
Abstract
A core soft-robotics challenge for underwater locomotion is reconciling soft actuation’s compliance with the control tractability and robustness of rigid structures. We present SpineWave, a biomimetic robotic fish that adopts a compliant design within a hybrid soft–rigid architecture: rigid, additively manufactured vertebrae embed opposing magnets that provide passive magnetic compliance, enabling soft-like undulatory bending and impact tolerance while retaining a pressure-tolerant, analytically tractable backbone. Rather than manual tuning, we optimize a low-parameter central-pattern-generator (CPG) controller via hardware-in-the-loop efficient global optimization (EGO). The EGO-tuned gaits deliver a 38% increase in cruising speed and a 35% reduction in turning radius relative to pre-optimization baselines, and achieve 29% energy savings when exploiting vortex wakes, while maintaining stable body-wave propagation across modular morphologies. To our knowledge, SpineWave is the first fish robot to realize soft-like compliance and field robustness using an entirely rigid, magnetically coupled exoskeleton–endoskeleton. This combination of passive magnetic compliance and data-driven CPG optimization advances soft-robotic locomotion and offers a pressure-tolerant, modular platform for long-duration environmental monitoring and exploration.
Keywords
Introduction
The accelerating demand for safe, energy-efficient exploration of the oceans has spurred rapid progress in underwater robotics, yet conventional remotely operated vehicles and autonomous underwater vehicles remain hamstrung by tethers, low propulsive efficiency, and limited adaptability.1–5 Recent studies highlight bio-inspired aquatic robots as potential instruments for ecological monitoring, animal–robot interaction, and cross-domain operations at the air–water boundary,6–8 with growing demonstrations in aquaculture water-quality monitoring, 9 fish–robot hybrid interaction experiments, 10 and autonomous surveillance in marine protected areas. 11 However, translating this promise into practice is constrained by requirements that cut across rigid, hybrid, and soft platforms: gentle physical interaction, impact tolerance, and energy-efficient undulatory propulsion. In this context, a central soft-robotics challenge remains: existing soft actuators cannot yet reproduce the high thrust, rapid maneuverability, and impact tolerance, which natural fish achieve through an exquisite integration of rigid vertebrae and compliant tissues. Soft robotic systems, therefore, lag behind their biological counterparts in locomotor versatility and energetic economy, while purely rigid linkages sacrifice compliance-based robustness for ease of modeling. 12 Bridging this gap demands a hybrid approach that delivers soft-like compliance without forfeiting structural predictability or manufacturability.
Modern teleost fish embody a hybrid paradigm: a segmented bony spine sets geometric limits, while surrounding muscle and connective tissues provide elastic recoil. This anatomically distributed passive–active synergy allows smooth body-wave propagation and efficient momentum exchange with the surrounding fluid, enabling the fast starts, tight turns, and cruise efficiency that have long captivated engineers. 13 Consequently, bio-inspired robotic fish have been developed along two dominant design lineages to replicate these capabilities. One approach employs rigid servo-driven joints, exemplified by robots like RoboTuna and SPC-III, to mimic skeletal kinematics with discrete actuators.14–17 These rigid-bodied robots can attain respectable swimming speeds, but their stiff hulls amplify collision forces and result in visibly discontinuous gaits. The opposite approach embraces soft elastomeric bodies actuated by pneumatic or dielectric actuators.18–21 Such soft-bodied robots eliminate hard edges and interact safely with delicate environments, yet their virtually infinite degrees of freedom complicate sensing and control, leading to modest speeds and high-power draw. Complementary soft-bodied propulsion platforms (for example, jellyfish-inspired robots) further broaden underwater manipulation and thrust-generation strategies. 22 Likewise, fish-like robots driven by shape-memory alloys or dielectric elastomers offer alternative routes to integrate compliance with more tractable dynamics.23,24 Across these diverse platforms, actuation modalities span from traditional propeller-based thrusters and tendon-driven transmissions to magnetic couplings and pneumatic or dielectric muscle systems. Most soft robotic fish (including our SpineWave prototype) are underactuated by design, leveraging embodied compliance for mechanical intelligence and simpler control; in contrast, some platforms incorporate additional actuators (i.e., over-actuation) to enhance maneuverability at the cost of increased control complexity. Indeed, the choice of under-actuation versus over-actuation fundamentally influences a robot’s maneuverability and control requirements. To harness the benefits of these compliant designs while mitigating associated control challenges, researchers worldwide have explored advanced bioinspired control strategies. For instance, central-pattern-generator (CPG) controllers and guidance-based algorithms have been implemented to achieve agile locomotion and robust navigation in underactuated robotic fish. Recent studies from multiple groups25–27 collectively demonstrate improved maneuverability, energy efficiency, and reliable path following in dynamic aquatic environments. Nevertheless, neither lineage alone delivers the dual promise of soft robotics: mechanical intelligence through embodied compliance, coupled with the analytical tractability prized in classical robotics.
Our proposal introduces a compliant design based on a hybrid soft–rigid architecture that resolves this conflict. Rigid, additively manufactured vertebrae are embedded with pairs of oppositely oriented neodymium magnets that act as “passive muscles,” generating restoring torques proportional to joint deflection without adding elastomers. SpineWave occupies a hybrid rigid–compliant niche: Its structure is fabricated entirely from rigid modules, yet passive magnetic joints endow each vertebra with muscle-like elasticity, achieving the embodied compliance, impact tolerance, and modular adaptability sought in soft-robotic systems, even in the absence of elastomeric materials. The resulting structure couples soft-like undulatory compliance, impact tolerance, and hydrodynamic efficiency to an entirely rigid, pressure-resistant backbone. Because every internal servo module has a single degree of freedom with analytically bounded range, the platform preserves the modeling convenience of servo fish while reproducing the graceful curvature of soft bodies. Prior ribcage magnetic actuation schemes produced traveling waves in open chains; 28 our magnetically constrained spine integrates those benefits directly into a servo motor-driven endoskeleton, yielding a simpler construction and lower part count.
A secondary innovation lies in the data-driven hydrodynamic optimization that tunes a low-parameter CPG controller by efficient global optimization (EGO). We conducted extensive circulating-water-tank experiments on one-, three-, and five-segment SpineWave morphologies under uniform flow speeds of 0.15 m/s and 0.30 m/s, as well as oblique inflows at 15° and 30°, and swimming in the wake behind a cylinder. Each morphology and condition involved on the order of 50–100 unique CPG parameter evaluations during optimization, ensuring that reported operating points reflect substantive sampling rather than isolated trials. Hardware-in-the-loop experiments raise cruise speed by 38% and shrink turning radius by 35%, demonstrating that passive magnetic compliance synergizes with our evolutionary training strategy to yield better performance. After EGO optimization, the turn execution time also reduced from 23 to 10 s, and under oblique/wake conditions, the robot achieved robust directional stability and an energy-saving mode (29% reduction in power consumption) by matching tail-beat frequency to the flow. This data-efficient optimization complements deep-reinforcement-learning approaches that exploit environmental wakes and tune body-wave parameters for energy-efficient locomotion,29,30 and it naturally aligns with integrated soft sensing for closed-loop control. 31 Although simple open-loop sinusoidal joint commands can generate periodic undulation, SpineWave’s passive magnetic compliance and multi-segment coupling introduce nonlinear, disturbance-sensitive dynamics that can cause phase drift and amplitude distortion under flow perturbations. We therefore adopt a CPG controller, whose coupled-oscillator dynamics naturally forms a stable limit-cycle attractor (phase locking) and enables smooth modulation of frequency, amplitude, and phase bias for maneuvering.32–36 The same controller generalizes across one-, three-, and five-segment variants because our hardware design is highly modular, enabling rapid morphotype switching from thunniform to anguilliform modes.
Field trials in a river and a 6 m-deep aquarium confirm that the rigid–flexible spine endures natural currents, repeated collisions, and prolonged salt-water immersion while causing little disturbance to local fauna. To contextualize these results, we compiled a literature-based cross-platform benchmarking that compares straight-line speed, minimum turning radius, near-surface snorkeling capability (dive/surface), and self-sustainability (degree of untethered, on-board operation) across representative robotic fish (Fig. 1, Table 1). Because direct side-by-side testing is infeasible and many publications omit certain metrics, we report missing values as “NA.” These results position SpineWave as an ecologically friendly, mechanically intelligent, and benchmarked advance in soft-robotic locomotion. By uniting modular rigid mechanics with embedded passive compliance, the platform opens a tractable design space in which mathematical control theory, evolutionary learning, and hard-shell durability can finally converge on the fluid grace of living fish.
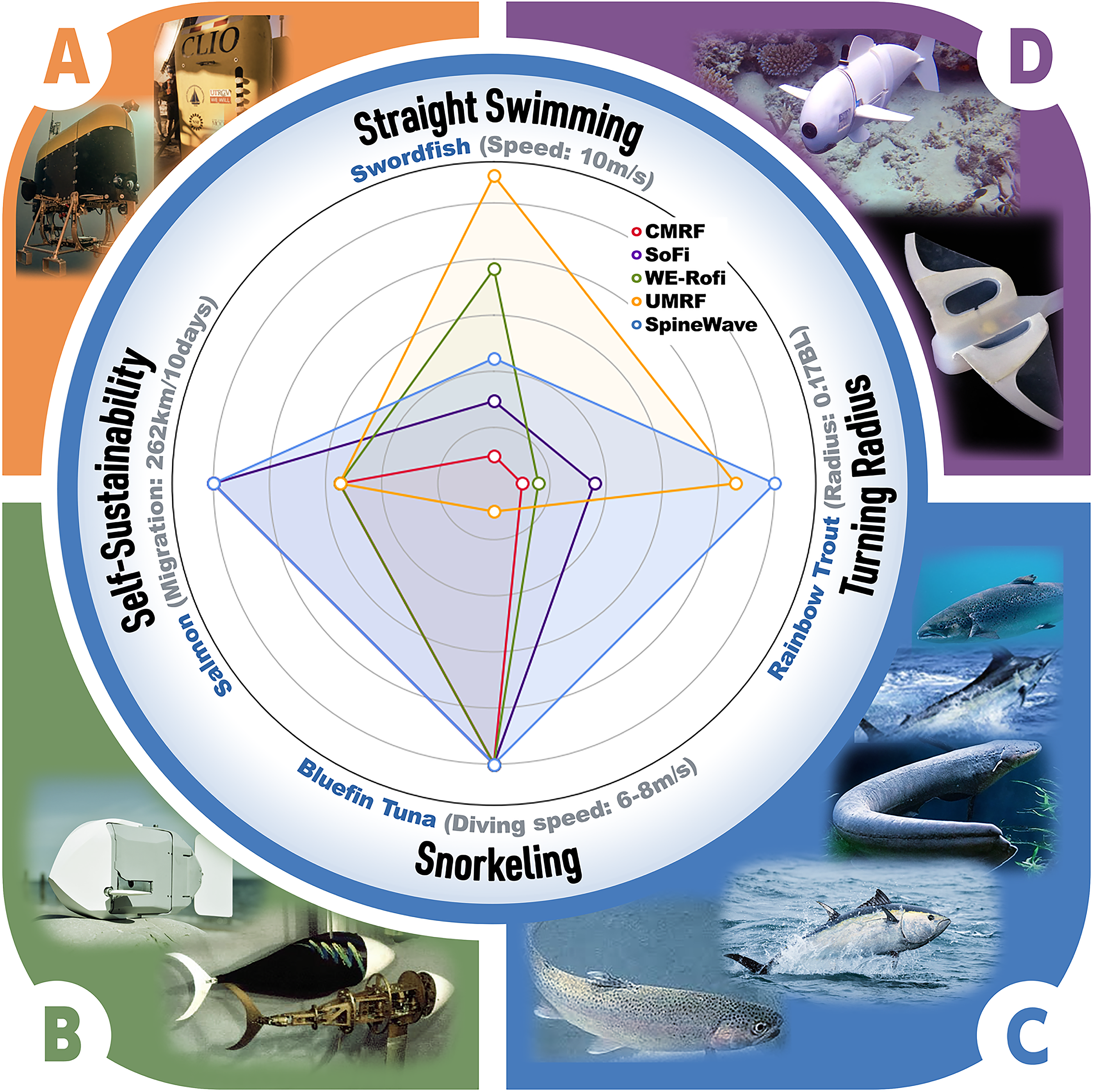
Graduation of body rigidity in swimming performance in aquatic locomotion. The counterclockwise directions in the figure are
Performance Comparison Between SpineWave and Existing Robot Fish
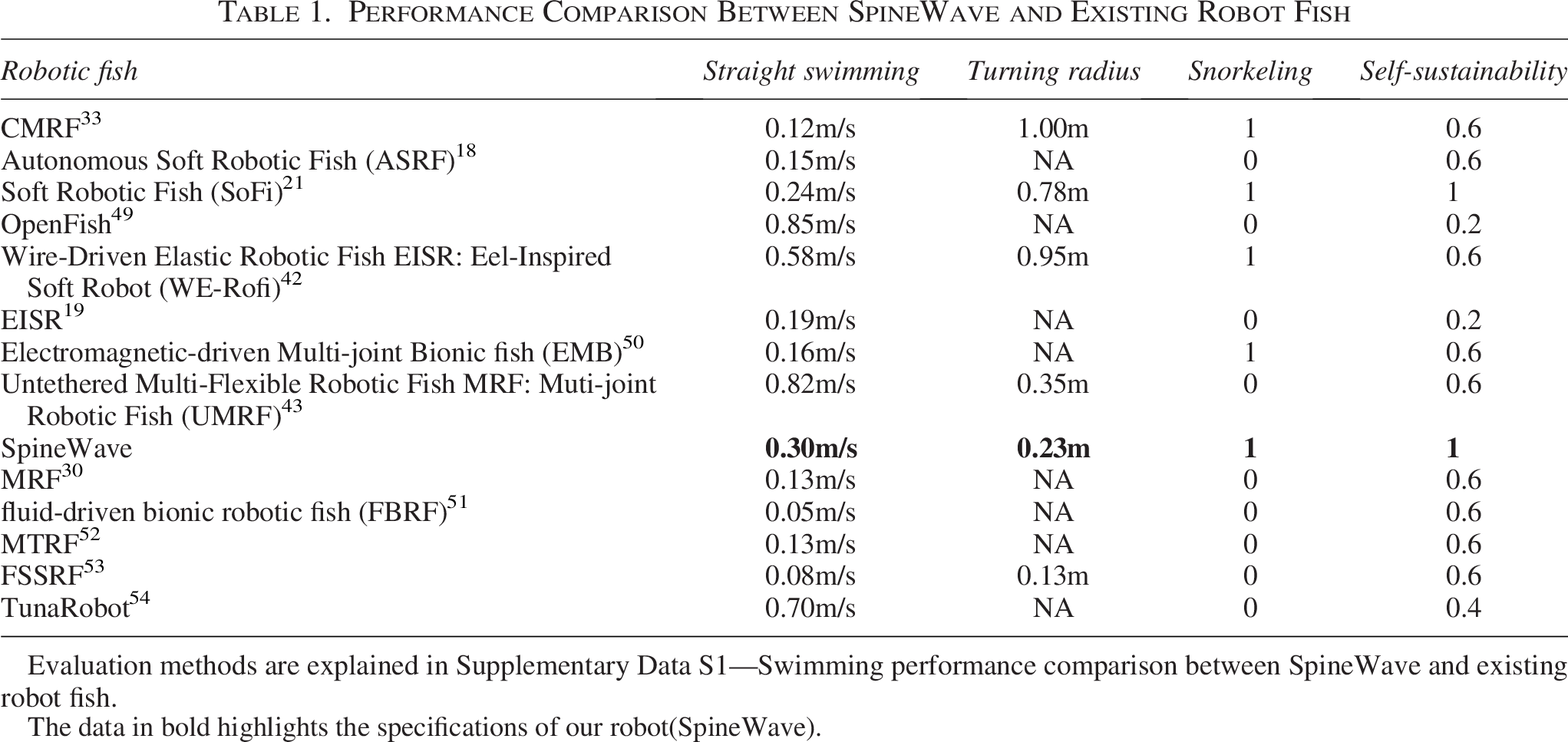
Evaluation methods are explained in Supplementary Data S1—Swimming performance comparison between SpineWave and existing robot fish.
The data in bold highlights the specifications of our robot(SpineWave).
Materials and Methods
In this section, we first document the design and fabrication of electronics, key structural components, and magnetic ribcage. Then, we review the CPG control model and the EGO algorithm.
Electronics design and fabrication
The electronic components of our biomimetic robotic fish are housed in a watertight container made from a transparent acrylic tube and 3D-printed endcaps. This design allows for easy inspection, leakage detection, and visibility of the controller’s debugging liquid crystal display (LCD). A custom printed circuit board (PCB) (Supplementary Data S2) consolidates wiring and provides structural support. To meet the high peak current demands of the servo motors during high-acceleration motion, we powered them directly from an 8.4 V 2S Li-ion battery. Two step-down voltage regulators supply stable 5 and 3.3 V outputs for the controller and sensors. Communication is handled by serial-to-433 MHz wireless modules, chosen for their signal penetration through water and extended range, enabling parameter exchange and real-time adjustments to the swimming patterns.
Structural components design and fabrication
We use additive manufacturing methods like Selective Laser Sintering (SLS) and Stereolithography (SLA) for the structural components of the biomimetic robotic fish. Materials were chosen based on mechanical and environmental requirements. SLA resin was used for water-tight parts with lower strength needs, while SLS nylon suited areas with moderate stress. For high-stress sections requiring rigidity, we selected SLS glass fiber–reinforced nylon. selective laser melting (SLM) titanium alloy was used for critical components such as the servo motor bracket, ensuring strength, durability, and chemical resistance.
Magnetic ribcage design and fabrication
The magnetic ribcage, a key structural component, is made from SLS nylon and consists of vertebrae and magnetic rail units. Each assembly includes two vertebrae and four N52 neodymium magnets (4 mm × 5 mm) in the rail units. These modular rail units can be replaced with two M2 screws for easy adjustments. The magnets are customizable for different operational needs. When assembled, the ribcage forms a robust, protective frame, enhancing the robot’s structural integrity.
The vertebrae are connected with rotation joints using self-lubricating brass bushings, locknuts, and M2 screws, all selected for corrosion resistance and maintenance ease in aquatic environments. The ribcage underwent extensive testing, including a 10-day submersion. Its dynamic behavior showed minimal change, confirming its durability. Theoretical models predicting magnetic forces and interactions between the endoskeleton and exoskeleton ribcages are detailed in Supplementary Fig S8.
We quantified magnetic force versus rotation angle using a custom rig with a stepper-driven rotor, freely rotating stator, and a linear force sensor, testing multiple pre-rotation angles including the 13° configuration used in SpineWave. The measured force–angle curves were compared with a dipole-interaction model, confirming predictive fidelity and showing how mounting angle tunes restoring torque (full details in Supplementary Data S3 and S4). We then embedded the experimentally derived torque–angle relation into a multi-joint Simulink model of the rib-and-vertebra chain. Predicted joint trajectories were validated on a dynamic test rig by tracking representative joints (1, 6, 7) across 0.4–1.0 Hz; overlays show close agreement (see Fig. 2C; full details in Supplementary Data S5). This pipeline links the engineered passive magnetic compliance to predictable body-wave kinematics used in our results.
Central pattern generators control method
We implemented the CPG control model for our robot. CPGs are neural networks that generate rhythmic motor outputs independently, similar to biological circuits controlling activities such as walking and swimming.
55
Our robot uses a CPG model to achieve coordinated movements of the body joints and pectoral fins, ensuring a lifelike motion. This CPG model reduces control complexity significantly, offering simplicity for optimization and practical use. The specific formulation of the CPG used is detailed as follows:

Efficient global optimization
EGO is a well-known sequential adaptive sampling method for black-box optimization problems, and its key steps have been discussed in the evolutionary propulsion optimization section. In EGO, the Kriging surrogate is used to replace expensive black-box functions. The prediction output of a Kriging model can be expressed as a linear combination of the output responses of the training points near the prediction point,
56
as follows:






The variance of the output model is estimated as:

The unknown parameters 

Once the Kriging model is established, we update the next sampling point 
Initialize the database DB with the training data set (LHS with 10Dim).
Kriging modeling
Expected improvement-based infill criteria using the GA to obtain the current best solution
Evaluate
Update DB &
In the context of the CPG control model, several key parameters including intrinsic frequency ω, gain coefficient k, phase offset θ, amplitude ε, and baseline offset b were encoded as decision variables within the EGO framework. Unlike manual or heuristic methods, the EGO algorithm adaptively samples and learns the response surface of hydrodynamic performance in a low-data regime, achieving convergence to optimal motion patterns through iterative evaluation. The optimized parameter set was selected based on the convergence of the mean thrust coefficient and torque minimization criteria, as shown in Figure 3A and Supplementary Data S7. As detailed in Supplementary Data S8, based on an offline training data set (10Dim training points, where Dim refers to the number of optimized parameters), the optimization loop operates online while the robot swims (Supplementary Fig. S10 shows the test equipment and the robot fish placed in the circulation tank). During each experimental bout, based on the EI function, the EGO algorithm outputs an optimal candidate set of CPG parameters in the population, including intrinsic frequency ω, amplitude gains ε1–ε3, phase bias θ, and baseline offset b, to the controller. The robot then swims using this set of CPG parameters (straight mode in a flume with a constant flow rate or turning mode in still water); the robot is mechanically coupled to the test rig through an in-line six-axis force/torque transducer. During each ∼30 s bout, the transducer records hydrodynamic reaction forces and moments; we compute the time-averaged thrust (straight mode) or time-averaged yaw torque (turning mode) and transmit this measurement to the host computer, where the Kriging surrogate is updated before the next EGO iteration. The new control parameters are transmitted and applied to the CPG model, closing the hardware-in-the-loop optimization cycle between iterations. Here, we set 5Dim iterations for online optimization, after which the best-found parameters are applied to the CPG model of the robotic fish for extended free-swimming trials. Thus, the EGO routine and the robotic fish form a continuous closed loop, with parameters iteratively refined and deployed online. Full force and torque measurement and parameter optimization process are provided in Supplementary Data S8. To balance accuracy and efficiency and validate that the proposed optimization approach can extract more informative experiments under a strictly limited number of new samples, we capped the optimization budget at 10 × Dim initial Latin-hypercube samples (to build the first Kriging surrogate) plus at most 5 × Dim additional online evaluations during swimming. Regarding computational time, the numerical part of EGO is negligible in our setting: updating the Kriging surrogate and maximizing the expected-improvement criterion take < 1 s on the laptop because the problem involves only six CPG variables and a small archive (15Dim samples). The dominant cost is the hardware evaluation: After each iteration, the newly suggested CPG parameter set is flashed to the controller, and the fish swims for 30 s to generate the thrust (straight mode) or yaw-torque (turning mode) measurement that is streamed back to the optimizer. After optimization, the best-found parameters are uploaded once more and the robot is released for extended free-swimming tests, providing real-world validation with no additional computational overhead.
During EGO, the six-axis transducer provides performance measurements for the optimizer between trials, not real-time feedback control during free swimming. Specifically, the hardware in loop (HIL) loop is: CPG parameters → 30 s swim bout → measured mean thrust/torque → EGO surrogate update → next parameters. After optimization converges, the selected CPG parameters are fixed, and the robot is released for subsequent free-swimming and field experiments in open-loop gait execution (on-board IMU/encoders are used for logging/teleoperation support rather than hydrodynamic feedback control).
Results
Robotic design and construction
SpineWave employs a fully modular architecture comprising interchangeable head, body, and tail units linked by waterproof connectors that enable rapid reconfiguration and straightforward maintenance (Fig. 4). The streamlined head shell encloses the electronics pod, battery, sensor array, and detachable servo-driven pectoral fins for enhanced maneuverability. The central body integrates five actively actuated internal segments with a passive magnetic exoskeleton and buoyancy blocks to mimic fish musculature and natural flotation (Fig. 4B2–B4). A screw-mounted interchangeable tail fin delivers thrust, with profiles easily swapped to suit mission requirements. Teleoperation is achieved via 433 MHz radio and 5.8 GHz camera for video streaming, and depth is controlled through adjustable buoyancy and ballast. In endurance trials, a three-segment SpineWave swam 800 m in 50 min.
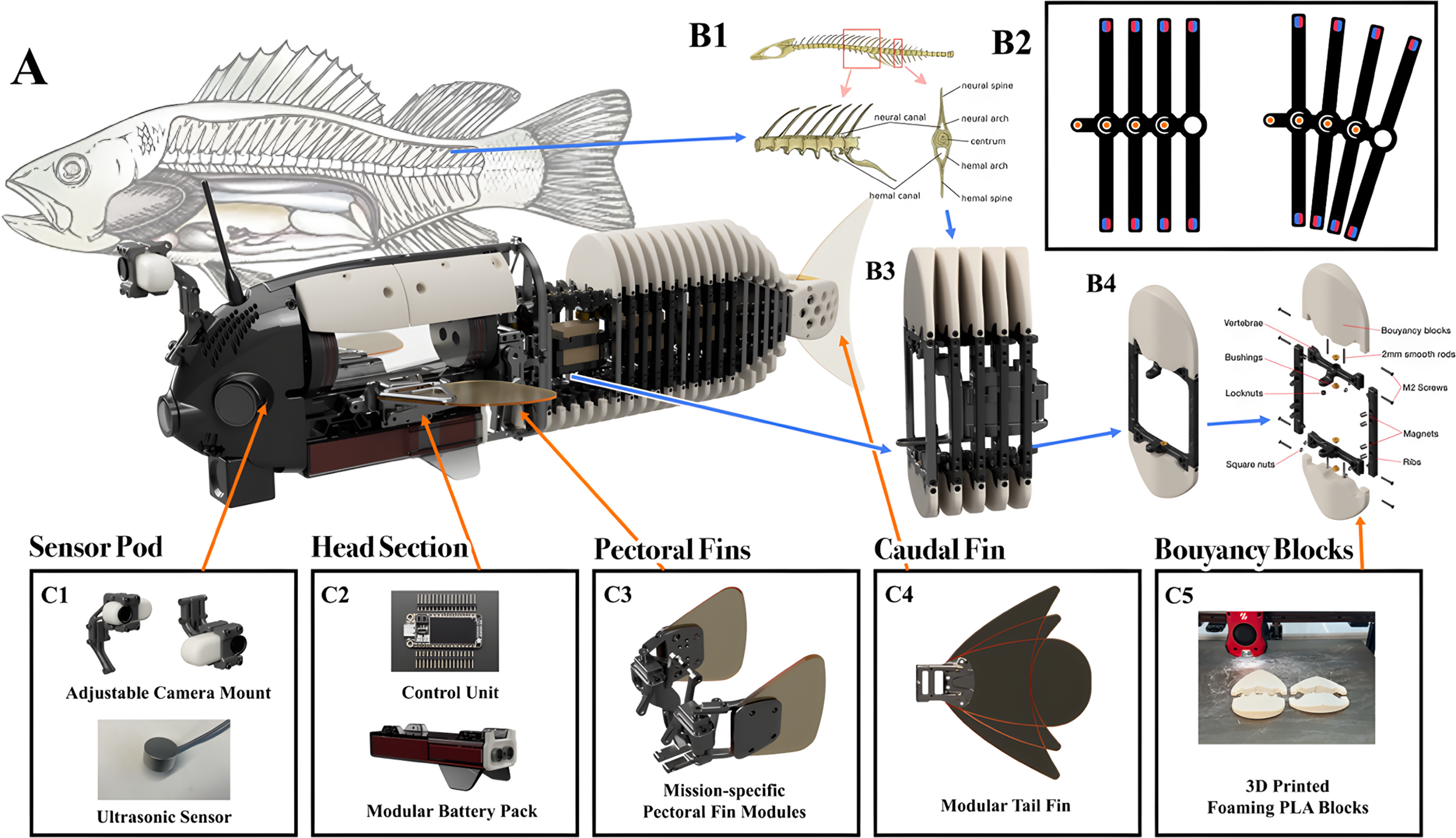
Design and Assembly of the SpineWave.
All fabrication details, component specifications, magnetic-spring theory, control electronics, communication hardware, and additional performance data are provided in Supplementary Data S9.
Magnetically constrained bionic exoskeleton
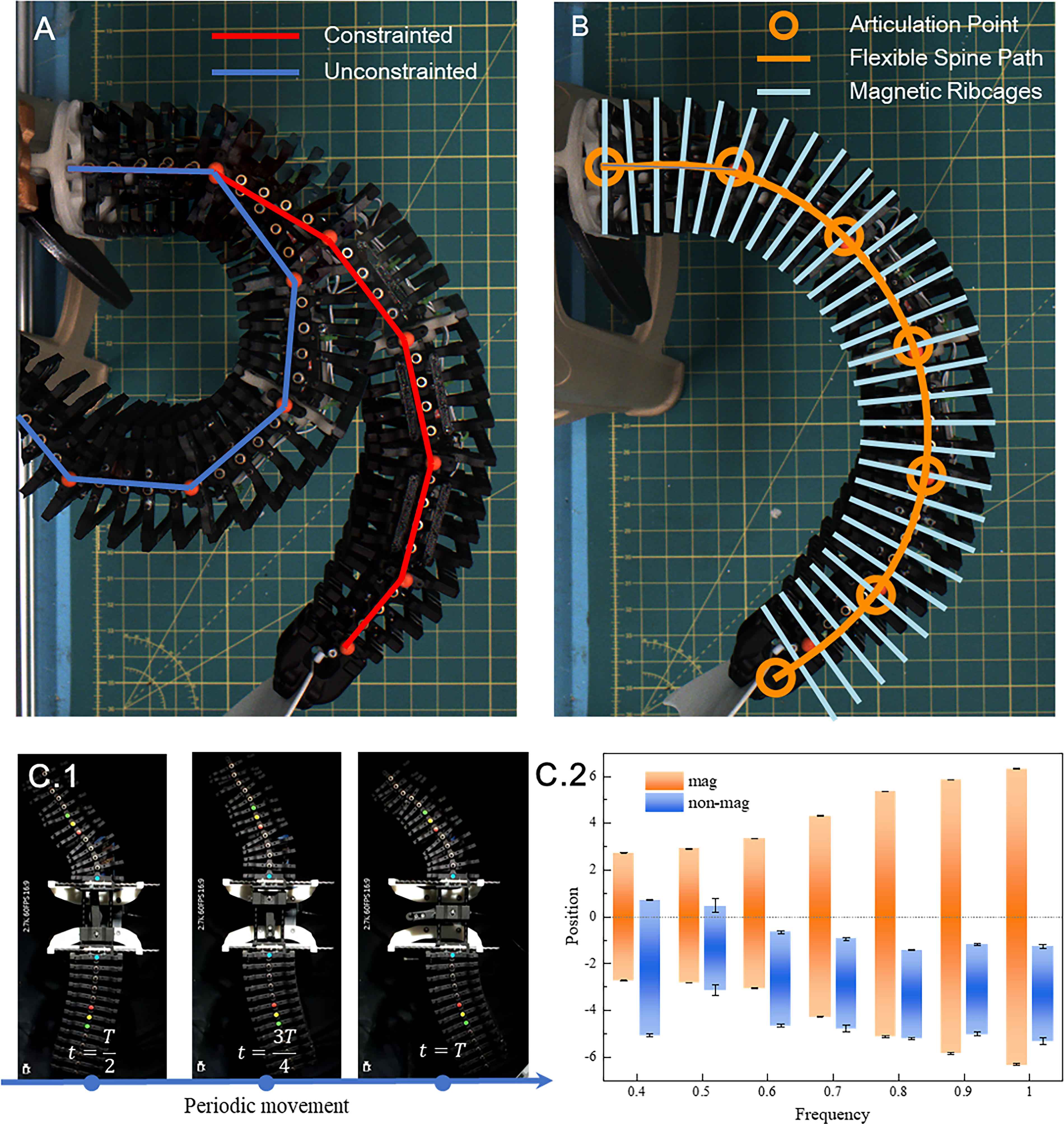
To assess the magnets’ effect on bending, we compared rigidly constrained (simulating traditional servo fish robots) and magnetic segments (our design) (Fig. 2A). Constrained joints reach 30° per segment (red line), unconstrained reach 50° per segment (blue line), showing the latter’s greater flexibility and maneuverability. Two kinematic simulation programs were developed: one models joint angle vs. magnetic repulsion (using magnet parameters and frame dimensions); the other uses simulated magnetic force and endoskeleton servo angles to find exoskeleton joint angles. As quantified in the Supplementary Data, Supplementary Fig. S1, measured force–angle curves agree with the dipole model and reveal how the magnet placement sets the effective stiffness profile. Simulations closely match experimental results (Fig. 2B). (Comparisons in Supplementary Data S3, Supplementary Figs. 2 and Movie S2).
Due to the challenging nature of full dynamic simulation, our analysis focused on demonstrating magnetic constraints’ stability enhancement over non-magnetic systems. While predicting passive joint angles in water is a future goal, this validates stable body wave maintenance. Experimentally, we compared 13-rib exoskeleton modules with/without magnets (replacing magnets with steel balls for equal weight). (Device details: Supplementary Data S4). Figure 2C.1 shows module deformation at different cycle instants (t = T/2,3T/4, T) at f = 0.7 Hz. The magnetic module showed smooth, waveform-conforming movement; the non-magnetic module showed chaotic motion.
Figure 2C.2 compares joint 7 amplitude at different frequencies. The magnetic module was stable around baseline (y = 0); the non-magnetic showed larger variations with non-zero mean offsets. Simulations confirmed these results. (Details: Supplementary Data S5, Supplementary Movie S3). While a full Lyapunov-based formal stability analysis was beyond the scope of this work, we conducted extensive empirical evaluations to assess system stability. Through EGO-based optimization, the robot’s gait exhibited significantly enhanced directional stability and reduced undesired motions, such as lateral head sway. This data-driven tuning process effectively selects CPG parameters that lie within a regime of smooth, robust oscillation, inherently filtering out unstable or inefficient configurations. By optimizing directly on the physical robot in water, the method captures real fluid-structure interactions and environmental noise, resulting in a gait naturally adapted to real-world dynamics. The resulting CPG exhibits a strong limit-cycle attractor with intrinsic phase-locking and disturbance rejection properties, minimizing off-axis motions and suppressing unstable modes. Specifically, we compared joint-level motion consistency in modules with and without magnetic constraints (Fig. 2C.2), and found that the magnetically constrained design demonstrated minimal amplitude drift and waveform distortion under varying frequencies, indicating strong dynamic stability. In addition, long-duration and cross-environment testing (see subsection Open water human–robot interaction), including open-water and seawater immersion, confirmed that the robot maintained consistent performance across diverse conditions. These results, along with prior studies demonstrating CPG stability in similar configurations,55,59 provide strong empirical evidence supporting the robustness and reliability of the system in real-world aquatic environments.
Scalable modules for emulating diverse body caudal fin fish locomotion
SpineWave mimics fish skeletal structure60,61 with a modular, scalable design of interconnected, vertebra-like jointed parts. These offer support and undulatory movement flexibility. The modular approach allows quick customization for different fish species’ swimming. Each segment is independently balanced and tuned for buoyancy, so segment number changes don’t affect overall weight/buoyancy. Current modularity is limited by control system complexity; future work may explore more, but current design (1, 3, 5 servo segments) balances performance and control.
To show hardware modularity, three biomimetic robotic fish were built (Fig. 5), serving as testbeds for thunniform, subcarangiform, and anguilliform locomotion (Fig. 5). (Details/videos: Supplementary Data S6, Supplementary Movies S4–S6).
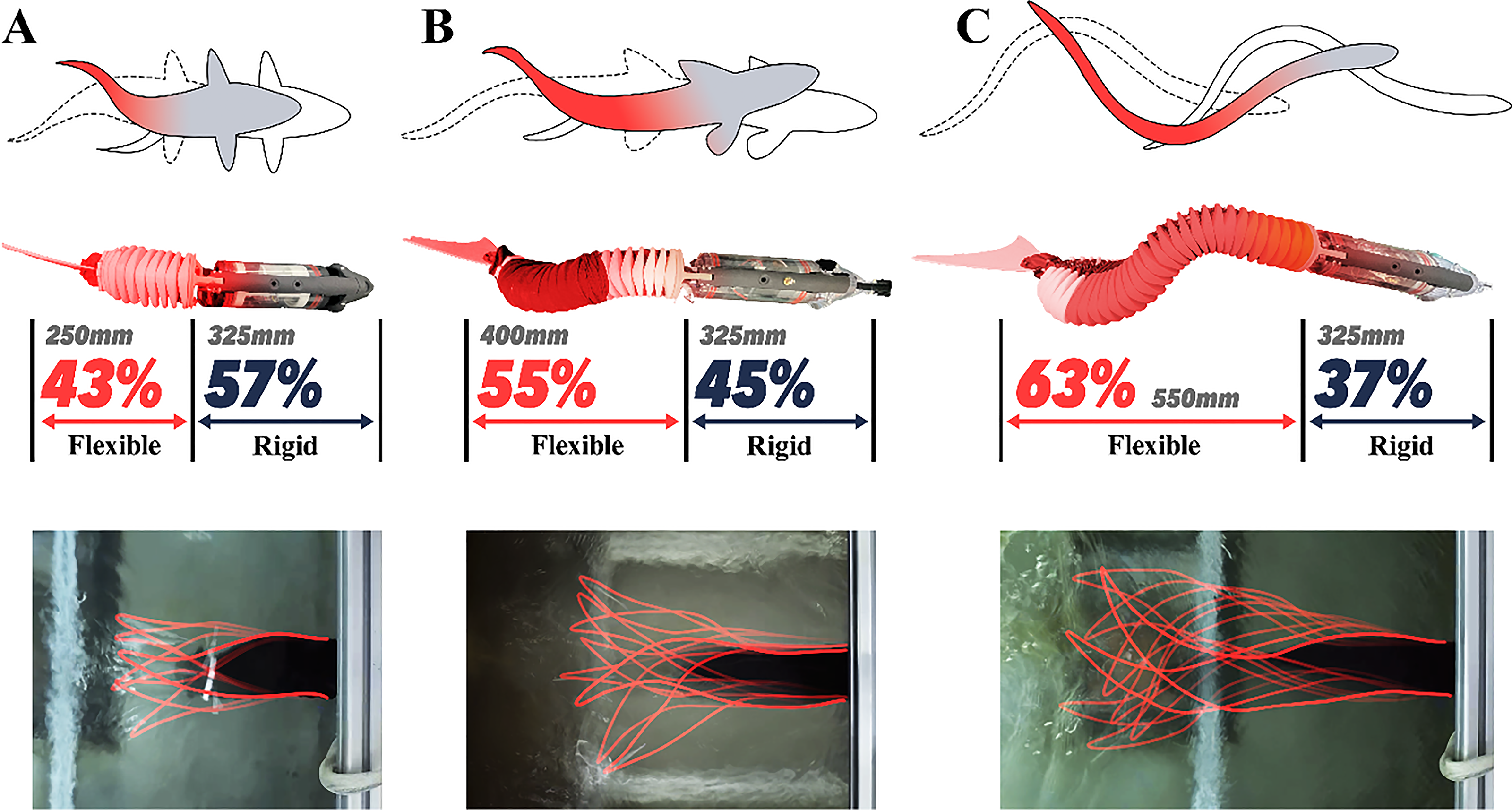
Comparison of three fish robot prototypes. (From Top to Bottom) Simplified diagram of real fish. Body proportions of SpineWave-I/II/III. Top view of three SpineWave prototypes on the testbench, image traced and stacked to showcase flexible section of the body. Column
Evolutionary optimization for hydrodynamics
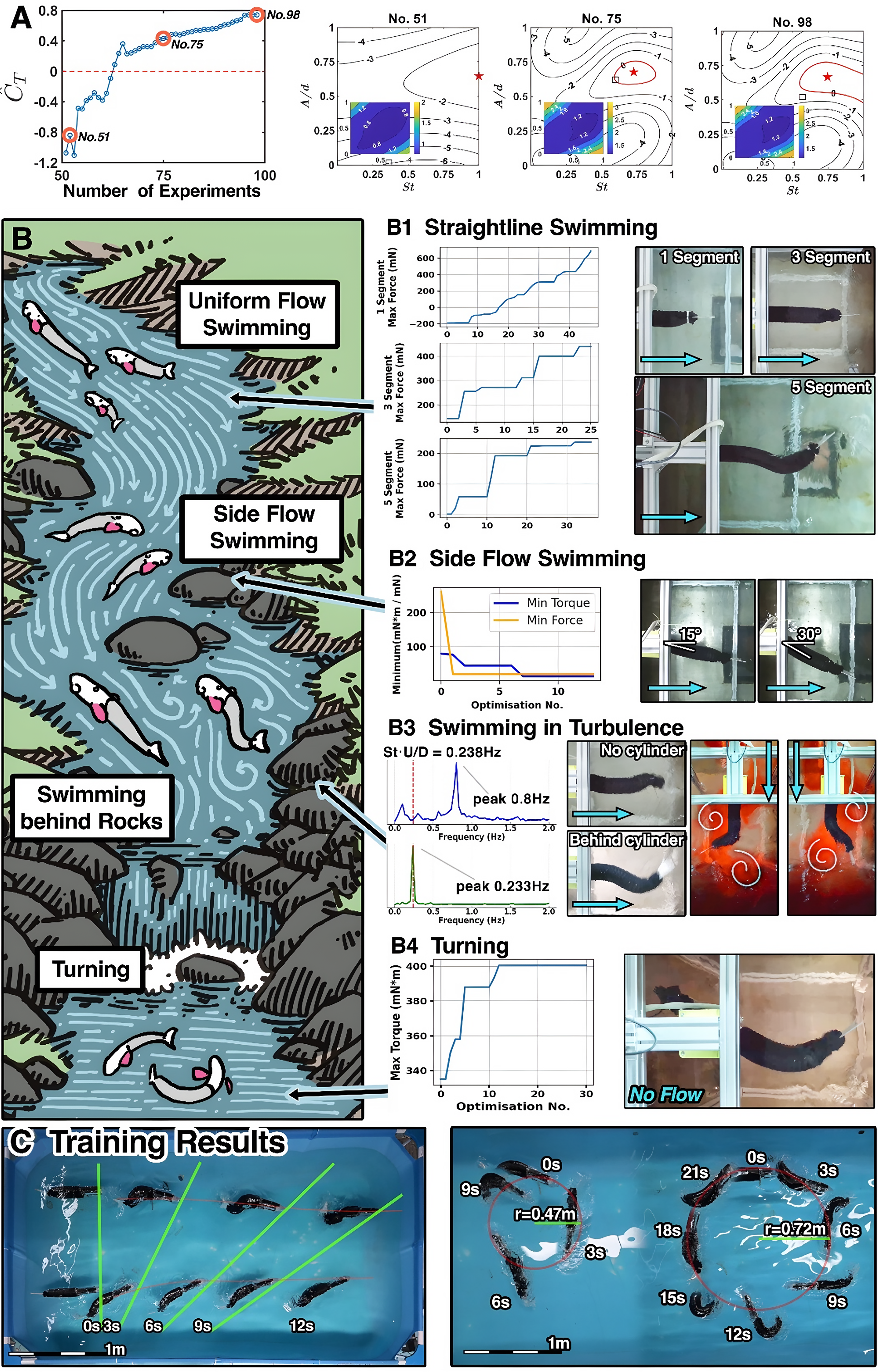
To enhance SpineWave’s swimming performance, we first optimized its hydrodynamics in a stationary configuration (Fig. 3B) and then applied the optimized control strategy to a free-swimming version (Fig. 3C). A CPG 55 model controlled robot movement using seven parameters that were optimized by an in-house EGO algorithm. 62 Objectives varied by flow conditions: for straight-line swimming (Fig. 3B1), we aimed to maximize positive mean thrust; for side flow conditions (Fig. 3B2), we actively varied flow angle and minimized mean thrust and torque for stable orientation; in turbulent environments (Fig. 3B3), we sought a swimming pattern with near-zero mean thrust behind an obstacle (a cylinder to induce a Kármán wake), utilizing vortex shedding for energy savings;63,64 and for turning in still water (Fig. 3B4), we optimized for maximum torque about the center of gravity. In the experiment, each robot was connected to a six-axis force sensor, and a video camera placed above the tank captured its motion. The force/torque transducer is part of the external HIL measurement rig used during optimization and is not used as an on-board real-time feedback sensor during subsequent free-swimming trials. The camera is used to provide data solely for parameter search. After training is complete, the camera is no longer used, and the robot fish relies on onboard IMU, motor encoders, and pre-trained parameters for open-loop control. For additional experimental details, please refer to Supplementary Data S7 and Movie S7. A brief overview of the CPG model and EGO algorithm is provided in the Materials and Methods section.
Figure 3A illustrates a typical EGO process and the results of the robot in the uniform flow at
Close water swimming performance
To evaluate the robot’s performance after optimization, we conducted straight-line swimming and turning experiments in a 4 m × 2 m water tank. Figure 3C shows top-view videos and motor actions before and after optimization for both swimming (Fig. 3C, left) and turning (Fig. 3C, right). Pre-optimized parameters were selected from 50 random samples in the initial Kriging model with the best hydrodynamic performance. Significant improvements were seen, especially in swimming speed, turning velocity, and radius. The head’s lateral motion was reduced, indicating improved stability.
Normalized by body length (BL: 0.725 m), the straight-line swimming speed increased from 0.32 to 0.44 BL/s (38% improvement). After optimization, the robot completed a 360° turn in 10 s, down from 23 s, with a turning radius reduced by 35% (from 1 to 0.65 BL). These improvements demonstrate enhanced performance, supporting the robot’s capabilities in complex environments. For more details, see Supplementary Movies S8 and Movie S9.
Open water human–robot interaction
After optimization, we first tested the SpineWave in open water at Westlake University’s Yungu campus (Fig. 6A). The 3-joint SpineWave featured a dual camera system, including an underwater drone camera and an Insta360 Go 3 action camera, for assessing endurance and maneuverability. The drone camera streamed live footage to a POV(point of view) headset, offering real-time observation. The SpineWave was wirelessly controlled, with a DJI Mini 3 drone tracking its trajectory. The robot operated in open-loop mode, utilizing previously trained parameters for efficient locomotion. The onboard sensors were used for datalogging and to assist teleoperation. Both the robot and drone, with controllers, are shown in Figure 6B, and operators in action in Figure 6C.
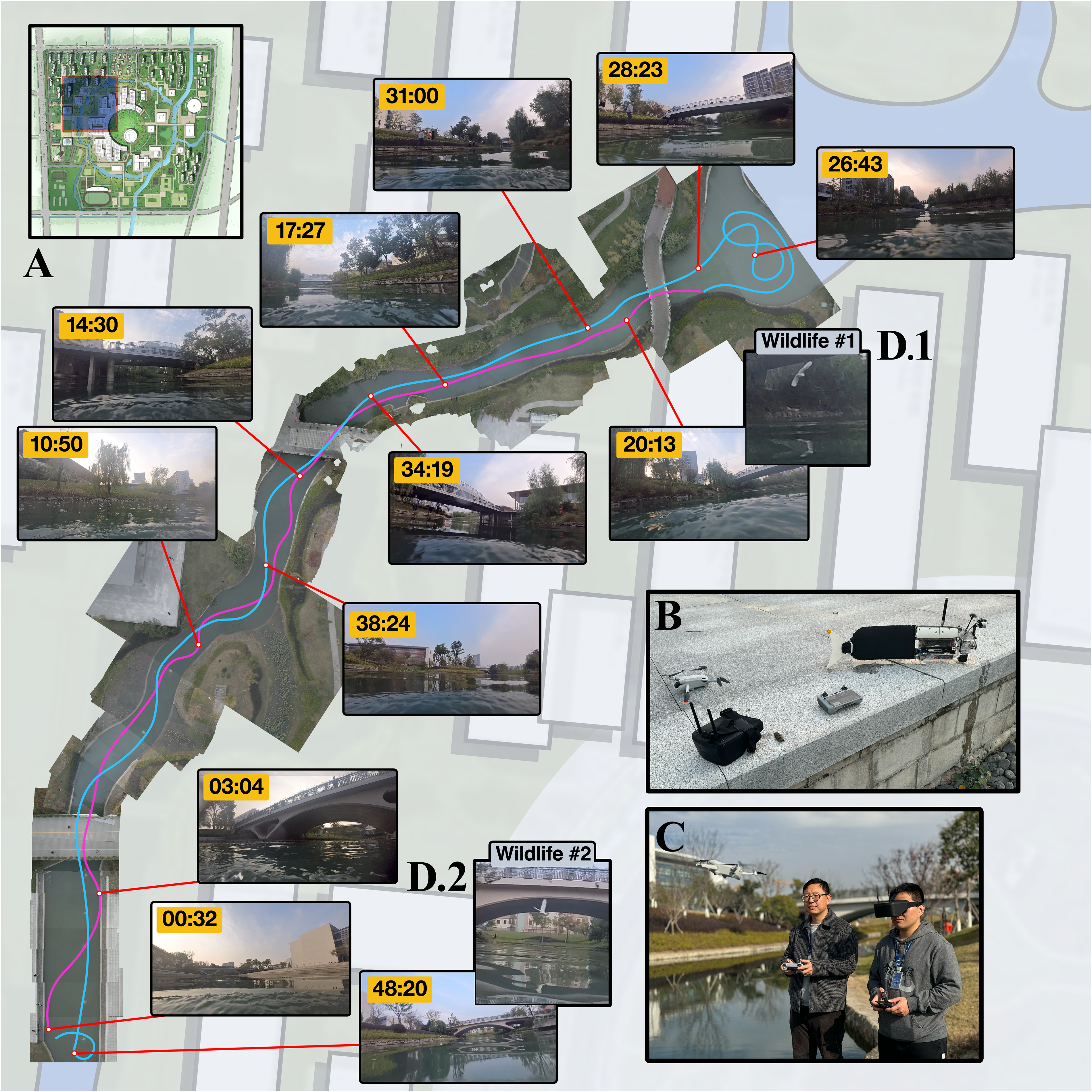
Overhead drone footage tracking the trajectory of the biomimetic robotic fish, composed onto a 2D map of Westlake University.
Figure 6 showcases the 50-min trajectory of the robot in the water ring, covering a roundtrip distance of 800 m. The robot showed excellent speed, battery life, and a small turning radius, navigating complex natural waters with minimal control latency. Inset footage from the action camera provides the robot’s perspective along the ring. For more details, see Supplementary Movie S10.
Notably, during our operation, our robot had two opportunities to interact with the local wildlife, approaching an egret without any disturbance and capturing intimate footage (Fig. 6D.1, D.2), which highlights the biomimetic design’s potential for environmental monitoring.
We also tested the robot in the Deep-Sea Pavilion of Polar Ocean Park, a 6 m-deep environment with diverse marine life. This setting presented challenges due to varying scales and behaviors of organisms. The single-jointed SpineWave was adjusted for seawater density, minimizing energy requirements for vertical maneuvers. It was equipped with an LED illuminator and waterproof camera to capture POV footage (Fig. 7D), while a diver and stationary camera tracked its movements.
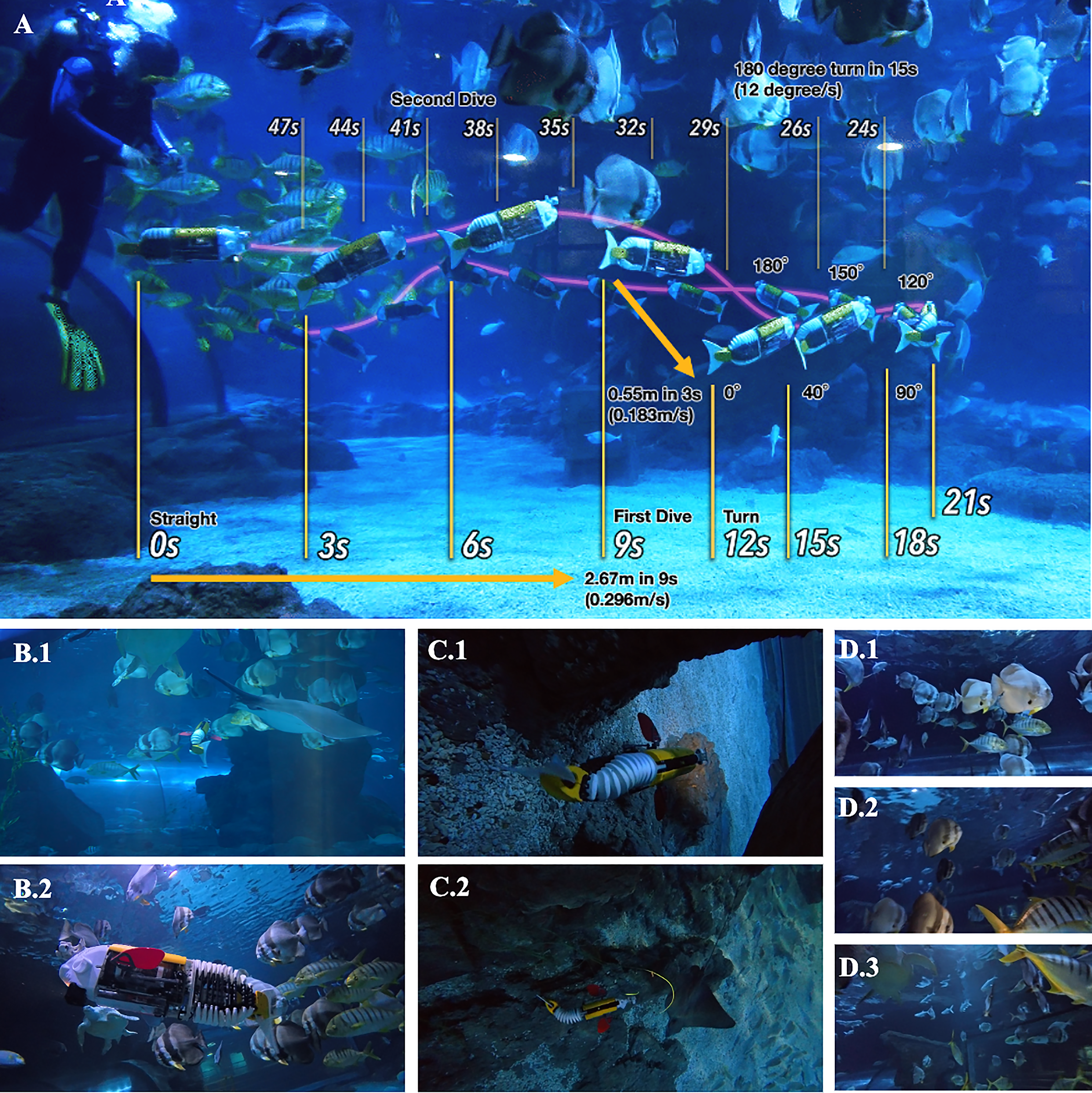
Swimming in a simulated undersea environment.
Preliminary observations revealed the SpineWave could interact with marine life without causing disturbance. Even at close range, fish did not flee (Fig. 7B). Figure 7C shows the SpineWave navigating narrow openings. Supplementary Movies S11 and Movie S12 highlight the SpineWave’s exploration and interactions, demonstrating its potential for seamless integration into natural underwater environments.
Discussion and Conclusion
The SpineWave bionic fish robot draws inspiration from fish anatomy, combining rigid and flexible structures with magnetic constraints for biomimetic underwater propulsion. By blending the natural flexibility observed in fish with the strength of rigid structures, we have engineered a field-robust robotic fish capable of operating in diverse environments and supporting emerging application domains including environmental monitoring 6 and aquaculture monitoring, 9 animal–robot interaction experiments, 10 autonomous surveillance in marine protected areas, 11 and close-range inspection of underwater infrastructure. 65
Despite containing no soft actuators or elastomeric materials, SpineWave can be regarded as a hybrid rigid–compliant system aligned with soft robotics principles. It leverages passive magnetic compliance at its joints and a segmented modular architecture to achieve traits typically associated with soft robots while preserving the predictability and durability of a fully rigid design. In effect, SpineWave bridges the gap between traditional rigid fish robots and actively actuated soft robots, attaining soft-robot-like undulation and resilience through structural design alone, without relying on pneumatic or elastomeric actuators.
The modular design, as the cornerstone of SpineWave, enables swift hardware iteration and on-site reconfiguration for mission-specific sensing and mobility. For example, the head module can integrate cameras and water-quality sensors to support long-duration environmental monitoring and aquaculture deployments, while the quiet, compliant body-wave and impact-tolerant joints facilitate close-range observation and animal–robot interaction experiments with minimal disturbance. In addition, the pressure-tolerant rigid housing and modular payload bay make the platform compatible with persistent field tasks such as surveillance and patrolling in marine protected areas and inspection around submerged or partially confined infrastructure. Three biomimetic prototypes demonstrate versatility, with scalable one-, three-, and five-segment morphologies and dedicated fin modules for enhanced swimming capabilities.
To optimize SpineWave’s swimming dynamics, we implemented an in-house online evolutionary training algorithm based on EGO. This approach, which tuned the robot’s control parameters for straight-line swimming and turning maneuvers, significantly improved swimming performance with only a small number of real-world trials. We also conducted experiments to characterize the relationship between frequency/amplitude and forward velocity of our single-jointed robot fish. (Supplementary Fig. S13) These results serve as the basis for a new proportional control scheme for the SpineWave-I, allowing for smooth, analog joystick adjustment of swimming speed based on these proven frequency/amplitude mappings. Field tests in open-water environments further validated SpineWave’s capabilities and its potential for environmentally friendly aquatic tasks. Future experiments will expand the performance metrics we evaluate and explore additional aspects of mobility, such as rapid acceleration/deceleration, precise station-keeping, and vertical diving/surfacing control, to continue improving the robot’s locomotion through iterative design optimization.
Building on this success, we plan to enhance the optimization framework itself in future work. Specifically, we intend to use a Gaussian process model with a periodic kernel for the phase variable and radial kernels for other parameters, combined with a noisy expected improvement acquisition function with a probability of feasibility to better handle experimental constraints. We also aim to implement a trust-region strategy and replicate certain evaluations to account for local noise in measurements, as well as explore small-batch evaluations to increase hardware optimization efficiency. Together, these advanced optimization techniques are expected to further refine the robotic fish’s locomotion performance and will be explored as part of a broader effort to continually improve SpineWave’s capabilities through advanced optimization methods.
As we refine the design, we also consider improvements to the spinal stiffness profile of the robot. Currently, the modular exoskeleton uses neodymium magnets for uniform stiffness, but research suggests non-uniform stiffness could improve swimming efficiency. 66 Future optimization could include active electromagnets, offering tunable stiffness for better performance across environmental conditions and swimming speeds. 67 Furthermore, Future designs may incorporate tunable stiffness 68 and distributed actuators like pneumatic muscles 69 or dielectric elastomer actuators 70 for enhanced efficiency. 54 Notedly, the magnet implementation has no moving parts, making it suitable for prolonged use in harsh environments like deep water with high pressure 65 or corrosive coastal areas. 71
Additionally, a current limitation involves the relatively long, rigid head segment, necessary for housing core components, which may affect swimming stability due to its lack of active stabilization; while modular buoyancy elements help mitigate this, it represents a trade-off between functionality and optimal biomimetic dynamics.
Our focus is on replicating fish spine function. We currently use cotton stockings to cover the body. Our current iteration also does not have closed-loop fluid sensing capabilities and relies on pre-trained control parameters. In future iterations, we will integrate distributed soft strain sensing and lateral-line-inspired flow sensing to adapt CPG parameters online, moving from the present optimizer-in-the-loop sensing setup to true on-board closed-loop fluid–structure interaction control. We acknowledge the multifunctional roles of fish skin in flexibility, 72 adaptability, 73 hydrodynamic efficiency, 74 and sensory capabilities. 75 Advancements in bio-inspired sensing technologies, 76 especially the flexible sensing, 77 will allow future robots to enhance environmental awareness,78,79 dynamically adjust control parameters,80,81 mimicking the adaptive behavior of living fish.
Finally, while our current evolutionary learning framework using EGO efficiently optimizes control parameters under various flow conditions, 82 it has inherent limitations. EGO’s iterative process becomes computationally expensive as the number of trials increases 83 and as the parameter space grows in dimensionality. 84 To overcome these challenges, we envision leveraging more powerful machine learning techniques. For instance, deep neural networks could help model the complex relationship between control inputs and swimming performance on larger datasets. 85 In combination, reinforcement learning algorithms 86 would allow the robotic fish to continually learn and improve its behavior through trial-and-error interaction with the environment. With the addition of advanced sensing and fin actuation systems, such AI-driven approaches could enable SpineWave to adapt autonomously in both laboratory tests and unpredictable real-world environments. 87 Taken together, these advancements in design, sensing, and learning will bring us closer to creating robotic fish with unparalleled versatility and efficiency, truly reflecting the complex adaptations of biological fish.
Authors’ Contributions
W.K.L. conceptualized the biomimetic robotic fish. Q.H. developed the biomimetic robotic fish, including the design and fabrication of the interface module. W.K.L. developed the locomotion model and control software of the biomimetic robotic fish. G.M.D. developed the simulation of bionic exoskeletons and data processing of experiments. H.C. developed the evolutionary algorithm in experiments. Q.M.L. and J.Y. developed the algorithms for collecting and integrating all data sensors in the experiment. Q.H., G.M.D., and W.K.L. performed pool experiments as well as water ring experiments and wrote the article. X.Q.T. was responsible for circulating water tank and optimization experiments. W.C.C., M.S.T., and D.X.F. were responsible for the overall research direction, objectives, and funding.
Footnotes
Acknowledgment
The authors thank Boai Sun, Fei Han, Xinyu Zeng, Zhen Yang, and Anqi Zhang for their contributions.
Author Disclosure Statement
The authors declare that they have no competing financial interests.
Funding Information
Young Scientists Fund of the National Natural Science Foundation of China (No.52401393). Zhejiang Province Leading Goose Plan Project (Grant No. 2025C02017). Innovative Research Foundation of Ship General Performance under Grant No. 31422225. The National Key Research and Development Program under Grant No. 2022YFC2805200. The Research Center for Industries of the Future at Westlake University. Westlake Education Foundation under Grant No. WU2022C036 and WU2024C001. Scientific Research Funding Project of Westlake University under Grant No. 2021WUFP017.
Data and Materials Availability
Supplemental Material
Supplemental Material
Supplemental Material
Supplemental Material
Supplemental Material
Supplemental Material
Supplemental Material
Supplemental Material
Supplemental Material
Supplemental Material
Supplemental Material
Supplemental Material
Supplemental Material
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.