
Abstract
Trust and attention allocation are pivotal determinants in human-automation interaction. However, there are scarce empirical findings regarding the relationship between trust and attention allocation. Observations from our previous work suggested there may be a negative correlation between trust in automation and eye movement towards automation, though no formal analysis of these data had been conducted to quantify this relationship. The present meta-analysis examined the relationship between three dimensions of trust in automation (performance, process, and purpose) and visual attention allocation to the automation. Specifically, we applied Cumming’s (2014) meta-analysis technique to combine evidence across three experiments. Results indicated a negative correlation between trust in automation and visual sampling of the automated system monitoring task for performance-based trust, but not for process- or purpose-based trust. These findings suggest that operators scanned the automation’s behavior less frequently when indicating higher performance-based trust towards the automation.
Introduction
In many domains, the implementation of automation has shifted the role of the human from an active controller to that of a passive monitor of systems (Bainbridge, 1983; Parasuraman et al., 2018). Indeed, future aviation environments, such as those envisioned under the advanced air mobility (AAM) concept, will leverage increasingly autonomous technologies and higher levels of automation to allow few human operators to simultaneously manage many aerial vehicles (Aubuchon et al., 2022). Such working environments may lead to situations where human operators either misuse unreliable automation or disuse reliable automation (Parasuraman & Riley, 1997). Because human operators possess limited attentional resources to allocate for monitoring, trust may be calibrated inappropriately (Lee & See, 2004) due to a degraded perception of performance of automated systems. In fact, previous empirical work has started quantifying relationships between human-automation trust and attention allocation in a controlled lab setting (Karpinsky et al., 2018; Sato et al., 2020, 2022). However, empirical evidence to support such relationships is relatively sparse (see however Gold et al., 2015; Hergeth et al., 2016). To address this dearth of evidence, the present study applied a meta-analytic approach (Cumming, 2014) to reanalyzing subjective trust and eye movement (proxy measure of visual attentional resource allocation) data across three studies.
Human-Automation Trust
The literature indicates evidence for trust as a critical factor driving human-automation interaction (Chancey et al., 2017; Hoff & Bashir, 2015; Karpinsky et al., 2018; Lee & See, 2004; Muir, 1994; Muir & Moray, 1996; Sato et al., 2020, 2022; Yamani et al., 2020). Human-automation trust can be defined as “an attitude that an agent will help achieve an individual’s goals in a situation characterized by uncertainty and vulnerability” (Lee & See, 2004, p. 51). Theoretical models of human-automation trust originated from interpersonal trust research (e.g., Barber, 1983; Rempel et al., 1985). Muir and Moray (1996) empirically tested the model of human-automation trust proposed by Muir (1994) integrating Barber (1983) and Rempel et al.’s (1985) models. Later, Lee and See (2004) proposed a model of human-automation trust based on the previous models of trust (Barber, 1983; Muir & Moray, 1996; Rempel et al., 1985). One signature of the model of Lee and See (2004) is that informational bases of trust in automation can be characterized by levels of attributional abstraction, which comprise performance, process, and purpose. In this model, human operators are assumed to develop trust towards the automation by accumulating three information sources including the automation’s behavior or what it does (i.e., performance), the automation’s mechanisms or how it works (i.e., process), and the system designer’s intention for developing the automation or why it was developed (i.e., purpose).
Previous work has repeatedly shown that trust in the three bases of trust responds differently to experimental manipulations such as task load (Karpinsky et al., 2018) and risk (Sato et al., 2020; see, however, no effect of risk on these dimensions in Chancey et al., 2017). For example, Karpinsky and colleagues (2018) examined the effect of task load on human-automation trust in a multitasking flight simulation environment. Participants concurrently performed a tracking task and a semi-automated system monitoring task. Task load was manipulated by varying the difficulty of the tracking task. Karpinsky et al. (2018) reported that participants rated lower performance- and process-based trust under the high task load condition than the low task load condition. However, there was no statistical evidence that purpose-based trust differed between task load conditions. These results suggest that participants rated human-automation trust based on the automation’s behavior and its mechanisms, but not the system designer’s intention for developing the automation. Moreover, the effect of task load on human-automation trust was replicated in two recent studies (Sato et al., 2022; Sato & Yamani, 2023). Importantly, the manipulation of task load also influenced attention allocation as measured via eye movements.
Attention Allocation
The general human-information processing (HIP) model assumes that information is processed in a serial series of discrete information-processing stages (i.e., sensory processing, perception and working memory, decision making, and action implementation) and that limited attentional resources must be allocated to activate each information-processing stage (Kahneman, 1973; Wickens et al., 2015; Yamani & Horrey, 2018). Different tasks required by a multitasking environment compete for the operator’s limited attentional resources. Theoretically, task performance is determined by the tradeoff between the task demand and the amount of attentional resources supplied to the task. Specifically, human operators perform the task successfully when the attentional resources supplied exceed task demand. Conversely, human operators perform the task poorly when task demand exceeds the attentional resources supplied.
Modern work environments often involve automation to support or even replace human functions to alleviate operator workload. Ironically, however, the involvement of automation to multitasking environments can bring more complexity, because operators may under- or over-allocate their limited attentional resources depending on their relationship with the automation (Lee & Seppelt, 2012). As a step forward, Yamani and Horrey (2018) proposed a conceptual model that describes human operators’ attention allocation strategy when interacting with automation that varies its supportive function across different human information-processing stages (i.e., sensory processing, working memory and perception, decision making, response selection). In their model, allocation of attentional resources is determined by the context of the automation (i.e., levels of automation in each HIP stage) and the properties of the automation (e.g., reliability). To illustrate, if the primary task is augmented with automation, then attentional resources can be strategically “freed” to apply to a secondary task. One obvious limitation of their model is that it lacks trust as a factor that drives attentional resource allocation in multitasking workspaces involving automation.
Anecdotally, in our previous work, generally, we have observed a negative correlation between trust in automation and eye movements towards a visual area representing the automation. Yet no formal analysis has been conducted to quantify and examine the negative correlation.
Current Study
We anecdotally observed in our data set that participants showed more eye movements to areas of interest that represent behaviors of automation when participants rated lower trust towards the automation. In fact, there are only a few empirical works that directly examined the relationship between human-automation trust and attention allocation (Gold et al., 2015; Hergeth et al., 2016). The current study applied a meta-analytic approach as proposed by Cumming (2014) to combine evidence across three experiments (Sato et al., 2020, 2022; Sato & Yamani, 2023) to examine the relationship between trust in automation and attention allocation separately for the three levels of attributional abstraction of trust. We hypothesized that there would be a negative correlation between human-automation trust and attention allocation for performance- and process-based trust, but not for purpose-based trust, following previous findings (Sato et al., 2022, Sato & Yamani, 2023).
Method
Experimental Studies
The current study analyzed data from three experimental studies (Sato et al., 2020, 2022; Sato & Yamani, 2023) comprising 111 undergraduate students (80 females and 31 males; Mage = 20.87, SDage = 5.25) from a large public university. All three studies administered Chancey et al.’s (2017) trust questionnaire to examine the three bases of human-automation trust proposed by Lee and See (2004) (i.e., performance, process, and purpose). Also, these studies measured percentage dwell time (PDT) on the system monitoring task in the Multi-Attribute Task Battery-II (MATB-II; Santiago-Espada et al., 2011), which we interpret as participants’ visual attention allocation towards automation. Yet, it should be noted, we acknowledge eye movement and attention are not perfectly correlated (See Wickens & McCarley, 2008, p. 42). The following sections provide a summary of each experiment.
Sato et al. (2020)
This study examined whether perceived risk modulated the effect of task load on human-automation trust and attention allocation. Participants concurrently performed the system monitoring task and the tracking task within the MATB-II. The system monitoring task was supported by a 70% reliable automated signaling system. Following Karpinsky et al.’s (2018) methodology, task load was manipulated by varying the difficulty of the tracking task. Following Chancey et al.’s (2017) methodology, Risk was manipulated by employing one of two instructions. Specifically, participants in the high-risk group were instructed that they will repeat the experiment for poor performance whereas participants in the low-risk group did not receive such instructions. Results indicated that performance-based trust elevated when participants perceived high risk under high task load condition. Data suggested no differences in PDT between the tracking and systems monitoring tasks; however, the data showed that participants were more likely to return from the system monitoring task to the tracking task more frequently under high task load condition.
Sato et al. (2022)
This study employed the MATB-II to examine whether task priority influenced the effect of task load on human-automation trust and attention allocation. Participants concurrently performed the system monitoring task, tracking task, and fuel management task. A 70% reliable automated signaling aid was implemented in the system monitoring task. Participants in the tracking priority group were asked to prioritize the tracking task over all tasks whereas participants in the equal priority group equally prioritized all tasks. Following Karpinsky et al. (2018) and Sato et al. (2020), the difficulty of the tracking task varied across different blocks. The experiment replicated previous findings on the effect of task load on human-automation trust and visual attention allocation (Karpinsky et al., 2018). Additionally, participants rated lower performance-based trust when delegating equal priority to all tasks under high task load condition.
Sato and Yamani (2023)
This study examined the effect of interruption frequency on human-automation trust and attention allocation. Participants concurrently performed the system monitoring task, tracking task, and communication task within the MATB-II. The system monitoring task included a 70% reliable automated signaling aid. Also, the difficulty of the tracking task varied across blocks. While participants performed the tasks, they received either 4 auditory messages (low interruption frequency) or 16 auditory messages (high interruption frequency) from the communication task. Results indicated that participants rated lower performance- and process-based trust under the high task load condition, replicating previous works (Karpinsky et al., 2018; Sato et al., 2022).
Meta-Analysis
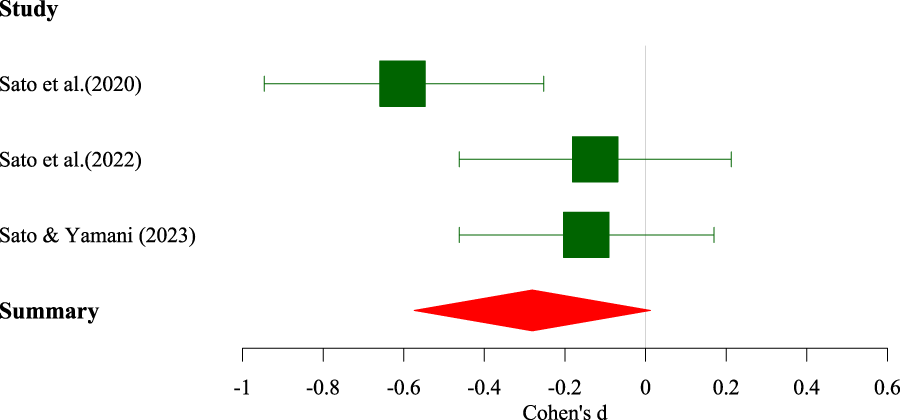
The current study applied Cumming’s (2014) meta-analytic approach to examine the relationship between each human-automation trust dimension (performance-based trust, process-based trust, and purpose-based trust) and PDT on the system monitoring task. Specifically, our interpretation primarily focused on the confidence interval of effect size as it quantifies the extent of uncertainty. The Exploratory Software for Confidence Intervals (ESCI) module (Cumming & Calin-Jageman, 2017) was used to estimate the confidence interval of effect size. The results are represented as a forest plot where the x-axis depicts the effect size (see Figures 1–3). The green horizontal line represents 95% confidence interval of the effect size for the individual study. The red diamond represents the weighted meta-analytic means and 95% confidence interval of the effect size when all the studies are combined.
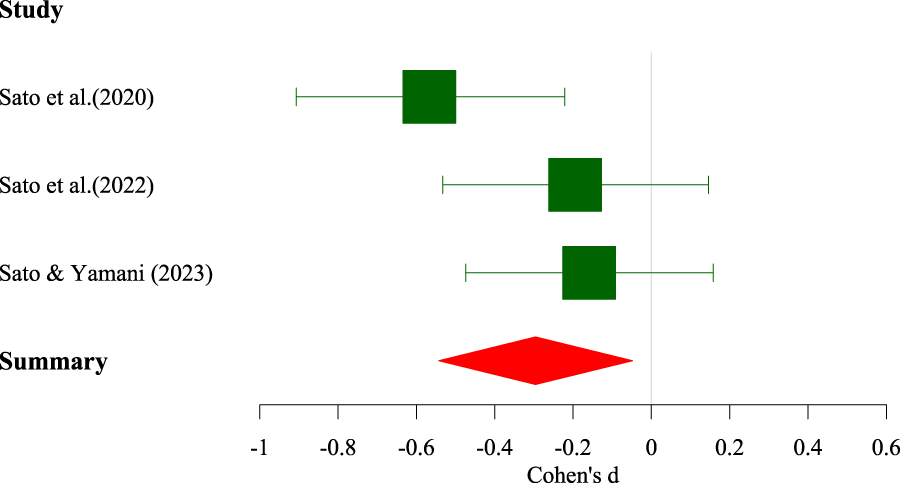
A forest plot depicting the relationship between performance-based trust and PDT on the system monitoring task. Note: Error bars represent 95% confidence intervals.

A forest plot depicting the relationship between process-based trust and PDT on the system monitoring task. Note: Error bars represent 95% confidence intervals.
A forest plot depicting the relationship between purpose-based trust and PDT on the system monitoring task. Note: Error bars represent 95% confidence intervals.
Dependent Variables
Human-Automation Trust
Chancey et al.’s (2017) modified trust questionnaire was used to assess the three dimensions of human-automation trust. Each item was rated on a 12-point Likert scale ranging from not descriptive (1) to very descriptive (12). These items were subdivided into three dimensions of trust including performance-based trust (minimum score = 5, maximum score = 60), process-based trust (minimum score = 5, maximum score = 60), and purpose-based trust (minimum score = 3, maximum score = 36).
Attention Allocation
Participants’ attention allocation to the automation was examined by computing the PDT on the system monitoring task. PDT is defined as the proportion of time in which participants gazed on a certain region of interest.
Pearson Correlation
Pearson correlation coefficient was calculated for each study, and the coefficient was transformed to Cohen’s d using the following formula:

where r denotes Pearson’s correlation coefficient and d represents Cohen’s d (Ruscio, 2008).
Results
The results showed a significantly negative correlation between performance-based trust and PDT on the system monitoring task, t(110) = -2.34, p = .019, d = -0.30, 95% CI = [-.54, -.05], indicating that performance-based trust increased when participants spent less time fixating the system monitoring task. However, there was no significant correlation between human-automation trust and visual attention allocation for process-based trust, t(110) = -1.19, p = .234, d = -0.28, 95% CI = [-.71, .18], nor purpose-based trust, t(110) = -1.88, p = .06, d = -0.28, 95% CI = [-.57, .01]. Figures 1–3 present a forest plot that represents the relationship between each dimension of human-automation trust and attention allocation on the system monitoring task.
Discussion
Characterizing the relationships between trust in automation and visual attentional resource allocation toward monitoring of the automation is pertinent to developing a theoretical model of human-automation interaction in professional domains that rely heavily on automation. To this end, the present study used a meta-analytic technique (Cumming, 2014) to combine data across three studies conducted in our lab using similar experimental setups and examined how the three bases of trust relate to visual attention allocation in a multitasking environment involving imperfect automation.
First, the results evinced a negative correlation between performance-based trust in the automation supporting a system monitoring task and resource allocation to that automation. This implies that operators check behaviors of the automation less frequently when they have higher performance-based trust in the automation. The negative correlation at the performance level of attributional abstraction partly suggests that operators base their trust on performance of automation by allocating attention to perceive and interpret behaviors of the automation. This behavior is likely to arise because the current participants interacted with the system for the first time without any instruction regarding how the automation works or why it was developed. This interpretation of the current data relates to dynamic learned trust in the framework proposed by Hoff and Bashir (2015). In a course of interaction with automation, an operator’s trust presumably fluctuates when automation performs variably. This forms the operator’s dependence strategy based on system performance as feedback, and this iterates during their interaction. The current evidence from the meta-analysis partly reflects characteristics of performance-based trust and attention allocation.
Alternatively, the negative association did not arise at the remaining two levels – process and purpose. In both levels of attributional abstraction, operators need to extrapolate from their immediate perception of behaviors of the automation to either algorithmic mechanisms (i.e., process) or intent of the automation designer (i.e., purpose). In the studies incorporated to the current meta-analysis, participants were not familiar with the MATB-II environment and the automation used, and participants interacted with the system for 40 minutes at most. Although the participants had some time to develop their trust in automation throughout the duration of the experiment (i.e., dynamic learned trust), they were not given any instruction regarding its process or purpose. Nevertheless, the direction of both correlations was the same as the one for performance-based trust, suggesting that participants’ trust might have started evolving in the remaining levels that require further abstraction from the perceived behavior of the automation.
As a limitation, though, the data on the purpose-based trust were ambiguous as the 95% meta-analytic confidence interval did not contain zero but the p-value was greater than the standard cutoff (i.e., p < .05). One potential alternative approach is to use Bayesian meta-analysis which allows combining multiple Bayes factors, a measure of default Bayesian analysis, across different studies and calculating the meta-analytic Bayes factor (Rouder & Morey, 2011). This approach may help reveal underlying relationships between trust in automation and resource allocation to the automation.
The present study offers more direct evidence on the often-assumed relationships between trust and attention during human-automation interaction. Additionally, this study provides theoretical insights into the role of trust in the attention policy that determines allocation of limited attentional resources to multiple tasks and objects to monitor.
Practical Takeaway
This study examined the relationship between three bases of trust in automation (performance, process, and purpose) and attentional resource allocation by applying Cumming’s (2014) meta-analysis technique to integrate evidence from three experiments.
Results indicated a negative correlation between performance-based trust and attentional resource allocation to the automation whereby performance-based trust elevated when participants fixated the automation less frequently.
Findings may help development of a gaze-based measure of trust in automated technology in different domains including air and surface transportation.
Footnotes
Acknowledgements
This research was supported by a Cooperative Agreement (NIA.COOP.05.202075 – 202075) to Old Dominion University (PI Yamani) from NASA Langley Research Center. The views expressed are those of the authors and do not necessarily reflect the official policy or position of NASA or the U.S. Government.