
Abstract
Exoskeletons are wearable mechanical or robotic systems that augment human strength, endurance, and physical performance. They are deployed across rehabilitation, industrial, recreational, and military domains, supporting manual tasks and improving productivity. Classification can be made by actuation level, technological approach, materials, supported movements, and intended applications. Recent developments have produced a wide range of commercial products and research prototypes demonstrating advanced capabilities, yet significant challenges persist in usability, comfort, safety, acceptance, reliability, and cost. Actively actuated systems require sophisticated hardware–software integration, while ergonomic demands have led to soft exoskeletons employing compliant materials. Future advances are expected from innovations in control algorithms, materials, brain–machine interfaces, compact actuators, and high energy-density fast-charging batteries, combined with user-centred, individualized design. This review presents a comprehensive synthesis of current exoskeleton technologies, including design considerations, mobility mechanisms, power and energy management, actuation technologies, sensing and perception, and integration and control architectures. We analyse emerging trends, outline unresolved technical and ergonomic challenges, and identify promising directions for the next generation of adaptive, high-performance exoskeleton systems.
Introduction
Exoskeletons are wearable electromechanical systems designed to augment, support, or restore human capabilities by applying controlled mechanical power to the body. Since their early prototyping in the 1960s (Mosher, 1968), advances in robotics, lightweight materials, and human–machine interfaces have driven the adoption of exoskeletons in the medical, industrial, recreational, and defense domains. For rehabilitation purposes, they support gait retraining, upper-limb therapy, and neuromuscular recovery; in industrial applications, they reduce physical strain, mitigate injury risks, and gather ergonomic data; while in military and recreational contexts, they enable sustained load carriage and endurance in more demanding environments. By reducing muscle activation and redistributing physical loads, exoskeletons can improve task performance, decrease fatigue, and extend mobility for both mobility-affected and non-impaired users (Gull et al., 2020; Herr, 2009).
Given their diverse applications, exoskeletons can be classified in various ways, such as by type of actuation and control, intended use, or the specific body parts they are designed to support or augment. These classifications often inform design decisions, since the design of an exoskeleton depends heavily on the required levels of augmentation and functionality. Consequently, developing an effective exoskeleton typically involves addressing a broad range of engineering and design requirements, encompassing mechanical and electrical components, integrated subsystems, software, and the intricacies of human–machine interaction.
Nevertheless, a series of challenges, including design, application, ethical, social, and cost aspects (Siviy et al., 2023; Chen et al., 2016), have hindered the broader implementation and adoption of exoskeletons. For example, technical limitations in kinematics, sensing, control, actuation, and materials need to be tackled to develop more comfortable, long-duration, and cost-efficient exoskeletons. To improve the effectiveness of exoskeletons, more advanced sensing and control systems are needed to ensure stability, enable specific functional performance, and generate a more positive user experience (Andersson & Bjorsell, 2023; Sun et al., 2022; Tiboni et al., 2022). To achieve desired actuation, more efficient electrical motors, pneumatic or hydraulic valves, and associated transmissions or linkages are needed to limit the consumption of energy and be highly responsive to complex control signals. To meet safety and regulation requirements, the design of exoskeleton movements must be strictly compliant with the structures of a human body to avoid uncomfortable or harmful user–exoskeleton interactions (Gull et al., 2020; Bengler et al., 2023). For a more customizable and comfortable experience, compliant materials and soft exoskeletons (Perez Vidal et al., 2021) are required to offer more flexibility and adaption for different categories of body and movement, while providing the necessary levels of support, stability, and structural integrity.
Energy consumption remains a key challenge in exoskeleton applications (Chen et al., 2016), especially in those with mobile untethered devices. The latest advances in battery technology, such as higher energy density batteries and faster charging capabilities (Young & Ferris, 2017), have the potential to address this key challenge and enable more compact, durable, and powerful exoskeleton designs. Ethical challenges (Erden & Rainey, 2024) in exoskeleton solutions such as data privacy, AI autonomy, social impact, and neuro-physiological influence are also critical to address, as they will determine whether the wider application of exoskeletons would benefit humankind and society in a holistic manner.
This review surveys state-of-the-art and notable literature on exoskeleton technologies identified through searches in Google Scholar and ScienceDirect using “exoskeleton” as the primary keyword. The initial set of publications was further expanded by tracking referenced works backward through citations. The time period focused on was predominantly this century. However, we did not discount older papers simply due to publication period. We leverage the extant literature available in the academic press, along with examples of technology from industry. Except for two recent state-of-the-art arXiv preprints and the commercial products discussed in the Notable Applications section, all referenced works are peer-reviewed publications. In the following paper, we first discuss the taxonomies of the exoskeleton, review the design principle and related technologies, and consequently evaluate the ethical considerations and requirements when designing exoskeleton systems. In the end, we discuss the current limitations in exoskeleton components and propose prospects for future development. While exoskeleton technology is applicable to military applications, this review is focused principally on civil applications and associated technology.
Exoskeleton Taxonomies
Exoskeletons can be classified by the control methodologies, principal application domains, and targeted augmented body parts. Other classifications are possible according to the types of materials and interface. A typical taxonomy for exoskeletons is illustrated in Figure 1. It is possible for a particular exoskeleton to occupy more than one taxonomy class, or be categorized into multiple types within the same taxonomy class, depending on individual interpretation. For instance, quasi-passive exoskeletons, which primarily utilize passive elastic components along with lightweight mechanical and electrical controllers, exhibit characteristics of hybrid exoskeletons; however, they are often considered more adjacent to passive exoskeletons. Similarly, variable-stiffness exoskeletons and textile-integrated devices demonstrate features of both rigid-frame and soft-suit exoskeletons, but for simplicity, they may be classified as rigid–soft hybrid types. The taxonomy is therefore intended as a descriptive classification framework that highlights dominant design characteristics rather than enforcing mutually exclusive categories. With such taxonomies, a benchmark for evaluating different relevant exoskeletons becomes available. Taxonomy of exoskeletons. Note. This Figure Illustrates the Taxonomy of Exoskeleton Systems, Mapping Five Independent Dimensions: Control and Power Source, Application Domain, Augmented Body Part, Typical Task/Motion, and Structural Material to Give a Clear, Non-Overlapping Basis for Comparison.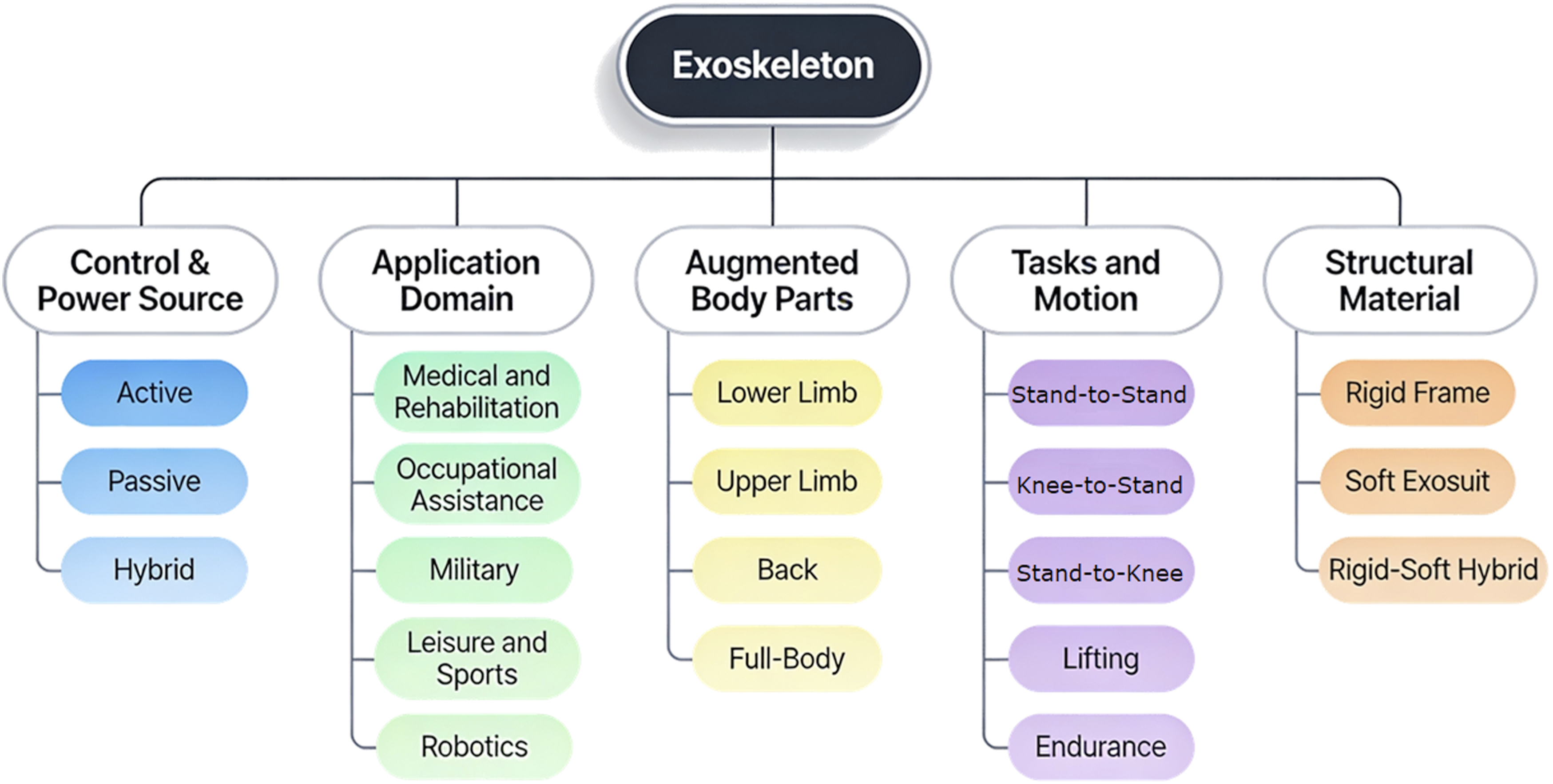
For example, exoskeletons could be typed according to their usage in medical assistance and rehabilitation, industrial and military applications (Mendoza et al., 2023; Bogue, 2018), recreational activities, and data pipelines in AI and robotics. In the medical domain, exoskeletons are used to assist rehabilitation, particularly for people with mobility impairments due to spinal cord injuries or strokes, helping restore functional movement and improve physical capability (Butnaru, 2021; Perry et al., 2007). In the industrial domain, exoskeletons could assist workers in repetitive movements and force-intensive jobs, help mitigate the risks of work-related injuries (Pitzalis et al., 2024; Antwi-Afari et al., 2021), and improve their overall productivity (de Looze et al., 2016; Bennett et al., 2023). In the recreational domain, exoskeletons are adopted in different casual activities, such as virtual reality games (Park et al., 2018; Qi et al., 2024), walking (Sawicki et al., 2020), climbing (Rathbum et al., 2023), and sports (Kim et al., 2024), creating a significant potential market opportunity. In addition, recent trends have shown increasing popularity for the utilization of exoskeletons in embodied AI and robotic applications, showcasing their unique value in robotic teleoperation (Falck et al., 2019; Toedtheide et al., 2023), data acquisition, and imitation training for humanoid robots (Zhong et al., 2025). The application of the aforementioned exoskeletons (de Looze et al., 2016; Bennett et al., 2023; Sawicki et al., 2020; Rathbum et al., 2023) was principally civil applications, although dual use in military contexts is recognized but not a focus in this review.
Depending on the control mechanisms and power sources, exoskeletons could be classified as active, passive, or hybrid (Preethichandra et al., 2024; Missiroli et al., 2022). Active exoskeletons use motors, hydraulics, pneumatics, and other forms of actuators to drive movements and require an external power supply which can be provided either through a tether or a local energy source such as a chemical battery.
Passive exoskeletons use springs and counterweights to reduce effort and possibly dampers to enhance control, but they do not require an external or local energy supply other than the user’s body. Hybrid exoskeletons utilize a combination of external and intrinsic energy sources, typically incorporating motors and actuators along with human body-driven mechanisms.
Based on the type of motion and tasks, exoskeletons are categorized into different functionality archetypes, such as Sitting to Standing (STS), Kneeling to Standing (KTS), Standing to Kneeling (STK), Lifting stability, and Endurance support. An STS exoskeleton is a wearable robotic device that assists a person with lower limb impairments in transitioning between sitting and standing positions. STS exoskeletons have particular applications for people with mobility challenges arising from conditions such as stroke (Shepherd & Rouse, 2017; Huang et al., 2021), spinal-cord injuries, and ageing (Blalack et al., 2024). They typically incorporate advanced control systems, using techniques such as constrained optimization and quadratic program-based computed-torque controllers to provide safe, comfortable, and effective STS assistance. A KTS exoskeleton assists individuals in transitioning between kneeling and standing positions. Such movements are common in work that involves frequent kneeling, such as nursing, construction (Chen et al., 2021), and maintenance roles. KTS exoskeletons could mitigate the impact of these repetitive actions, thus helping prevent physical strains and injuries for target users. Similarly, STK, Lifting stability and Endurance type exoskeletons assist people in standing to kneeling transitions (Chen et al., 2021), stabilize their lifting actions (Huysamen et al., 2018), and increase their endurance in different activities (Mai et al., 2025), making them useful in a wide range of user scenarios.
We could also categorize exoskeletons according to their augmented body types and structural materials. Examples of these exoskeleton types are illustrated in Figure 2. Exoskeleton Targeting Different Body Parts.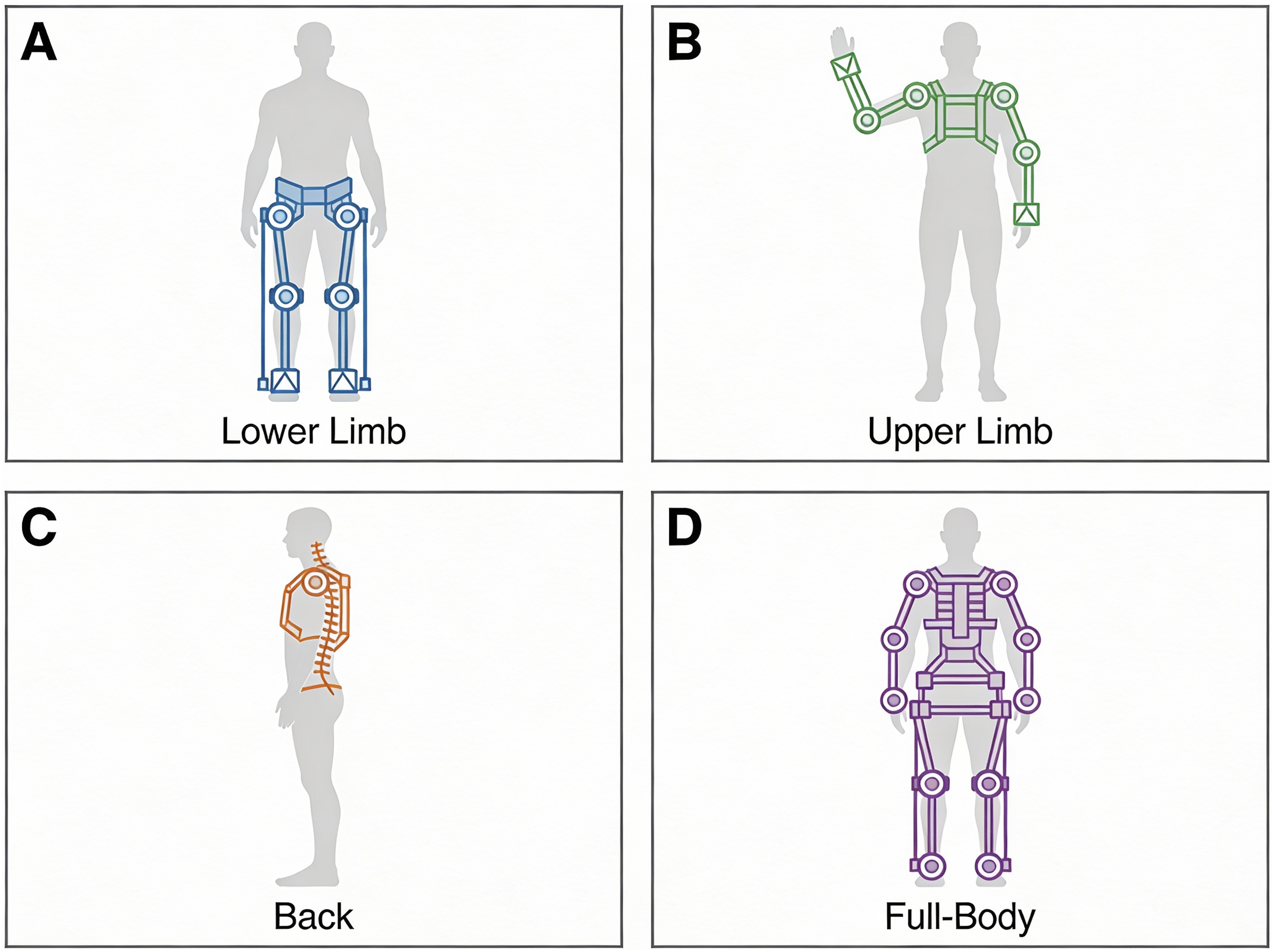
Technologies and Materials
Design Considerations
The design of exoskeleton solutions involves the consideration of multiple factors common to many robotics applications. These design factors include hardware, software, integration, human factors as well as standard considerations of feasibility, desirability, and viability (Wolff et al., 2014). There can be various specification parameters that need to be addressed or mitigated. Common technological design specifications for exoskeleton consist of the following factors: mobility mechanisms, power supply and energy management, actuation technologies, sensing and perception systems, integration, and control architectures. In addition to technological factors, safety, ethical, and socioeconomical factors (Maurice et al., 2018) are also crucial in the overall design considerations. Design considerations are a core part of the development of exoskeleton systems, and largely affect the design and implementation of different subsystems. A typical relationship between design considerations and key subsystems is presented in Figure 3. In the following five subsections, we will introduce some of the key technological subsystems. Relationship Between Design Considerations and Considered Key Technological Subsystems in Exoskeleton Development.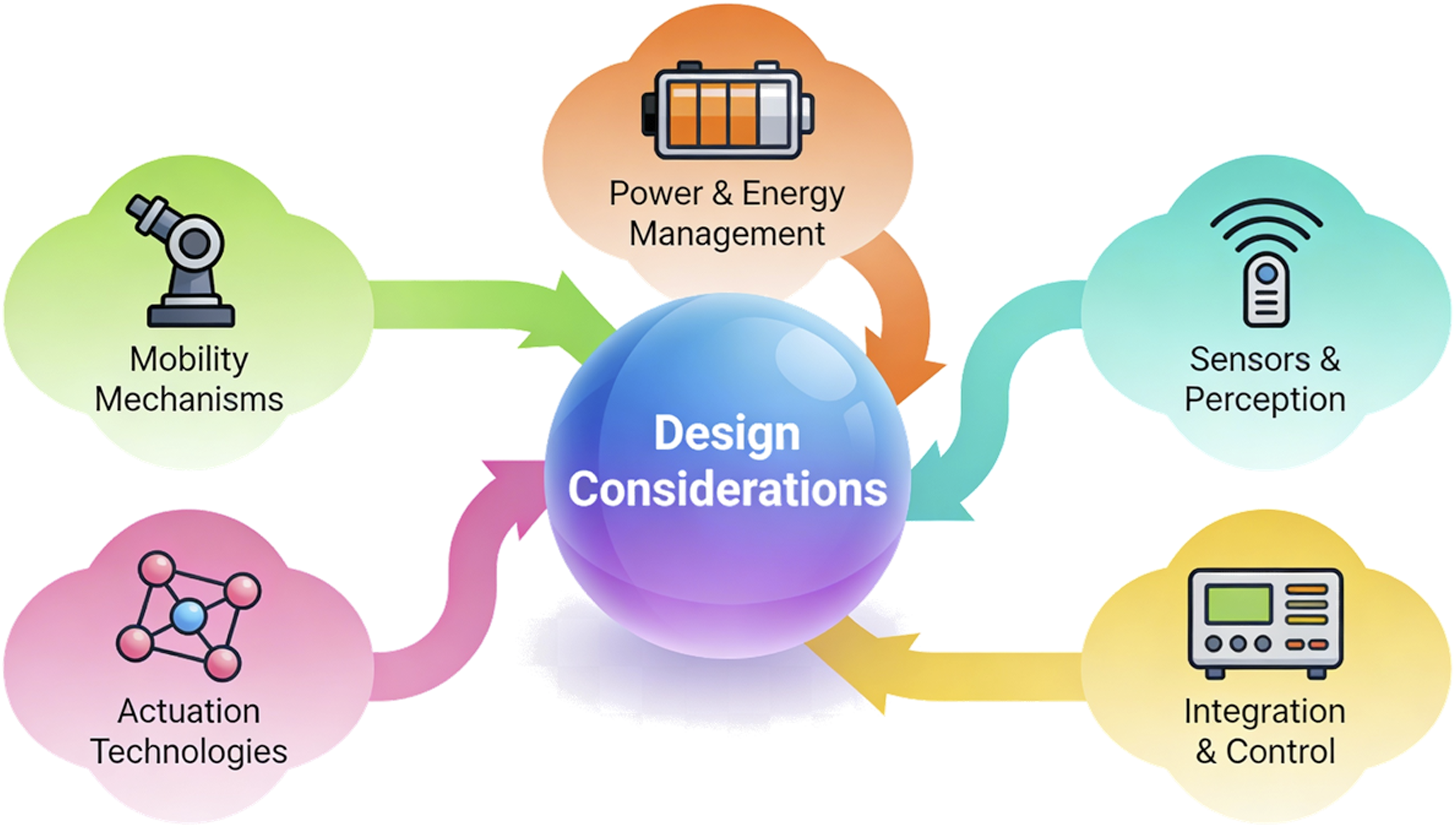
Mobility Mechanisms
Robotic mobility can be achieved through a variety of mechanisms, including wheeled and legged systems, thrust-based propulsion, electromagnetic levitation, whegs (wheeled-leg hybrids), and snake-like locomotion. The choice between the stability offered by wheeled or tracked systems and the terrain adaptability provided by legged configurations—coupled with human enhancement goals—has led to the predominant adoption of legged morphologies in exoskeleton design (Zoss et al., 2006; Tsagarakis et al., 2011).
However, hybrid designs that blend wheel use for fast movement over flat terrain with legged operation for rough terrain have been explored to provide versatility. Legged exoskeletons typically demand more power and exhibit greater mechanical and control complexity than wheeled systems (Zoss et al., 2006). Energy efficiency is another critical design parameter: many applications require untethered, highly mobile systems. Accordingly, exoskeletons are often classified as either passive devices—such as unpowered systems that reduce energy cost by exploiting biomechanics—or actively powered systems that rely on mobile energy sources such as electric batteries (Collins et al., 2015). Developments in soft exoskeleton technology, featuring compliant materials and new actuation approaches, offer further potential for compact, ergonomic, and efficient device designs (Thalman & Artemiadis, 2020). The comparison between different types of mobility mechanisms is showcased in Figure 4. Comparisons Between Different Types of Mobility Mechanisms in Robotic Systems.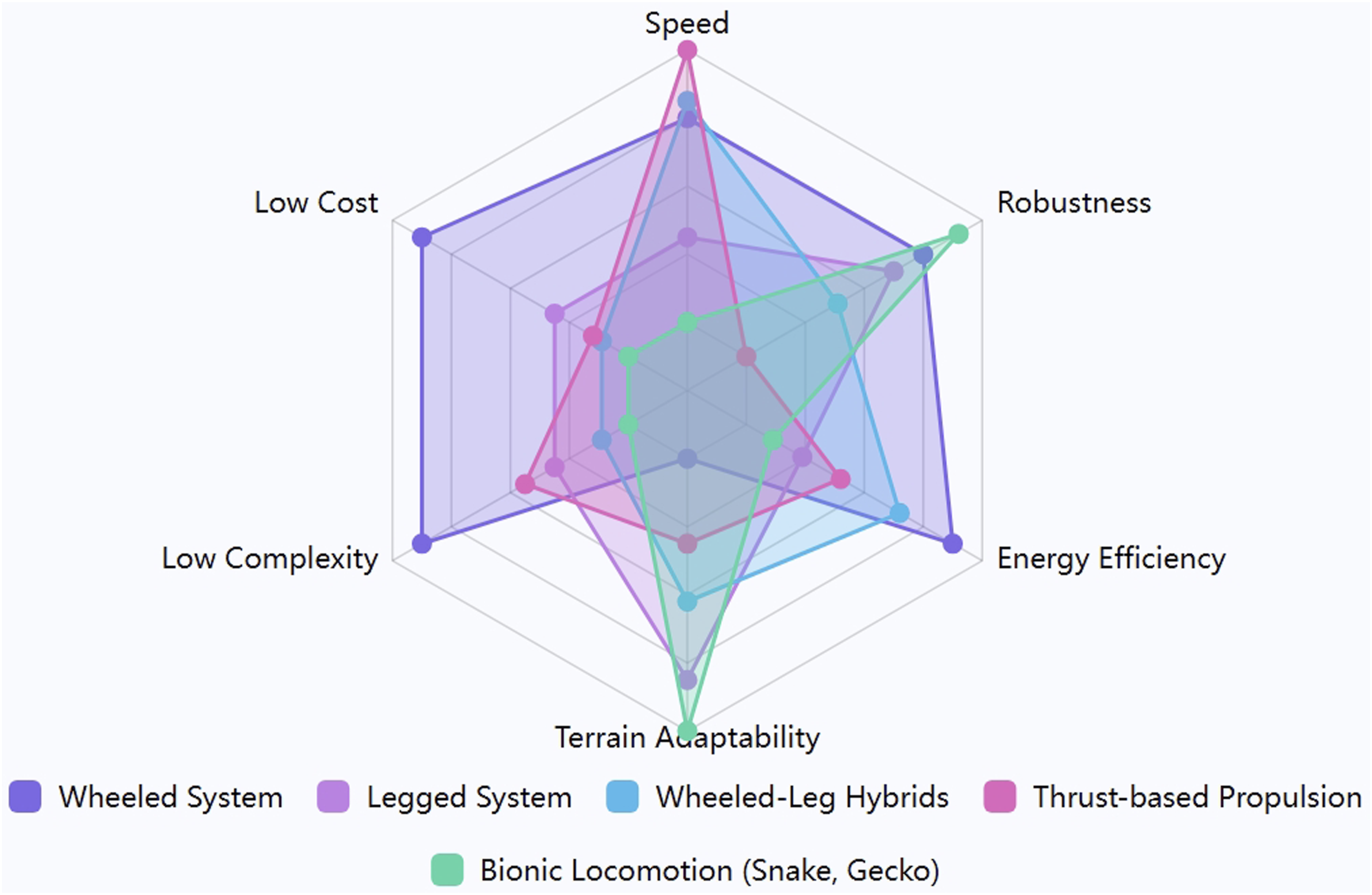
Power Supply and Energy Management
Battery selection in exoskeleton tends to involve multiple trade-offs between energy density, safety, battery life, and costs. Lithium-ion (Li-ion) batteries are technically mature and provide good levels of energy density (Liu et al., 2021), but they are susceptible to impact and heat issues and suffer from capacity degrading over time. LiFePO4 batteries are chosen for their high safety standards and long cycle life, but they have relatively lower energy density and longer recharging time. Solid-state batteries (Kim et al., 2015) promise higher energy density, faster charging, improved safety, and longer lifespan, but they require complex infrastructure which leads to high manufacturing cost. Lithium-Sulphur (Li-S) Batteries (Fotouhi et al., 2016) promise significantly higher theoretical energy density than their lithium-ion counterparts but suffer from poor cycle life and low recharging efficiency problems. There have also been advances in conformal and stretchable batteries, which could enable thin and flexible energy storage systems, improving exoskeleton weight distribution and enhancing user experience. The characteristics of major battery types are showcased in Figure 5. Comparisons of Characteristics Between Major Battery Types Used in Robotic Systems.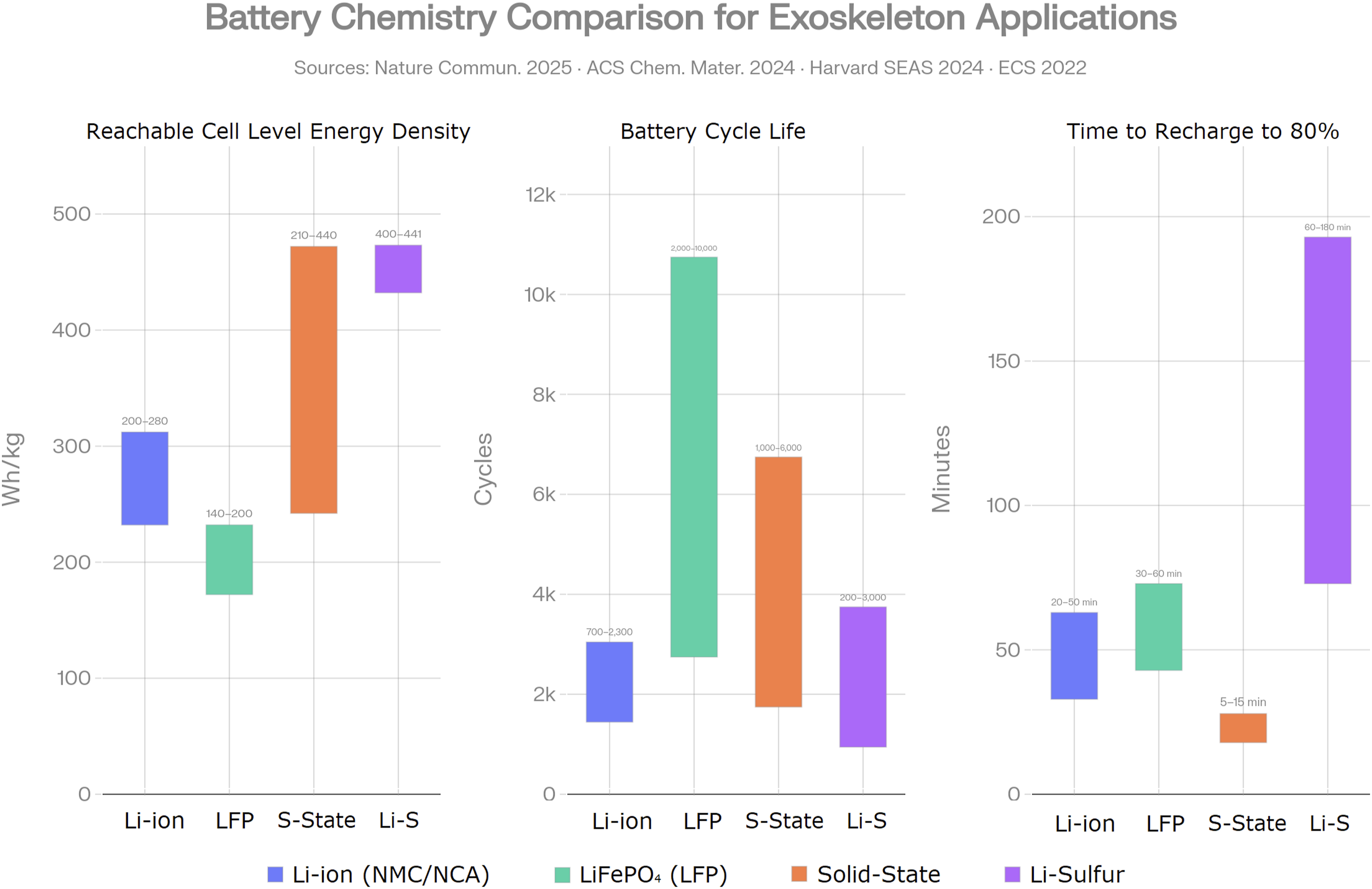
Battery and Power Options for Exoskeletons.
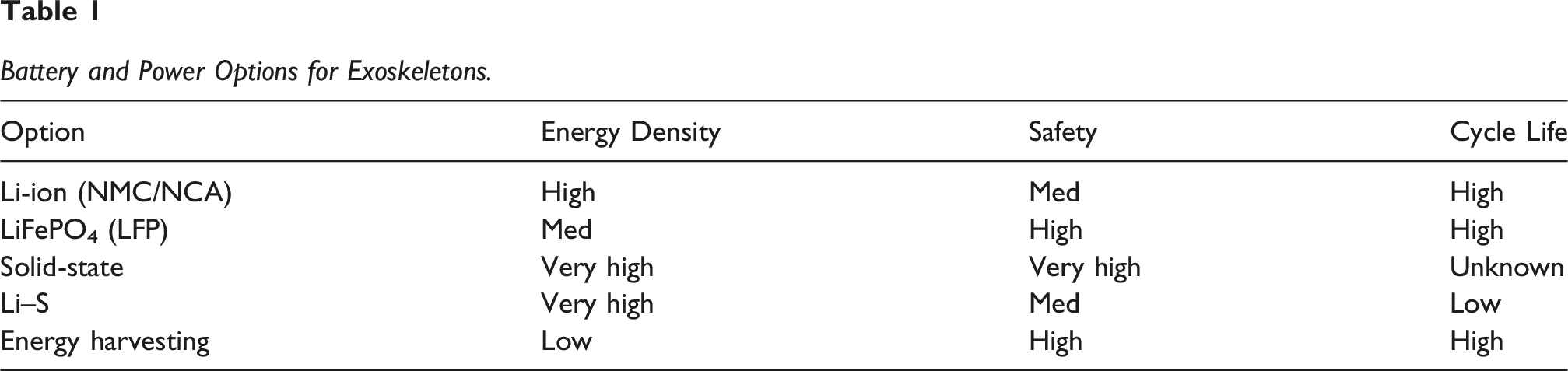
Summary of representative battery chemistry and power options relevant to exoskeleton applications. The attributes of each battery type are categorized into four classes—Low, Medium, High, and Very High. These categories were determined through a comparative clustering analysis, where the relative positions of the clustering results were used to assign each attribute to the corresponding level.
It is also important to consider cooling in energy systems where possible when designing exoskeletons. Energy consumption produces heat from resistive heat generation, which needs to be dissipated to avoid discomfort for the user and heat-induced degradation in system components such as motors, batteries, or sensors.
Actuation Technologies
Electric motors power exoskeletons by functions such as driving rotary-to-linear actuators and rotating joints. Because some types of electrical motors deliver high speed but low torque, they are typically combined with a high-ratio reduction gearbox that converts this high speed into the low-speed, high-torque output required by exoskeleton joints (Childs & Masen, 2024). When selecting a motor, four main factors are considered by designers: (1) weight: lighter motors reduce energy and user fatigue; (2) efficiency: higher efficiency extends battery life; (3) control precision: smooth, responsive motion is essential; and (4) back-drivability: the joint should move freely when the motor is disengaged.
Common electric motor options include the following: • • • • •
Comparisons between different types of actuators and motors are showcased in Figure 6. By matching the motor type to the application’s torque, precision, and weight requirements, designers can optimize both user comfort and system performance. Comparisons Between Different Types of Actuators and Motors Typically in Robotic Systems.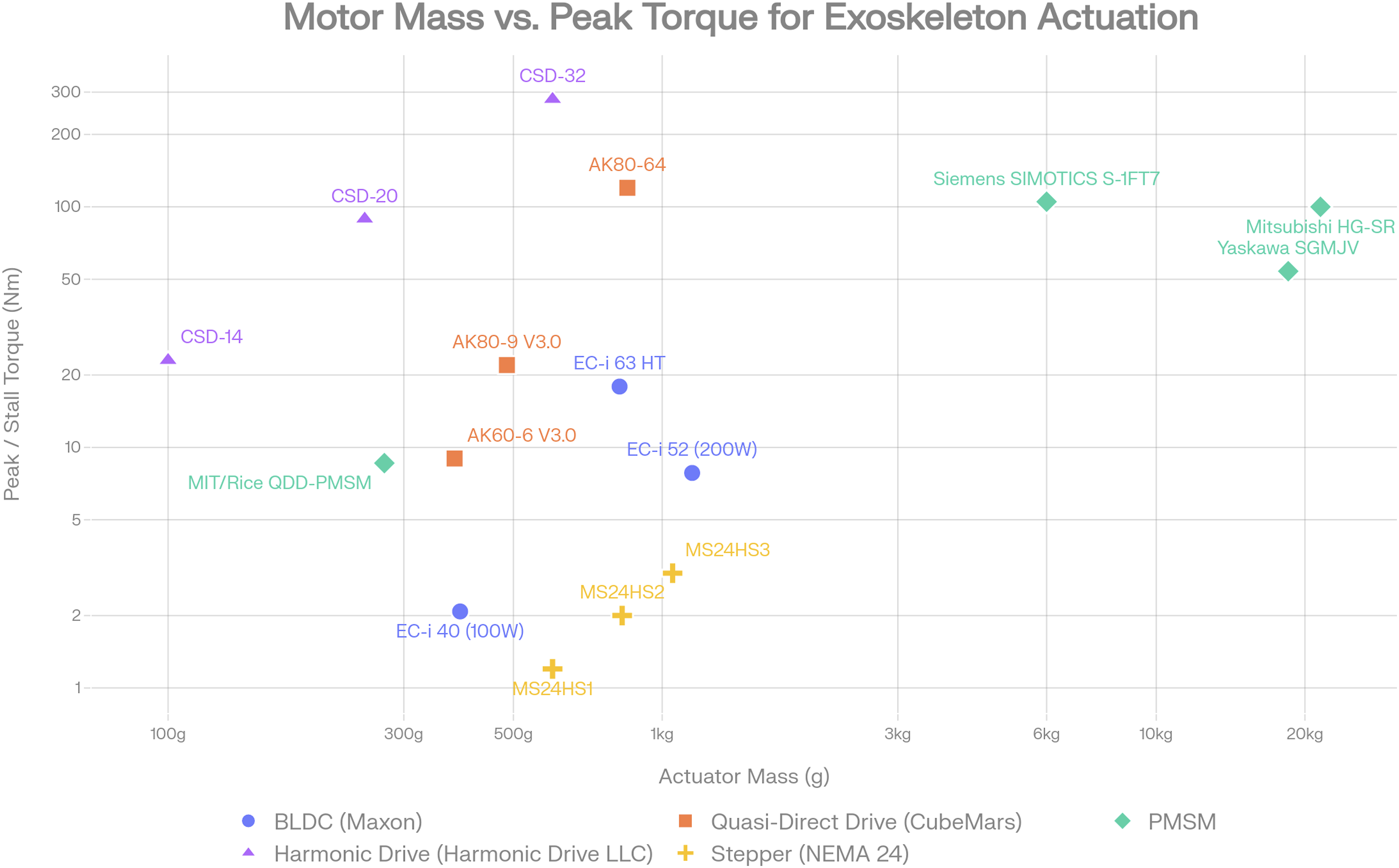
A number of other key transmission technologies are used in exoskeleton drives including series elastic actuators, linear actuators, magnetorheological fluid actuators, shape memory alloy (SMA) actuators, and hydraulic-electric hybrids. Series elastic actuators combine an electric motor with a spring element for effective force control and shock absorption. They offer improved compliance, reduced injury risk, and better energy efficiency and applications include soft exoskeletons. Electromechanical linear actuators convert rotary motion to linear motion. They can be used to enable the extension of a component or feature. They are relatively simple devices exhibiting reliable force control, which are widely used in exoskeletons, for example, lower-body exoskeletons assisting in walking. Magnetorheological Fluid Actuators provide adjustable damping for adaptive resistance. Shape memory alloy (SMA) actuators are lightweight and characterized by silent operation, but they tend to give low forces only. Hydraulic-electric hybrids combining electric motors with hydraulic amplification for high power.
Sensing and Perception Systems
Motor control in exoskeletons depends on both mechanical design and electronic sensing. For example, stepper motors allow precise regulation of the armature’s angular position, while localization—determining the position of a system relative to a defined reference—remains a key requirement for reliable operation. In many exoskeleton applications, actuation is triggered by the movement of specific body parts, such as muscles, requiring continuous monitoring.
Inertial measurement units (IMUs) are widely used for tracking limb dynamics, while LiDAR systems generate 3-D point clouds to capture the surrounding environment. SLAM (Simultaneous Localization and Mapping) algorithms, as in the ExoSense system (Wang et al., 2025), build spatial maps from this data, and deep learning has been applied to real-time, user-independent slope prediction (Lee et al., 2021). Reinforcement learning (RL) further enables adaptive path planning under varying conditions (Tu et al., 2021).
Encoders convert mechanical motion into electrical signals, providing essential kinematic parameters such as joint speed, angular position, and rotation direction. When combined with other sensing modalities—such as LiDAR, vision-based cameras, and IMUs—encoder data supports sensor fusion, enabling precise estimation of the relative positions and orientations of system components. This multimodal perception framework enhances control accuracy, supports autonomous or semi-autonomous functions, and improves the safety and adaptability of exoskeleton systems.
Integration and Control Architectures
Robots typically incorporate wiring looms to route power and data cables. In exoskeletons, where joints and components move relative to one another, cabling must transition cleanly between linkages or subsystems. Careful design is essential to ensure the integrity of wiring looms, preventing damage during operation and avoiding fatigue in individual wires and transition points. Additionally, protection against electromagnetic interference for data signals must be considered, potentially requiring shielding and testing to ensure compliance with relevant standards such as RTCA (2023).
Beyond physical integration, software frameworks are critical to coordinating the multiple subsystems of an exoskeleton. Robot Operating System (ROS) (Macenski et al., 2022) provides a widely adopted platform for hardware communication, low-level device control, and inter-module data exchange. Within this architecture, applications serve as the interface between the user and the system’s hardware and software, enabling task-specific functionality.
Processing capabilities play a central role in implementing these control frameworks. Exoskeletons employ a range of processors, from FPGAs for low-latency control loops to GPUs for AI-based perception and decision-making. Depending on the operational context, computation may occur locally at the edge for responsiveness or be distributed to cloud resources when high-bandwidth connectivity is available.
These hardware and computational foundations support a variety of control strategies. Common approaches range from proportional–integral–derivative (PID) (Johnson & Moradi, 2005) controllers to model predictive control (MPC) (Morari & Lee, 1999), with adaptive control particularly important for tasks involving dynamically changing conditions, such as variable payload handling. Control design is closely linked to gait mechanics, a fundamental aspect of lower-limb exoskeleton operation. Gait—the coordinated movement of limbs, pelvis, and spine—is analysed through kinetic and kinematic parameters such as speed, cadence, stride length, joint angles, and ground reaction forces. Understanding the gait cycle, which alternates between stance and swing phases, is essential for optimizing walking patterns and ensuring user comfort.
Finally, effective control also depends on intuitive user interfaces (Fleischer & Hommel, 2008) that facilitate human–machine interaction. Approaches include natural language processing for voice commands, gesture or intent recognition for collaborative tasks, and immersive interfaces using AR or VR. Haptic feedback can further enhance precision and situational awareness. Hybrid control methods, combining user-initiated and autonomous functions, can improve adaptability and task performance across diverse application contexts.
There have been many state-of-the-art and breakthrough demonstrations of exoskeleton technology. Figure 7 presents a selection of these based on the literature review. Some state-of-the-art exoskeletons. Note. This Figure Demonstrates State-of-the-Art and Breakthrough Exoskeleton Technology. (a) The Soft Exosuit Comprises a Waist Belt, Calf Wraps, and Vertical Straps. It Innovatively Uses a Bowden Cable Actuator to Assist Ankle Plantar Flexion and Indirectly Support Hip Flexion via Force Transmission Through the Straps (Quinlivan et al., 2017). (b) The ReWalk ReStore™ (ReWalk Robotics, Israel) is a Soft Robotic Exosuit Developed to Aid Individuals With Post-Stroke. It Helps Individuals to Specifically Perform Ankle Dorsiflexion and Plantarflexion (Shin et al., 2022). (c) Superflex Exosuit Prototype (Front and Back Views) (SRI International, 2022). This is a Representative Full Body Suit Integrated With Exoskeleton Components. (d) Wyss Institute’s Ankle Exosuit, a Very Lightweight Exoskeleton Targeted to Relieve Ankle and Knee Burden During Walk. Image Credit: Biodesign Lab, Harvard John A. Paulson School of Engineering and Applied Sciences, Harvard University. Adapted From Nuckols et al. (2021).(e) DE VITO: One of the State-of-the-Art Rigid Exoskeleton Systems Which Provides Functionalities for Upper-Body Robot Teleoperation (Falck et al., 2019). (f) A Rigid Exoskeleton for Lower-Body Support With Advanced Machine Learning-Based Perception and Controls Algorithms (Luo et al., 2024).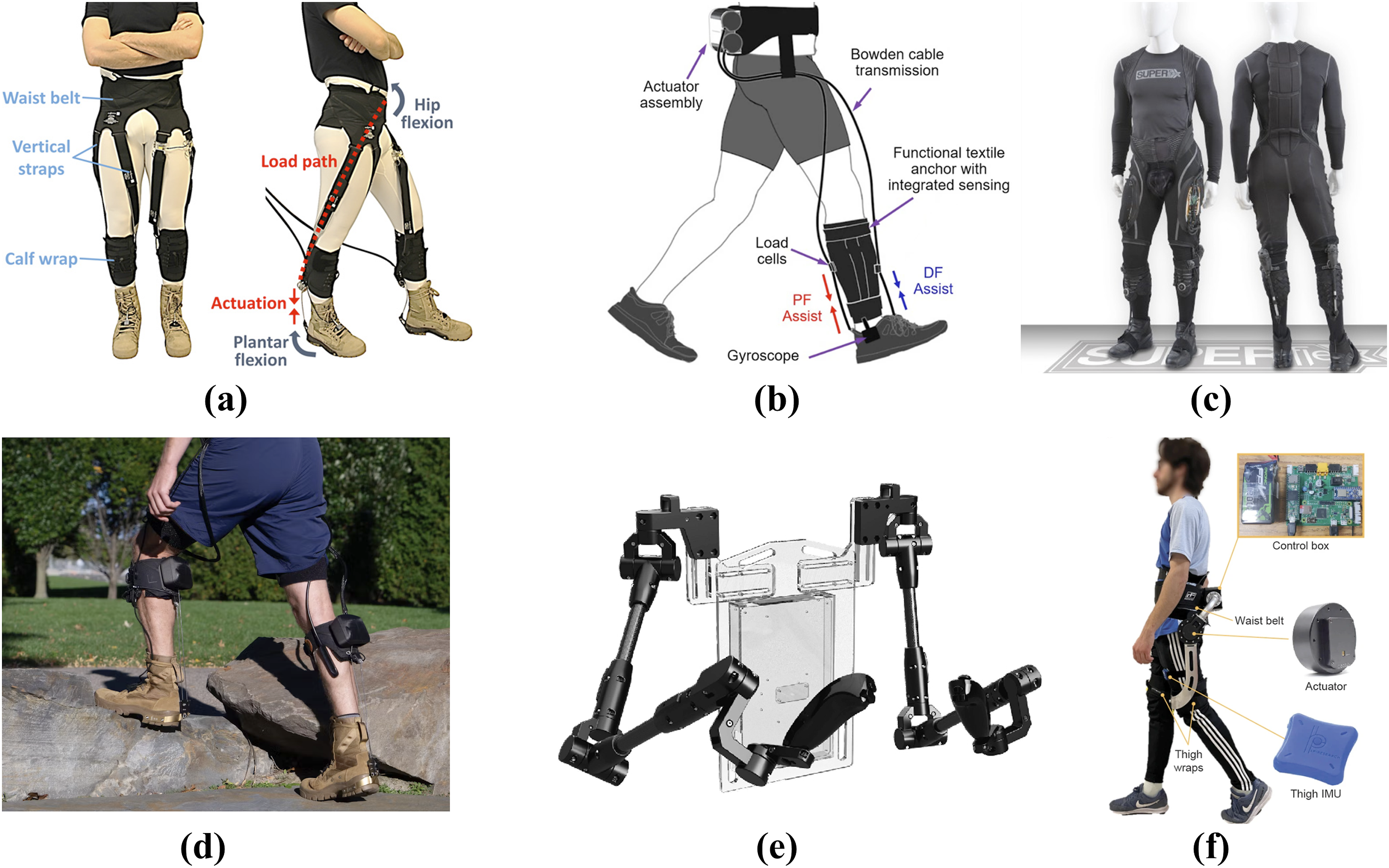
Ethical Considerations
Data Privacy and Autonomy
A wide range of ethical issues arise with exoskeletons and their use, ranging from data collection and privacy to security, legal liability, and their use in military and policing applications (Agarwal & Deshpande, 2019; Siedl & Mara, 2024). Exoskeletons, as a result of their intimate proximity to the user, along with learnt information, have access to a significant quantity of information, such as personal physical information as well as locational information. Sensors and cameras can detect diverse information such as conversation, voice prints, and images. The need for stability and safe enhancement of gait can require significant application of machine learning, resulting in a database with information about personal physical attributes. Positional awareness sensors, including cameras, LiDAR, or other proximal sensing devices, are capable of gathering information on what objects are, their relative locations, and locality. The use of voice-activated interfaces may mean continuous monitoring of conversations. Each of these requires consideration of privacy, and addressing surveillance protocols with due consideration of requirements for function and respect for privacy and legal regulations. As a result, how data such as the biometrics associated with movement, muscle activity and health, as well as locational information, are stored and shared is a significant area for due consideration, along with the requirements for informed consent (Ofori et al., 2025).
Further issues arise from the use of autonomous and quasi-autonomous control for overall systems and subsystems. Machine learning and other forms of AI are widely used in exoskeletons, for example, control of gait and localization. Use of AI is subject to significant regulation and ethical concerns, which have been widely explored for the consideration of whether decisions are explainable and occurring in the interests of the individuals, society, and in compliance with legal stipulations. These considerations are particularly important for exoskeletons, where harm could potentially arise to the user or others due to mismatched motions that fail to meet user needs, malfunctions, or unsafe interactions between the user, the exoskeleton, and third parties (cf. the trolley problem and the question of responsibility when a robot causes harm). In the case of medical applications, compliance with FDA and ISO regulations may be necessary (e.g. ISO 10218-1 International Organization for Standardization, 2025a, ISO 10218-2 International Organization for Standardization, 2025b, and ISO/TS 15066 International Organization for Standardization, 2016). In the case of products in the EU consideration of compliance with the relevant standards to enable provision of a CE mark will be necessary (Fosch-Villaronga et al., 2023). Such requirements may require the development of appropriate safe modes for the various subsystems (Nasr et al., 2025).
Socioeconomic and Human Factors
Human factors play a significant role in the development of exoskeletons, as the design of such systems is largely determined by the user requirements of the target population. For elderly users, the primary objective is to support age-related declines in muscle strength, balance, and mobility, while ensuring comfort, ease of use, and safety during daily activities such as walking or standing. For individuals with disabilities, it is crucial that exoskeleton systems provide higher levels of assistance, offer substantial support for basic movements, and adapt to each user’s specific needs. Additionally, these systems should support rehabilitation and therapeutic objectives, enabling both short-term physical improvements and long-term functional recovery. For industrial workers, the emphasis shifts to reducing physical workload, preventing musculoskeletal injuries, and improving endurance during repetitive or physically demanding tasks, while enhancing productivity and allowing natural movement. Recognizing these distinct core requirements will empower more user-centred design approaches and make exoskeleton solutions better tailored to the specific needs of each user group, achieving better user experiences and socioeconomic values.
In industry, exoskeletons have already been developed for applications such as maintenance, load carrying in warehouses, and logistics. These developments raise important ethical considerations related to changes in work practices, potential job displacement, and the need to prepare individuals for collaborative and cyber-physical interactions (Pote et al., 2023; Erden & Rainey, 2024). In rehabilitation contexts, concerns have been raised about users becoming psychologically or physically over-reliant on the technology, potentially reducing motivation for natural recovery (Borenstein et al., 2018; Bulboaca et al., 2017). In industrial settings, overuse of exoskeletons may lead to muscle weakening if the device performs too much of the physical effort, and poorly designed systems may even cause joint or spinal injuries. The question of whether exoskeletons should be used to enhance the capabilities of able-bodied individuals—such as workers—has also attracted considerable debate (Pote et al., 2023; Siedl & Mara, 2024). This raises an important issue: it is possible that technological augmentation will lead to new social inequalities, creating what might be termed as the “augmentation gap.” Existing exoskeleton products are typically priced over $5,000, with more advanced or specialized models such as custom-made systems often exceeding $100,000. If access to advanced exoskeleton technologies is limited to certain socioeconomic groups or industries, it could widen existing disparities in terms of physical capability, productivity, health, and quality of life. Those with access to such technologies may gain significant advantages in the workforce or daily activities, while others may be left behind, unable to benefit from the same technological advancements. This potential divide will not only deepen economic and social inequalities but also influence power dynamics, with augmented individuals and groups gaining new forms of leverage over those without access to such enhancements.
Neuroscience and Emerging Ethical Challenges
Developments in neuroscience lead to requirements for further considerations and possible consequences (Morimoto & Kawato, 2015; Schurmann et al., 2019). Empathy algorithms have the potential to recognize distress and could thereby respond, or not. The developing field of neuroethics may offer some insights and contributions on the use of cognitive bias and its possible exploitation for addictive behaviour. Neuroplasticity has been widely recognized (Drigas & Sideraki, 2024; Fuchs & Flügge, 2014; Leaf et al., 2023; Puderbaugh & Emmady, 2023) with thoughts influencing physicality and DNA and vice versa. Exoskeletons with their influence on body movement can, as a result, rewire neural motor pathways and therefore potentially influence the essence and direction of a person’s humanity (Siedl & Mara, 2024). Integration of cognitive neuroscience and robotics technologies can be expected to lead to machines that learn, adapt, and interact in increasingly human-like ways. This raises possibilities such as seamless human–robot interaction along with ethical dilemmas of autonomy versus control. It is plausible that this will result in an increasing demonstration of robots transitioning from rigid, pre-programmed tools to flexible, brain-inspired partners.
Notable Applications
Commercial exoskeleton products have addressed market opportunities through addressing a broad range of design considerations. Nominated as one of the 200 best inventions in 2024 by Time Magazine, Arc’teryx and Google X Labs’ affiliate Skip have collaborated on Mo/Go (Arc’teryx and & Skip, 2024), hiking pants that use adjustable carbon fibre cuffs and electric powered motor modules to support the knees of climbers. It is claimed that the exoskeleton could provide at most 40% of boost to the legs in inclines and make the users feel up to 13.6 kg lighter. Shift Robotics developed Moonwalker (Shift Robotics, 2023) and Moonwalker Aero, shoe-inspired exoskeletons that use reinforced plastics and high-pressure-cast aluminium for structural components, and utilize in-house OS and electronics hardware to achieve jet propulsion level stability in movements. The Moonwalker series is claimed to enable users to walk swiftly and effortlessly as fast as running—even in rough outdoor environments. Hyundai Motor Group’s Vest Exoskeleton (VEX) is an arm-assisting exoskeleton designed to support long overhead activities. This can be adjusted according to user preference and allows for fully ranged arm movements. As a passive exoskeleton, VEX is based solely on mechanical mechanisms and uses a polycentric axis system specialized in upper arm support, which could give significant relief to users in heavy workload settings. Onerzia, focussing on hip support, is another passive exoskeleton targeting athletes after intensive exercise or injuries. This uses ergonomic design to offer high wearability comfort, and applies spring mechanisms on the hips to facilitate natural leg movement, to provide muscle support, help reduce fatigue, and ensure safe walking. Similarly, products such as Mountaineering, Hypershell, DNSYS, VIGX, and Elevate provide support for casual activities such as jogging, mount-climbing, and skiing. Products such as Hybrid Assistive Limb, EksoNR, ReWalk, Indego, and WalkON Suit F1 have been developed to help people with disabilities or mobility impairments to walk and enhance the result of their rehabilitation. Products including COMAU, HeroWear Apex, and Festool ExoActive are aimed at helping workers to reduce strain and injury risks in heavy and physically demanding work environments. Interestingly, Dog Reh-Assist, one of the 2024 Red Dot Award winners, was designed for paralysed dogs to help them with rehabilitation and mobility. The exoskeleton would use forelimb EMG signals from the dog user to predict its hindlimb gait, and as a result support the walking more stably. The owners could also choose training mode in the app and the exoskeleton in turn collects real-time health data, which could be employed to make personalized dog rehabilitation plans. Figure 7 demonstrates some of the state-of-the-art and breakthrough exoskeleton technology.
Prospects for Development
Challenges with exoskeletons include achieving kinematic compatibility, advancing sensing and control technologies, designing for specific applications, and developing effective actuation and sensor systems. Addressing all these challenges requires advances in the specific area as well as a multidisciplinary approach integrating insights from domains such as biomechanics, ergonomics, and bionics (Preethichandra et al., 2024; Bengler et al., 2023; Herr, 2009; Li et al., 2014) with a focus on user-centred design to enhance their functionality and adoption.
The effectiveness of exoskeletons relies on sensing and control systems. Limitations in these technologies affect stability, comfort, and the overall user experience. However, advances in sensors, sensor fusion, and control algorithms provide significant prospects for improvement.
More intuitive and flexible user interfaces are crucial for exoskeletons. Improved control strategies that enhance human–machine interaction need to be developed to make exoskeletons more user-friendly and effective (Andersson & Bjorsell, 2023; Gull et al., 2020; Young & Ferris, 2016).
Soft exoskeletons, which offer flexibility in component and subsystem and thereby increased comfort, face significant challenges in implementation in terms of power and data transmission, control systems, and maintaining structural integrity while being lightweight. Lightweighting, typically the selective use of voids in a lattice structure, has resulted in a range of materials that offer significant advantages in comparison to solid equivalents (Zhu et al., 2018; Pan et al., 2020; Wang et al., 2024).
Application and development of state-of-the-art understanding of brain–machine interfaces for real-time control of exoskeletons offers significant potential. For example, Ferrero et al. (2024) have developed a motor imagery (MI)-based brain–machine interface (BMI) using deep learning algorithms to control a lower-limb robotic exoskeleton and demonstrated improved results compared to conventional systems. Meanwhile, frontier brain/neural exoskeletons (B/NEs) could convert brain/neural activity into control signals of wearable actuators and have been in clinical trial study for a considerable amount of time (Colucci et al., 2022). The fusion of cognitive neuroscience and robotics has the potential to lead to machines that learn, adapt, and interact in increasingly human-like ways.
Enhanced energy storage capability arising from advances in battery technology from adjacent applications offers transformations in terms of the capability and endurance of exoskeletons. For instance, by integrating silicon, sheet-type solid electrolytes, and thick NMC811 positive electrodes (Kim et al., 2025) has demonstrated a solid-state battery prototype with an cell-level energy density of 380 Wh/kg at 25°C and 400 Wh/kg at 50°C. Furthermore, they proposed strategies to achieve energy density of 400 Wh/kg in commercial-scale systems, advancing beyond the material-level investigations—almost double the cell-level energy density of conventional lithium-ion batteries (150–250 Wh/kg)—potentially extending operational time from 6 h to over 10 h for lower-limb exoskeletons (Janek & Zeier, 2016). Similarly, lithium–sulphur batteries, with a theoretical specific energy of 2600 Wh/kg, have the prospect of reaching a practical cell-level specific energy of 500–600 Wh/kg in the near future (Yari et al., 2025), which could in theory more than double the runtime of existing human augmentation products, while significantly reducing the energy modular pack weight (Manthiram et al., 2014).
The combination of advanced brain–machine interfaces and next-generation energy storage technologies has the potential to redefine the design and usability of exoskeletons. While BMIs enable more intuitive, adaptive, and user-specific control, enhanced battery performance extends operational time and reduces the physical burden of power systems. Together, these developments form the foundation for a new generation of exoskeleton innovations that could seamlessly integrate into daily life, address diverse user needs, and open up entirely new markets. Possible future developments include the following: • • •
Furthermore, a practical example of these prospects can be seen in the conceptual design of an “InstallerExo” system: an industrial exoskeleton providing both lower and upper body assistance for installation and maintenance tasks. Such a system would integrate lower-body support for KTS standing transitions, upper-body lifting assistance, and operation in constrained spaces. Target specifications could include a lightweight construction of approximately 40 kg, operational endurance of 3.5–7.5 hours, and incorporation of lone-worker sensing for safety. Development could be structured into modular work packages, including dedicated lower-body and upper-body assistive modules, sensing and control integration, and phased testing. This type of application-oriented design exemplifies how advances in actuation, lightweighting, sensing, and user-centred ergonomics outlined in this review can be translated into deployable, task-specific exoskeleton solutions.
Conclusions
Exoskeletons are machines or robotic devices used to enhance human physical performance, with applications including rehabilitation, enhanced strength and endurance, ergonomic support/injury protection, training, mobility, and operation in diverse environments. Exoskeletons can be classified based on various criteria, including their intended use, design aspects, and actuation systems. Various body parts can be actualized using exoskeletons such as arms, the back, legs, hands, the lower body, and the upper body, and diverse motions and functionalities have been demonstrated, including kneeling to standing, sitting to standing, extended reach, and grip. Exoskeletons offer many potential benefits. In the conceptual design of InstallerExo, these principles translate into a modular industrial exoskeleton that combines lower-body support for kneeling-to-standing transitions with upper-body assistance for installation and maintenance tasks in constrained spaces, while emphasizing lightweight construction, integrated sensing and control, and operational endurance. However, ethical frameworks are necessary to ensure equitable access, user safety, and responsible deployment. Integration of cognitive neuroscience and robotics technologies can be expected to lead to machines that learn, adapt, and interact in increasingly human-like ways. Limitations in sensor technologies and control affect the stability, comfort, and overall user experience of exoskeletons. However, advances in sensors, sensor fusion, and control algorithms provide significant prospects for improvement across all areas of functionality.
Footnotes
Acknowledgements
This research received no specific grant from any funding agency in the public, commercial, or not-for-profit sectors.
Consent to participate
Ethical approval and informed consent were not required for this study as it is a review of previously published literature and does not involve any new studies with human or animal participants.
Author Contributions
All authors contributed to the study conception and design. All authors participated in the literature review, manuscript writing, and the creation of images and tables. The initial draft was collaboratively written, and all authors reviewed and commented on subsequent versions. All authors have read and approved the final manuscripts.
Funding
This study presents a preliminary research of the 2025 University Undergraduate Teaching Reform Project at Guangdong University of Technology, entitled “AI-Empowered Curriculum Reconstruction and Design Practice Exploration in Human Factors Engineering.”
Declaration of Conflicting Interests
The authors declared the following potential conflicts of interest with respect to the research, authorship, and/or publication of this article: Peter Childs and Yixin Zou are members of the editorial board. However, these authors did not participate in the peer review process of this manuscript. We hereby declare that there are no conflicts of interest.
Data Availability Statement
Data sharing is not applicable to this article as no new datasets were generated or analysed during the current review.
{kind=link}