
Abstract
Path planning algorithms determine the performance of the ambient intelligence navigation schemes in autonomous mobile robots. Sampling-based path planning algorithms are widely employed in autonomous mobile robot applications. RRT*, or Optimal Rapidly Exploring Random Trees, is a very effective sampling-based path planning algorithm. However, the RRT* solution converges slowly. This study proposes a directional random sampling-based RRT* path planning algorithm known as DR-RRT* to address the slow convergence issue. The novelty of the proposed method is that it reduces the search space by combining directional non-uniform sampling with uniform sampling. It employs a random selection approach to combine the non-uniform directional sampling method with uniform sampling. The proposed path planning algorithm is validated in three different environments with a map size of 384*384, and its performance is compared to two existing algorithms: RRT* and Informed RRT*. Validation is carried out utilizing a TurtleBot3 robot with the Gazebo Simulator and the Robotics Operating System (ROS) Melodic. The proposed DR-RRT* path planning algorithm is better than both RRT* and Informed RRT* in four performance measures: the number of nodes visited, the length of the path, the amount of time it takes, and the rate at which the path converges. The proposed DR-RRT* global path planning algorithm achieves a success rate of 100% in all three environments, and it is suited for use in all kinds of environments.
Keywords
Introduction
Autonomous mobile robots (AMR) are employed in a wide variety of applications, including agricultural [10], hazardous situations [34], medical [30], industrial automation [2], home automation [27,36], route guidance [1] and emergency management applications [5]. Recently, mobile robotics have been utilized to monitor patients’ fevers, disinfect floors with UV light, and transport medications and food to patients in hospitals during the coronavirus 2019 (COVID-19) pandemic to prevent disease spread [37]. These applications can be carried out with the assistance of these autonomous mobile robots, which are rising in popularity. Path planning is critical in AMR because it enables the robot to identify obstacles and follow the collision-free path from its starting place to its destination via a specified number of intermediate points [3]. Autonomous mobile robot path planning based on sampling techniques is the most significant improvement in the path planning segment [11]. The primary advantages of these algorithms are their low computational cost, their applicability to high-dimensional problems, and their increased success rate for advanced problems [23]. These algorithms are probabilistic complete, which indicates that they will find an answer if one exists given an unlimited run time. If there is enough time, these algorithms’ probabilistic completeness properties will eventually find a solution. The Probabilistic Roadmap (PRM) and the Rapidly Exploring Random Tree (RRT) are two of the most popular sampling-based path planning techniques. In this PRM [14], a roadmap is built by repeatedly sampling the configuration space (also known as C-space). The free-space samples are saved, but the obstacle-space samples are deleted from the roadmap. Since PRM and its variants are multi-query methods, they are incompatible with real-time applications that require preprocessing to develop a roadmap. For single-query concerns, RRT is faster than PRM [28]. RRT is a tree-type method that constructs a tree from the initial configuration to the final configuration [17]. It picks a random configuration from the C-space and tries to connect to the nearest vertex in the tree if it is in the free space. However, the solution provided by RRT is suboptimal. Asymptotically optimum solutions are found using RRT*, an RRT extension [13]. The major limitation of the RRT* algorithm is the slow convergence problem. Because of its popularity, there have been a lot of RRT * algorithms made to solve RRT *’s slow convergence problem and they are compiled in the review papers with their relevant applications [4,6,25,26]. Despite various extensions in RRT*, due to uniform sampling of the entire configuration space [20], the RRT* path planning algorithm suffers from slower convergence [21]. There are two ways to improve the slow convergence problem of the RRT* path planning algorithms: changing the sampling procedure [15] and improving the initial path [12,33]. Sampling-based path planning algorithms depend on a well-designed sampling technique, modification of the sampling procedure is considered in the research work out of these two methodologies. Sampling procedures in RRT* play an important role in exploring the search space. Uniform and non-uniform sampling or informed sampling, are two different kinds of sampling. RRT*’s convergence is improved by reducing the search space by using a non-uniform sampling approach. Non-uniform sampling is distinguished from uniform sampling by the fact that some points in the search space are given greater weight and have a larger likelihood of being sampled than others. The study of the impacts of non-uniform sampling in RRT* in comparison to uniform samples is a recent topic [22]. Investigation of non-uniform sampling in RRT* is reviewed by Veras, Medeiros and Guimaraes [31]. In general, two distinct strategies are used to accomplish the non-uniform sampling process in RRT*. The first strategy of the uniform sampling technique is referred to as biased sampling, in which RRT* expansion is skewed regionally to acquire samples in and surrounding regions of interest. Adaptive sampling is the second strategy that limits the RRT* search space during the sampling phase. A non-uniform distribution biases the sampling process in RRT* and decreases the number of samples necessary to find a path. These techniques can be used individually or in combination with uniform sampling. However, non-uniform sampling is frequently used in combination with a uniform sample to ensure success.
Related work
In standard RRT*, uniform random sampling is used to generate a tree. One option to improve the sampling technique in RRT* is to introduce bias [19]. For quick convergence, a P-RRT* based on an artificial potential function [24] is proposed. It employs a random gradient descent heuristic in which the sampling process is driven by an Artificial Potential Field (APF). The Artificial Potential Field (APF)-based methods that are used to bias the RRT* exploration use information about the links between the goal and the obstacle. Between the new sample and the goal, an attractive force converges the solution more quickly than the RRT* sampling process. Then, to further improve sampling efficiency, the artificial potential function-based RRT* is extended bidirectional operation, which is referred to as PB-RRT* [29]. Later on, BPIB-RRT* is proposed as a biased potentially guided intelligent bidirectional RRT* that incorporates biased sampling and artificial potential fields [35]. In more complex environments, artificial potential fields may become trapped at a local minimum solution. Additionally, because of the fixed attractive pole, the tree may grow in the wrong direction, resulting in undesired exploration and performance degradation. The primary issue with the biasing technique is that it becomes too greedy, resulting in a problem of local minima [18]. Another option to improve the sample operation in RRT* is to impose limitations on the sampling space. Through a simple hyper-ellipsoid and a direct bounded sampling method, informed RRT* [7] obtains samples from the configuration space. The Wrapping-based Informed RRT* (WIRRT*) [16] is a modified version of the Informed RRT* that incorporates a wrapping method to accelerate the decrease of the ellipsoidal region that constrains the sample space. Wrapping enhances the performance of a planned path by substituting for intermediate nodes that are wrapped around obstacles. However, informed RRT* base path planning algorithms determine the initial path using RRT*’s uniform sampling approach, so it traverses the whole configuration space to arrive at the optimal path. Hence, an alternative to RRT* path planning algorithms is required for quickly determining the initial path. A Directional RRT* (D-RRT*) path planning algorithm [8] is proposed to find the initial solution using an elliptic created between the start and goal configurations. Even though it outperforms RRT* and Informed RRT* in a cluttered environment, its success rate is very low in a maze and narrow passage environment since it is based only on non-uniform sampling. To address this issue, non-uniform D-RRT* is extended by combining it with uniform sampling known as DR-RRT*, a modified Directional Random-RRT* framework proposed in this paper. A random method is used to combine the non-uniform directional sampling method with uniform sampling [32].
The remainder of the paper is organized as follows. The problem statement is defined in detail in Section 3. Section 4 introduces the proposed DR-RRT* Algorithm. Section 5 covers the AMR simulation results and discussions in three different environments. The real-time implementation is discussed in Section 6. In Section 7, the conclusion and possible future research topics are presented.
Problem definition
Consider a configuration space (C-space)
Directional Random – RRT*
In the proposed DR-RRT*, a non-uniform directional sampling method combines with uniform sampling using a simple random selection method. Section 4.1 explains the non-uniform directional sampling method and the proposed DR-RRT* framework is discussed in Section 4.2.
Directional sampling method
The main objective of the Directional Sample is to minimize the sample space by focusing on the direction of the starting configuration to the goal using a simple elliptical heuristic generated between

Ellipse construction in directional sample method.
Algorithm 1 explains the pseudocode for the ‘
Primitive procedures for the ‘

Even though standalone non-uniform directional sampling performance is good in cluttered environments, it fails to build the path in narrow and maze environments since it relies on the elliptical heuristic. So, the proposed DR-RRT* framework combines the non-uniform directional sampling approach with uniform sampling using a simple random selection method. The pseudocode that explains the DR-RRT* framework is given in Algorithm 2. A simple random selection condition
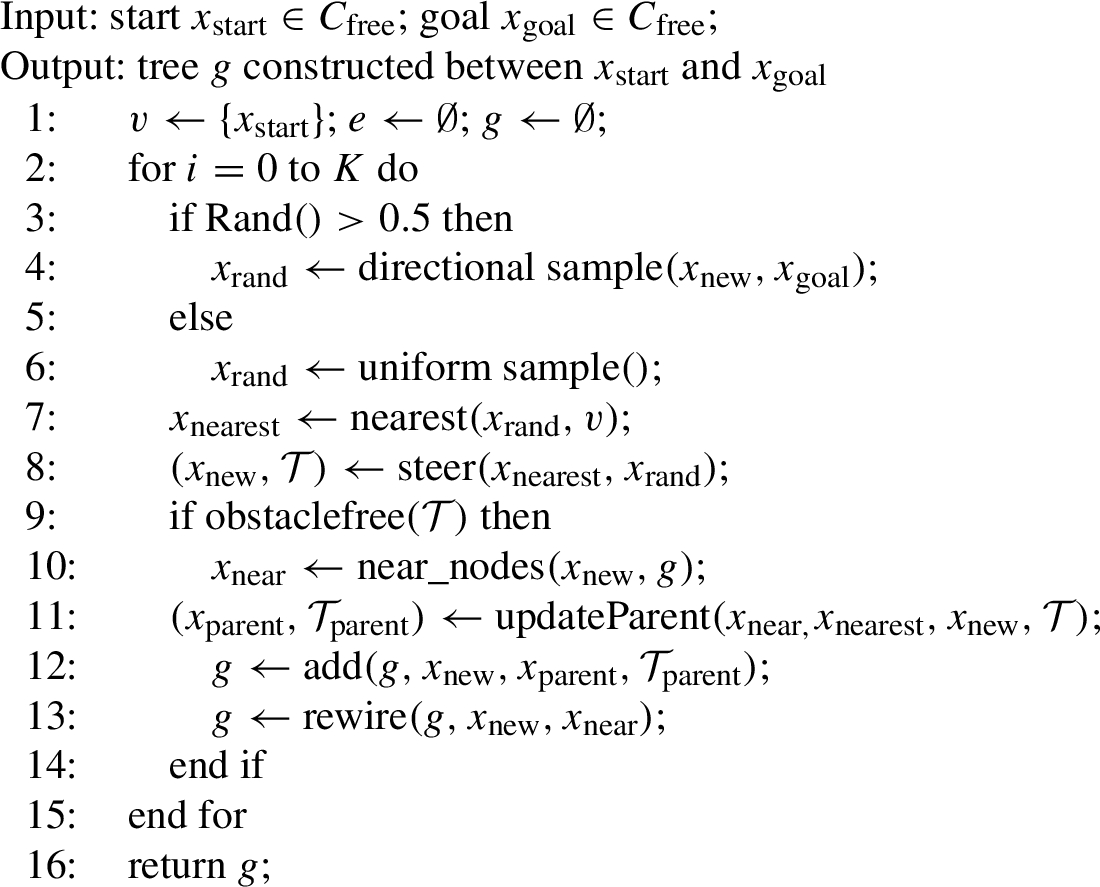
DR-RRT* framework
Algorithm 3 details the proposed DR-RRT*’s ‘

Algorithm 4 details the ‘

Finally, the DR-RRT* creates a tree
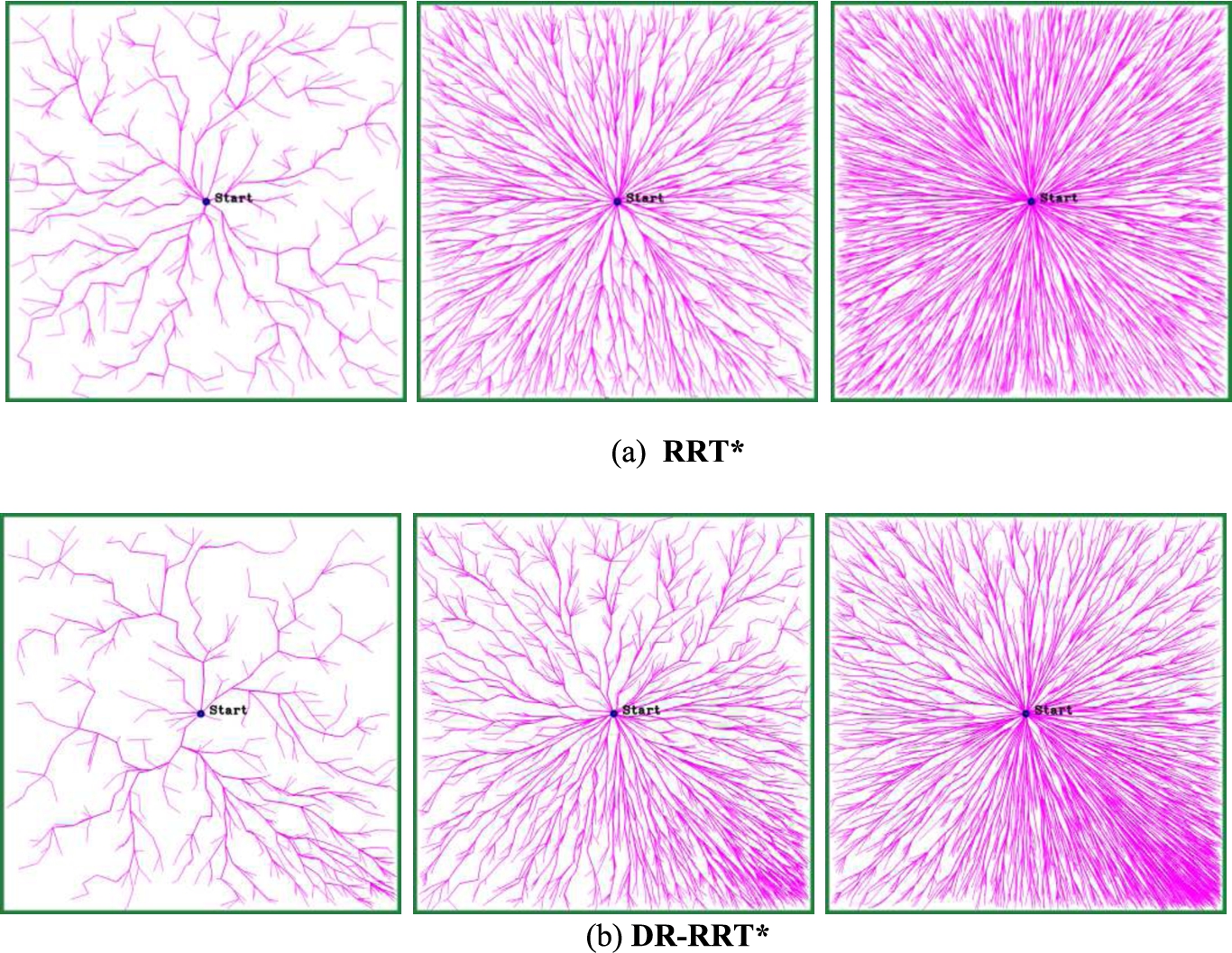
Tree pattern (a) RRT* and (b) DR-RRT* after 1000, 5000, and 10,000 iterations.
Probabilistic completeness is guaranteed by the proposed DR-RRT* algorithm. For each given path planning problem
Since the DR-RRT* path planning algorithm returns a connected graph for all kinds of considered environments, it follows the RRT*’s probabilistic completeness. □
This section illustrates the proposed DR-RRT* algorithm’s space and time complexity using big O notation. The terms “space complexity” and “time complexity” refer to the amount of space and time required by the given path planning algorithm. Given two functions
Time complexity analysis
The time complexity of any procedure is defined by the number of procedure calls made to it.
Let the number of procedure calls made by the given path planning algorithm to the
Let As a result,
The word “space complexity” relates to the path planning algorithm’s memory requirements. DR-RRT* generates a tree
For the proposed DR-RRT* path planning algorithm, the size of the tree As a result,
The proposed DR-RRT* path planning algorithm is compared to the existing RRT* and Informed RRT* algorithms using a
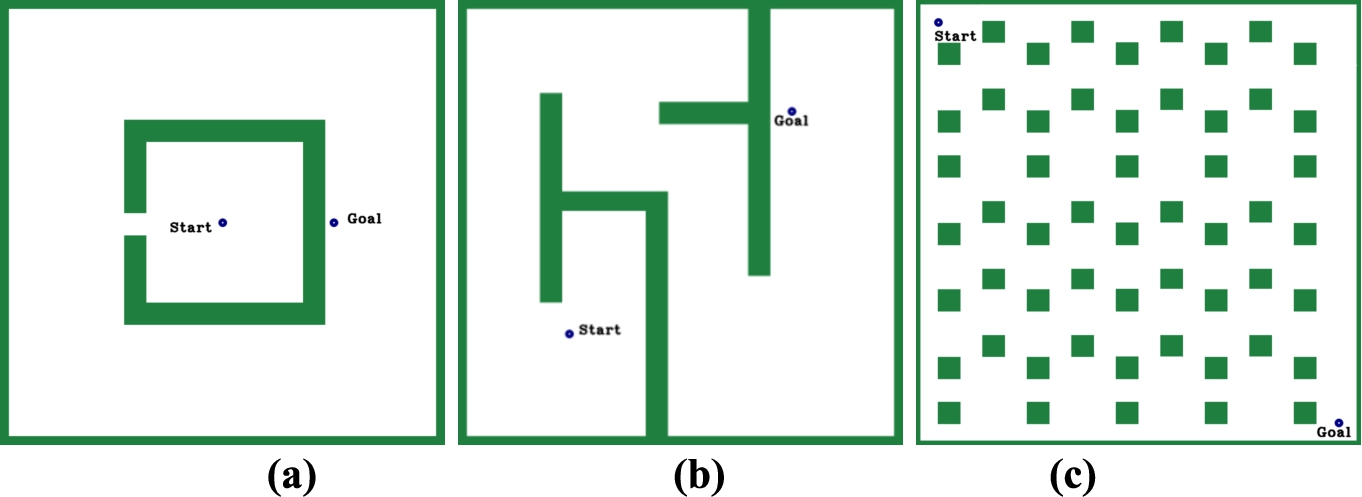
Environments: narrow (a), maze (b), and cluttered (c).
Figure 4 illustrates the path generated by the proposed DR-RRT* using all three environments with a total of 10,000 samples. The samples generated by the proposed DR-RRT* path planning algorithm generate more samples directed toward the goal by visiting a few nodes.
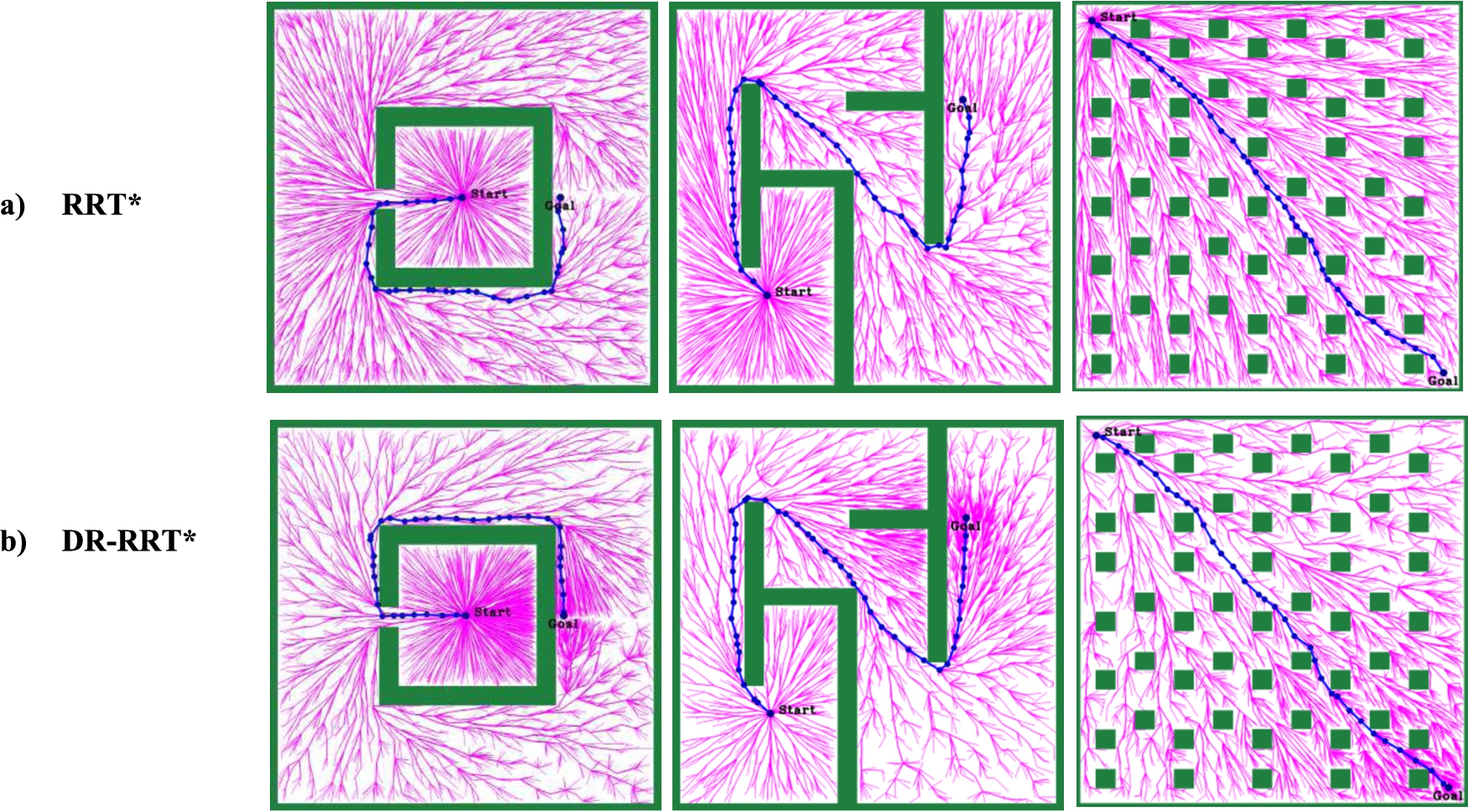
Path generated by (a) RRT* and (b) DR-RRT* with 10,000 samples.
Statistical information about the performance measurement planning time t, the initial cost solution
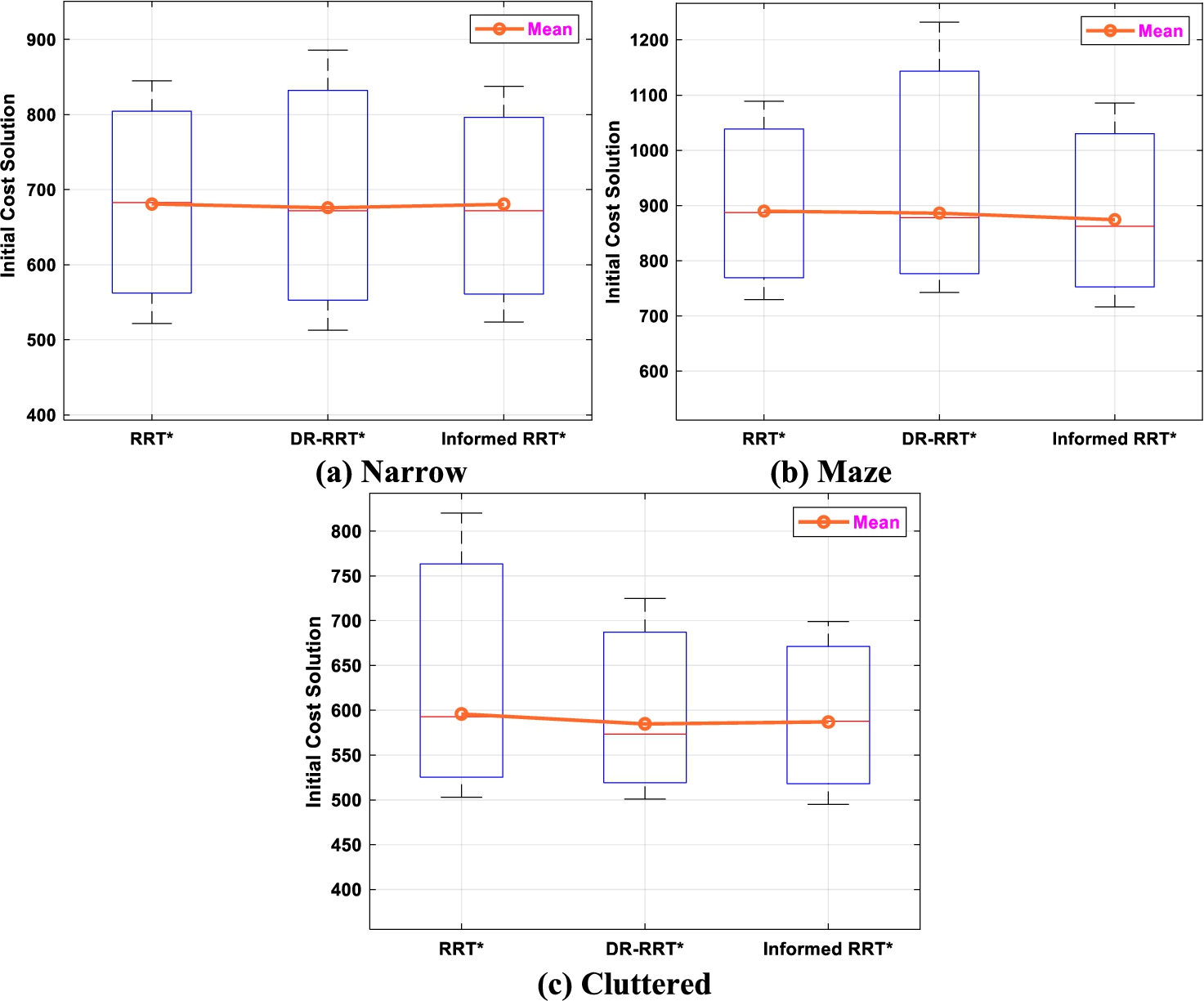
Initial cost-performance comparison of the DR-RRT* with popular algorithms
Time performance comparison of the DR-RRT* with popular algorithms
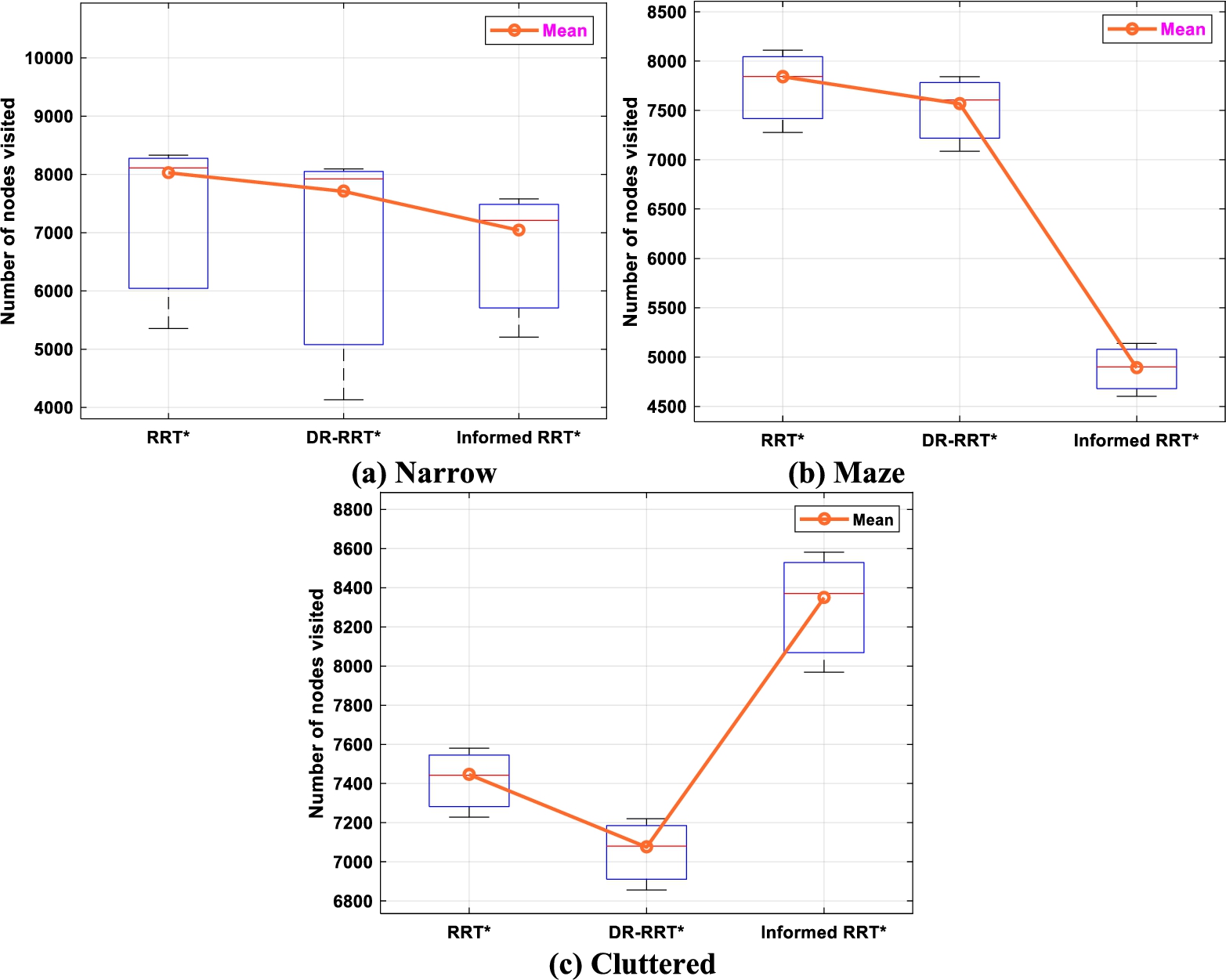
Nodes visit performance comparison of the DR-RRT* with popular algorithms
The boxplot in Fig. 5 illustrates the initial cost solution performance of the proposed DR-RRT* in the three different environments. It improves the initial cost performance by about 1%. The boxplot in Fig. 6 illustrates the time performance of the proposed DR-RRT* in the three different environments. Due to the combination of uniform and non-uniform sampling techniques, the proposed DR-RRT* takes a longer planning time than RRT*. However, the proposed DR-RRT* time performance is faster than Informed RRT* by 53%.
Initial cost performance.

Time performance.
Number of nodes visited performance.
The boxplot in Fig. 7 illustrates the node visiting a performance of the proposed DR-RRT* in the three different environments. The proposed DR-RRT* visits lesser nodes than RRT*. However, the proposed DR-RRT* visits more nodes than Informed RRT*. Even though Informed RRT* visits fewer nodes than DR-RRT* in the maze and narrow environments. In the cluttered environment, it explores 18 % of the nodes more than the proposed DR-RRT* path planning algorithm. Moreover, the proposed DR-RRT* achieves a 100% success rate in all three different environments, whereas previous D-RRT* path planning algorithms cannot achieve the 100% result in maze and narrow environments.
The proposed DR-RRT* path planning algorithm is also evaluated using the convergence rate parameter. The convergence rate is defined as
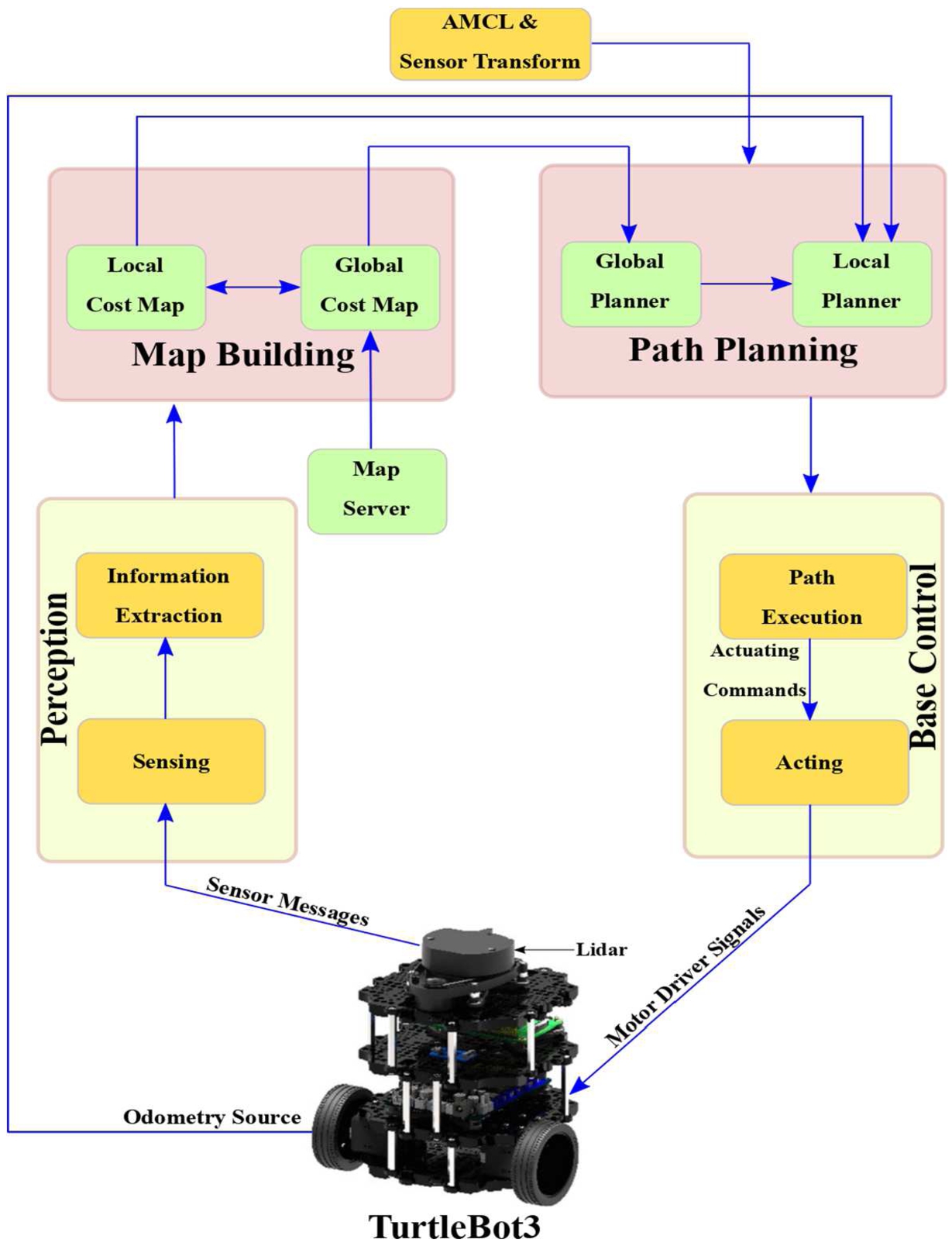
Ambient intelligent navigation architecture
The proposed DR-RRT* path planning method is implemented as a global planner using an ambient Intelligent navigation architecture shown in Fig. 9. The ambient Intelligent navigation scheme moves the robot from the start point to the goal point on the map using the robot’s sensor data with directional information. The modules of the ambient Intelligent navigation architecture are outlined here. The perception module is responsible for sensing the robot’s status as well as its surroundings, which is performed by collecting raw data from sensors such as the 2D-LiDAR and Inertial Measurement Unit (IMU). The localization module uses a variety of approaches to detect where the robot is in the environment and what data it is receiving from the robot’s exteroceptive sensors. The path planning module is responsible for calculating a feasible path from the beginning location to the destination point while avoiding obstacles. The microcontroller, which sends control signals to the motors via drives, regulates the mobility of the mobile robot via the motion control module.
Real-time implementation
The proposed path planning algorithm is implemented on the TurtleBot3 robot in a real-time laboratory environment shown in Fig. 10 using the ROS Melodic. Using sensor data, the Turtlebot3 robot goes from the starting place to the stated destination location on the map. The Simultaneous Localization and Mapping algorithm [9] is used to generate a 2D map using 2D LiDAR and odometry data. The size of the map, which measures 384 by 384 pixels with a resolution of 0.05 pixels/m, is utilized to validate the proposed algorithm. The proposed DR-RRT* path planning method is implemented as a global path planner, while a Dynamic-Window Approach is utilized as a local path planner to account for dynamic obstacles. The global path plan generated using the proposed DR-RRT* path planning algorithm is visualized using the Rviz tool as shown in Fig. 11. Table 5 shows statistical data for the proposed DR-RRT* performance measure in a real-time laboratory environment using popular algorithms. The proposed DR-RRT* path planning algorithm outperforms both RRT* and Informed RRT*.
Convergence rate comparison of the DR-RRT* with popular algorithms
Convergence rate comparison of the DR-RRT* with popular algorithms

Convergence rate performance.
Navigation architecture.

A real-time environment map.
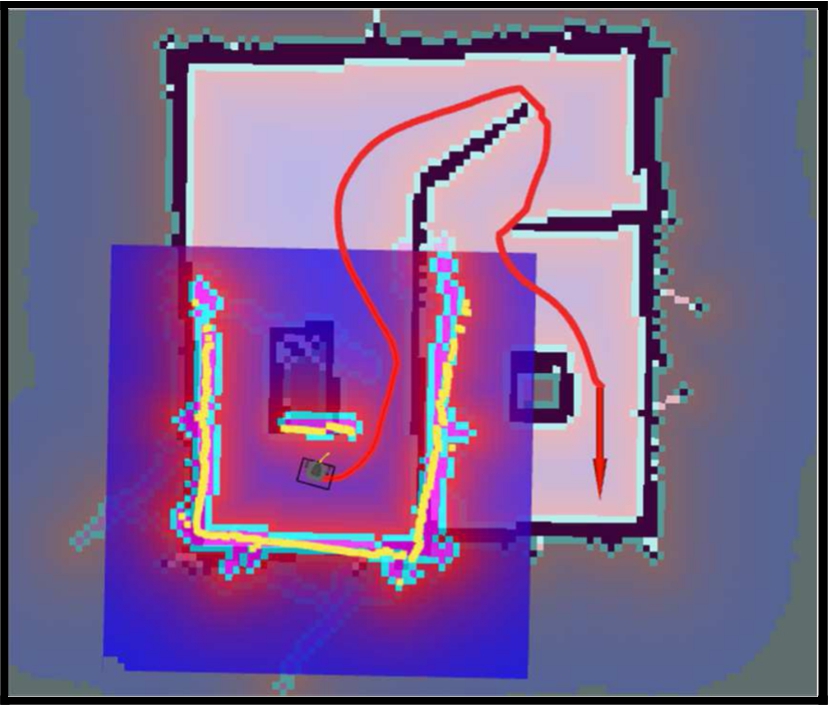
TurtleBot3 navigation in Rviz.
Performance comparison of the DR-RRT* with popular algorithms
RRT* is the optimal path-planning algorithm among sampling-based algorithms, but it suffers from a slow convergence problem. To overcome this issue, this article proposed a directional RRT* algorithm for autonomous mobile robots called DR-RRT*. The proposed DR-RRT* combines the advantages of non-uniform and uniform sampling in the RRT* path planning algorithm. The proposed DR-RRT* path planning algorithm is evaluated in the gazebo simulation using a TurtleBot3 robot with three different 2D maps namely, narrow, maze, and cluttered environments. Four different parameters such as the number of nodes visited, initial cost, time, and convergence rate are used to evaluate the proposed DR-RRT* path planning algorithm. The overall performance of the proposed DR-RRT* path planning algorithm is superior to the standard RRT* and Informed RRT* path planning algorithm in the cluttered environment. The proposed DR-RRT* path planning algorithm improves the initial cost performance by about 1% and it is 53% faster than Informed RRT* in the cluttered environment. In the cluttered environment, it explores 18 % of the nodes more than the proposed DR-RRT* path planning algorithm. Moreover, the proposed DR-RRT* achieves a 100% success rate in all three different environments, whereas previous D-RRT* path planning algorithms cannot achieve the 100% result in the maze and narrow environments. Thus, the proposed DR-RRT* path planning algorithm is suitable for all kinds of environments. The proposed research framework is also validated in a real-time laboratory environment using the TurtleBot3 robot as a global planner, and it can be extended as a local planner. The proposed DR-RRT* path planning algorithm can be used in any real-time autonomous mobile robot navigation application, such as warehouses for industrial material handling. In addition, the proposed research can be extended with path optimization methods to refine the generated path in real-time applications.
Conflict of interest
None to report.