
Abstract
Syntactic types are defined as sets of designs with particular properties. We are specifically interested in the definition of deformed grids, a particular type of street network internal to superblocks. The superblocks under study are surrounded by arterial streets and have traversing local main streets and internal street infills. The argument takes advantage of three kinds of rules or algorithms: generative rules that produce a universe of designs, analytical algorithms that can be applied to the description of properties of interest for each member of the universe, and query or sorting rules that allow us to identify those members of the universe that have particular ranges and combinations of properties of interest. The iterative application of analytical and sorting algorithms assists the transition from an intuitive to formalized definitions of type.
In mathematics, as in any scientific research, we find two tendencies present. On the one hand, the tendency towards abstraction seeks to crystallize the logical relations inherent in the maze of material that is being studied, and to correlate the material in a systematic and orderly manner. On the other hand, the tendency toward intuitive understanding fosters a more immediate grasp of the objects one studies, a live rapport with them, so to speak, which stresses the concrete meaning of their relations.—Hilbert and Cohn-Vossen (1990).
Introduction: Intuition and formalization in urban spatial syntax
In the field of space syntax, we often observe a creative tension between formalization and intuition. For example, the analysis of closeness centrality or integration, applied to line maps, leaves no room for any ambiguity. All assumptions and all computational algorithms have been made explicit in the literature (Batty and Rana, 2004; Hillier et al., 1987; Hillier and Hanson, 1984; Peponis et al., 2008, 1998; Turner, 2007; Turner et al., 2005). At the same time, our understanding that the distribution and collective shape of the most integrated streets provides a strong foundation for development of a syntactic typology of settlements and cities has remained largely intuitive. In the article that first introduced urban space syntax (Hillier et al., 1983), the term integration core denotes the spaces with integration value at the 90% percentile. A distinction is drawn between: first, integration cores that get to all the parts of an urban area, encompass segments of its perimeter, and look like deformed “wheels”; second, integration cores that traverse the entire area and branch out like “trees” but without reaching all the parts; third, integration cores that are like “hubs tightly wrapped in the central part of an area”; and, fourth, integration cores that encompass peripheral spaces only, thus appearing like “rims,” without penetrating toward the middle of the area. With the exception of a paper (Peponis et al., 1989) that proposed measures of how well an integration core reaches all the parts of a system and how much the integration values of core spaces differ from others, there have been no attempts to formalize the types of integration cores of settlements, cities, or urban areas.
This is hardly surprising. The interplay of formalization and intuition is intrinsic to any scientific field and, as Hilbert and Cohn-Vossen (1990: iii) remind us, is also germane to geometry and mathematics. There is, however, an additional reason why this interplay is significant in the context of space syntax. This has to do with the idea of “description retrieval.” As proposed by Hillier and Hanson (1984), description retrieval refers to the recognition and representation of the complex syntactic properties that systematically emerge as relatively simple generative rules giving rise to settlement layouts over time. Once the resulting properties are recognized, the generative rules can be modified so as to produce desired morphologies (Hillier, 1985).
The development of syntactic typologies has not received as much explicit attention as the study of underlying laws such as the relationship between integration and the distribution of pedestrian movement (Hillier et al., 1987, 1993; Özbil et al., 2011; Peponis et al., 1989; Read, 1999). In this paper, we engage three kinds of algorithms in order to discriminate between syntactic types. First, generative algorithms that produce a universe of designs, a “design space.” Second, algorithms for the analysis of all the members of the design universe according to particular syntactic relationships. Third, algorithms for querying the analyzed universe of designs in order to retrieve designs with particular characteristics. Intuitive ideas are explored using iteratively revised analytical and query algorithms to discriminate between the members of the design universe and to arrive at a formal definition of type.
The particular question we start with is the interface of local and global syntactic structure in superblock patterns. We use the term “superblock” to refer to an urban area surrounded by major streets or arteries. When superblocks are sufficiently large, say squares with a side of 400–800 m, the internal street network can sometimes be organized in ways analogous to the structure of traditional towns (Peponis et al., 2015). In the particular case of Gangnam, Seoul, we have identified a “three level” pattern (Peponis et al., 2017, 2016): Arterials, at the edge of the individual superblock, act as global integrators at the scale of the city as a whole. Local integrated main streets traverse the block in one or both directions. Infill local streets conform to the intuitive idea of a “deformed grid”: Some streets are longer, some are more sinuous, some are easier to get to, and some more secluded. However, overall connectivity remains strong. There are no areas of isolation. Cul-de-sacs, if present, are the exception.
A heuristic diagrammatic distinction between three kinds of street networks is proposed in Figure 1. In regular networks all local streets traverse the superblock in one direction or the other, and there is no clear difference between a local main street and other streets, except perhaps by street width. In polarized grids most separate branches or disjoined enclaves or loops are attached to the main streets. Deformed grids are the interesting third case for which we will seek clear formal definition. Actual examples of superblocks that approximate these diagrammatic types are also shown.
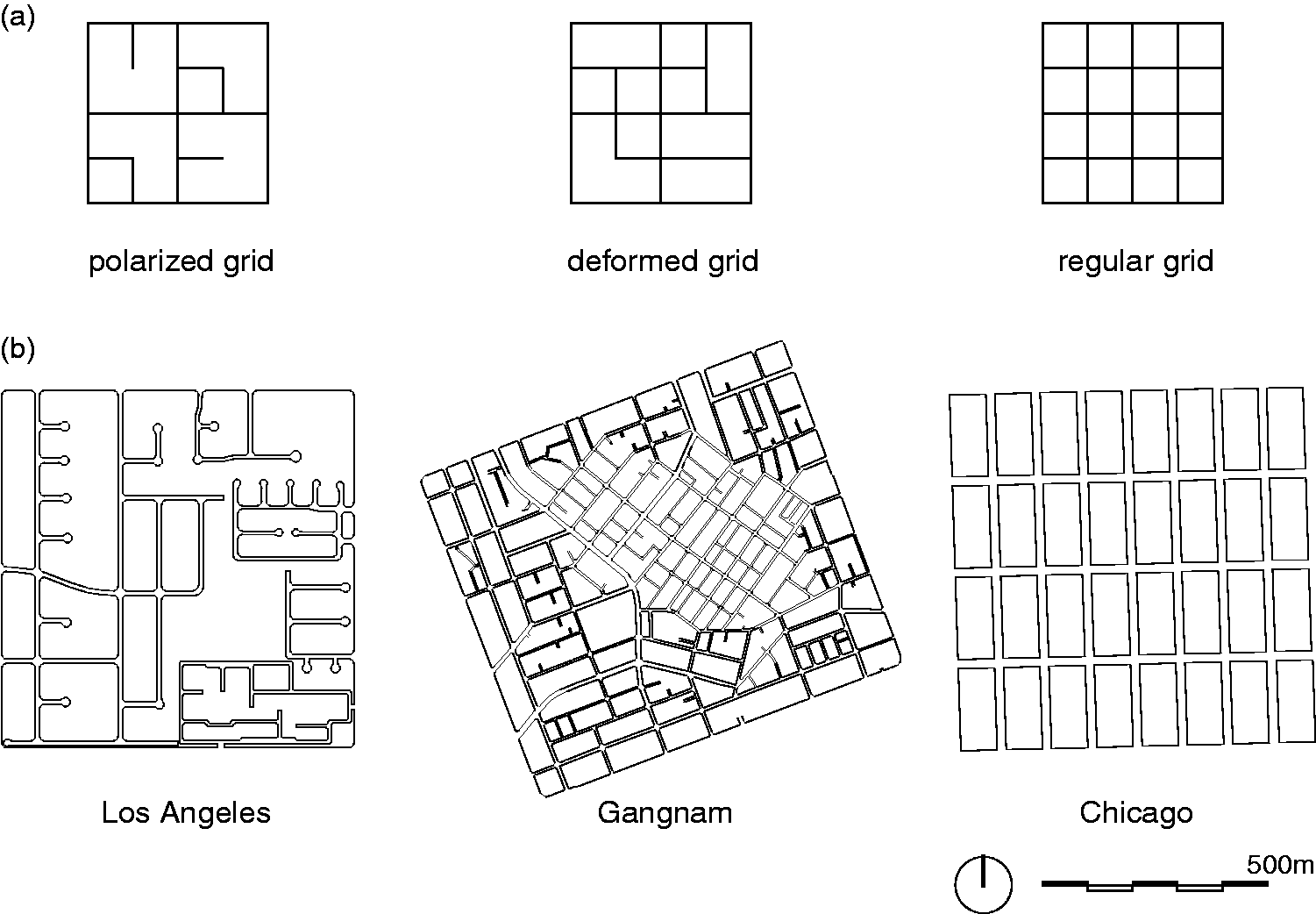
A schematic classification of superblocks: polarized, deformed, and regular grids. (a) Abstract diagrams and (b) actual examples.
The next section describes the creation of a design universe, as a basis for a systematic study of the properties that might be used to arrive at a rigorous definition of the “deformed grid” in superblocks with traversing local main streets.
The creation of a “design space”
The minimum schematic expression of a superblock with local traversing main streets is a 3 × 3 street grid with four internal blocks. The minimum schematic expression of a superblock with additional internal streets is a 5 × 5 street grid with 16 internal blocks. This allows that at least one local street runs between the local main streets and the arteries at the edge.
A simple rule is used to generate a universe of designs. We start from a 3 × 3 grid, with a 200 m interval from street centerline to street centerline. We then insert perpendicular street segments of 100 m at the midpoint of any of the original street segments, until a 5 × 5 grid with a 100 m interval from street centerline to street centerline is obtained. Alternatively, we may start from a 5 × 5 street grid with a 100 m interval, and allow that street segments be eliminated, one at a time, in all nonequivalent combinations, until a 3 × 3 street grid with a 200 m interval is obtained. Dimensions could freely be changed. The equivalent generative principles are expressed in the language of shape grammar substitution rules in Figure 2. The maximum number of times either rule can be applied is 16. The minimum number of times is zero. All possible iterations in the application of one of the rules between 0 and 16 times are valid. Below, we proceed on the basis of the additive rule.
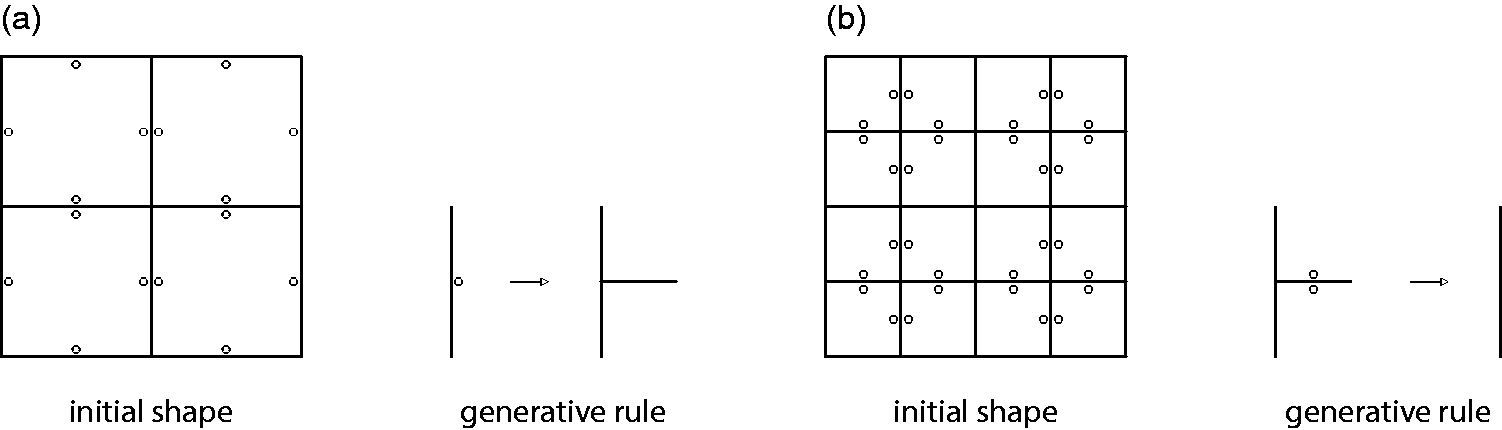
Initial shapes and generative rules. (a) Additive and (b) subtractive.
The application of the rule gives 8356 different designs, including the initial shape. The total number of possible designs, as well as the number of possible designs for a given number of applications of the rule is estimated by applying Pólya’s enumeration theorem (Harris et al., 2008; Pólya and Read, 1987). The theorem is applied after interpreting the designs as coloring schemes on a triangular canvas, where each of the triangles can be white or black, as shown in Figure 3(a). Given a set N of 16 triangles, two colors, black and white, and the permutation group G shown in Figure 3(b), the problem is to find the number of nonequivalent colorings of N.
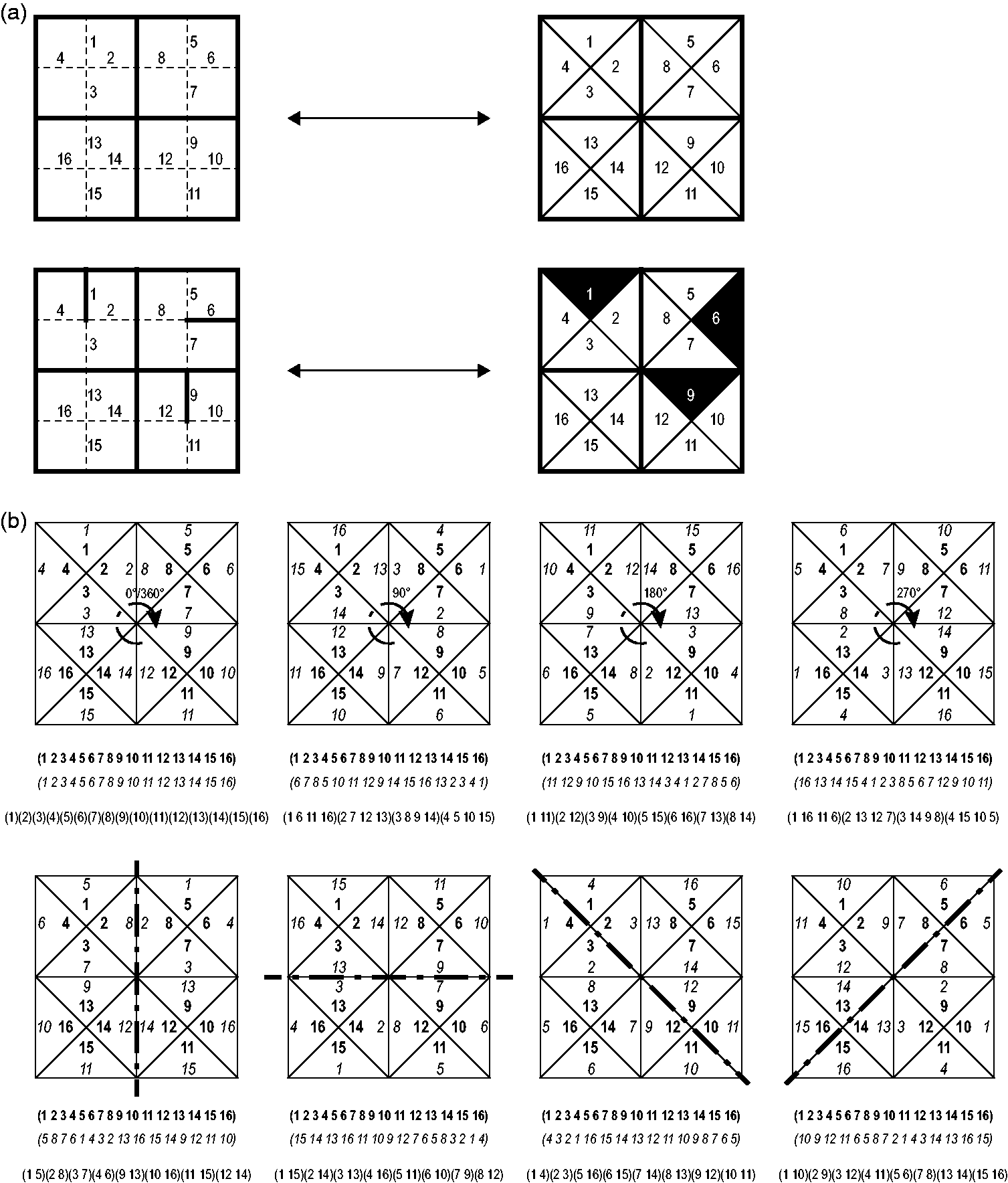
The design universe interpreted as permutations of black and white colorings applied to an underlying canvas of triangles. (a) A black triangle indicates an added line segment and (b) permutation group of the underlying canvas.
Expressed as products of cycles, the permutations of the symmetry group described in Figure 3(b), are

The cycle index of the permutation group is

Substituting

We used the function “OrbitRepresentatives” of the “Combinatorica” package in Wolfram Mathematica 11.2 to write the 8356 strings of 16 characters with the letters “W” and “B” placed in different positions, to represent different designs. Then we developed a Python script to translate the strings into drawings.
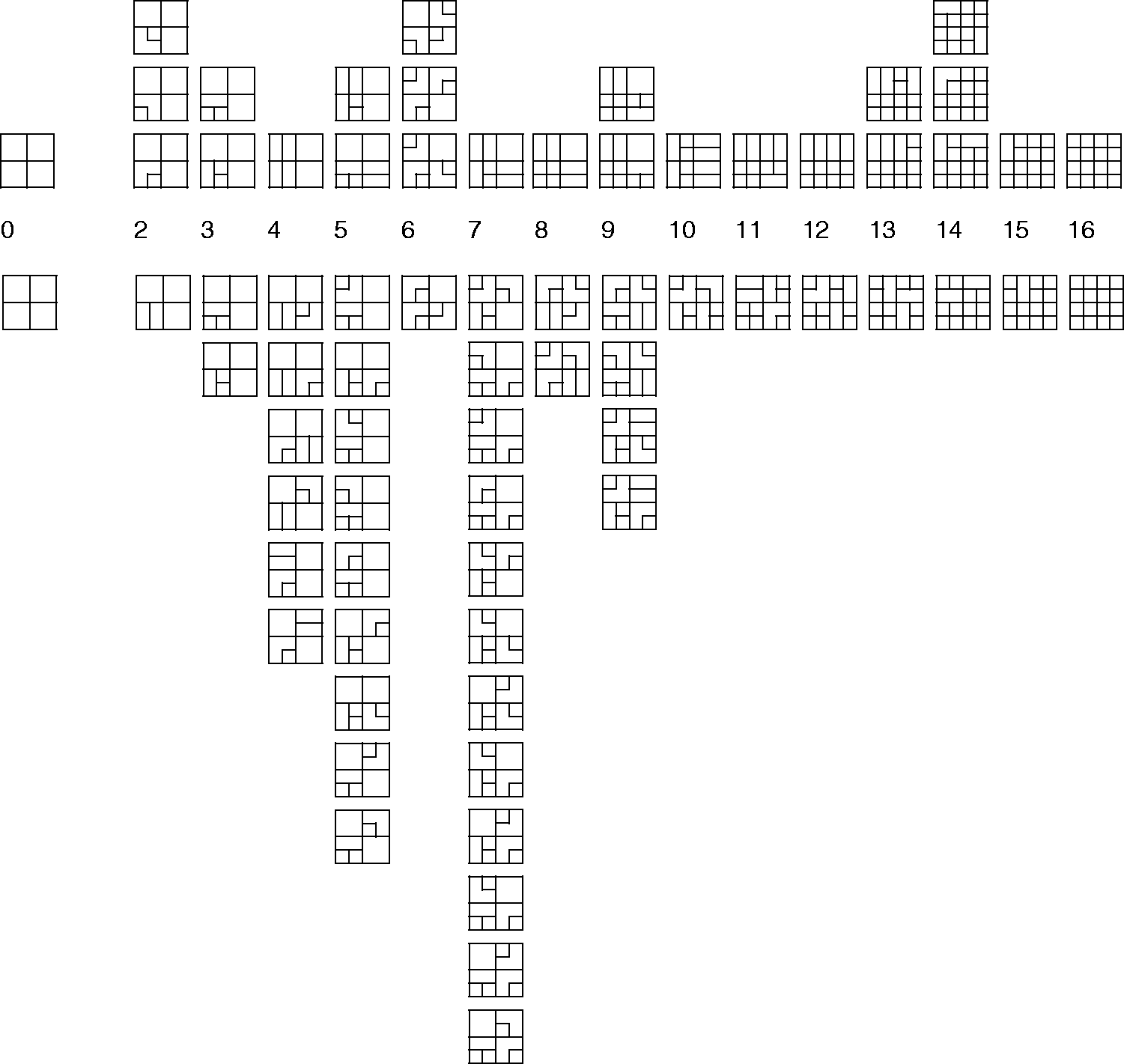
As we are interested in providing a definition of “deformed grids,” we eliminated designs including a cul-de-sac, since cul-de-sacs are not consistent with the intuitive idea of a street grid. This limits the universe to 2697 designs. Some are shown in Figure 4, arranged according to the number of times the generative rule is applied.

A sample of the universe of 2697 designs without cul-de-sacs. Designs are arranged according to the number of line segments added to the initial shape.
Designs described by the distribution of directional distance values
For each design, we computed the directional distance from each line segment to all the others (Peponis et al., 2008). In the universe of designs under consideration, all direction changes are 90° and thus the analysis is not sensitive to the choice of a threshold angle for a direction change. In the rest of this paper, we will refer to street segments with low directional distances from the rest of the system as being “integrated,” following standard space syntax language.
Directional distance is a fundamental configurational measure. The term “configuration” refers to the way in which relations take into account other relations (Hillier, 1996; Peponis et al., 2015). Put simply, the addition of one street segment affects the directional distances that describe other street segments. This is shown in Figure 5. In the 3 × 3 grid, all line segments have a linear extension of 400 m and all have a mean directional distance of 1.167 from the rest of the network (Figure 5(a)). When one additional street segment is added, all but one line segments have a linear extension of 400 m and exactly one has a linear extension of 100 m. However, we find four different directional distance values in the system as a consequence of the addition of the new segment (Figure 5(b)). When three segments are added, in the particular configuration shown, we find seven different directional distance values (Figure 5(c)). Thus, directional distance values express the configurational structure of the system.
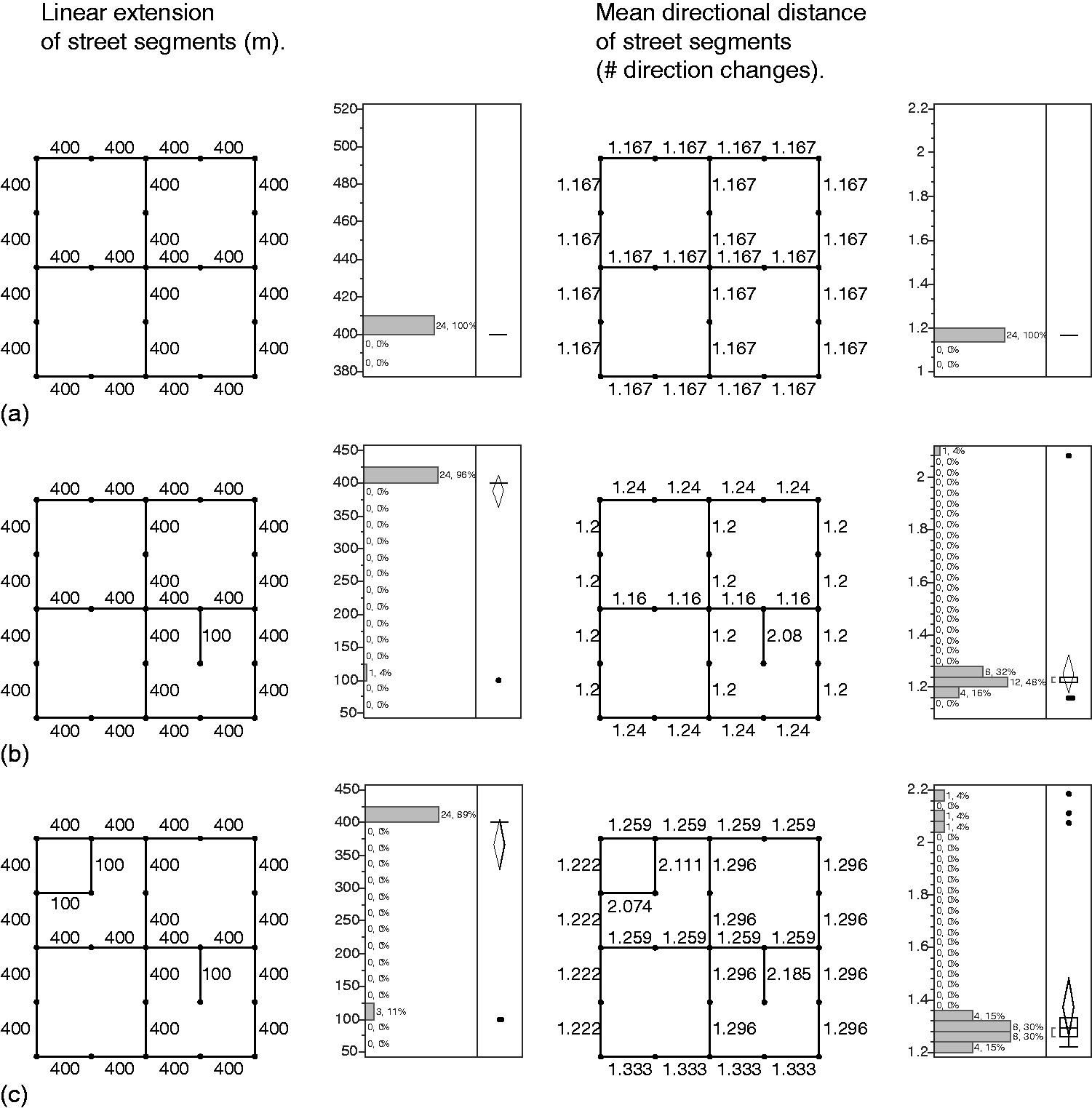
Distribution of values of linear reach and directional distance for three designs.
Syntactic equivalence classes
We found sets of designs with the same number of street segments and the exact same values for the linear extensions of streets (which is obtained as the zero direction changes reach from any of the line segments that make up a street), and for directional distances. These designs are, therefore, undistinguishable according to two fundamental syntactic measures. And yet, they are different shapes that cannot be superimposed to coincide with one another by means of a symmetry operation. We propose to call such sets of designs syntactic equivalence classes. Examples of syntactic equivalence classes relative to linear extension and directional distance are provided in Figure 6.
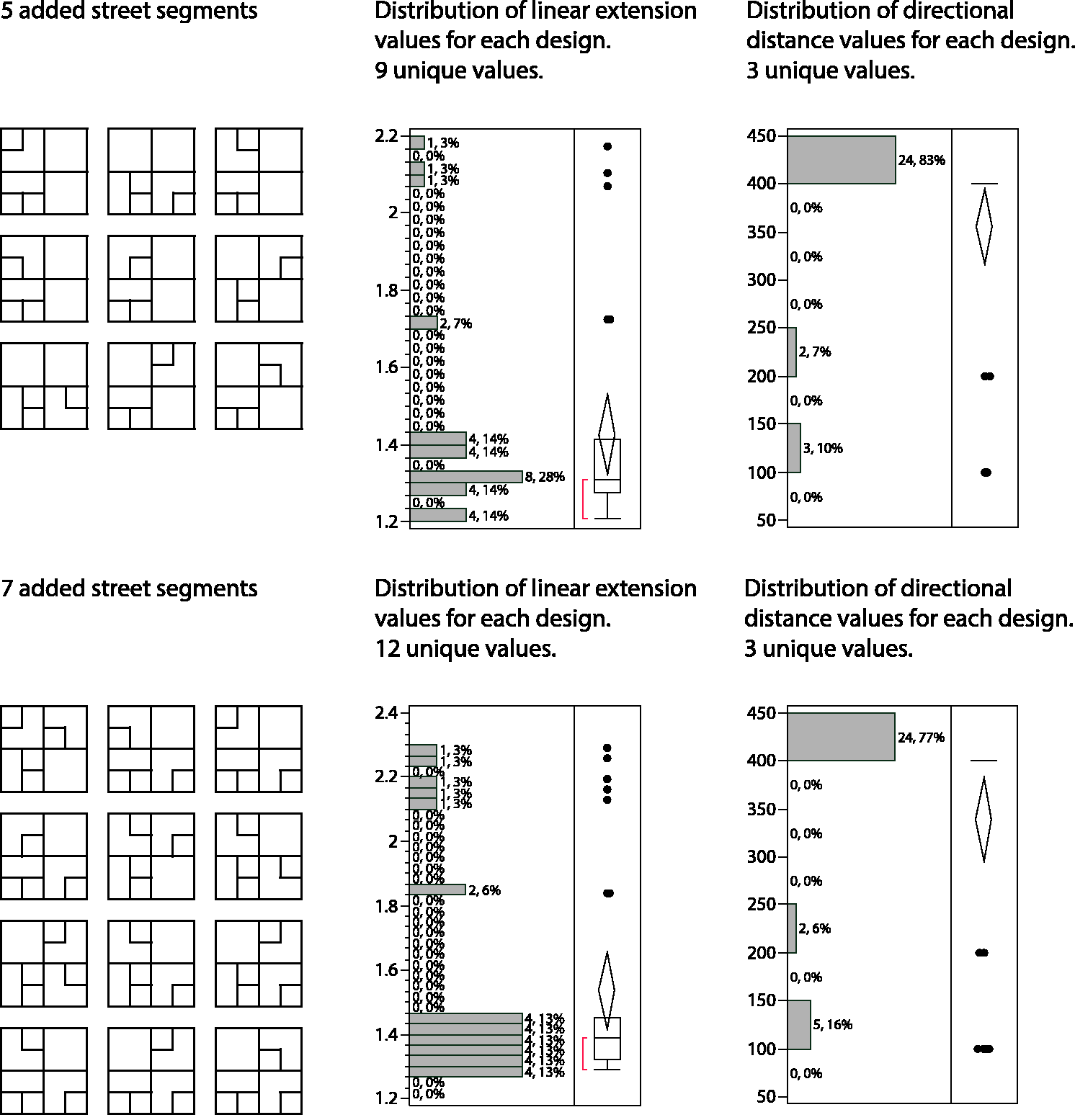
Two examples of syntactic equivalence classes with 9 and 12 members, respectively.
We developed algorithms for searching the universe of 2697 designs for the presence of equivalence classes. We first sorted designs according to the number of values for each of the syntactic measures of interest; we subsequently tested whether the ranked sets of values matched. As a result, we know that the universe of 2697 designs can be reduced to 1335 equivalence classes relative to street line length and street segment directional distance.
Are deformed grids defined by the differentiation of directional distances?
The definition of syntactic equivalence classes is precise at the cost of also being restrictive. By contrast, the idea of type is more inclusive. The invariant properties that define type also allow for a variety of individual designs. For example, the designs that belong to an equivalence class all have the same number of constituent elements, in this case line segments, while the designs that belong to a specific type might have different numbers of elements. We now proceed with the examination of the idea of the deformed grid as a syntactic type. We first examine whether deformed grids can be defined in terms of the differentiation of the directional distance values of a design.
The universe of designs is organized into sets by size, according to the number of times the generative rule was applied. A query algorithm was developed to identify, for each size set, the designs that exhibit the least and the greatest number of directional distance values. Where two designs exhibit the same number of values, the one with the highest variance was chosen. The results are shown in Figure 7. The designs with the least and greatest differentiation or values are arranged in the upper and the lower part of the figure, respectively, in the order of size.
Designs with the least and most differentiated directional distance values arranged by size in the upper and lower part of the figure, respectively. In the case of size 3, only two designs are possible, and these are shown on both parts of the figure.
Upon inspection, the designs with the greatest number of directional distance values match better to the intuitive idea of “polarized grids” than to the intuitive idea of “deformed grids.” Thus, the differentiation of directional distance values cannot be used as an adequate or sufficient criterion for defining deformed grids. In the next section, we explore whether the presence of long local trails, which are absent in the lower part of Figure 7, should be treated as a defining characteristic of deformed grids, alongside the differentiation of directional distance values.
Continuous connectivity and the length of local trails
Querying the design universe to check the continuity of local street connections is necessary, given that the original simple rules do not specify whether new streets should extend existing streets or not. An analytical search algorithm was developed to identify, in each design, the longest available local trail that has no overlap with a main street or perimeter arteries, and no overlap with itself. The trails analyzed were allowed to cross the internal main streets. In order to develop the algorithm, we first had to clarify what we mean by an internal main street. In the original 3 × 3 grid, the internal main streets are 400 m long. Since street width has not been introduced as a variable so far, we have decided that any other 400 m long street that might be generated should also be treated as a main street. Thus, the longest local trails we looked for are those that encompass any portion of local streets whose length is 100, 200, or 300 m.
Our search algorithm for the longest local trail is applied on the subgraph that consists only of the local streets. Using graph notations, we can treat the original design as a planar embedding of the undirected graph G = (V, E) that consists of E, a set of edges—represented by the line segments—and V, a set of vertices—represented by the endpoints of the line segments. The graph G′ = (V′, E′) to which we apply the longest trail search algorithm is a subgraph induced by a subset E′ of the edge set of the original graph G, where
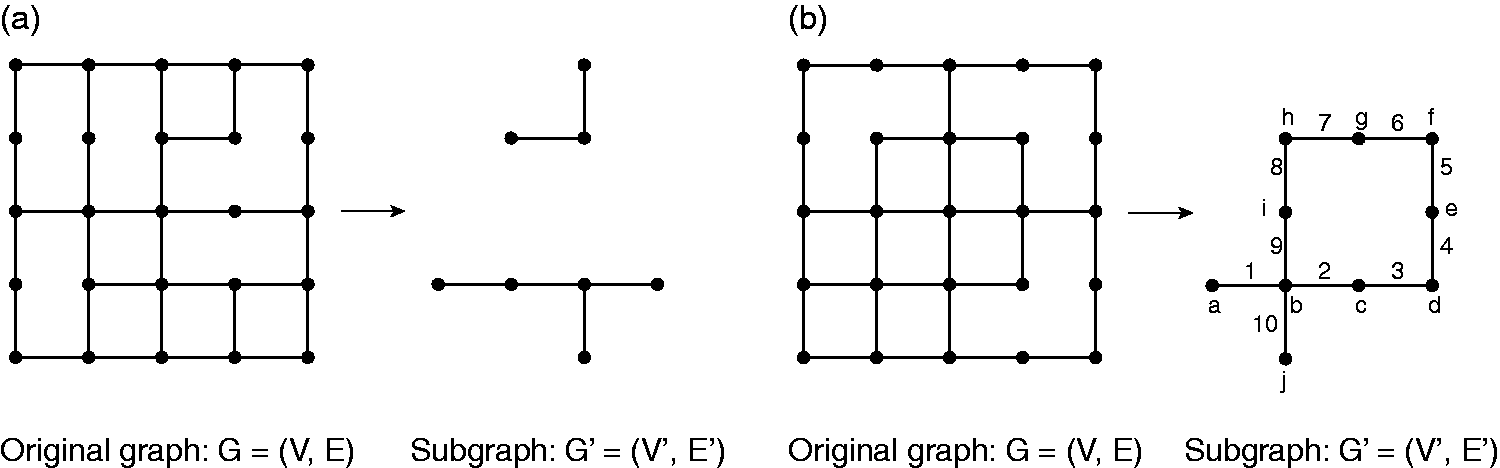
Local street networks. (a) Extraction of two tree-like local street networks and (b) extraction of local street network with a cycle.
Before we proceed, the distinction between a path and a trail is clarified, in conformity with the definitions given by Bondy and Murty (1976). A trail is a walk with distinct edges. A path is a walk with distinct vertices. A walk in G is a finite nonnull sequence
The problem at hand is finding the longest trail in the subgraph G′. We note that G′ can be a disconnected graph, as shown in Figure 8(a), and it can have a cycle in it, as shown in Figure 8(b). A cycle is a trail of nonzero length with a number of internal vertices, whose origin and termination are the same. The algorithm we used to find the longest trail in the undirected graph G′ checks each of its connected components, finds the longest trail in each component, and finally returns the longest among the longest trails found in all the connected components of G′. If the connected component of G′ is a tree, then the task of finding the longest trail in the component can be completed in two breadth-first searches (BFSs) (Cormen et al., 2009). The algorithm runs as follows: Step 1. Choose any vertex
Finding the exact longest trail in a connected component that has cycles cannot be easily solved in polynomial time. Since the graphs in our study have a small number of edges and vertices, we used a brute-force search algorithm to find and compare every possible trail in the connected component and return the longest trail among them.
A definition of deformed grids as a syntactic type
Having identified the longest trail for each design, we then proceeded to select, for each size set, the designs that have the longest local trail. Out of those, we further selected the designs with the highest number of directional distance values. The two variables are independent. We expressed the length of the longest trail as a proportion of the total length of internal streets added to the original 3 × 3 grid. We also expressed the number of directional distance values as a proportion of the total number of street segments included in the calculation. The association between these proportions is very weak (n = 2697, r2=0.052, F = 148.48, p < 0.0001). In selecting the designs with the longest local trails, we are not prejudicing the differentiation of directional distance values which has to be dealt with independently.
The set of designs thus selected are presented in Figure 9. On inspection, these match our intuitive idea of a deformed grid. We, therefore, advance the proposition that deformed grids can be rigorously defined as follows: First, they have long local trails. Second, they have a high differentiation of directional distance values.
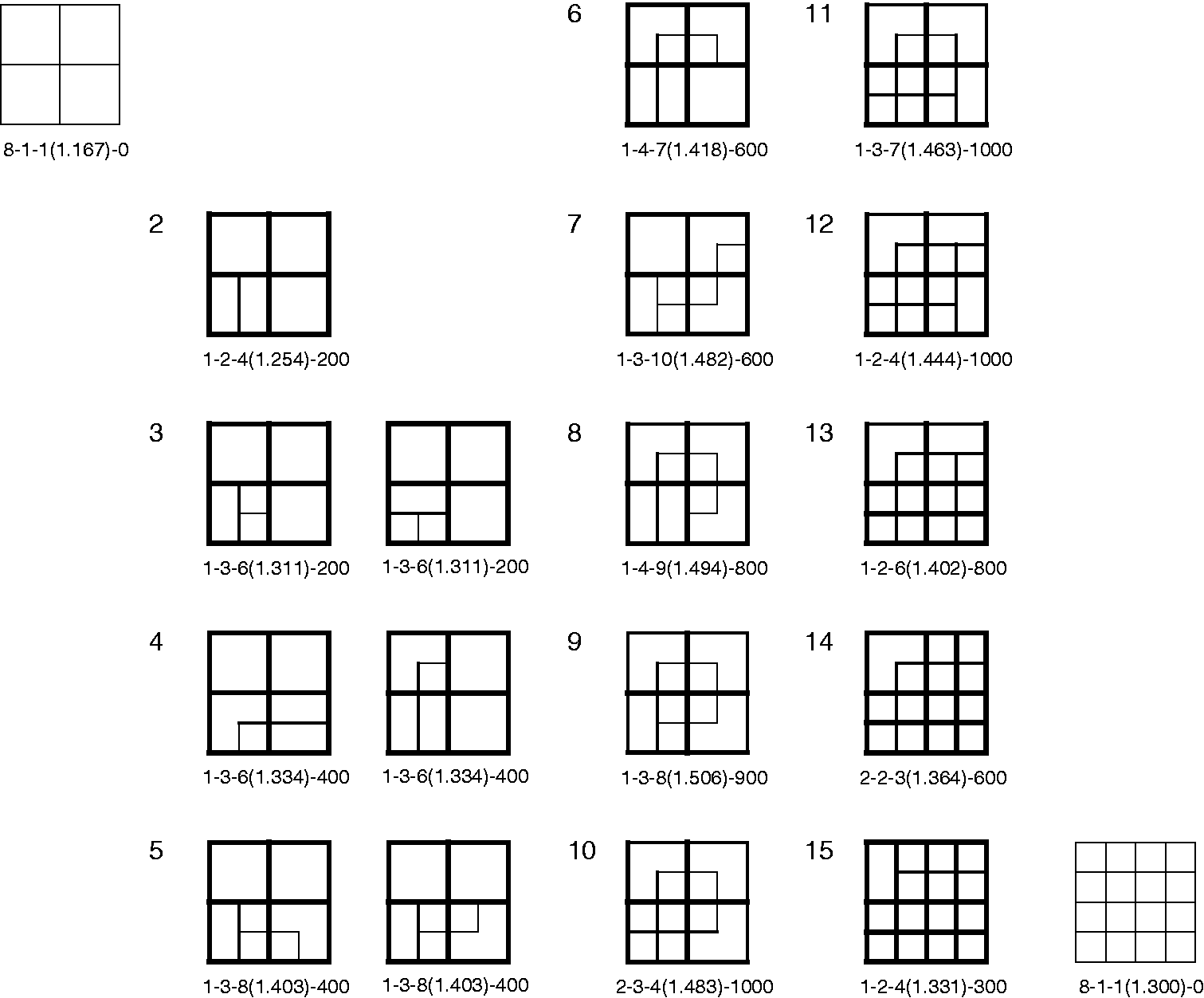
Designs with the longest local trails and the highest differentiation of directional distance values arranged according to the number of line segments added to the original shape. The string of numbers “a-b-c(d)-e” below each design specifies: a—the number of symmetries, b—the number of different street lengths, c—the number of unique directional distance values, d—the mean directional distance value, and e—the length of the longest local trail in meters. Thicker lines are more integrated.
The deformed grid designs presented in Figure 9 have integration cores that resemble “deformed wheels.” This is not surprising as the presence of two traversing internal streets was part of the initial 3 × 3 shape that was used to generate the design universe.
Continuity and linearity: A comment
Figure 10 presents a four-box cross-classification of designs with six, seven, or eight line segments added to the original shape, arranged according to whether they maximize or minimize the longest local trail, and whether they maximize or minimize the number of different directional distance values. Where multiple designs of the same size are shown together, they belong to an equivalence class. Thus, the figure presents 12 equivalence classes, eight of which have a single member only.
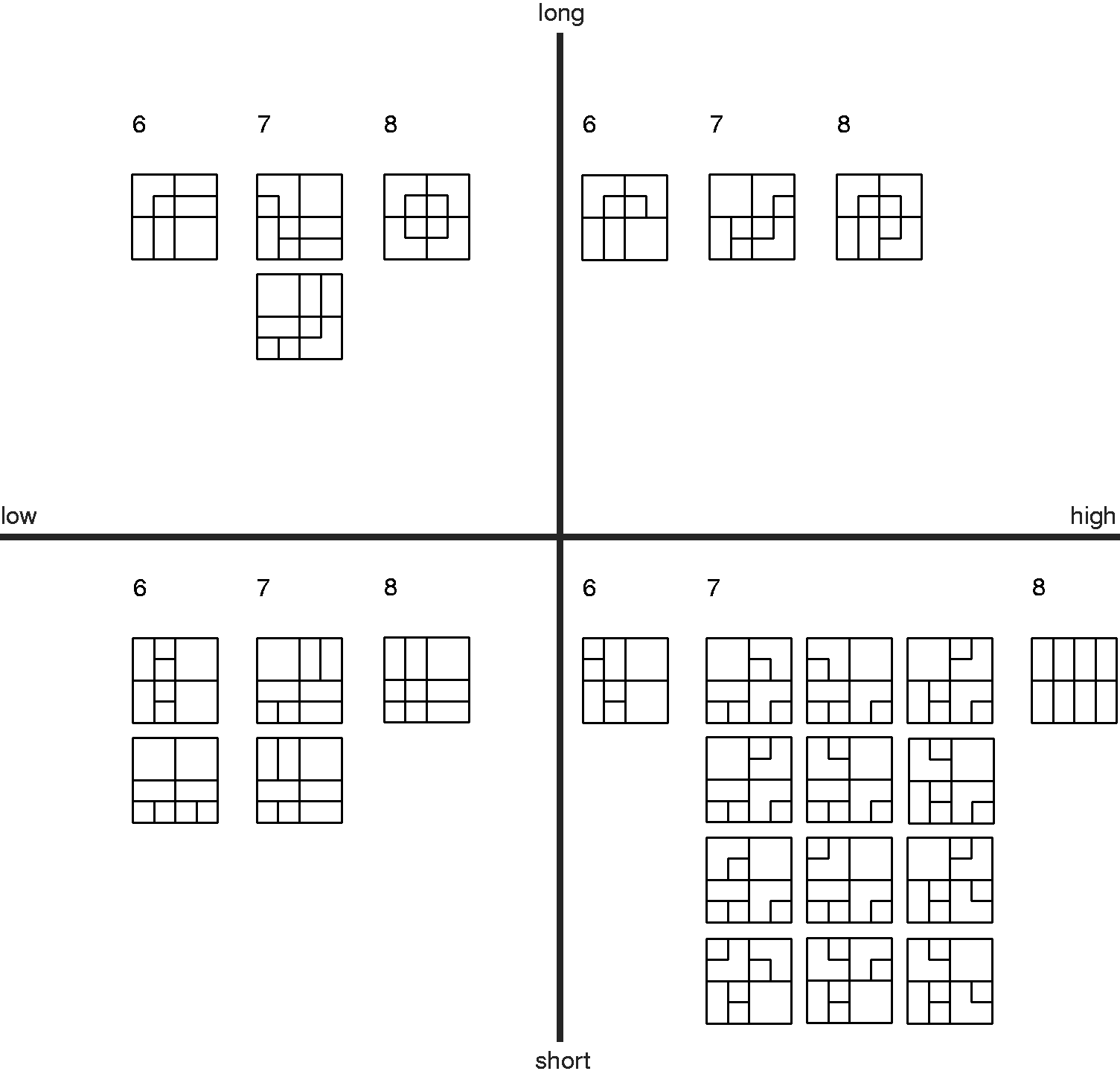
A four-box classification of subsets of designs including six, seven, or eight line segments in addition to those of the original shape. The horizontal axis indicates the lowest to highest differentiation of directional distance values from left to right. The vertical axis indicates the longest to shortest trails along nontraversing streets from top to bottom.
Consider the designs in the upper part of the figure, with long local trails. Those with the highest differentiation have either a greater variety of internal street lengths than those with the least differentiation, or trails with more direction changes. Consider the designs on the left side of the figure. Those with the longest trails have no traversing street other than the ones included in the original shape. Those with the shortest trails have at least one additional traversing street. In one case there is no local street at all and the longest local trail length is zero. Compare the designs with longest trails, on the upper part of the figure, with those with shortest trails in the lower part. Designs in the upper part always have a new nontraversing internal street that crosses the original traversing streets. Designs in the lower part never have a new nontraversing internal street that crosses the original traversing streets.
These comparisons point to the underlying dynamics that give rise to “deformed grids.” First, they highlight the difference between linearity (the extension of streets across other streets until they ultimately fully traverse the superblock) and continuity (the creation of longer trails). Linearity pushes toward uniformity, the gradual creation of a complete 5 × 5 grid. Adding continuity without pushing linearity to its limit leads to deformed grids. Second, a variety of street lengths and direction changes along continuous paths also leads to deformed grids.
Of course, as the number of added line segments increases, so the designs tend to become regular grids. The average differentiation of directional distance values peaks for designs with seven or nine additional line segments and falls after that. Similarly, the length of the longest local trail peaks for designs with 10 additional line segments and falls after that.
Limitations
Future work will address design universes produced by different sets of rules, in order to mirror the conditions found in a broad range of actual street layouts. The analysis of such universes is likely to require much more complex query algorithms than presented in this paper. Here, the following limitations apply. First, we stipulate traversing main streets in both directions. This was aimed at ensuring that the local integration core would traverse the system and link up to the arteries. Even if we agree that this is a desirable property, a future exercise might explore how such a pattern of local main streets might arise within a larger universe of possible designs, instead of being imposed at the outset.
Second, we allowed only one kind of variation of street network designs, a variation in street density given an underlying rectangular regular grid of possible streets. Other variations are possible. For example, we could allow street sinuosity. We could also replace some cross-junctions by two proximate T-junctions. Or, we could create intersections of more than four streets by adding diagonal connections to create “radial configurations.”
Third, the designs analyzed are diagrammatic. Creating urban layouts from the street centerline diagrams requires additional work, in order to provide streets with appropriate width, and to adjust the position of centerlines if a standard block face length is desired.
Thus, the present study is a first step toward the definition of typological distinctions present in the actual record of street maps. The nondeterministic interaction between the structure of street networks and patterns of land use and development density is outside the scope of this paper.
A final limitation, intrinsic to our methodology, must also be acknowledged. The exhaustive and indiscriminate application of the additive rule to the generation of all possible designs does not allow us to restrict the production of similar future design universes toward any particular type of grid: regular, polarized, or deformed. Future work could include the formulation of restrictions to the application of the rule, according to a reading of the prior design state, so as to make the production of desirable types more likely. The typological distinctions clarified by the foregoing analysis would then be embedded back into new generative rules that control the types of designs created.
Discussion
With the exception of the chapter “Is architecture an ars combinatoria?” in Space is the Machine (Hillier, 1996), there has been little concerted effort to link generative syntactic principles to an analysis of the parametric variation of universes of designs. And yet, the interplay between generative principles and parametric variations is at the core of the founding arguments in The Social Logic of Space (Hillier and Hanson, 1984). The increasing computational ease with which we can generate and analyze design universes and the concomitant ability to query and sort databases of the analyzed design universes make a return to these fundamental questions quite rewarding. Experimental design universes can be used in order to develop, question, and modify intuitions that arise as we study real examples. Strengthening design intuition based on rigorous studies and rigorous models of the built environment was, after all, a programmatic aim in the development of space syntax (Hillier and Leaman, 1974; Hillier et al., 1972). The distinctive contribution in the larger field of studies that explore urban design universes through computational models (Duarte and Beirão, 2011; Koenig and Bauriedel, 2009; Koenig et al., 2017; Yang et al., 2013) can be sought in the identification and definition of different principles for the organization of street networks, so as to contribute to the clarification of design aims and design choices.
Footnotes
Acknowledgement
The authors wish to thank Athanassios Economou for his help in the application of Pólya’s theorem.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.