
Abstract
The traditional structure of machines (such as lathe, milling, shaper, slotter, drilling and planer) has become questionable because of the modular concepts (such as modularity, scalability, convertibility, mobility and flexibility) and reconfiguration becomes a promising approach towards modular manufacturing machines, in which manufacturing techniques are independent of changes. In this area, reconfigurable machine tool (RMT) forms a new class of modular machines in current manufacturing scenario where the manufacturing industry put a strong pressure on good quality and price reduction. The capabilities of the machines tool and manufacturing systems in reconfigurable manufacturing system (RMS) change with each reconfiguration (both software and hardware modules). In this case, an approach is presented for reconfiguration of horizontal shaper machine for developing the modular shaper cum slotter machine in a manufacturing system by adding some auxiliary (like Scott Russel mechanism) and some basic modules and the reconfiguration features of traditional shaper and slotter machine are also discussed. The proposed approach is illustrated with a figure, which has been designed on 3-D design tool (solid-works software platform). It is expected that, this work will help designers and practising engineers by making them aware of the reconfiguration mechanisms on traditional shaper machine, which have become a necessity for the very survival of manufacturing by lowering the operational costs.
Keywords
Introduction
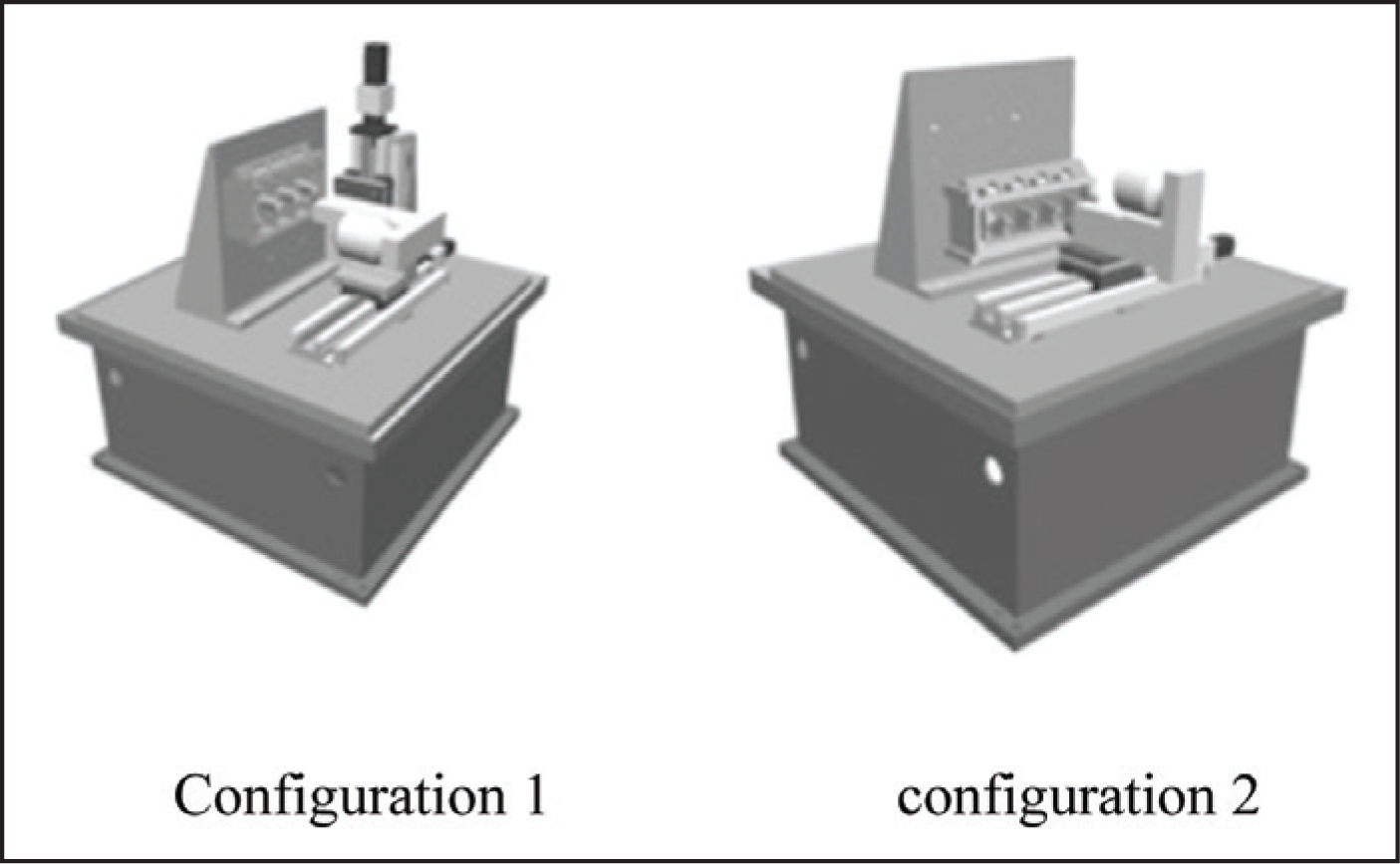
In today’s global and unpredictable environment, the company wants to bring a system in which one can make changes anytime, whether it is at the machine level or at design level (National Research Council, 2002). Customer demands are changing day by day and they want products at a cheap price, which is a major problem faced by companies in today’s competitive environment (Asjad, Kulkarni, & Gandhi, 2013). This has also drawn attention of the government and the government is pressing hard to the entire manufacturing sector to evolve suitable changes in the manufacturing practices so that the cost of the product are decreased (Hees, Schutte, & Reinhart, 2017). So the company is paying a lot of attention to the field of reconfiguration at the machine tool, material handling, machine controller, machine hardware and software and layout level. Therefore, necessitates adopting those system in which can make changes at different level very easily and quickly. This type of system is called reconfigurable manufacturing system (RMS). RMS plays a very important role in meeting the changing needs of the customer and keeping the manufacturing sector firmly in the uncertainty phase of market. In this system, the reconfigurable machine tool (RMT) works like its heart, because if the design of the product is changing repeatedly in a very short time, the company does not want to buy a new machine to solve this problem. The customer will take a reconfigurable machine (such as shaper, planer, milling, lathe, drilling and Computer Numerical Control [CNC]) in which they can change its structure by their own choice by adding some auxiliary modules or basic modules that make it easier to integrate new technologies, cost-effective and provide high-speed capability (Moon, 2006; Saad, 2003). The machine configuration shown in Figure 1 illustrates the concept of reconfiguration in RMT and is self-explanatory. In this paradigm, Yoman Koren was the first who had thought about RMS in 1999 which is based on six core characteristics known as scalability, modularity, integrability, flexibility, modularity and diagnosability (Bi, Sherman, Lang, Verner, & Orban, 2008; Koren, Gu, & Guo, 2017; Koren et al., 1999; Koren & Shpitalni, 2009; Mehrabi, Ulsoy, & Koren, 2000; Singh, Gupta, Asjad, & Gupta, 2017; Zhong & Zheng, 2012). There can be many ways to make any traditional machine to a reconfigurable machine. Either we change the part of the machine or we use the modular parts in the machine in which we could easily make changes as per requirements. There has been a lot of research done in this direction, where many principles related to converting the traditional machine to a reconfigurable machine are reported. Hincapie, Guemes, Contero, Ramire, and Diaz (2016) emphasized on software reconfiguration for the creation of a new knowledge database and worked with it in the reconfiguration of machine tools in RMS. M. Jurković and Jurković (2008) discussed intelligent machining system, reconfigurable machine, machine tools, etc. They offered their work in this field and proposed a Stewart mechanism in a parallel kinematic machine which can be used to increase the convertibility and flexibility of the machine. Jurković and Karabegović (2000) had highlighted on artificial intelligence and computational intelligence in machine software. These factors lead to adopt necessary changes in the manufacturing operation so that flexibility, convertibility and reconfigurability could be imbibed in any machines by using appropriate mechanism, which is very important in today time of fierce competition.
This case reports the reconfiguration of a horizontal shaper machine to produce both shaper and slotter operation. The shaper machine has two motions known as forward motion and back ward motion. Forward motion is cutting motion and backward motion is unproductive as it does not perform any cutting operation. In this case, I want to propose a hybrid machine using the back-stroke motion of the shaper machine. The second section briefly reviews the efforts of the researchers on different machine tools for converting them into reconfigurable machines. In the third and fourth sections, reconfiguration mechanisms in two different machine tools are discussed and finally, the fifth section concludes the case and highlights the limitations of the study.
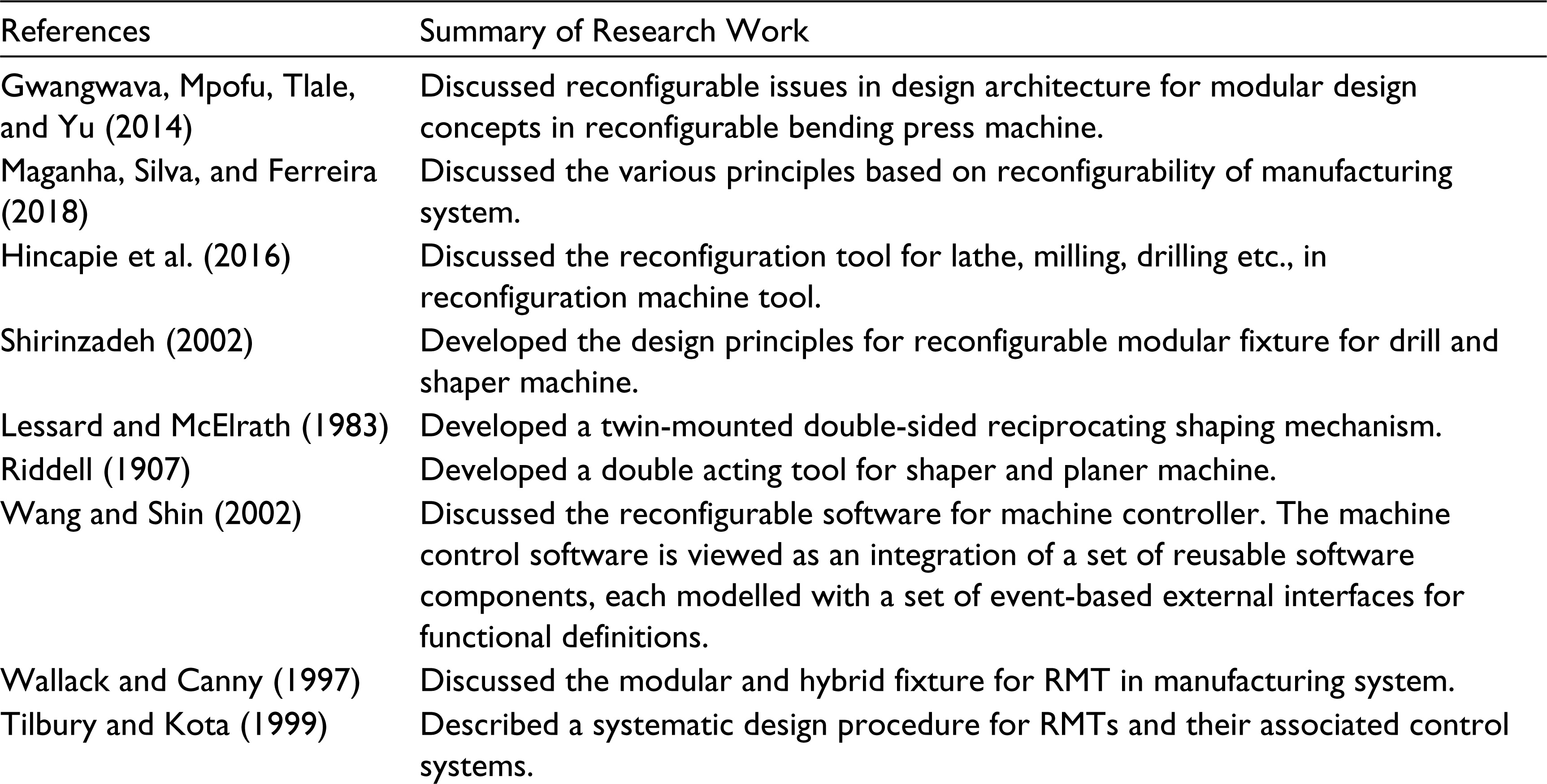
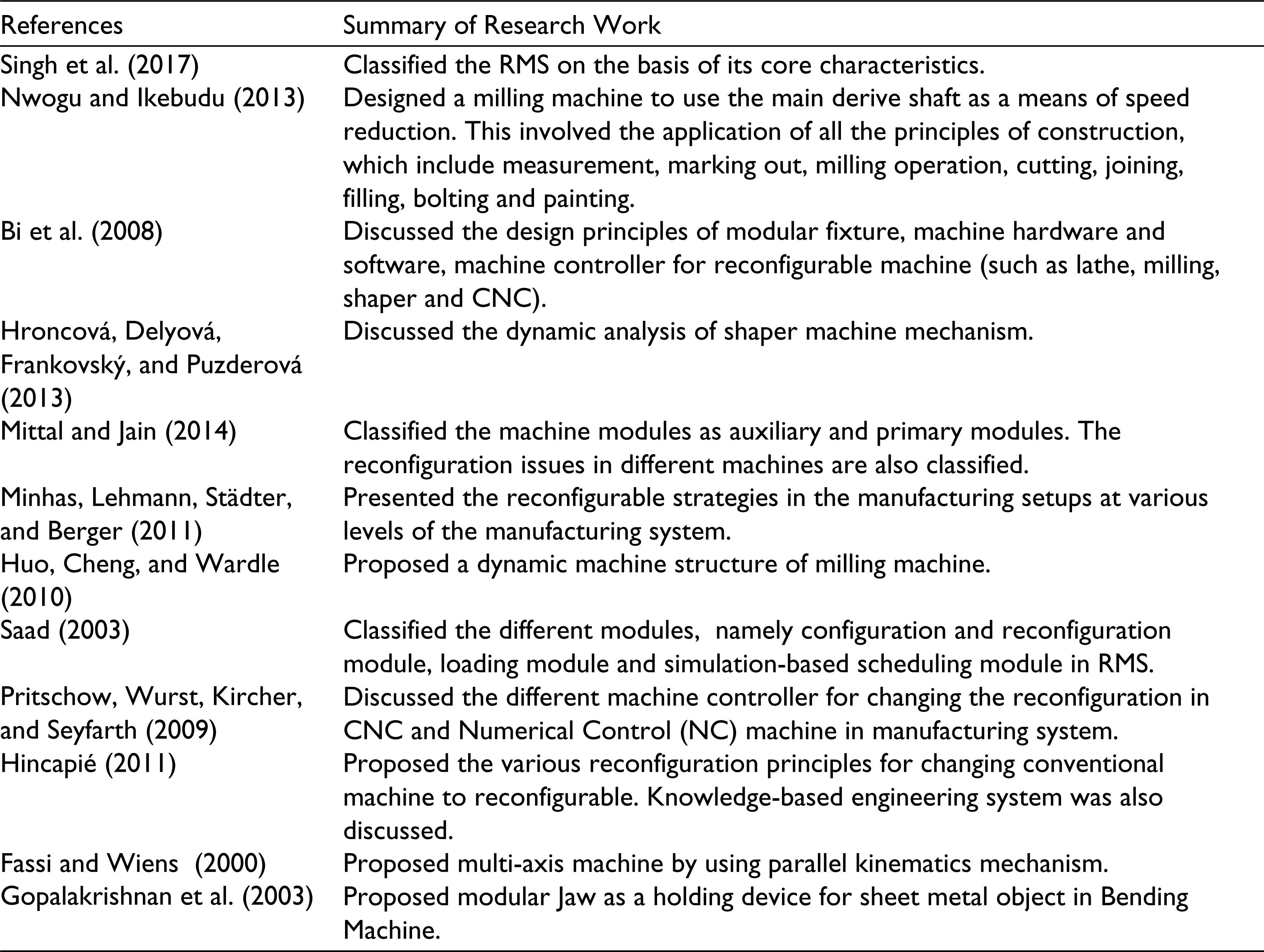
Research Works Carried Out for Developing RMTs: Characteristics and General Principles
Literature Review: Shaper Machine and Its Components
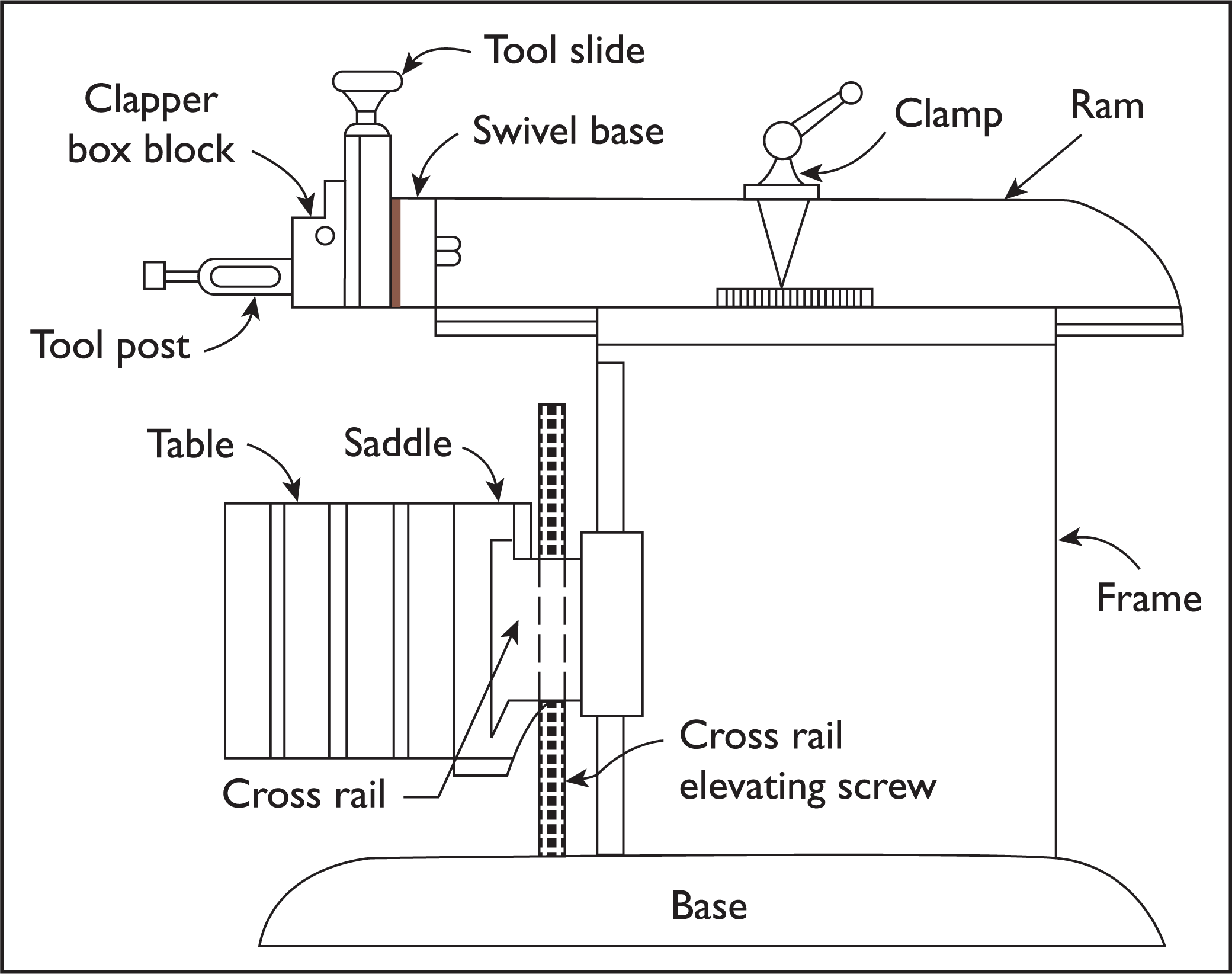
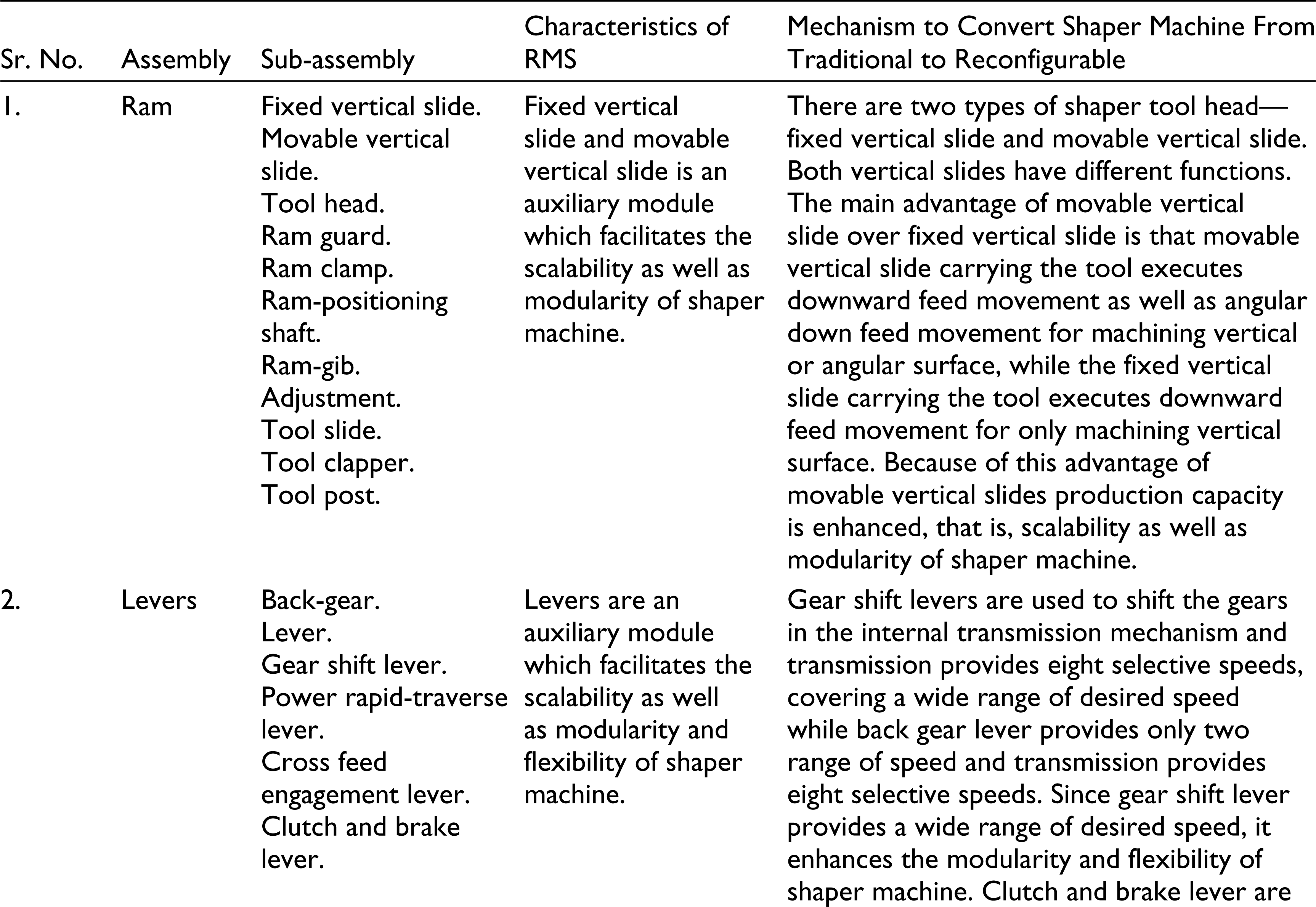
A shaper machine is a machine tool which is used to remove material from the work piece in horizontal, vertical and angular surface by the use of a single-point cutting tool which is held in a ram that reciprocates the tool in a linear direction across the machining surface of work piece material (Table 1). The work is fed at 90 degrees to the direction of the ram in small distance at the end of return stokes. It performs various metal removing operations such as dove tail grove, V block, tongue and groove joint, external and internal key ways, T slot, concave surface, deep slot, etc. with the help of a single-point cutting tool. This machine consists of different sub-assemblies/components shown in Figure 2 and detailed in Table 2.
Sub-assemblies/Components of a Shaper Machine

Slotter Machine
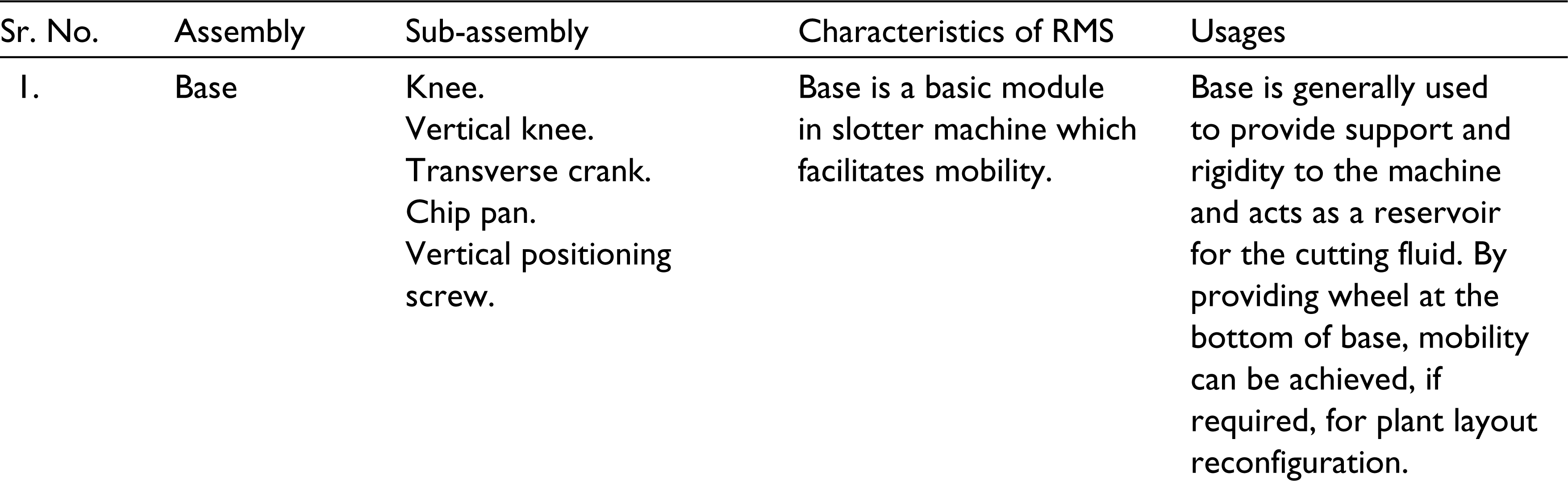
Vertical shaper and slotter are identical to the horizontal shaper except that the ram reciprocates in a vertical direction, cutting on the downward stroke, but the upward stroke (return stroke) remains ideal. Even though there is a distinct difference between vertical shaper and vertical slotter, both the machines are generally formed interchangeably by the personal working in shop floor (Table 3). The slotter machine has only the vertical direction line movement. A slotter is however a more robust machine than a vertical shaper machine. This machine consists of different sub-assemblies/components as shown in Figure 3 and detailed in Table 4. Slotting machines are generally used for low productivity, instead of general production, for piece production required for repair and maintenance.
Characteristics of a Traditional and Reconfigurable Shaper Machine


Sub-assemblies/Components of a Slotter Machine

Mechanism to Convert Traditional Shaper Machine to Slotter Machine
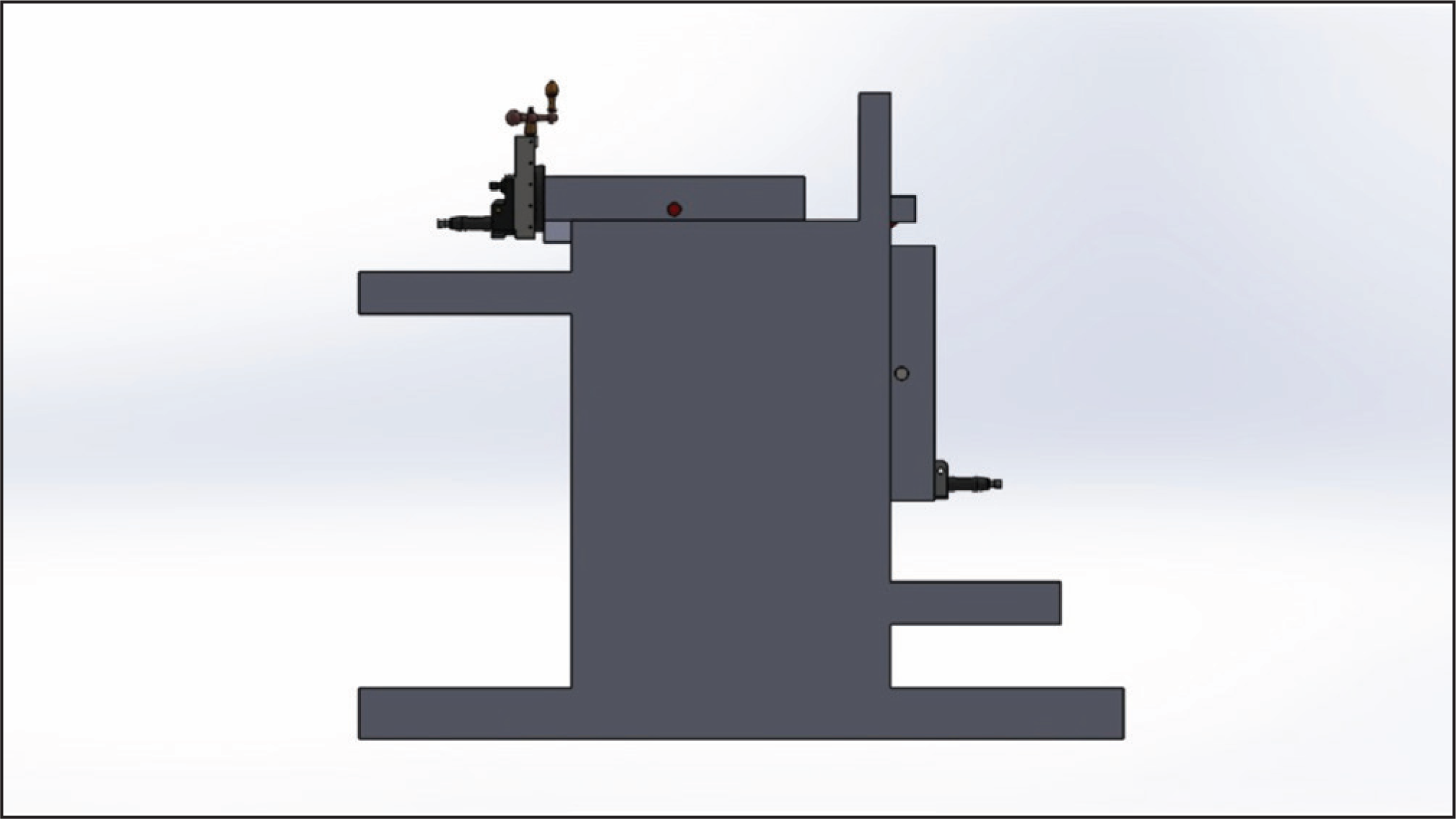
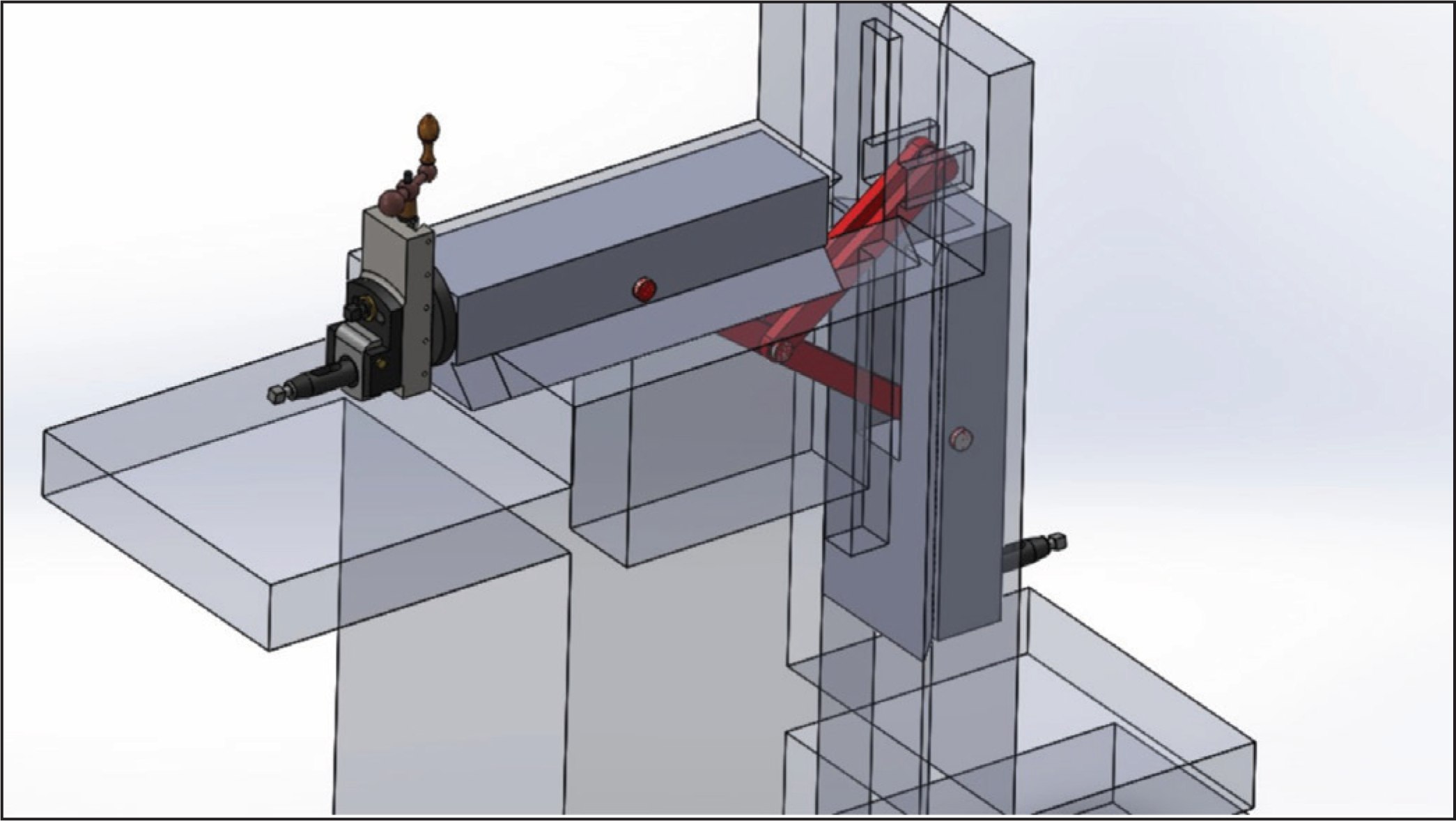
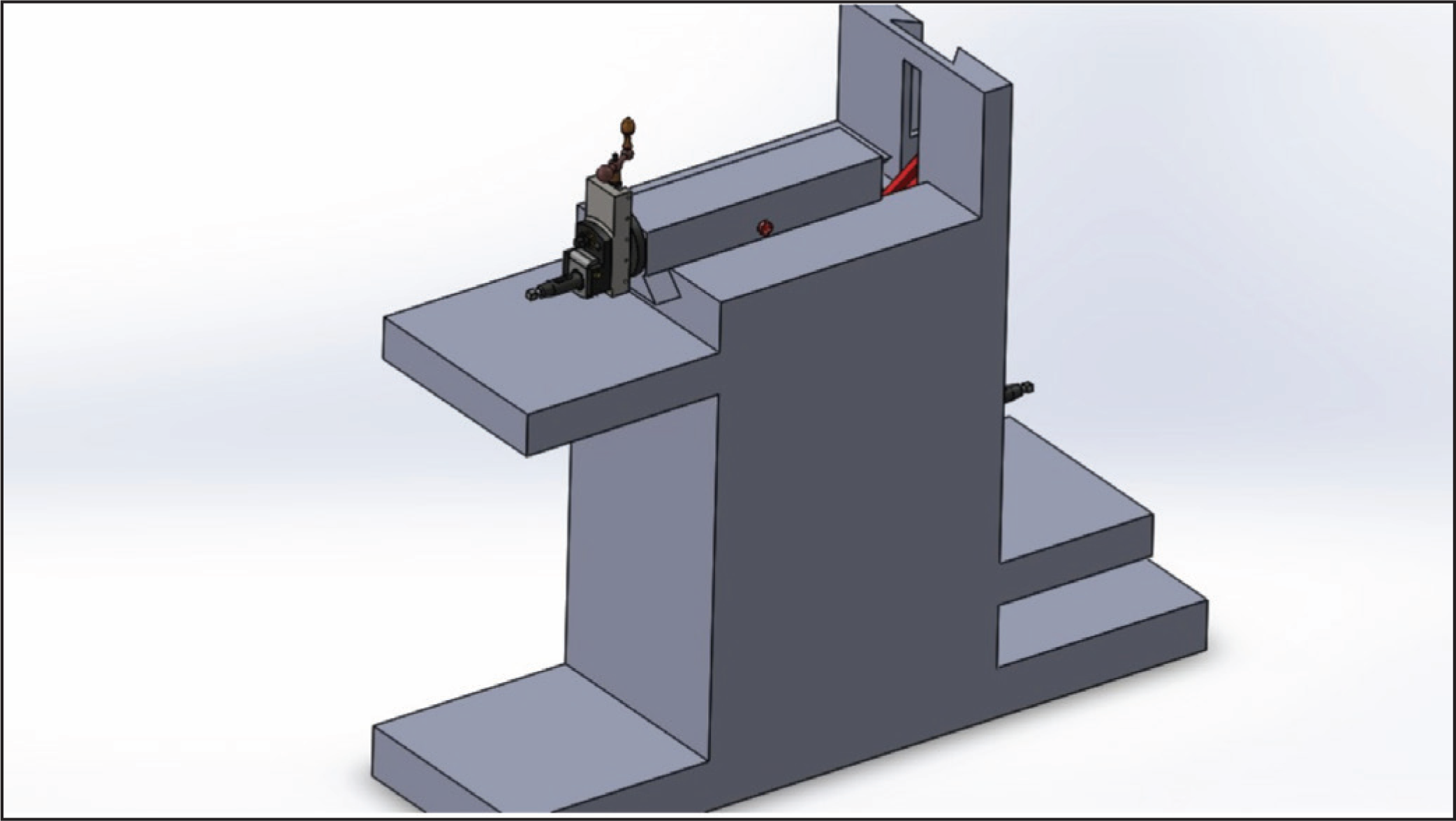
The principal aim of RMT is to enhance the reconfigurable capabilities of different machines such as lathe, milling and drilling machines. in RMS. In shaper machine, tool slide, clamp, cross rail, tool post, clapper, swivel base, crank slotted mechanism are the auxiliary modules and base, frame, table, saddle etc (Table 5). are the basic modules. Pattanaik, Jain, and Mehta (2007) classified the different auxiliary modules and basic modules of different machines such as milling and drilling machine. Horizontal shaper machine is used for removal of material in a horizontal direction by using a single-point cutting tool which is mounted on the tool post. Ram is attached on the column. By using quick return motion mechanism, shaper machine operation is performed. There are two strokes in this machine, known as cutting strokes and return strokes (ideal stroke). Cutting operation performs only in forward stroke or cuttings stoke but in case of return stroke, no cutting action takes place. Therefore, this needs to adopt to auxiliary modules like Scott Russel Straight Line Mechanism, Parallel Kinematic Mechanism etc. (Fassi & Wiens, 2000), which could convert ideal stroke motion for cutting purpose and thereby enhancing convertibility, scalability and modularity of this machine. In this paper, we proposed a machine, which will perform both shaper and slotter operations simulatenously. This arrangement may also increase flexibility, scalability of shaper machine. We will attach this auxiliary module at the one end of ram while the other end is connected with the tool post for shaper operation. When the ram moves in backward stroke, the Scott Russel mechanism converts the horizontal motion of ram into vertical downward motion for slotter operation. This module will convert the linear motion of ram (in ideal stroke or non-cutting stroke) into vertical movement for slotter operation. In this way, a traditional shaper machine is converted into a shaper cum slotter machine. Therefore we proposed a mechanism for designing of modular reconfigurable shaper cum slotter machine tool. We have designed this modular machine (shaper cum slotter machine) on 3-D design software, that is, on solid work. This design is shown in Figures 4–6. The schematic diagram of the Scott Russel mechanism tool used in this research work is presented in Figure 5. By using this mechanism, we enhanced the capacity and functionality of the traditional shaper machine and thereby increased the reconfigurability of the RMT. It is expected that, this work will help designers and practising engineers by making them aware of the reconfiguration mechanisms of a shaper machine, which has become a necessity for the very survival of the manufacturing by lowering the operational costs.
Characteristics of a Traditional and Reconfigurable Slotter Machine

Conclusion
This case highlighted some features of traditional and RMT, such as shaper machine and slotter machine. The literature identified reconfiguration at the machine hardware level, software level as well as at the tools level that are applicable in the field of reconfiguration manufacturing system. Reconfigurable Machine Tool (RMT) is capable of increasing convertibility, modularity, scalability, flexibility through reconfiguration in order to increase productivity and cost reduction. In this context, we have proposed the reconfiguration features in traditional shaper machine to convert its horizontal motion to vertical motion by using some auxiliary module such as Scott Russel mechanism. By doing this, we can enhance the convertibility, modularity and flexibility of RMT. The proposed design of this reconfigurable machine has been developed into design software using solid works. A limitation of this work is that it is confined to the reconfiguration of machine tools such as lathes, milling and drilling machines (Singh et al., 2017). However, reconfiguration can be done on other fields such as material handling, plant layout in RMS. Further research work is ongoing to incorporate inclined shaper operation and measurement of the forces acting during the process.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship and/or publication of this case.
Funding
The authors received no financial support for the research, authorship and/or publication of this case.