeedback was provided to targeted groups of participants through a visual or haptic display. Visual feedback displayed the real-time ∆e to participants (Figure 1a). The direction of the desired ∆e was also highlighted so that participants knew how they should change their muscle activation during the task. Haptic feedback conveyed real-time ∆e by vibrating the corresponding haptic motor (Figure 1b). For example, the biceps haptic motor would vibrate if biceps signal was much larger, and the exoskeleton was going to flex. The haptic motors (Model No.307-103, Precision Microdrives Ltd., London, UK) were attached to the forearm and wire-connected to an off-board Raspberry Pi (Model: 4B, Cambridge, UK).
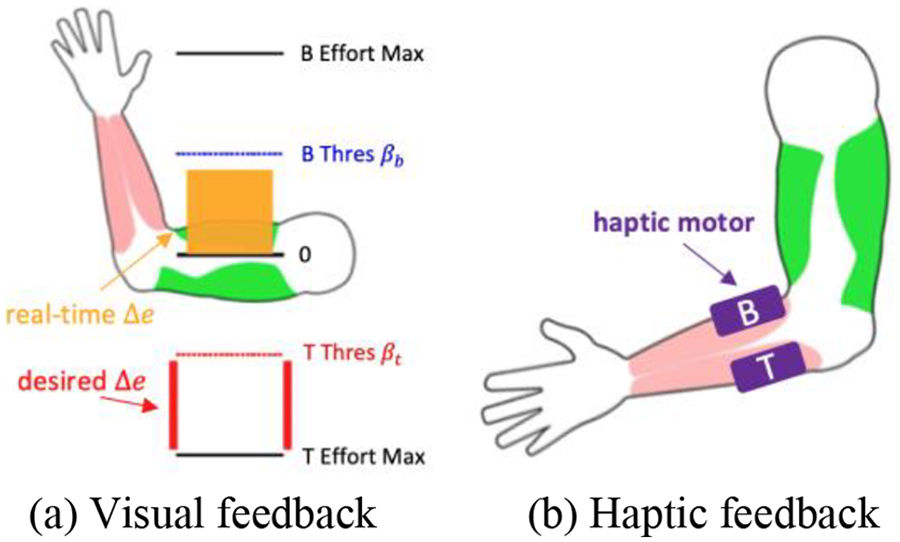
Two types of biofeedback were provided to different participants. (a) Visual feedback displayed the real-time ∆e in an orange bar, as well as the desired ∆e. (b) Haptic feedback indicated the direction of ∆e by vibrating the haptic motors.
Experimental Protocol
Participants were first trained how to use the exoskeleton (both initiating movements and relaxing their muscles at different elbow angles). Then participants went through a tuning process where controller gains (kb and kt) were personalized. The participant was instructed to flex and extend their elbow, and the experimenter tuned the gains based on the feedback until participants could no longer feel any improvement after the adjustment. Typically, the tuning procedure took 5-10 minutes for each participant. Then participants were randomly assigned into one of the three groups: None, Visual, or Haptic. Each group had 12 participants (6F, 6M). Participants in Visual and Haptic groups received instructions on how the respective feedback modalities worked but did not engage in any biofeedback practice prior to the actual task.
Participants were asked to perform a 4-module target position matching task. In each module, participants matched the elbow angle to the target displayed on the screen (Figure 2). The red dot represented the real-time elbow angle, and participants were asked to keep the red dot in the blue region (range: ±5 degree). Each module consisted of 18 sets, with half of the sets handfree (‘Without Obj’) and the rest sets holding a 2 lb. dumbbell (‘With Obj’). Three pre-selected elbow angles (20°, 50°, 80°) generated 6 unique trajectories (starting from one to the other two), forming a single set. Each trajectory consisted of 1 second of initial angle and 5 seconds of final angle, including both transitory and hold periods. An additional 9 seconds was given at the beginning of each set to transit between sets. Participants were asked to:
Track the target as quickly and accurately as possible.
Minimize muscle efforts throughout the experiment.
Participants in each group completed 4 modules based on their assigned group. The task was identical in all modules. All participants had no feedback in their first and third modules (M1, M3). In the second and fourth module (M2, M4), participants received the corresponding feedback, respectively. Each module lasted about 15 minutes, and a 5-minute break was given between modules. The sequence of modules in each group was as follows, with N, V, H corresponding to No feedback, Visual feedback, and Haptic feedback, respectively:
None: M1(N) – M2(N) – M3(N) – M4(N)
Visual: M1(N) – M2(V) – M3(N) – M4(V)
Haptic: M1(N) – M2(H) – M3(N) – M4(H)

The target position matching task (with 1 sample set shown). The red dot represents the real-time elbow angle. Each set consists of 6 unique trajectories, and each trajectory consists of 1 second of initial elbow angle and 5 seconds of final elbow angle. A 9-second transition time was given at the beginning.
Data and Statistical Analysis
Performance was evaluated using the mean EMG values during the final second of the hold period, termed the hold EMG was further normalized for each participant and muscle separately, using the average peak value of the largest trajectories in the ‘Without Obj’ sets in M1 (i.e., from 20° to 80° for biceps and from 80° to 20° for triceps). These specific trajectories were chosen as they required the highest muscle activation. Ideally, participants could fully relax their muscles as the exoskeleton would hold the position and hold EMG should be close to zero.
The collected data were analyzed using MATLAB (MathWorks, Natick, MA, USA). The hold EMG values were log-transformed to meet the assumptions of normality and homogeneity. A five-way mixed ANOVA was fit for hold EMG with four within-subjects factors (elbow angle: 20°, 50°, 80°; module: M1, M2, M3, M4; muscle: biceps, triceps; condition: Without Obj, With Obj) and a between-subjects factor (group: None, Visual, Haptic). Post-hoc pairwise comparisons were performed and 95% confidence intervals (CIm: 95% confidence interval on the mean; CId: 95% confidence interval on the difference in the mean) were calculated. Cohen’s d effect size was calculated for each pairwise comparison: small effect 0.2 < |d| < 0.5, medium effect 0.5 < |d| < 0.8, large effect |d| > 0.8 (Cohen, 2013).
Results
Hold EMG demonstrated a significant three-way interaction among Elbow Angle – Muscle – Condition (Figure 3a). Specifically, hold EMG for the biceps increased significantly as the arm flexed under each condition, showing statistically significant differences across 20°, 50°, and 80° (0.625<|d|<1.927). On the contrary, hold EMG stayed highest for triceps at 20° and decreased to lower values at 50° and 80° under each condition, with significant differences between 20° and 50°, 20° and 80° (0.401<|d|<0.586). Additionally, the weight significantly increased hold EMG for the biceps under each elbow angle (0.295<|d|<1.198). Although the weight also affected the triceps, the effect was relatively small, with a significant level observed only at 80° (CId: [0.005, 0.036], |d|=0.305). Significant interaction effects were also observed among Elbow Angle – Muscle – Group (Figure 3b), but the different groups exhibited similar trends, and significant differences were only observed between the Haptic group and the other two groups in the biceps at 50° (0.308<|d|<0.339), and between the None group and the other two groups in the triceps at 80° (0.485<|d|<0.609). Additionally, a significant interaction was observed between Module – Muscle, where hold EMG decreased significantly from M1 to M2 for both biceps (CId: [0.058, 0.130], d=0.495) and triceps (CId: [0.026, 0.062], d=0.470) and then remained relatively stable after M2 (|d|<0.084) (Figure 3c). Similar trends were observed for interactions between Module – Group and Module – Elbow Angle, with a drop-off in values from M1-M2, followed by consistent values from M2-M4 (Group: M1-M2: 0.318<|d|<0.458, M2-M4: 0.005<|d|<0.130; Elbow Angle: M1-M2: 0.140<|d|<0.897, M2-M4: 0.011<|d|<0.080).
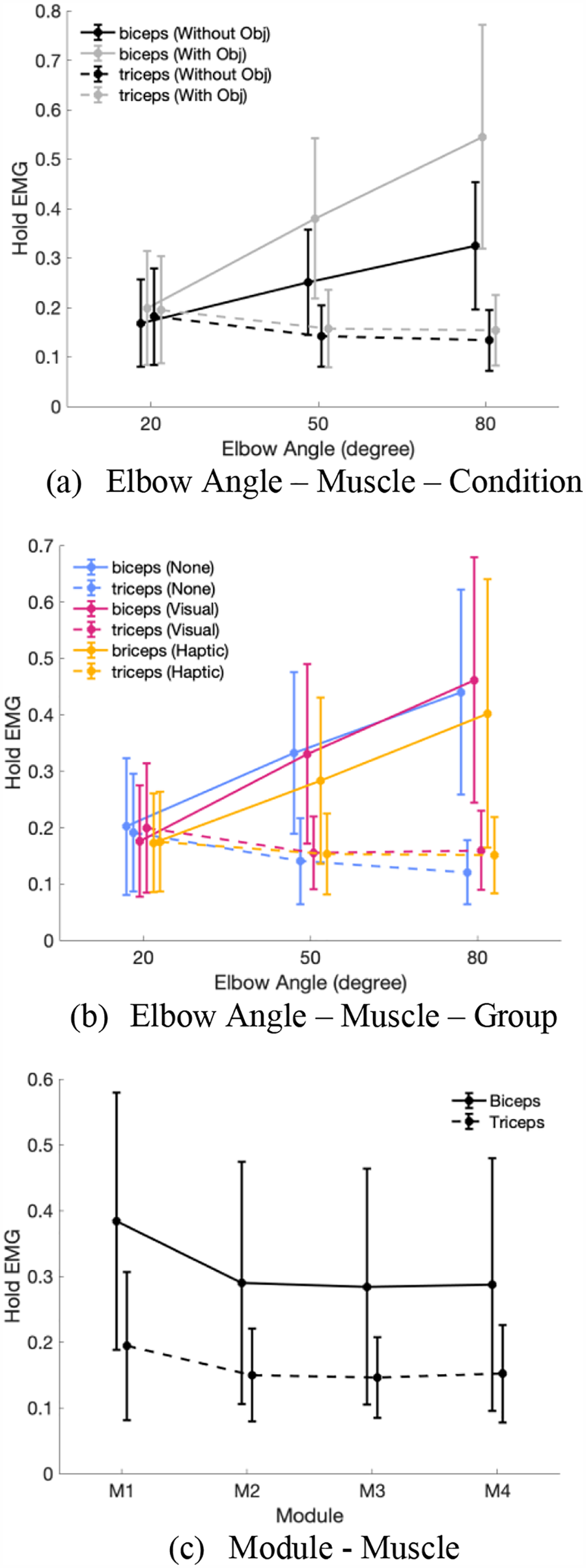
Significant interaction effects observed in hold EMG. (a) Three-way interaction: Elbow Angle – Muscle – Condition; (b) Three-way interaction: Elbow Angle – Muscle – Group; (c) Two-way interaction: Module – Muscle. The ideal usage of exoskeletons should have hold EMG = 0.
Discussion
In this study, we evaluated a task that included moving between targeted postures and holding those postures with and without an object while wearing an exoskeleton. Hold EMG was measured to evaluate how effectively people used the exoskeleton during the hold periods of a target position matching task, and if they could benefit from the biofeedback.
Our hypothesis that biofeedback would lead to a decreased muscle activation during the hold periods was not supported. Participants seemed not to benefit from the biofeedback as no difference in hold EMG was observed across groups. Participants still made considerable muscle efforts despite being aware of their muscle status and the necessity to maintain low muscle activation. The difficulty in reducing muscle activation might be explained by multiple reasons. First, there was a discrepancy between what participants saw and what participants thought. A few participants reported that “I felt like I was relaxing but the feedback told me that I was not.” This discrepancy might lead to distrust, as people could trust their intrinsic feelings more than the feedback. Second, there was also a discrepancy between what participants wanted to do and what participants could do. Some participants said they tried to relax their muscles but failed. This discrepancy indicated that there might be a switch from the biological motor program to exoskeleton motor program, i.e., people normally need to contract the biceps to hold their arms at 80° against gravity, but do not have to do so when they wear the exoskeleton. The increasing hold EMG for biceps as elbow angle increases is the motor program that a user would adopt when holding the biological limb without the exoskeleton, and a steady horizontal line close to 0 as elbow angle increases is what was desired with the exoskeleton but was not observed from participants.
Learning and training are usually needed to develop exoskeleton motor programs (Gordon, 2007; Poggensee, 2021). While we did see a decrease of hold EMG after M1, suggesting that participants had an adaptation process, they remained at a relatively high hold EMG value during M2 – M4, which was far from being ideal (close to 0). It seems that further guidance might be needed to help build the exoskeleton motor program. Participants practiced how to relax at different elbow angles before the task, but still had difficulty relaxing their muscles during the target-matching task, indicating that additional movement tasks through a longer training period might be necessary. For example, they might need to practice reaching and holding as well, as this requires both engagement and disengagement of muscles. Longer practice time could also be helpful, since only 5 seconds were given in the experiment during the hold periods and participants might not have the skill to relax their muscles at flexed elbow angles in this time frame.
The importance of learning the exoskeleton motor program extends beyond the muscle effort reduction. When exoskeletons are not utilized properly, they may fail to accurately predict users’ intentions. For example, if the user activates their biceps significantly, the exoskeleton would interpret this activation as an intention to flex the arm, even if the user simply wants to hold a heavy object. This misinterpretation of the user’s intentions can lead to inconsistencies in the user-exoskeleton team performance, ultimately impacting the effectiveness of the human-exoskeleton system. Further research on controller development is also needed to enable both experts and novices to effectively use the exoskeleton.
One limitation of this study was the lack of customization in the fitting of the Myomo exoskeleton prototype for each participant. Although we adjusted the software parameters based on individual preferences, we were unable to provide a personalized fit, as Myomo’s approach involves molding customers’ arms for optimal customization. It is possible that participants could have achieved better performance with a more tailored fitting. In future studies, it would be valuable to explore expanding training methods that enable users to acquire the exoskeleton motor program, as well as control development to improve exoskeleton operation.
Conclusion
This paper evaluates the effects of EMG biofeedback on muscle effort reduction when holding a position during a tracking task with an EMG-based powered upper limb exoskeleton. The findings reveal that visual and haptic EMG biofeedback did not lead to muscle effort reduction when holding a position, which may be attributable to not acquiring an appropriate exoskeleton motor program and not being able to utilize the biofeedback information. Additional movement tasks and updates in the controller are necessary to support developing a new motor program during a motion requiring transitions and hold periods.