
Abstract
Muscles, with broad contraction response bandwidth from milliseconds to seconds, are symmetrically distributed on both sides of the fish’s body. By employing these symmetrical muscles with different contraction response combinations, fish are capable of multimodal locomotion including crawling, jumping, rolling, escaping, and swimming. These locomotion modes, ranging from water to land, enable fish with simple body structure to have strong survival abilities. This work proposes a teleost-inspired multimodal locomotion soft robot, named TMSR, which is capable of multimodal locomotion in both underwater and terrestrial environments. The TMSR features a fish-like simple structure with two shape memory alloy (SMA) artificial muscles, each with different contraction response bandwidths, asymmetrically arranged along its central plane. A series of contraction response combinations using these two SMA artificial muscles were developed for the multimodal locomotion of TMSR. Through performance experiments and mechanical models, the driving characteristics of the SMA artificial muscles and the key factors influencing their contraction responses were explored. The TMSR exhibits excellent adaptability and adjustability across various terrains, achieving five different modes of locomotion similar to the movement behaviors of fish through a lightweight and simple biomimetic structural design, including the unique escape movement, which is uncommon in current soft locomotion robots. This design endows the TMSR with a lower mass–mode ratio and higher flexibility and multifunctionality compared with similar robots. This research contributes to broadening the application prospects of such robots in diverse environments.
Introduction
Teleost fish inhabit almost all aquatic environments, and they can also be found on land. 1 Their body structures are relatively simple, featuring powerful muscles on both sides, with the head and tail being significant components. These muscles provide high-bandwidth, with contraction response times ranging from a few milliseconds to several seconds. 2 The gills in the head, along with the caudal fin and scales at the tail, enable teleost fish to grip surfaces effectively. 3 Relying on the combinations of high-bandwidth muscles and the body coordination of the head and tail, teleost fish can perform complex actions such as crawling, rolling, jumping, escaping, and swimming,4,5 ranging from terrestrial to aquatic environments. The mechanisms in the muscle contraction response and body coordination provide a desirable inspiration in the design and control of small-scale robots with a simple structure but multimodal locomotion capability.6–9
In recent years, various types of bionic fish robots have been developed.10–12 Liu et al. designed a motor-driven variable stiffness fish robot capable of fast swimming in aquatic environments. 13 These robots achieve movements by mimicking the morphology of real fish. Increasingly, research is focusing on muscle-driven mechanisms in fish, employing smart materials such as dielectric elastomers, 14 pneumatic actuators, 15 piezoelectric materials, 16 and others as artificial muscles. 17 However, due to the limitations in the contraction response capabilities of artificial muscles and the lack of consideration for combined muscle driving methods, existing fish robots still have limitations in locomotion patterns and terrain traversal. 18 They can only achieve swimming in aquatic environments and struggle to realize multimodal locomotion across various terrains.
Shape memory alloys (SMAs) have been widely used in the design of soft robots.19–25 Their lightweight and compact structures greatly benefit the integration and miniaturization of soft robots. It has been reported that SMA can achieve driving frequency ranging from below 0.1 Hz 26 to as high as 35 Hz, 27 or even higher.28,29 Such high-bandwidth driving characteristic is highly similar to the contraction response characteristics of muscles.30–33 Aragaki et al. replaced fish red muscles with SMA to create robots capable of high-performance aquatic motion. 34 Zhakypov et al. mimicked ant muscle mechanisms and proposed an insect-scale robot driven by SMA springs (SMAS), capable of performing multimodal ground locomotion such as jumping, walking, and crawling. 35 This demonstrates the versatility and effectiveness of SMAs in replicating biological muscle functions for soft robotic applications.30–33
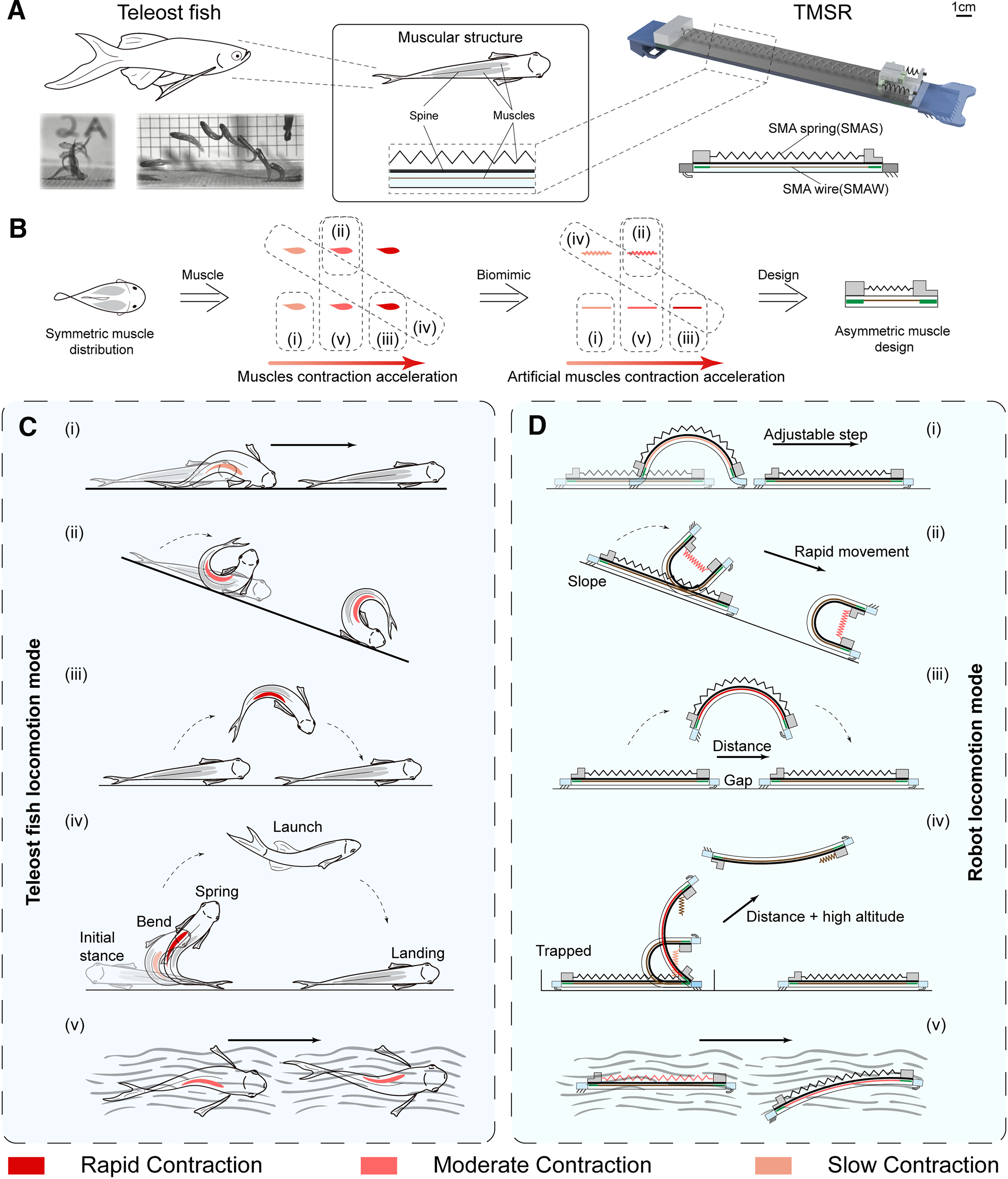
Here, we present a teleost-inspired multimodal locomotion soft robot (TMSR) that features a simple fish-like structure with two differently designed SMA artificial muscles asymmetrically arranged along with a spine-like structure, as shown in Figure 1A. The symmetrical muscles on both sides of the fish can contract at slow, moderate, and rapid speeds, but there is redundancy in certain movements. Therefore, we designed an asymmetrical muscle structure based on the asymmetrical driving mechanism of fish muscle, using SMAS and SMA wires (SMAWs) to create artificial muscles, with the former providing the very large strain, and the latter having a relatively broad contraction response, corresponding to the higher bandwidth muscles of fish. The goal is to simulate fish muscle contraction behaviors at different speeds with a simple and efficient structure (Fig. 1B). Based on the high-bandwidth driving capabilities of the artificial muscles, these muscles are controlled to perform coordinated movements, replicating fish behaviors, as shown in Figure 1C and D.
Biomimetic design and locomotion mechanism of the TMSR.
We characterized the stable and efficient bending capability, responsiveness, and cyclic performance of TMSR through a series of experiments and models and identified the optimal parameters for the actuator module. Based on this, the TMSR exhibits strong terrain-crossing capabilities, enabling it to crawl and roll on inclined surfaces of various angles. Additionally, it can perform rapid distance jumps to traverse steps and gaps. The excellent performance of SMA allows TMSR to swim in aquatic environments. More importantly, the TMSR exhibits escape capabilities, enabling it to autonomously flee its current location when trapped or encountering unexpected situations, which is especially crucial yet difficult to achieve for small robots.36–38 These abilities are attributed to the programmable drive of the asymmetrical muscles. This research broadens the application potential of small bionic robots in complex environments.39–42
Materials and Methods
Asymmetrical muscle design
By studying the movements of various teleost fish (such as zebrafish, mosquitofish) in different environments, the contraction states and movement sequencing of their bilateral muscles across different locomotion modes are observed. Five distinct locomotion modes were identified based on the differences in muscle contraction states during the movement of teleost fish, including crawling, rolling, jumping, escaping, and swimming.
In terrestrial behaviors of teleost fish, they employ different strategies on various terrains by modifying the combined actuation of muscles. Some teleost fish, such as climbing perch, control the speed of muscle contractions to assist in forward crawling (Fig. 1C(i)) or jumping (Fig. 1C(iii)) using their heads and tails. The teleost fish can contract unilateral muscles to flap their tails on slopes, thereby enabling rapid downhill rolling (Fig. 1C(ii)). In addition to conventional terrestrial locomotion modes, the teleost fish also possess a unique escape capability (Fig. 1C(iv)). When encountering stranding, they can produce a type of ballistic jump termed a tail-flip, utilizing asymmetrical contractions of bilateral muscles. Initially, the fish contracts one-sided muscle slowly, and the tail end is fixed. The fish head will peel away from the substrate, and the body is bent into a C-shape, thus storing elastic energy in the spine. Subsequently, the other side muscle contracts rapidly, and the spine releases the stored elastic energy, propelling the fish off the substrate to achieve a significant leap. The teleost fish can rapidly generate substantial body displacement through this mechanism, allowing them to escape from their current predicament. In aquatic environments, teleost fish periodically contract their bilateral muscles, aiding in forward swimming with the assistance of the caudal fin (Fig. 1C(v)). According to the above analyses, slow, moderate, and fast contractions by one side of the fish correspond to crawling, rolling, and jumping movements, respectively. The combination of slow contraction on the one side and fast contraction on the other side corresponds to escape, while the combination of alternating moderate contractions on both sides corresponds to swimming. In summary, there is no combination requiring rapid muscle contraction on both sides.
According to the above rule on muscle combinations, an asymmetrical muscle design method was proposed, in which two SMA artificial muscles possess different contraction response bandwidths. As shown in Figure 1B, SMAS can achieve slow and moderate contraction responses, while SMAW is used for slow, moderate, and fast contractions. The TMSR can perform fish-like movements through the combination of contractions of two artificial muscles: slow contraction of SMAW for crawling, fast contraction of SMAW for jumping, moderate contraction of SMAS for rolling, slow contraction of SMAS combined with fast contraction of SMAW for escaping, and moderate contraction of both SMAW and SMAS for swimming. The asymmetrical muscle design not only endows TMSR with the capability to mimic the full range of muscle contraction responses of teleost fish but also achieves a greater bending angle and output force.
Bioinspired structure design
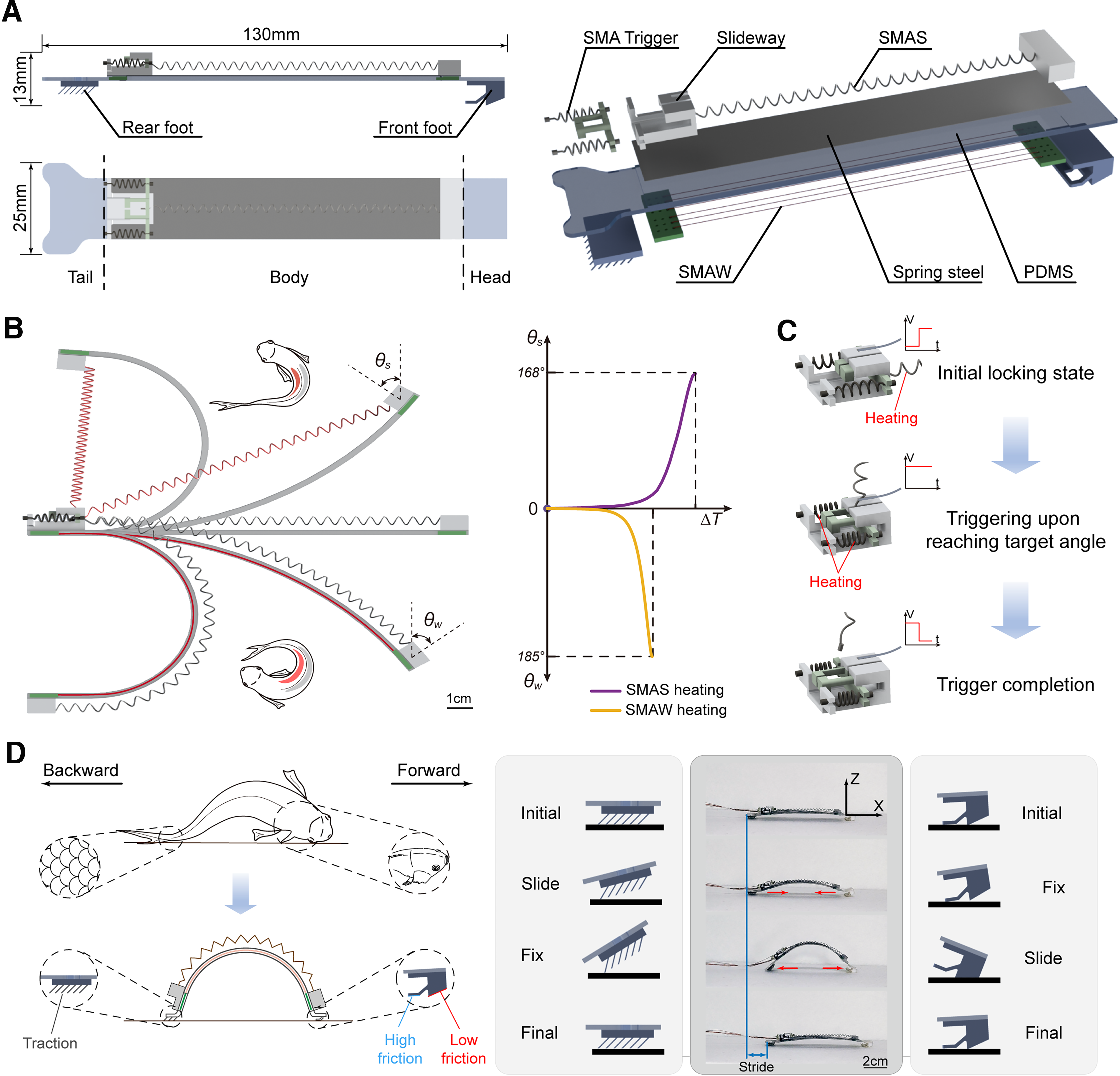
Inspired by teleost fish, the structure of the TMSR is designed. The robot comprises a body capable of bidirectional controllable bending and two feet, and can adapt to various terrains and environments. The dimensions of the robot are 130 × 25 × 13 mm (length × width × height) (Fig. 2A).
Structural design and functionality implementation of the TMSR.
As shown in Figure 2B, the body serves as the actuator module of the robot. The SMA is utilized as artificial muscles to control body bending, and the spring steel is employed as the spine to support the body structure. The spring steel possesses the capability of elastic storage, like the spine of teleost fish. SMAW serves as one-sided muscle. SMAW is fixed on printed circuit boards and casts with polydimethylsiloxane (PDMS), converting its small strain into a large bending deformation of the robot. The rapid recovery of the robot is achievable with the assistance of the spring steel adhered to PDMS. SMAS serves as the other-sided muscle, one end of which is fixed onto spring steel via PDMS. The other end is free and connected to a metal slideway, which can be detached by using an SMA trigger. SMAS is exposed to air to ensure free movement due to its large contraction deformation. Their ability to produce high strain without PDMS embedding enables significant TMSR bending, making them ideal for fast-release behaviors. We conducted material property tests for both SMAS and SMAW, allowing us to better understand the differences between these two SMA artificial muscles. The relevant test results can be found in the Supplementary Data. The residual force of SMAS is much smaller than the actuation force of SMAW. Therefore, the bending of the robot body caused by the contraction of SMAS can also rapidly recover with the assistance of SMAW and spring steel. Once the robot receives different locomotion commands, the control system will generate corresponding pulse width modulation (PWM) signals to actuate the combination of SMA muscles. The SMA muscles can be heated at different currents and times to allow the body to exhibit varying bending degrees, similar to the behavior of teleost fish.
The trigger mechanism, as a part of the robot body, consists of a trigger and a slideway. The trigger is activated by two shorter SMAS to release the free end of SMAS. During the heating and movement process of SMAS, its conductive nature causes the connected metal components to exhibit variable electric potential. By detecting these potential changes through electrodes, the current state of TMSR can be monitored and fed back. During different state transitions, wires can be used to capture the potential signal changes of the metal slideway, thereby assisting in motion control (Fig. 2C).
Inspired by the structure of the gills and tail fins of teleost fish, the front and rear feet of the robot are designed and positioned on the bottom side of the body (Fig. 2D). The rear foot, mimicking the scales on the tail fin through capillaries, can significantly enhance its traction. After the periodic muscle contraction on both sides, asymmetrical friction is generated to enable TMSR to achieve rapid and adjustable locomotion. After a cycle of bending and recovery of the artificial muscles, the TMSR can move a distance in a certain direction, which is defined as the stride length of the movement. Additionally, the TMSR can effectively swim in the aquatic environment due to its wide tail fin, facilitating the capability of amphibious locomotion. The detailed fabrication process of the robot and the contribution of the feet to directional movement are provided in the Supplementary Data.
Result
Model
The realization of biomimetic locomotion in TMSR relies on the distinct properties of SMAS and SMAW. These two artificial muscles exhibit different actuation and recovery behaviors, allowing TMSR to respond more effectively to control signals with varying bandwidths, thereby achieving multimodal locomotion. The difference between SMAW and SMAS is primarily reflected in their force and displacement characteristics—SMAW generates greater actuation and resistive force, while SMAS can achieve a deformation exceeding eight times its initial length. To further investigate the material property variations in different configurations, a series of experiments were conducted, with key experimental results provided in the Supplementary Data.
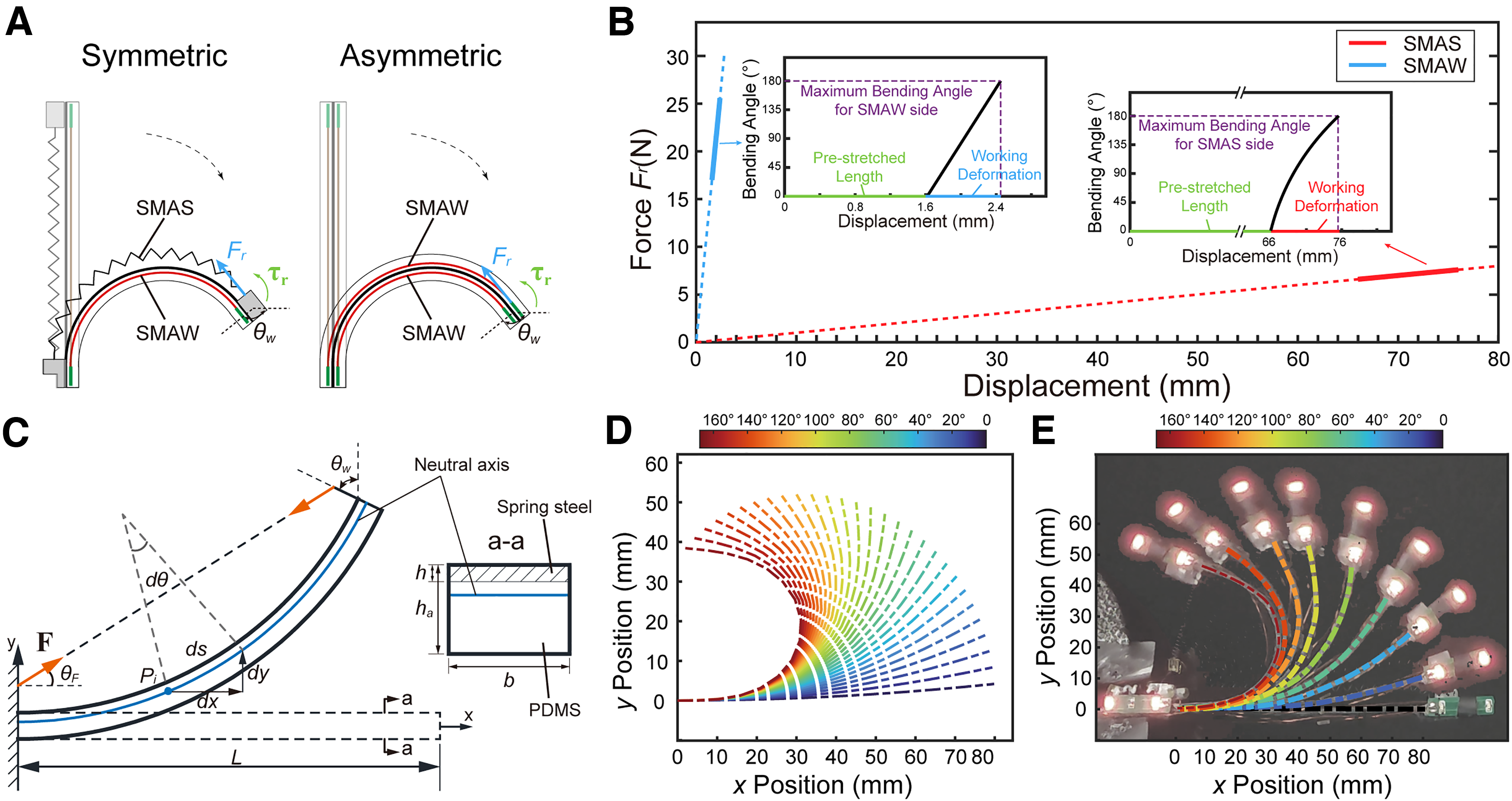
The contraction of bilateral SMA actuators induces the bidirectional bending behavior of TMSR, which can be achieved through two structural configurations: a symmetrical configuration, where both sides are actuated by SMAW, and an asymmetrical configuration, where one side is actuated by SMAW and the other side by SMAS, as illustrated in Figure 3A. Based on the experimental results, we conducted model calculations and analyses to compare the tensile forces generated by SMAW and SMAS on the opposite side when actuating SMAW on the one side, as shown in Figure 3B. We simplified the computational process of the model, resulting in a linear relationship between force and deformation. The specific simplification process and calculation methods can be found in the SMA Actuator Model section of the Supplementary Data. The results indicate that during the bending process, the resistance generated by SMAW is significantly greater than that of SMAS. Moreover, to achieve the same deformation, the tensile force required by SMAW is approximately 10 times that of SMAS. This asymmetrical structural design effectively enhances the actuation performance of TMSR. Based on this asymmetrical structural design and the SMA material model, the structural parameters of TMSR have been optimized, with the design principles of key parameters detailed in the Supplementary Data. The asymmetrical structure enables TMSR to more effectively realize all five motion modes and better replicate the asymmetrical actuation patterns observed in fish. In contrast, the symmetrical configuration suffers from increased thickness, higher bending resistance, and thermal accumulation, all of which negatively impact locomotion performance. More importantly, it cannot perform the escape motion, as this will cause irreversible structural damage.
Asymmetrical design and theoretical modeling of the actuator module.
The bending of the robot is achieved by means of a tension system composed of SMAS and SMAW on both sides and the spring steel. The body can reach the targeted bending angle through active or passive movements of these components. The modeling and motion control for SMAW have been thoroughly analyzed in our previous works. 43 However, SMAS introduces nonconstant curvature deformation in the body, and an in-depth theoretical analysis of this process is necessary to guide experiments. This article focuses more on the shape changes induced by SMAS activation and the impact of different parameters on its performance. We developed a physical model to predict the shape and end angle of the actuator caused by SMAS activation. TMSR’s actuator module is simplified to an elastic beam. Figure 3C illustrates the bending of the elastic beam under the force F exerted by SMAS. Based on this, a physical model is established. The shapes of the actuator module corresponding to different end angles θw can be obtained through theoretical calculations, as shown in Figure 3D. The details of the physical model can be found in the Supplementary Data.
To verify the accuracy of the model, we conducted bending experiments to measure the end bending angles of the actuator module during motion and recorded its corresponding shapes at different bending angles. An image-based angle measurement system was used to measure θw by capturing the positions of LEDs fixed on the actuator module. As shown in Figure 3E, we extracted and displayed the actuator module’s shape at 20-degree intervals based on its end angle variations. The experimental results closely match the model calculations, effectively validating the physical model derived using Newton’s method. Additionally, a simulation was implemented to predict the driving force and displacement of SMAS, as shown in Figure S12. To further refine the model, we measured the phase transition behavior of SMAS under constant temperature and constant force conditions, obtaining the force–displacement–temperature relationship. The results of these measurements, along with a comparison of the model’s performance before and after refinement, can be found in the Supplementary Data.
Characterization of actuator module
The heating time and current are the primary factors that influence the actuator module’s capability. By varying two physical quantities, the comparative experiments were conducted to characterize the drive capability and responsiveness of the robot.
As shown in Figure 4A, one end of the actuator module is fixed in a clamp, and one-sided SMA muscles are activated by a selectable current-heating time sequence to induce a shape change of the actuator module, which reaches the maximum bending angle at varying speeds under different current conditions. Ultimately, the actuator module returns to its flat state via natural cooling and its inherent ability to recover. In this article, the heating time is defined as the total duration of current applied to the SMA, and the cooling time is defined as the time period from the cessation of heating until the rate of change of the bending angle is less than 1 degree per second. Here, SMAS was applied to a current ranging from 0.5 A to 3.5 A, with measurements taken at 0.5 A intervals. A current of 1–4 A is applied to SMAW, also with measurements taken at 0.5 A intervals. Figure 4B shows that the ratio of heating time to cooling time varies as the heating current during the bending process of the actuator module. When the current is low, the heating time required to reach the target bending angle is extended, resulting in increased heat accumulation and a prolonged cooling recovery. However, the heating time experiences a quadratic reduction as the current increases, since the output of electrical energy is proportional to the square of the current. The cooling time is influenced by the actuator module’s structural rigidity and the thermal dissipation of PDMS and decays more slowly, thereby leading to a gradual decrease in the heating/cooling time ratio. Furthermore, when the current is kept constant, and the bending does not exceed the maximum angle, changing the heating time has little effect on the ratio, as indicated by the error bars in the figure.
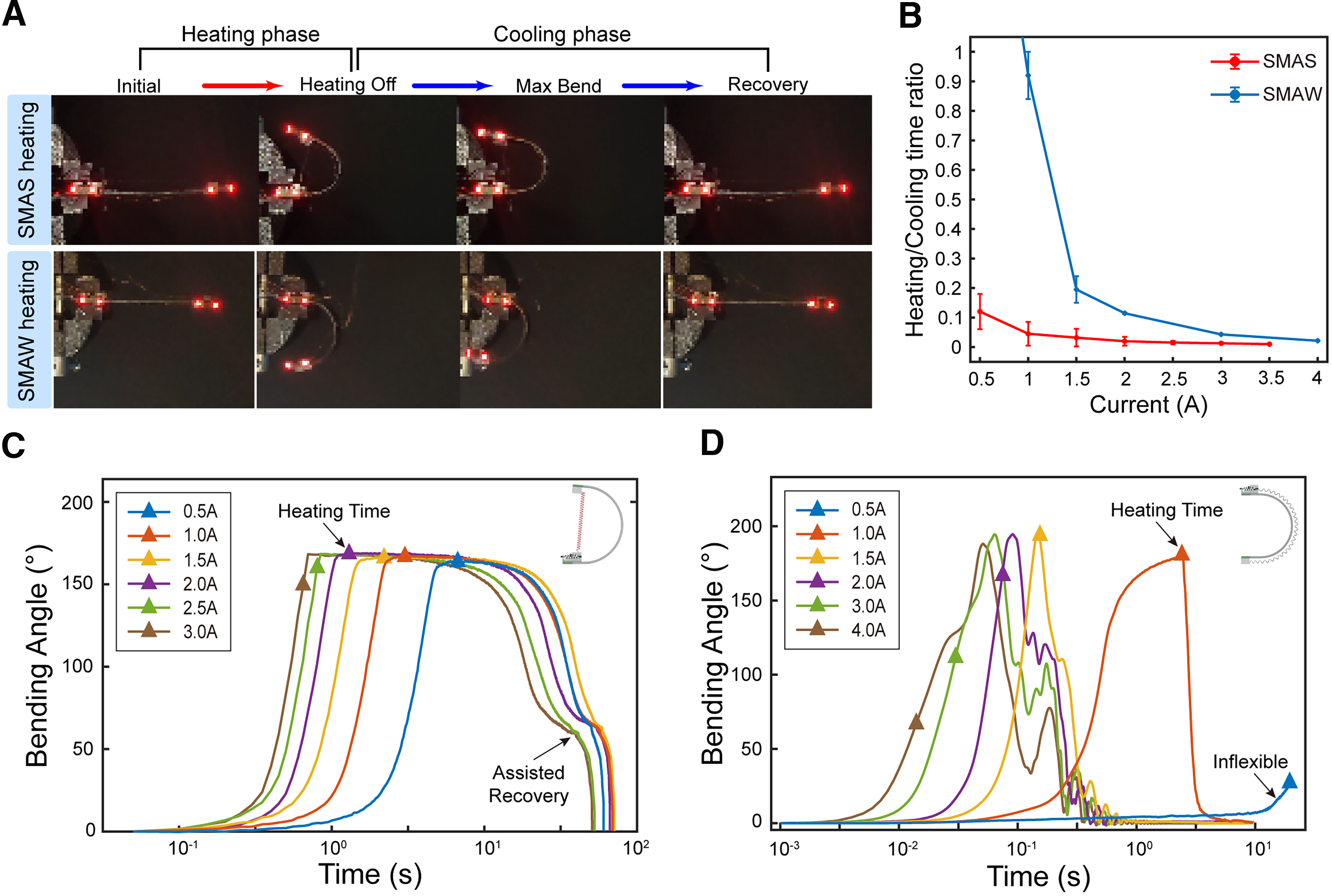
The relationship between heating time and bending angle under different currents is illustrated in Figure 4C and D. The heating time for each current is also indicated in the figures. The heating of SMAS exhibits a pronounced regularity due to the absence of PDMS interference. As previously mentioned, the heating time experiences a rapid decrease with the increase in current under conditions of constant energy, which is clearly observed in experiments. For the SMAS side, the module shows stable bending with heating times correlating to the bending angle up to 2 A, beyond which rapid contraction causes prolonged bending due to inertia. For the SMAW side, stable bending occurs between 0.5 A and 1.5 A, with oscillations observed during recovery due to the spring steel’s elasticity. The bending behavior of the actuator induced by SMAS activation is more regular and controllable, further demonstrating the advantage of the asymmetrical structure over the symmetrical structure in controlling actuator bending behavior. A detailed analysis of the characteristics demonstrated in the experiments is provided in the Supplementary Data.
Demonstration of the multimodal locomotion of TMSR
Crawling induced by slow unilateral muscle activation.
Crawling is a basic function of multimodal locomotion robots. During crawling, both the heating current and time significantly influence the stride length, by changing the energy input during the actuator module’s bending process. Figure 5A shows the robot crawling on a polyester fiberboard. SMAW was first activated for 0.9 s at 0.9 A. In the recovery phase, the rear foot was fixed to the substrate, and the low-friction portion of the front foot contacted the substrate, moving the robot forward. The robot recovered its initial state at 1.87 s. The stride length of TMSR increases with the current, resulting in faster crawling speeds, but traction stability decreases, leading to more frequent slippage. In response to this phenomenon, repeated control experiments were designed to allow the robot to move several times on the same medium, and the frequencies of nonslip were counted. The stability rate of ξ was used to evaluate this performance:

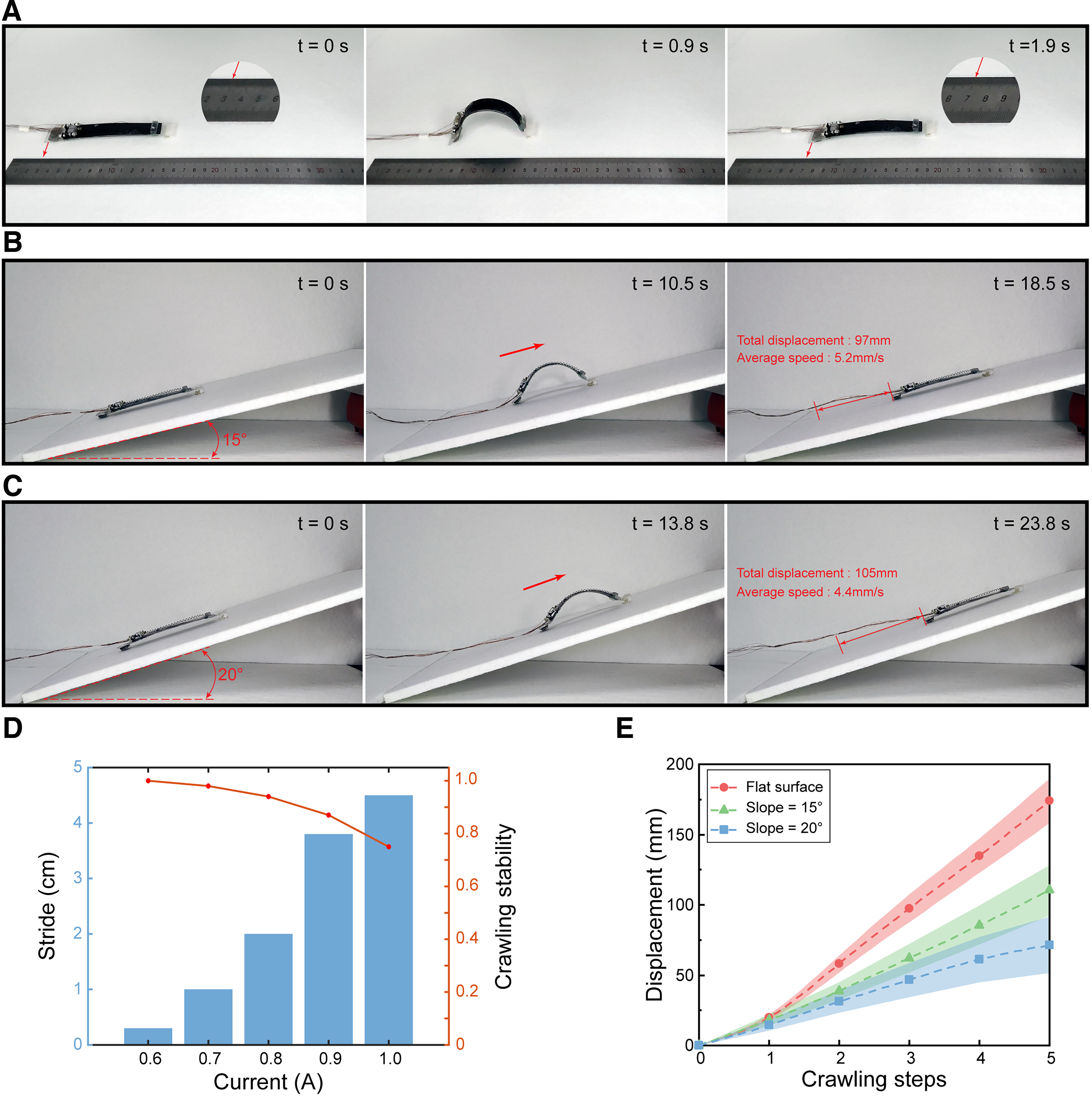
Crawling locomotion of the TMSR on different inclined surfaces.
Additionally, the TMSR was also placed on an inclined surface to verify its climbing ability. As shown in Figure 5B and C, the TMSR successfully climbs the slopes of 15° and 20°. Figure 5E records the movement displacement of TMSR on different slopes, showing its capability of crawling on various inclines. From Figure 5E and Supplementary Movie S1, it can be concluded that the stride length decreases due to slippage as the slope angle increases, with an average stride length of only 14.3 mm at a 20° slope.
Jumping and rolling induced by fast unilateral muscle activation
Jumping is crucial for robots in complex environments. We achieve this through asymmetrical feet design and applying a higher current (typically exceeding 2 A). When a sufficiently large current is applied to SMAW, TMSR can bend rapidly. A higher current allows the robot to reach the target angle faster, generating a greater impulse for jumping. The jumping ability of TMSR without installed feet is measured, which, similar to many teleost fish, could only generate large vertical displacements and minor horizontal displacements. In the absence of feet, TMSR’s bending motion is symmetrical, resulting in equal reaction forces and initial velocities at both the front and rear ends, causing the robot to jump vertically. By designing unique feet structure, we redirected the energy output for forward jumping, enabling TMSR to overcome obstacles. These feet have uneven weight distribution and different ground contact areas, which transform the originally perfectly symmetrical bending behavior of TMSR into an asymmetrical one. Additionally, for each foot, the frictional forces generated during forward and backward relative motion with the ground differ, allowing the TMSR to move forward and perform a jumping motion similar to that of fish. To achieve this jumping behavior successfully, the heating current and heating time for activating the SMAW must be carefully adjusted. Figure 6A shows TMSR swiftly activating SMAW at 3.8 A for 16 ms to jump across a 30-mm gap, reaching a height of 39.5 mm and a horizontal displacement of 184.5 mm (Supplementary Movie S2). Figure 6B shows the continuous jumping motion of TMSR when facing steps with a height of 10 mm (Supplementary Movie S2). The robot adjusts its position and repeatedly activates SMAW when restricted by steps, using a drive input of 3.5 A for 21 ms.
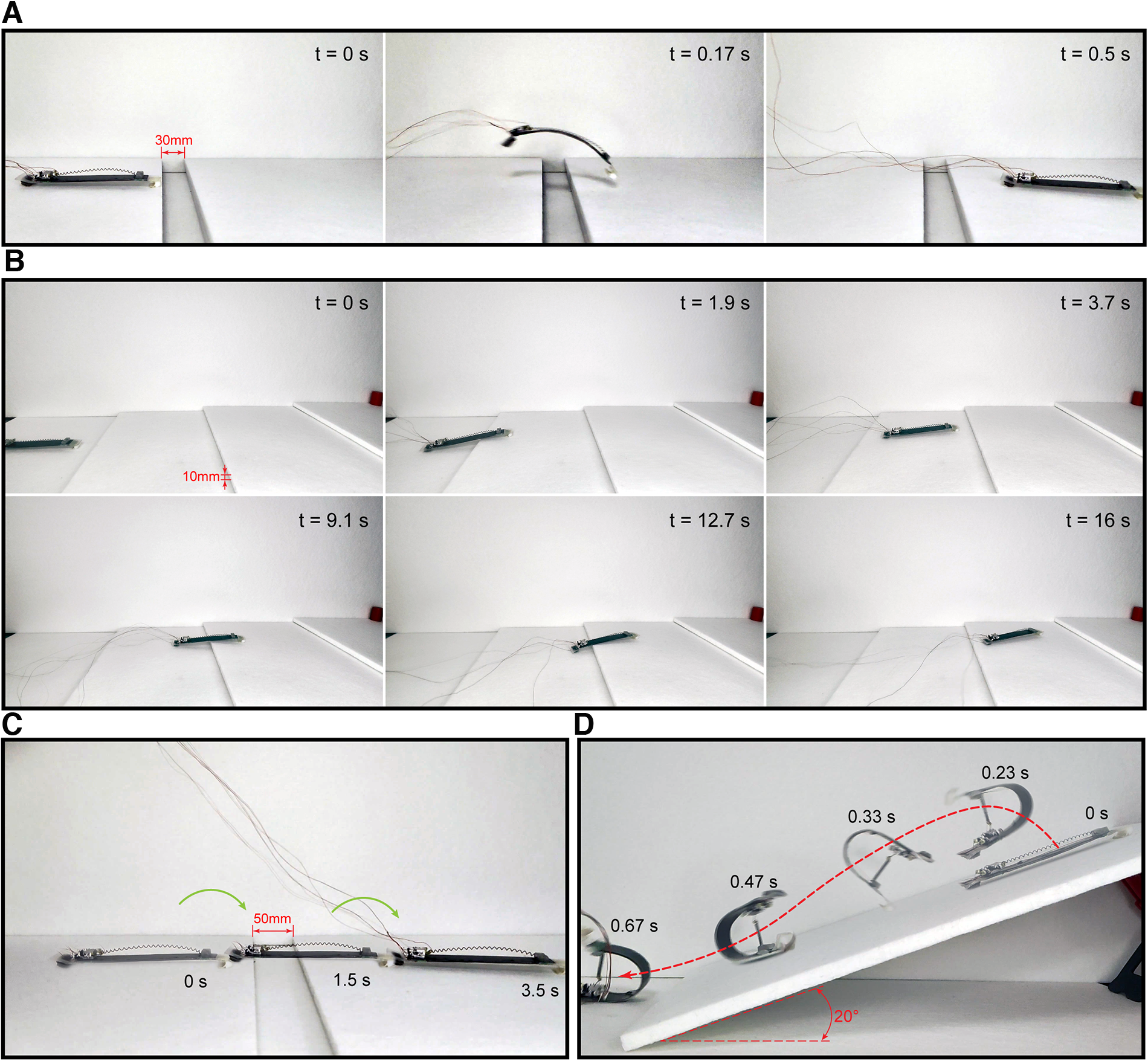
Jumping and rolling locomotion of the TMSR in different terrains.
Figure 6C shows TMSR crossing a 50-mm gap using a step-by-step approach. The first jump crosses the front foot, and the second jump moves the entire robot, with a 3.6 A heating current and 18 ms heating time, achieving a 130-mm forward displacement (Supplementary Movie S2).
When standing on a slope, teleost fish can destabilize their center of mass by bending their bodies and rolling down the slope rapidly. Similarly, when staying on a slope, TMSR can curl into a C-shape by activating unilateral SMAS at 3.5 A for 0.55 s, rolling down at a speed of up to 3.1 BL/s (Fig. 6D, Supplementary Movie S2). After rolling, SMAS cools down, and SMAW assists in recovery.
Escaping and swimming induced by bilateral muscle activation
TMSR possesses a powerful escape capability due to its unique asymmetrical muscles. A trigger mechanism fully releases one end of SMAS, ensuring other muscles and the spine are not constrained, achieving greater locomotion.
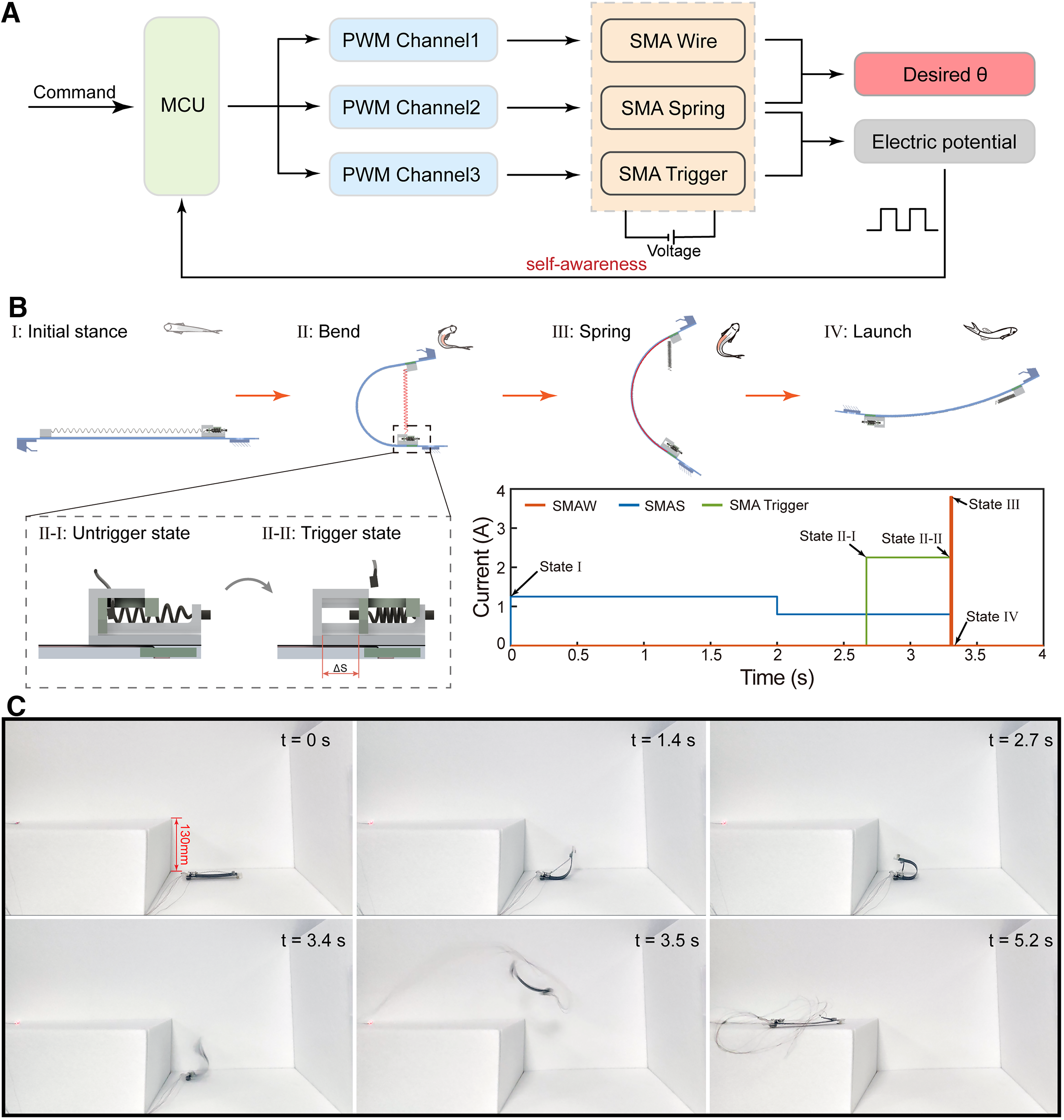
The TMSR utilizes a self-awareness system installed on the triggering mechanism to feed back the current trigger signal, ensuring effective escape locomotion by detecting potential changes in the metal slideway caused by SMAS, and feeding this signal back to the MCU (Fig. 7A). Upon receiving an escape command from the MCU, SMAS is activated to enable the body to bend toward one side and achieve a preset angle. Then, the MCU activates the trigger mechanism and simultaneously stimulates SMAW on the opposite side. The self-awareness system allows SMAW to contract simultaneously at the moment of jump for optimal escape performance. Figure 7B compares the tail-flip jumping process between teleost fish and TMSR and shows the PWM signals applied to the SMA during the motion. However, it can be observed that the escape motion achieved through this method is a one-time behavior. Once TMSR executes the escape command, it loses this capability and can only perform basic crawling and jumping motions. This still differs from the behavior of animals. In our future work, we will further optimize this capability to enable a reset function, allowing TMSR to perform multiple escape motions.
Escape locomotion of the TMSR.
An experimental area mimicking potential predicaments includes a 30-cm high wall and a platform 10 times the robot’s height. When the TMSR is at the bottom of the pit, SMAS is initially activated at a slow speed (1.25 A, 2 s), then reduced to 0.8 A to reach the set angle. After the body posture is prepared, the trigger mechanism is activated (2.25 A, 0.63 s) to release the elastic potential energy stored in the spring steel, and SMAW on the other side is activated (3.8 A, 14 ms) simultaneously for directed escape. This mechanism allows TMSR to achieve a maximum jump height of 295 mm and horizontal displacement of 250 mm, enabling escape from special environments, as shown in Figure 7C (Supplementary Movie S3).
The results show that the TMSR’s locomotion capability is significantly enhanced by learning from teleost fish escape mechanisms. The escape capability is particularly noteworthy in various locomotion modes of TMSR, significantly enhancing the maneuverability and adaptability of the robot. Most existing soft robots lack this escape capability, which allows the robot to extricate itself from adverse terrains and respond to emergencies independently, making it suitable for various complex scenarios.
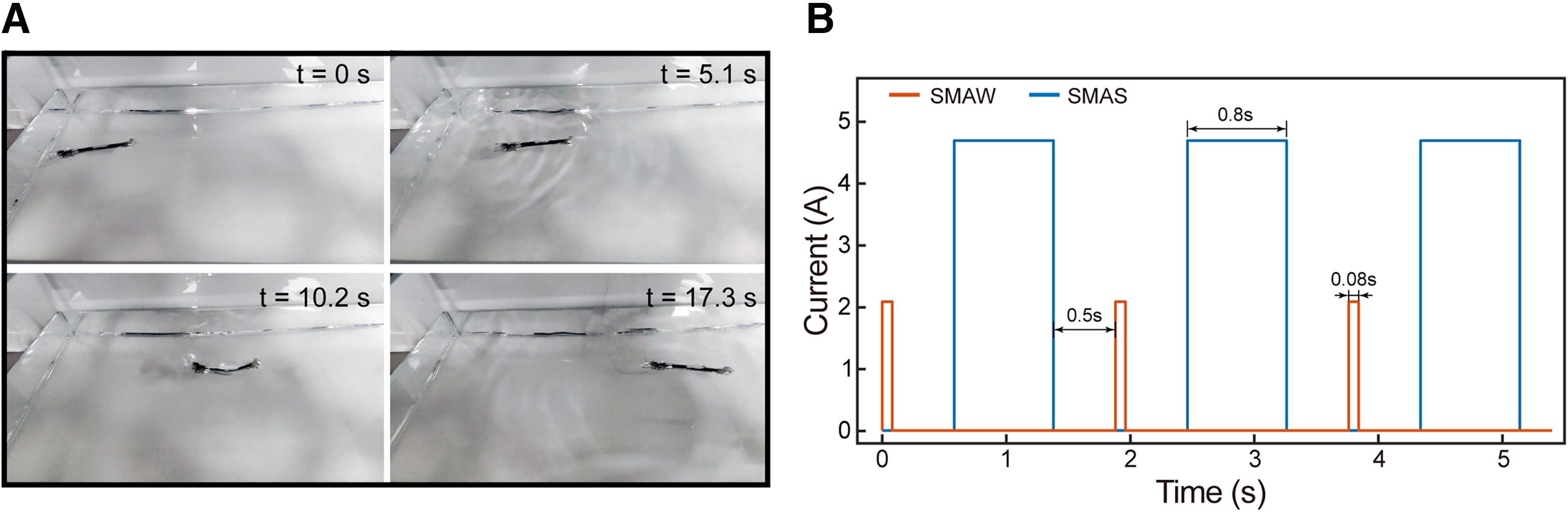
Swimming is a basic locomotion of fish, requiring the body to sway left and right through periodic contraction of bilateral muscles. The bilateral configuration of SMA also enables TMSR to possess such capability, as shown in Figure 8A (Supplementary Movie S3). To ensure smooth and unrestricted motion, the 0.1 mm diameter SMAW are carefully kept slightly slack during assembly to avoid introducing pretension. Water significantly accelerates the heat dissipation of PDMS, necessitating a larger heating current for targeted bending. In this instance, a current input of 2 A was applied to SMAW for 0.08 s. Similarly, due to the exposure of SMAS to water, a large current is also required to achieve heat accumulation. Here, a current input of 4.5 A was applied to SMAS for 0.8 s. TMSR oscillates its body side to side and swims forward by cyclically heating SMAS and SMAW at 0.5-s intervals, as shown in Figure 8B.
Swimming of the TMSR.
Discussion
Thanks to the high-bandwidth muscle characteristics of the SMA-based asymmetrical muscles and the programmable muscle drive combinations, TMSR’s bilateral muscles can respond to different driving frequencies and react quickly, achieving five types of multimodal locomotion, as shown in Figure 9A.
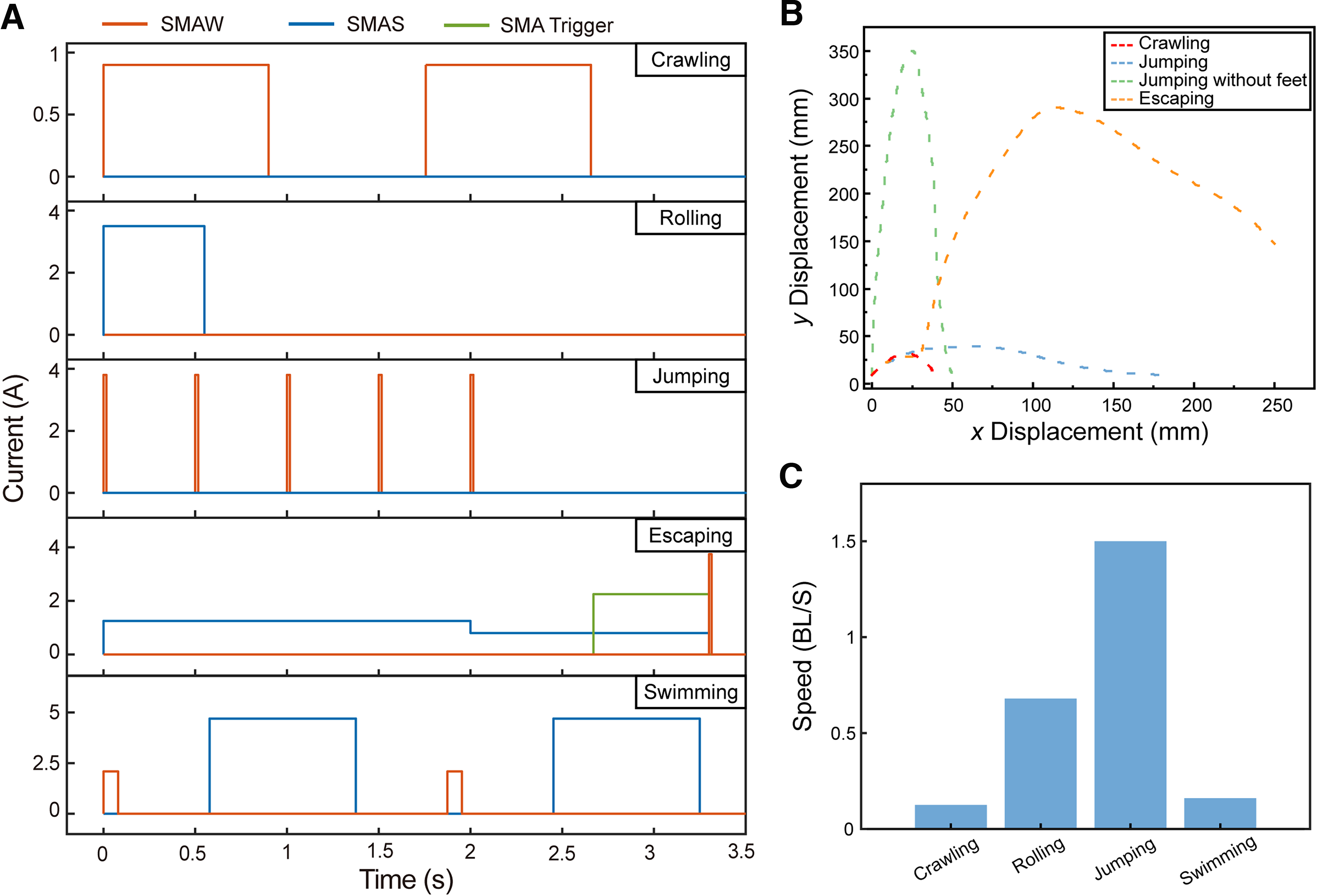
Input signals and performance evaluation of the TMSR in different locomotion modes.
Figure 9B shows the horizontal and vertical displacements generated by the TMSR during multimodal locomotion. Through the design of its front and rear feet, the jumping behavior of TMSR is redirected from nearly vertical leap to horizontal jump, thereby enhancing its obstacle navigation capability. Figure 9C shows the maximum speeds of TMSR in crawling, rolling, jumping, and swimming, which surpass many existing soft robots, particularly those driven by SMA. It can reach speeds up to 1.5 BL/s while jumping. The multimodal locomotion capabilities of TMSR enable it to better adapt to unstructured environments.
We compared TMSR with existing multimodal locomotion robots, using different drive methods, as shown in Table 1. Magnetically actuated robots were not included in the comparison, as they face different challenges in terms of structure, control methods, and applications. Among similar types of multimodal locomotion robots, TMSR can integrate more locomotion modes through a simple and lightweight structure, thanks to the high-bandwidth driving characteristics mimicking the muscles of teleost fish. The design of TMSR not only facilitates manufacturing but also incorporates up to five modes of locomotion to adapt to more complex environments and terrains. We used the mass–mode ratio (MMR), defined as the mass divided by the number of locomotion modes, to measure the relationship between the robot’s mass and its locomotion modes. Although this metric has certain limitations, given the diversity of multimodal robot research and the current lack of a more comprehensive evaluation index, we aim to introduce this parameter to assess the overall performance of robots within a certain scope. The calculation shows that TMSR has the lowest MMR, indicating its advantages in flexibility and multifunctionality. Moreover, TMSR utilizes the orderly contraction of high-bandwidth artificial muscles to perform unique escape actions to extricate itself from difficult situations, a capability that most soft robots lack, thereby enhancing its survivability to a certain extent. Like many multimodal locomotion robots, TMSR can operate both in water and on land, further expanding its range of movement.
Comparison of the Performance Between Teleost-Inspired Multimodal Locomotion Soft Robot and Some Existing Soft Robots
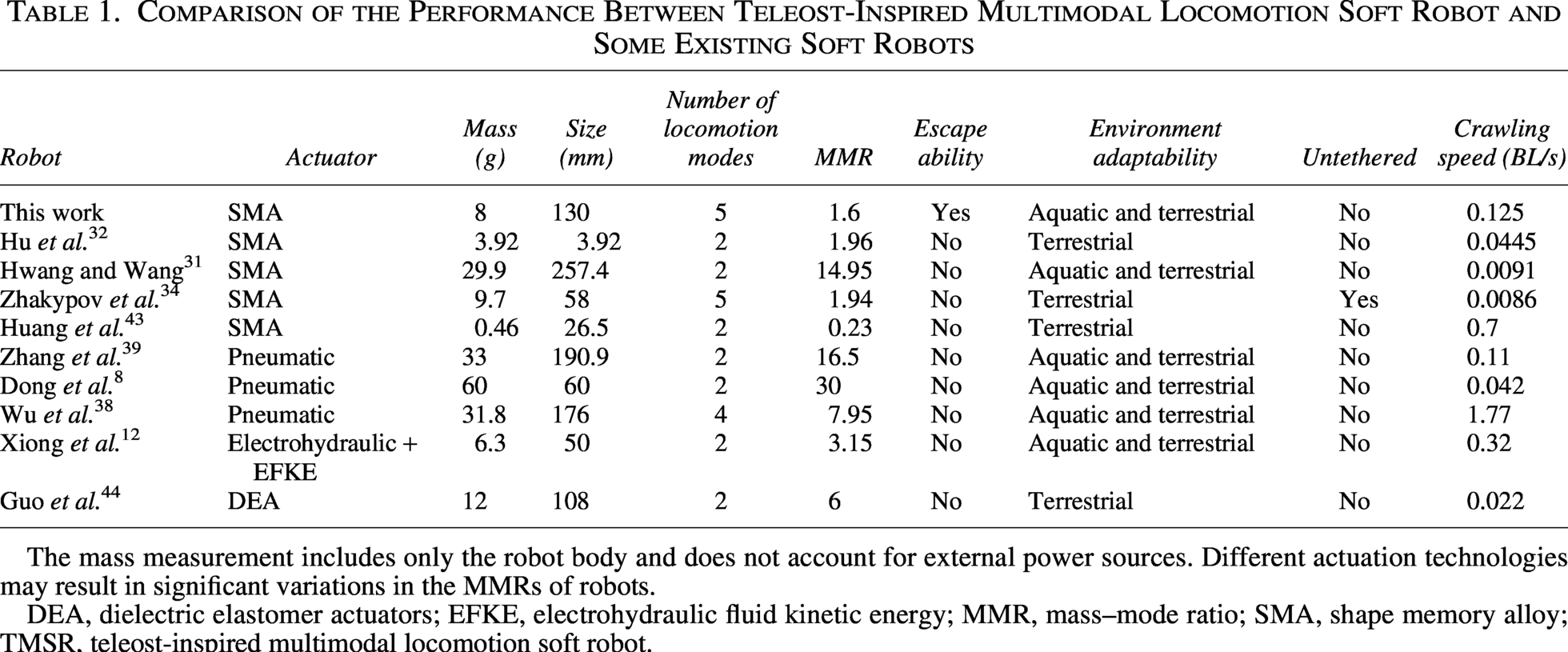
The mass measurement includes only the robot body and does not account for external power sources. Different actuation technologies may result in significant variations in the MMRs of robots.
DEA, dielectric elastomer actuators; EFKE, electrohydraulic fluid kinetic energy; MMR, mass–mode ratio; SMA, shape memory alloy; TMSR, teleost-inspired multimodal locomotion soft robot.
In the future, alternative energy transmission methods, such as optical and magnetic, will be considered to replace traditional electrical actuation. The variations in the foot structure can be considered because the foot affects the locomotive performance of the robot to some extent. In addition, future work may include the following aspects, such as improving the structural design for multiple stable and rapid escape motions, integrating soft sensors and miniature cameras on the robot to detect unknown and confined spaces, and optimizing the foot structure to enable the robot to better switch between locomotion modes across various terrains.
Conclusion
In this work, we proposed a centimeter-scale soft robot inspired by teleost fish, called TMSR. By studying the muscle combination driving methods in different movements of teleost fish, asymmetrical muscles were designed to drive the robot. The artificial muscles based on SMA exhibit muscle contraction response bandwidths similar to those of fish, ranging from a few milliseconds to several seconds. The combination of muscle driving methods and the wide muscle contraction response bandwidth enables TMSR to perform multimodal locomotion, such as crawling, rolling, jumping, escaping, and swimming.
Two asymmetrical feet are designed at the front and rear of the TMSR, enabling it to achieve directional movement and navigate through different terrains. A triggering mechanism senses the state of the artificial muscles in real-time and executes corresponding commands based on the signal changes to control the TMSR’s movements. Modeling and experiments are conducted to explore the effects of heating current and time on the TMSR, identifying the optimal parameters for movements. A series of scenarios are designed to demonstrate the movement capabilities of the TMSR. It can achieve maximum speeds of 0.125 BL/s for crawling, 1.5 BL/s for jumping, and 3.1 BL/s for rolling. Additionally, TMSR can move in water and escape from pits approximately 10 times its body height.
Compared with existing robots, TMSR benefits from the structural design inspired by teleost fish and shows advantages in multimodal locomotion capabilities. TMSR can not only achieve unique escape locomotion but also has the ability to move over unstructured terrains, such as crossing gaps, climbing slopes, and jumping onto steps, which provides a potential approach for further expanding the mobility space of soft locomotion robots. In future work, we will focus on integrating the power and electronic components directly into the robot’s body to achieve fully untethered operation. Additionally, enabling multiple escape motions will be a key priority in our research.
Authors’ Contributions
Z.C.: Conceptualization, methodology, investigation, visualization, writing—original draft, and writing—review and editing. W.G.: Methodology, visualization, and writing—review and editing. J.K.: Methodology, investigation, and writing—review and editing. Q.H. and E.D.: Writing—review and editing. Y.O., L.Z., and M.S.: Methodology and investigation. W.L.: Supervision. H.J.: Conceptualization, visualization, funding acquisition, project administration, supervision, writing—original draft, and writing—review and editing. S.Z.: Conceptualization, funding acquisition, project administration, supervision, and writing—review and editing.
Footnotes
Acknowledgment
The authors appreciate the support and funds.
Author Disclosure Statement
No competing financial interests exist.
Funding Information
This work was supported by the National Natural Science Foundation of China (Nos. 62473353 and U21A20119), in part by the Natural Science Foundation of Anhui Province of China under Grant No. 2508085J027, and in part by the Major Project of Anhui Province’s Science and Technology Innovation Breakthrough Plan with grant No. 202423h08050002.
Supplemental Material
Supplemental Material
Supplemental Material
Supplemental Material
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.