Consider the eigenvalue problem generated by a fixed differential operator with a sign-changing weight on the eigenvalue term. We prove that as part of the weight is rescaled towards negative infinity on some subregion, the spectrum converges to that of the original problem restricted to the complementary region. On the interface between the regions the limiting problem acquires Dirichlet-type boundary conditions. Our main theorem concerns eigenvalue problems for sign-changing bilinear forms on Hilbert spaces. We apply our results to a wide range of PDEs: second and fourth order equations with both Dirichlet and Neumann-type boundary conditions, and a problem where the eigenvalue appears in both the equation and the boundary condition.
Heat conduction and vibrational modes of inhomogeneous materials are modeled by the weighted eigenvalue problem , where λ is an eigenvalue and b is a positive weight function representing a pointwise heat capacity or mass density. When b is allowed to change sign, new phenomena emerge modeling ecological population dynamics in the presence of a favorable (), neutral (), or unfavorable () food source (see the introduction of the monograph by Belgacem [7]). Much of the intuition and many of the techniques used to study the spectrum and eigenfunctions are no longer applicable. In particular, these sign-changing problems typically have a discrete spectrum of eigenvalues that accumulate at both and , in contrast with the positive weight case.
In this paper we investigate the singular “large negative weight limit” of such eigenvalue problems first in the Hilbert space setting and then applied to a variety of partial differential equations. Roughly speaking, we show that if is a nonnegative weight then the eigenvalues of the problem with weight converge as to those of an eigenvalue problem on the subregion with weight b and mixed boundary conditions. For example, the positive eigenvalues of the Neumann problem
converge, as , to the positive eigenvalues of the mixed boundary value problem
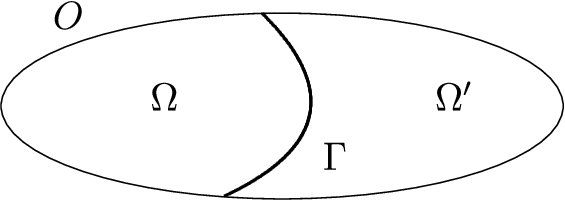
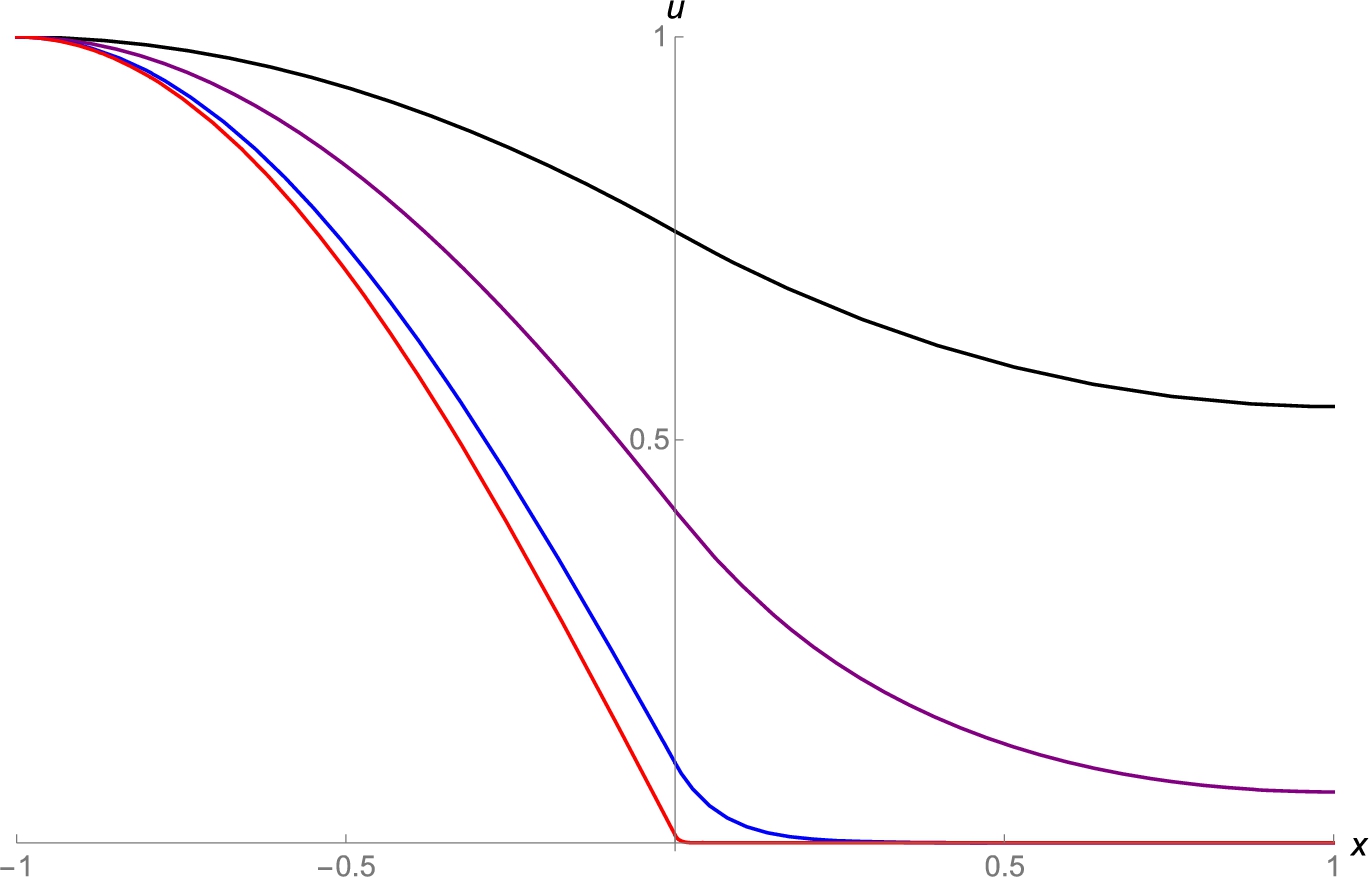
where Γ is the hypersurface that forms the interface between the set and its complement (see Fig. 1). The key to establishing the convergence is an “-draining” inequality, as explained in Remark 6.4. This implies the eigenfunctions converge weakly to zero in as , and therefore, the limiting eigenfunction is supported in Ω (see Fig. 2).
The domain O, with subregions and , and interface Γ. See Section 3.1 for precise definitions.
The -normalized eigenfunction corresponding to the first positive eigenvalue of the Neumann problem (1) with domain and weight , plotted for . The values are decreasing with increasing t-values. The eigenfunctions have the form on and on . Observe that u approaches zero on so that the eigenfunctions acquire Dirichlet boundary conditions on in the limit.
We are primarily concerned with singular limits of sign-changing eigenproblems. We formulate and prove our results in a general Hilbert space framework, as developed by Auchmuty [1]; see also [3]. (A formulation in terms of compact operators may also be possible.) In Section 3 we apply our singular limit convergence theorems to various PDE eigenvalue problems (summarized in Table 1). Among others, our results cover some fourth order equations involving the bi-Laplacian and problems with a variety of boundary conditions, and a problem where the eigenvalue appears both in the equation and the boundary condition.
In particular, our results apply to problems that are not coercive. For example, the left side of the above Neumann problem (1) is generated by the -norm of the gradient, which is not coercive on . In positively weighted problems, there are various ways around this lack of coercivity, but many of these techniques fail or are more complicated when the weight changes sign.
In Section 4 we apply our results to a weighted version of the traditional matrix eigenvalue problem, known as a matrix pencil: . In this setting we are able to give a complete description of the behavior of the spectrum as . Sections 5 and beyond are devoted to proofs of the main results and applications.
Motivation
Positive eigenfunctions of the weighted Laplacian can be interpreted as a population densities, because the eigenproblem is the linearization of the steady-state of a nonlinear model for population dynamics (see the introduction of [7]). From this perspective, our limit of eigenproblems can be interpreted as the limit of ecological models in which the food source (the weight) becomes arbitrarily unfavorable (negative) on some subregion. In ecology, Dirichlet boundary conditions are known as “hostile” boundary conditions. Our results make rigorous the following heuristic: a region with arbitrarily unfavorable food source creates a hostile boundary at its interface with the complementary region. This heuristic is analogous to how a Dirichlet boundary condition for a Schrödinger eigenproblem can arise from deeper and deeper potential wells converging to an infinite potential well.
Literature
Recently, a special case of the aformentioned convergence as for the Neumann problem (1) was established by Mazzoleni, Pellacci, and Verzini to study optimal design problems [20, Lemma 1.2], [21]. This convergence allowed them to transfer information about optimizers from the mixed Dirichlet–Neumann problem (2) to the Neumann problem (1) for large t. In addition to this optimal design result, there has been work on extremizing the first positive and negative eigenvalues over weights with constraints on the extreme and average values. This problem was investigated by Cox [8] for the Dirichlet Laplacian with positive weights, for the Neumann Laplacian by Lou and Yanagida [18], for a nonlinear Neumann Laplacian problem by Derlet, Gossez, and Takáč [9], and for the Robin Laplacian by Lamboley et al. [16]. The resulting extremizers are often of bang-bang type, meaning their range consists only of the extreme values.
Recently, other phenomena have been studied for problems with sign-changing weights. The analog of the Weyl asymptotic holds for the eigenvalues of the Laplace-Beltrami operator with a sign-changing weight was established by Bandara, Nursultanov, and Rowlett in [4]. Their results hold for rough Riemannian manifolds, that is, Riemannian manifolds with metrics that are only assumed to be bounded and measurable. In a nonlinear setting, Kaufmann, Rossi, and Terra [15] studied limits of the p-Laplacian eigenvalue problem with a sign-changing weight as p tends to infinity. They showed that the asymptotics of the positive eigenvalues are controlled by the geometry of the set where the weight is positive, which generalized results from the unweighted setting.
Main results
Conditions for convergence of spectrum
The set-up for our main results consists of a Hilbert space with norm , three symmetric bilinear forms , and the family of bilinear forms given by
The associated quadratic forms are
In what follows we allow to be a sign-changing function, but impose that
We seek solutions to the eigenequation
Call the eigenvalue and the eigenvector.
We denote this problem by the triple and will define other eigenvalue problems using the same “space-form-form” triple notation. For example, the weak formulation of the weighted Dirichlet or Neumann Laplacian eigenvalue problem is generated by taking or , , and with as in (1). In what follows we define the kernel of a bilinear form to be
To identify the appropriate limiting problem as let
Observe that is “stationary” on in the sense that on for all t. We show that, in a certain sense, the eigenvalues of the problem converge to those of the limiting problem as .
Two sets of conditions will give rise to two versions of this limiting statement. The Dirichlet and Neumann Laplacian eigenvalue problems are model problems for these sets of conditions, respectively. The first set of conditions is:
is a coercive on , meaning for some .
is continuous on .
and are weakly (sequentially) continuous on .
In condition (C3), a bilinear form is weakly sequentially continuous if whenever and , where “⇀” denotes weak convergence in . In what follows we will say “weakly continuous” in place of “weakly sequentially continuous” for brevity.
Note that and being weakly continuous on is, in fact, a stronger condition than them simply being continuous. This follows from the fact that if and are norm convergent in the Hilbert space with limits u and v, then and , so that .
Condition (C1) is designed to handle problems that are coercive on all of . To handle problems that fail to be coercive on a finite dimensional subspace (such as the Neumann Laplacian, whose associated bilinear form annihilates the constants), we now develop a variant of (C1). The condition is:
is coercive on , with , and ,
where and ⊥ denotes the orthogonal complement with respect to the -inner product.
The second set of conditions is then (C1′) together with (C2) and (C3) from above, and in this case, we restrict the problem to the “moving” Hilbert space
The spaces should be thought of as the -orthogonal complement of for each . In this “moving” setting we prove that the eigenvalues of , and therefore the nonzero eigenvalues of , converge to those of the limiting problem .
In our PDE applications, is some finite dimensional subspace of the polynomials, and the coercivity condition in (C1′) is established by a generalization of the Poincaré inequality for mean zero functions. For example, in the Neumann Laplacian case, consists of the constants, and the “moving” Hilbert space consists of functions u satisfying .
The following terminology will distinguish the above two cases:
We call conditions (C1)–(C3) the fixed Hilbert space conditions and conditions (C1′), (C2), (C3) the moving Hilbert space conditions.
Existence of spectrum
When (C1) and (C2) hold, the bilinear form induces an inner product on that is equivalent to the -inner product. Let denote the -orthogonal direct sum. The following theorem is a consequence of existence results due to Auchmuty [1]:
(Existence of spectrum).
Assume that. Ifsatisfies (C1), (C2), and (C3) then there exists a (possibly finite) sequence of nonzero eigenvalueswhich have finite multiplicity and accumulate only at. Moreover, we have the decompositionwhereis the norm closed span of the eigenvectors with positiveor negativeeigenvalues and.
Application to
When for all t, applying Theorem 2.2 with instead of immediately gives existence of spectrum for in the fixed Hilbert space case and with and instead of and gives existence of spectrum for in the moving Hilbert space case (since is coercive on by Lemma 5.5 when is large). In the latter case, Lemma 5.6 shows that has the same spectrum as up to zero eigenvalues when is large. See point 1 of the discussion at the end of this section for further explanation of the hypothesis on t in the moving case.
Note that for at most one , say , since . In this case, and each eigenvalue of is simply a times an eigenvalue of when .
In what follows let denote, respectively, the number of positive and negative eigenvalues of the limiting problem . For each , write
for the jth positive (+) or negative (−) eigenvalue of counting multiplicity. These eigenvalues satisfy the eigenequation (3) for some corresponding eigenvectors .
Convergence of spectrum
The first of our main results accounts for all the positive eigenvalues as of via the dichotomy: if exists then converges to it; otherwise tends to . In what follows, we will write as to mean: as , and either is increasing for all (in the fixed Hilbert space setting) or increasing for all t sufficiently large (in the moving Hilbert space case). We will use “↗” similarly when t increases to a finite value. The notation “↘” is also defined analogously. How large t must be only depends on , , , and (see Lemma 5.2 and Remark 5.3).
(Convergence and blow-up of positive spectrum as ).
Assume either the fixed or moving Hilbert space conditions hold.
Ifthenas.
Ifandexists for some(sufficiently large in the moving Hilbert space case) thenasfor some.
Observe that when , means and part (ii) is vacuous. For matrix pencils, the blow-up of eigenvalues in part (ii) of the theorem and related phenomenon can be seen in Fig. 3 and are proven in Theorem 4.1.
In the moving Hilbert space setting define
and note that is a closed subspace of by Lemma 5.1, where we also find an explicit characterization of . In the next proposition, let denote the codimension of as a subspace of , and denote the codimension of as a subspace of .
(Convergence of negative spectrum as ).
If the fixed Hilbert space conditions hold thenexists for all sufficiently large t and increases to zero as, for each. If the moving Hilbert space conditions hold thenexists for all sufficiently large t and tends to zero as, for each.
Recall that a Riesz representation argument shows that for a bounded symmetric operator since is norm continuous by Remark 2.1. Combining this with the above proposition shows that -many negative eigenvalues of increase to zero in the fixed Hilbert space case.
Applying the above two results as , we have the following convergence statements:
(Convergence of spectrum as ).
Assume either the fixed or moving Hilbert space conditions hold with t sufficiently negative in the moving case.
Ifthenas.
Ifandexists for some(sufficiently negative in the moving Hilbert space case) thenasfor some number.
exists for sufficiently negative t and tends to zero as, forin the fixed Hilbert space case and forin the moving Hilbert space case.
Discussion
1. Although our results concern the whole spectrum of indefinite problems, the behavior of low eigenvalues guide our approach to problems that fail to be coercive such as the Neumann problem (1). In the moving Hilbert space case, when is small it is possible for a negative eigenvalue to increase through zero and become positive as t increases. This causes the jth eigenvalue to have a jump discontinuity and decrease, before it increases again. This phenomena illustrates why we restrict to t sufficiently large to prove the jth eigenvalue is monotone in t and for to be coercive on .
In particular, the principal eigenvalue (the one with a positive eigenfunction) of the Neumann problem (1) has a sign that is the opposite of the sign of (see [7, Corollary 2.2.8]). For an eigenvalue problem coming from a parabolic equation with dynamical boundary conditions (see Table 1), Bandle, von Below, and Reichel [5, Theorem 21] proved that there is a smooth curve of principal eigenvalues that passes through zero as t (a parameter in the boundary condition) is varied.
Under suitable assumptions on the domains and weights, as explained in Section 3.1, the eigenvalues of (the weak formulations of) each approximating problem converge (with multiplicity) to those of the corresponding limiting problems by Theorem 2.3. In the limiting problems, . In the Schrödinger operator example, we take to be nonnegative. In the free bi-Laplacian example, the boundary operators are and , where is the operator that projects a vector at onto the tangent space of at y
Approximating problem
Limiting problem
Schrödinger operator (), Dirichlet Laplacian ()
Robin Laplacian ()
Clamped bi-Laplacian ()
Neumann Laplacian
Free bi-Laplacian ()
Laplacian with dynamical boundary conditions
2. Convergence Theorem 2.3 shows that each positive eigenvalue of the limiting problem is obtained as a limit of approximating eigenvalues, but for the negative eigenvalues, Proposition 2.4 says only that some of them tend to zero. It does not assert that the remaining negative eigenvalues tend to the negative spectrum of the limiting problem. Although in finite dimensions, the remaining negative eigenvalues do converge to the negative spectrum of the limiting problem, by Proposition 4.1 below, but in infinite dimensions the situation can be more complicated.
For example, Proposition 2.4 implies when is infinite that tends to zero for every , making it difficult to imagine in what sense the negative spectrum of the approximating problem could be said to converge to the negative spectrum of the limiting problem. The problem is seen particularly clearly for a 1-dimensional Sturm–Liouville problem with Dirichlet boundary conditions when b and c are continuous. In this case, the spectrum consists of simple eigenvalues for each t even when changes sign (see [14, Section 10.72] or [19, Theorem B]) and Proposition C.1 implies that is a continuous curve of eigenvalues in the -plane. Therefore, each curve of negative eigenvalues cannot cross and must tend to zero. In what sense (if any) could these eigenvalues be said to approach the negative eigenvalues of the limiting Sturm–Liouville problem? Further work is needed to understand this situation.
In general, spectral curves can cross, making it possible for a curve of negative eigenvalues to converge to a negative limiting eigenvalue. In order for this to happen, the indices of the eigenvalues forming such a curve must get larger and larger as the curve is crossed by successively many eigenvalue curves tending to zero. Examples with this behavior can be constructed using diagonal operators on .
Applications to partial differential equations
Now we apply our Hilbert space convergence theorems from the previous section to prove that the spectrum of each approximating problem in Table 1 converges to the spectrum of its corresponding limiting problem, as described by Proposition 3.1. Convergence of the spectrum for the problems in the first and second halves of Table 1 is proved via the fixed and moving Hilbert space versions of Theorem 2.3, respectively. It follows from Lemma 6.3 that eigenfunctions of the approximating problems converge in Sobolev norm to corresponding eigenfunctions of the limiting problem.
Standing assumptions and definitions
First we identify the relevant spaces and and the bilinear forms , , in order to formulate each approximating and limiting problem (except for the Laplacian with dynamical boundary conditions). Let be a bounded Lipschitz domain, an integer, and where the exponent is
The forms for each problem will be given in Table 2. Using the functions b and c we define the bilinear forms
Similarly define
Assume for all x, and that
are nonempty open sets with Lipschitz boundary (as defined in [11]). In Remark 8.2 we discuss the possibility of relaxing the above hypotheses on O, Ω, and .
For each and listed below, the eigenvalues of converge to those of as described by Proposition 3.1. Here except in the dynamical boundary conditions case where . In the latter case . In the free bi-Laplacian case, is the -dimensional Hessian vector consisting of all second derivatives of u
Space
Form
Space
Schrödinger operator (), Dirichlet Laplacian ()
Robin Laplacian ()
Clamped bi-Laplacian ()
Neumann Laplacian
Free bi-Laplacian ()
Laplacian with dynamical boundary conditions
In what follows is the usual Sobolev space . Let
and let the space
where is the trace operator. Observe that is a closed subspace of since is continuous on .
We show (in Lemma 8.1) that if or then the kernel of is
consisting of the functions that vanish on . While is the correct limiting space given by the convergence Theorem 2.3, it is more natural to consider , which we define as the space of functions in restricted to Ω.
To identify the space , in Lemma 8.1 we show when or that or , respectively. Since is defined by integration in our applications, and functions in vanish on , we can restrict the integration to Ω to obtain a new bilinear form on and similarly for and . For the remainder of this section, we identify with and , , and with , , and , respectively.
For the Laplacian with dynamical boundary conditions , , and
In this case we will show that in Lemma 8.9.
It is known that can be characterized as the closure of when is sufficiently regular (see [22, Section 2.4.4]). In particular, this characterization holds for when is Lipschitz so we will write for and similarly for the spaces on O in these cases. While it seems plausible that could be constructed as the closure of , where , we will work solely with the above definition of .
PDE convergence results
Now we construct triples and as in Table 2 by making choices of the Hilbert space and a bilinear form . These triples correspond to weak formulations of the approximating and limiting eigenvalue problems for the partial differential operators considered in Table 1. Let for each . Applying our results from Section 2 to each of these triples, we obtain:
Consider as above the domains O, Ω,, the weights b, c and their associated bilinear forms,. For each problem in the first or second half of Table
2
, the fixed or moving Hilbert space conditions hold, respectively, andis the space indicated in the Table. For each:
Ifhas positive measure thenandboth exist andas.
Ifa.e. thendoes not exist, and ifexists for some(sufficiently large for the problems in the second half of Table
2
) thenasfor some.
If t is sufficiently large thenexists andas, except whenin the Dynamical Boundary Conditions problem, in which case there is a single negative eigenvalue that tends to zero as.
The proposition is proved in Section 8. Proposition 3.1 could easily be strengthened to hold for problems with more general symmetric elliptic operators, but we choose to restrict the applications to the Laplacian and bi-Laplacian for simplicity.
Application to matrix pencils and blow-up phenomenon
When is finite dimensional the eigenvalue problem is a variant of the traditional eigenvalue problem from linear algebra. In this setting we are able to obtain a complete description of the spectrum as . This example also illustrates that the range of indices for which Proposition 2.4 holds is as large as possible in the fixed Hilbert space case.
Let A, B, and C be symmetric matrices. Assume that A is positive definite, and that C is positive semi-definite, nonzero, and has a nontrivial kernel. Let and consider the matrix pencil eigenvalue problem
Denote this eigenvalue problem by the triple , where , and , , and are defined similarly. The fixed Hilbert space conditions hold and , so that is the limiting problem.
Due to the form of the eigenequation it is natural to say that has an eigenvalue-at-∞ of multiplicity when is nontrivial. We view the eigenvalues-at-∞ as genuine eigenvalues in this section. Recall that are the number of positive (+) and negative (−) eigenvalues of . Similarly, let denote the number of eigenvalues-at-∞ of the limiting problem , so that . Let denote the eigenvalues of the limiting problem . The next proposition will be proved at the end of Section 8.
(Matrix Pencil Convergence).
If the matrices A, B, and C are as above andis trivial then:
for;
for;
for;
for each.
In the proposition we require that the is trivial only to simplify the statement. The proposition can be modified to account for being nontrivial by observing that the problem has the same spectrum as after adding an eigenvalue-at-∞ of multiplicity for each .
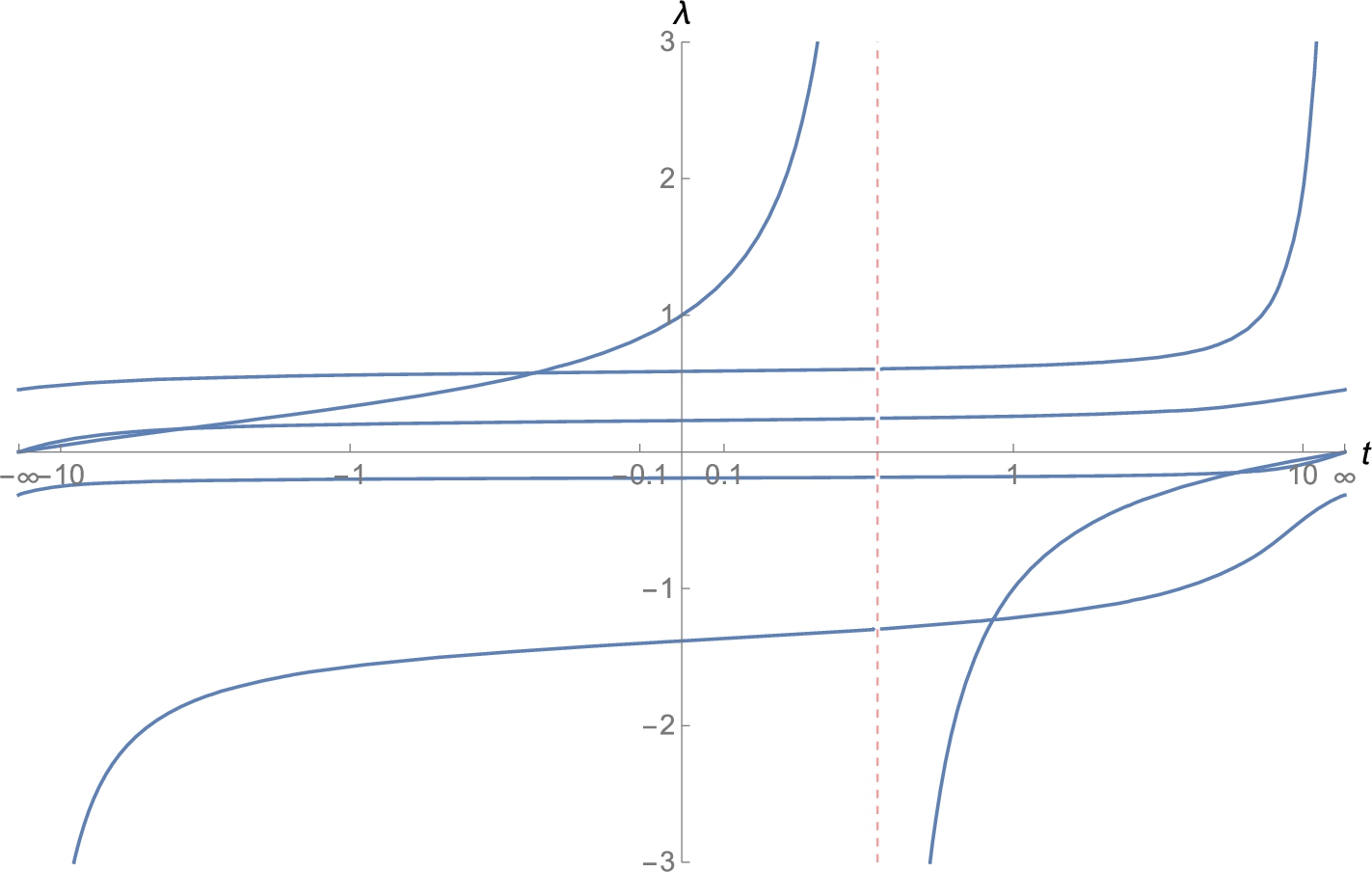
Eigenvalues of a matrix pencil problem are plotted using a nonlinear scale such that the right and left endpoints of the horizontal axis represent . is the identity matrix and B and C are as in (5). Apart from two negative eigenvalues that increase to zero, the eigenvalues of converge to those of as , including a positive eigenvalue that blows-up to the eigenvalue-at-infinity of the limiting problem. Notice the positive eigenvalue that blows-up in finite-time “reappears” as a negative eigenvalue, near the dashed vertical asymptote.
Positive eigenvalues that tend to in finite time “reappear” from as negative eigenvalues. This and other phenomena can be seen in Fig. 3, where the eigenvalues of are plotted with and
Note that since A is the identity, the eigenvalues plotted in the figure are just the reciprocals of the eigenvalues of the matrix .
Preliminary lemmas
Recall that and , where .
(Subspace Lemma).
If (C3) holds, then,, andare closed subspaces of. Consequently,andare Hilbert spaces. Whether or not (C3) holds we have
In either the fixed or moving Hilbert space setting, the map defined by is a norm continuous linear functional on for each by condition (C3). Observe that by the definition of . Thus, is a closed subspace since it is the intersection of closed subspaces. In the moving Hilbert space setting, the same argument holds for , and once we prove (6) it will hold for as well.
By definition of , the right side of (6) is contained in for all t. Thus, it is contained in . Let so that for all and for all t sufficiently large. Since the right side depends on t but the left side does not, we must have for all . Consequently, for all as well. Thus, u is an element of the right side of (6) and the equality holds. □
Moving Hilbert space preliminary lemmas
To prove our convergence theorems in the moving Hilbert space case we show that is uniformly coercive on (Lemma 5.5) and establish that is increasing for large t and bounded from above (Lemma 6.1). To show that the eigenvalues are increasing in t, it is not enough that the function is decreasing for each since the subspace depends on t.
The proof of the following lemma generalizes a calculation by Bandle and Wagner [6, Section 2] for the first eigenvalue of the dynamical boundary conditions problem to the Hilbert space setting. To do this define
where and are, respectively, the maximum and minimum of and over the unit sphere of . In the proof of the lemma we show that is an inner-product on for . In this case let be a -orthonormal basis for and be the linear operator defined by . Also define the linear operator by , where I is the identity operator. In what follows ⊕ denotes the algebraic direct sum of two vector subspaces.
(Projection Lemma).
Assumeandis trivial.
Ifis nonzero, thenwheneverandwhenever. Consequently,is a projection operator withand induces the decompositionwhen.
Ifthen
(i) Since and are weakly (and therefore norm) continuous and is finite dimensional, attains its maximum and attains its minimum on the unit sphere of . Moreover, since is trivial by (C1′) we have that by using Cauchy–Schwarz and the definition of . This shows that is well-defined and has a definite sign on for all t with .
It follows that is positive definite on when . Thus, is an inner-product on . Choose a -orthonormal basis of and note that by a direct calculation. Thus, is a projection operator with . It follows from the definition of that . Since is the complementary projection to we have .
(ii) Using the decomposition each vector in can be written as for some and . Expanding we have
since and on . In particular, if is any vector then
where the last inequality is just due to nonnegativity of . □
It follows from Lemma 5.2 that the condition “t is sufficiently large” from Theorem 2.3 and Proposition 2.4 can be replaced by the quantitative condition . In fact, the proof of Lemma 5.2 shows that it suffices to require that t is large enough that is negative on so that intersects trivially. Analogous statements hold as , that is, for Corollary 2.5.
Now we state a result that will establish coercivity of on and . Let and be closed subspaces of a Hilbert space with inner product and norm . Define the quantities
which should be interpreted as the cosine and sine of the angle between and , respectively. In the below theorem ⊥ denotes the orthogonal complement with respect to the inner product on .
Letbe a Hilbert space anda continuous symmetric bilinear form with. Ifis coercive onwith constantthenis coercive with constanton each closed subspaceofwith.
(Moving Hilbert Space Coercivity).
If conditions (C1′) and (C3) hold thenis coercive onand coercive onwith a constant that is uniform in t for.
Suppose that . By (C1′), is trivial and by part (i) of Projection Lemma 5.2 is trivial. Since and is coercive on by (C1′), Proposition 5.4 implies that is coercive on and on for each t. We will show that has a uniform coercivity constant on . It is sufficient to show that is lower semicontinuous and .
First we will show that the supremum defining is attained for each t. Let be an extremizing sequence (with ) and extract a weakly convergent subsequence and a strongly convergent subsequence with limit w (using that is finite dimensional). If then and so that is an extremizer for any unit norm . Otherwise, converges weakly to a nonzero u and is an extremizer. Thus, the supremum defining is attained.
For each t let be an extremizer so that . To see that is upper semicontinuous let be an arbitrary sequence such that as . Since and have unit norm we can assume (by extracting a subsequence) that and for some because by weak continuity. Thus,
Hence is lower semicontinuous.
To show , let be a sequence with as and extract a subsequence so that and . Thus, we have
Now we show that . Note that and . If we are done so assume that . By definition of we know that
By weak continuity, is uniformly bounded in n and so that for each . Thus, since . Since is nonnegative, Cauchy–Schwarz holds so that for each . This shows , and since is trivial we have . □
Although in what follows we work with the eigenvalues of , the following lemma shows there is no loss of generality since these eigenvalues coincide with the nonzero eigenvalues of .
(Moving eigenequation).
Assume that. If the moving Hilbert space conditions hold andsatisfiesthen the equation holds for all. Consequently,andhave the same nonzero eigenvalues, counting multiplicities.
As soon as , for each we have the decomposition by the Projection Lemma 5.2. Thus,
so that (7) holds for all .
Consequently, each eigenpair of is also an eigenpair of . Conversely, for each eigenpair of with we have by choosing , so that is an eigenpair of . □
Variational characterizations
We first state an inductive characterization of the eigenvalues due to Auchmuty [1]. Suppose and are symmetric bilinear forms on an arbitrary Hilbert space and that the problem has -orthonormal eigenvectors whose span is denoted by . Let
where denotes the -orthogonal complement. For we let .
Assume (C1)–(C3) hold. Iffor somethen,exists and equals, and there is an eigenvector ofat which the supremum definingis attained. Ifandare as above, then either:
andhas exactlypositive eigenvalues andon, or
andexists, equals, and has an eigenvector at which the supremum definingis attained.
Thus, the positive eigenvalues ofhave the formwhere the number of positive eigenvalues may be zero, finite, or infinite.
The following two theorems due to Auchmuty are crucial tools for proving monotonicity of eigenvalues and our stability result Proposition B.1. The theorem below is a slight strengthening of [1, Theorem 5.1].
Assume that (C1)–(C3) hold forand let. Ifis a positive eigenvalue ofthenwhereranges over all i-dimensional subspaces of. Conversely, if the above supremum is positive thenexists and is positive.
The variational characterization itself is precisely [1, Theorem 5.1]. To see the converse statement we proceed by induction. Suppose that . Observe that if the supremum is positive then is positive somewhere on the -unit sphere of , and so exists by Theorem 5.7.
Suppose that the result holds for . Observe that if the supremum is positive then is positive on the -unit sphere of some i-dimensional subspace . Let denote the -dimensional subspace spanned by the first eigenvectors of the problem , which exists by the inductive hypothesis and Theorem 5.7. By dimension counting, is nontrivial. Thus, is positive somewhere on so that exists by Theorem 5.7. □
Since is coercive on by Lemma 5.5, Theorem 5.8 may be applied to the problem for each t with . To prove bounds on and monotonicity of eigenvalues of it will be useful to expand the supremum in the variational characterization to a collection of subspaces that is independent of t.
(Moving Hilbert Space Variational Characterization).
Assume that the moving Hilbert space conditions hold,, and. Ifexists thenwhereranges over i-dimensional subspaces of. Conversely, if the supremum above is positive for some i thenexists and is positive.
By the original variational characterization in Theorem 5.8, it is enough to show that
The left side is at most the right since if then because for by Lemma 5.2.
To see the opposite inequality let be an i-dimensional subspace with the property that is trivial. Recall that is a projection onto with . Thus, the subspace is also i-dimensional since is trivial. Therefore, is a valid trial subspace for the left side of (9) so that the left side is larger than
In the second to last step we used that by writing v into the decomposition and using that is a projection on . In the final step we used that from the Projection Lemma 5.2. Taking a supremum over all such in (10) shows that the two suprema are equal.
If (10) is positive then the left side of (9) is also positive by the above calculation and so the converse statement in the theorem holds. □
The decomposition in Theorem 2.2 was originally stated in [1], with an erroneous definition of that Auchmuty later corrected in [2]. We reprove the corrected result below.
The existence of the positive eigenvalues of follows from the Existence Theorem 5.7. The existence of the negative spectrum follows from applying Theorem 5.7 to the problem and observing that .
To see the decomposition result let denote the -orthogonal complement and recall that and are the closed spans of the eigenvectors with positive (+) and negative (−) eigenvalues, respectively. Observe that by the eigenequation eigenvectors with distinct eigenvalues are -orthogonal so that and are -orthogonal and intersect trivially. We proceed by showing . For the forward inclusion let and take in the eigenequation so that
where are eigenvectors. Since we have for each so that .
To see the “⊃” inclusion, let and . When is an eigenvector, by the eigenequation since . By linearity and weak continuity of we have for each . Observe that on and on due to the Existence Theorem 5.7 so that on . If then so that
Thus, for each so that . □
Monotonicity and convergence lemmas
Recall that is the number of positive eigenvalues of and let . To prove our convergence results, first we show that when each has a limit as . By using the eigenequation this convergence will help us show that the limit of each eigenvector is in .
(Eigenvalue Monotonicity and Limit).
If the fixed or moving Hilbert space conditions hold (andin the moving case) andthenis increasing in t whenever it exists. If, in addition,then:
,
andexist and are at mostfor each(in the moving Hilbert space case).
Observe that by Proposition B.1, if exists for some t then it exists an open interval around t so it makes sense to say that is increasing on this set. Since is decreasing on , the variational characterizations in Theorems 5.8 and 5.9 show that is increasing in t (for in the moving Hilbert space case). In the fixed Hilbert space case, using the variational characterization and that on shows
The same holds in the moving Hilbert space case by imposing that is trivial in the first supremum and noting that is also trivial.
Taking reciprocals we see that is bounded from above by and is non-decreasing so the limit exists and is at most . □
Note that when the fixed Hilbert space conditions hold, is an inner product on that induces a norm equivalent to . When the moving Hilbert space conditions hold it only induces a seminorm on . The following lemma summarizes some facts that hold for in either the fixed or moving Hilbert space case. In what follows “weakly convergent” and “⇀” will mean weakly convergent with respect to the inner product on . Recall the lower triangle inequality for : for each .
(-Lemma).
Assume thatis a symmetric bilinear form. Ifsatisfies either (C1) or (C1′), and (C2), then:
Cauchy–Schwarz and the lower triangle inequality hold for;
Ifthenfor each;
Ifandthen;
Iffor each n andandconverge in the(semi)norm toandrespectively, then;
is weakly sequentially lower semi-continuous on.
To see (ii) simply note that is a continuous linear functional on for each , by assumption (C2).
Statement (i) can be proved by appealing to the fact that is a norm on . Statements (iii) and (iv) can be proved as if were an inner-product on .
To see (v) note that is a norm on (where ⊥ is with respect to the -inner product) so that it is weakly sequentially lower semi-continuous (w.s.l.s.c.) on . Since and are equivalent norms they have the same set of continuous linear functionals, and therefore, the same set of weakly convergent sequences. Hence is w.s.l.s.c. on , and thus on all of , as follows from using and the definition of w.s.l.s.c. □
In what follows let denote for , where is a sequence such that as . In the moving Hilbert space case we impose that .
(Strong Convergence).
Assume the fixed or moving Hilbert space conditions hold,, andis a sequence of-normalized eigenvectors ofwith weak limitand positive eigenvalues. Ifthen:
,, and.
Ifthenand ifthenand
On the other hand, ifandthen:
.
Note that part (iii) of the above lemma does not claim that converges strongly, so may be zero.
Since the index j on the eigenvalue and eigenvector is fixed we will drop it for notational ease. When we will write and .
(i)/(ii) Case 1: : To prove (i) and (ii), assume . By rearranging the eigenequation, in either the fixed or moving Hilbert space case (Lemma 5.6) for every we have
The right side is bounded since , , and are each bounded by weak convergence of , part (ii) of the -Lemma 6.2, and Monotonicity Lemma 6.1. This proves the “draining estimate”
Taking the limit as and using weak continuity of , we have that for each . This shows that .
Examining the eigenequation again we have
by the moving eigenequation Lemma 5.6. Choosing , the eigenequation reduces to
Recall that by assumption. By weak convergence, taking we obtain
To see strong convergence holds in the (semi)norm , recall that the -Lemma 6.2 says:
We proceed by checking . Since is weakly sequentially lower semi-continuous by the -Lemma 6.2, we know
On the other hand, using the eigenequation and nonnegativity of we have that
Taking the limsup of both sides, then using weak continuity of and (14) with we have that
Putting (16) and (17) together implies , and now (15) gives that . The remaining statements of part (i) will be proven at the end of Case 2 below.
Case 2: : Taking in (12) shows that and satisfy the first equation in (ii) by weak continuity. To see that strong convergence holds in the (semi)norm when , we again use (15) and proceed by checking . Since (16) stil holds, we only have to check . Let in (12) and take the limsup of both sides so that
by weak continuity of . After taking in (12), sending , and using weak convergence we have
so that and hence . The remainder of the proof is identical to the case when .
It remains to show that as and . Uniform coercivity implies that as . Since is -normalized this shows that so that .
(iii) Now assume that and . By using (13) and that is bounded in n for each we have
so that by weak continuity and hence . □
The draining estimate (11) is what establishes as a candidate for the limiting problem since it shows that limits of eigenvectors are in . Moreover, when the fixed Hilbert space condition holds and is positive somewhere on , a similar argument refines the -draining bound (11) to the more explicit bound: , where .
In the following lemma let as and .
(Convergence of eigenvectors with negative eigenvalue).
Assume the fixed or moving Hilbert space conditions hold,, andis a sequence of weakly convergent eigenvectors ofwith weak limitand negative eigenvalues.
Ifthenand
Ifthen.
(i) Since we know that is bounded so the same argument that proves the draining estimate (11) shows that . That and satisfy (18) follows from the argument that proves the case of (ii) in the proof of Lemma 6.3.
(ii) By choosing in the eigenequation for we find that
Since the is bounded in n and as we have for each by weak convergence. This shows that is in the -orthogonal complement of . □
Proofs of main results
We will prove our convergence and continuity results. The following Lemma will show that the limit of as is an eigenvalue of .
(Containment of the Spectrum).
Assume the fixed or moving Hilbert space conditions hold and. Ifis a collection of-normalized eigenvectors with eigenvaluessuch thatthen:
a subsequenceexists that converges in norm to some, and
is an eigenpair of, where.
Since is bounded we can extract a weakly convergent subsequence . By the Strong Convergence Lemma 6.3 this subsequence converges strongly with a nonzero limit and satisfies
Since is nonzero, it is a genuine eigenvector of equation (19) and is an eigenpair of . □
Part (i). (). Let for each . Recall that the limit exists by the Monotonicity Lemma 6.1.
Base Case: : By Lemma 6.1 we have so that . By Lemma 7.1 we know is an eigenvalue of so we must have that .
In preparation for the inductive step, we generalize the Strong Convergence Lemma to give strong convergence of a collection of eigenvectors. In what follows, u and v are said to be -orthonormal if and . Suppose is a set of -orthonormal eigenvectors of generated by the inductive procedure defining in (8) with eigenvalues such that for .
By Lemma 6.3 part (i), we can iteratively extract subsequences from for , to produce a common subsequence such that each eigenvector converges strongly to an eigenvector along this common subsequence. Call the common subsequence , let
and denote the set of limits by . Since is an -orthonormal set for each n, by the -Lemma 6.2 part (iv) we know is still an -orthonormal set. When we will write for and for .
Inductive Step: : Assume , , and that for each as . We will show that . By Lemma 6.1,
Taking limits and using the inductive assumption we obtain
If then we are done, so assume they are different. Lemma 7.1 implies equals either or . Now we show that .
Let and be constructed as in (20) and denote the eigenspace associated to . By the inductive assumption and that , we know . Since is -orthogonal to , it is also -orthogonal to . Thus, and so that .
Part (ii). : Now suppose , , and that exists with an -normalized eigenvector . Let
Note that by Proposition B.1. Our goal is to show that as . Let be as in (20) for an aribitrary sequence .
Case 1: Suppose that so that exists for all large t. Since is an -orthonormal set, by the inductive step is a maximal linearly independent set of eigenvectors of with positive eigenvalues. Now suppose, towards a contradiction, that . Then is -orthogonal to so that is not an eigenvector of with positive eigenvalue. On the other hand, Lemma 6.3 implies is a nonzero element of and satisfies
This is a contradiction because we have shown that is a linear independent set of eigenvectors with positive eigenvalues, but only has positive eigenvalues. Conclude that .
Case 2: Suppose that so that exists for each . Suppose, towards a contradiction, that and let . By Lemma 6.3 part (ii), we know that satisfies
Thus, is an eigenpair of so that has j positive eigenvalues for all , but at most for all . This is a contradiction since the set is open by the Stability Proposition B.1. Conclude that , that is, as . □
Proof of Proposition 2.4: Convergence of negative spectrum as
In the fixed Hilbert space case let be a finite dimensional subspace that intersects trivially. In the moving Hilbert space case, assume in addition that . Set and note that can take on any natural number up to and in the fixed and moving Hilbert space cases, respectively.
The form is positive on the unit ball of by using the definition of and Cauchy–Schwarz. Since and are both norm continuous and the -unit sphere of is compact, is bounded by some number and attains its minimum, say . Thus, with and so on all of .
Let and and suppose we are in the fixed Hilbert space case. By the variational characterization in Theorem 5.8 we have
Since is positive on the unit sphere of the problem has positive eigenvalues. This shows that the supremum in (21) is positive, and therefore, exists and equals the reciprocal of it by the variational characterization in Theorem 5.8. Taking reciprocals we have
and sending proves convergence to zero. Since , the eigenvalue monotonicity Lemma 6.1 implies is increasing, which completes the proof in the fixed Hilbert space case.
In the moving Hilbert space case, we can replace by in (21) and proceed as above (up to but not including the monotonicity statement) when , since . To see this recall that and apply Lemma 5.1 to conclude that each satisfies for all , so that . □
Proof of Corollary 2.5: Convergence of spectrum as
If j is a positive integer and exists, observe that
since . Parts (i) and (ii) of Corollary 2.5 follow by using parts (i) and (ii) of Theorem 2.3 to compute the right side of (22) as . Using that
completes the proof when . Similarly, part (iii) follows from using Proposition 2.4 and observing that the pair generates the same space as the pair , by Lemma 5.1. □
In order to apply our convergence theorems, we verify the fixed or moving Hilbert space conditions hold for the problems in Table 1. The right sides of the first five partial differential equations in Table 1 are all generated by , which allows us to verify many of the necessary conditions in the following lemma. The full proof of the sixth application, the Laplacian with Dynamical Boundary Conditions, will be given separately in Lemma 8.9. Recall that is the space of functions in restricted to Ω.
If the assumptions on b and c from Section
3.1
hold andorfor somethen:
andare well-defined and satisfy (C3);
;
ifthen; ifthen;
assume that the fixed or moving Hilbert space conditions hold. If(or) thenandhave infinitely many positive (or negative) eigenvalues. Similarly, if(or) thenhas infinitely many positive (or negative) eigenvalues;
andare infinite.
Our PDE convergence results in Proposition 3.1 likely hold under weaker assumptions on O, Ω, and than those stated in Section 3.1. For example, the bilinear forms and are weakly continuous even when O is unbounded (see [24, Lemma 2.13] for and ). This suggests our results could handle problems such as the Schrödinger eigenvalue problem on for V such that generates a coercive and continuous bilinear form on an appropriate Sobolev space. Additionally, the condition “ is open” could be eliminated by defining . To see this it would suffice to check parts (ii) and (iii) of the above lemma continue to hold.
Recall that and are the bilinear forms and with the integration restricted to Ω. We wish to show convergence of the spectrum of to that of , but our convergence theorems give convergence to the spectrum of . This is easily overcome because the spectra of these two problems coincide. Indeed, observe that and for each , where and are restrictions of u and v to Ω since Γ has measure zero. Using this and the eigenequation implies that and have the same spectrum. This shows that has a discrete spectrum of eigenvalues of finite multiplicities. The convergence theorem (Theorem 2.3) will imply that the eigenvalues of converge to those of the problem , which proves Proposition 3.1.
(i) Observe that and are well-defined by the Hölder and Sobolev inequalities (see [17, Theorem 8.8] and note that Lipschitz domains satisfy the interior cone condition).
(C3): Suppose and in . For weak continuity of we will show that . The argument is the same for . By a straightforward polarization argument it is enough to show . Thus, to show convergence it suffices to prove that weakly in when and weak* in when , where q is the Hölder conjugate exponent of (defined in (4)).
First consider an arbitrary subsequence and note that in . It follows from the compact embedding that in after extracting a subsequence. Convergence in guarantees the existence of a further subsequence such that pointwise a.e. Since is bounded in , it is also bounded in by the Sobolev inequalities. It follows from the Banach–Alaoglu theorem that -boundedness plus pointwise a.e. convergence implies weakly in when and weak* in when [12, Ch. 6 Exercise 20].
(ii): The functions are the functions such that for every . Let so that . Since on we have a.e. in . Conversely, if a.e. on then .
(iv): First suppose that has positive measure. To show that there are infinitely many positive eigenvalues we will construct subspaces of arbitrarily large dimension on which .
First let be the square root of an approximate identity and extend by zero so that a.e. on E as . In particular, for each there are points such that for . Thus, by taking ϵ small enough we have that for each i and that have pairwise disjoint support. Let for each so that are linearly independent and .
Let be arbitrary and let for be constructed as above. Then
for every nonzero since the functions have disjoint support.
In the fixed Hilbert space case, the variational characterization in Theorem 5.8 shows that there are at least N positive eigenvalues since is N-dimensional and is uniformly positive on the -unit ball of the span. Since N is arbitrary must have infinitely many positive eigenvalues. The claim for can be proved the same way that it was proved for by working with and Ω instead of and O.
For the moving Hilbert space case, suppose that has dimension m, that is a basis, and let be arbitrary. Then let be functions constructed as above. Consider the matrix with th-entry . The kernel of the transpose of this matrix has dimension at least N by the rank-nullity theorem. Thus, there are linearly independent vectors for such that
Let so that by (24). The set is linearly independent so that is an N-dimensional subspace of . Since consists of linear combinations of we know that is uniformly positive on the -unit sphere of by the same calculation in (23). Thus, has at least N positive eigenvalues by the variational characterization in Theorem 5.8. Since N is arbitrary, and therefore must have infinitely many positive eigenvalues.
When and have positive measure an analogous construction can be performed to show that and have infinitely many negative eigenvalues.
(v): In the fixed Hilbert space case is infinite because the smooth functions with support in are an infinite dimensional subspace of .
For the moving Hilbert space case, recall that
To show that is infinite, it suffices to construct arbitrarily many functions with disjoint support contained in that are both and -orthogonal to .
To see that , we can construct matrices whose transposes have th-entries and , where and , similarly to before. One can show that the intersection of the kernels of these matrices has dimension of order N as . Forming linear combinations of with coefficients given by vectors in the intersection produces subspaces of of arbitrarily large dimension. This shows that is infinite. □
Once we verify that the remaining fixed or moving Hilbert space conditions, either (C1) or (C1′), and (C2), are satisfied for each problem we will have proved Propositions 3.1 with the exception of the Dynamical Boundary Conditions problem, because Lemma 8.1 has already verified (C3) and identified the space associated to the limiting problem. Additionally, given the weights b and c the lemma determined , , , the number of positive and negative eigenvalues of , and in the moving Hilbert space case, for each problem in Table 1.
(Schrödinger Operator and Dirichlet Laplacian).
Let b and c be as in Section
3.1
andbe nonnegative. Ifand, then the fixed Hilbert space conditions are satisfied.
Continuity of follows from using boundedness of V. Coercivity follows using and the Poincaré inequality. This shows (C1) and (C2), and (C3) was proved in Lemma 8.1. □
(Robin Laplacian).
Let b and c be as in Section
3.1
. Ifandwith, then the fixed Hilbert space conditions are satisfied.
The coercivity condition (C1) can be verified using a proof by contradiction similar to the proof of the usual Poincaré inequality, which can be found in [10, Section 5.8.1]. Alternatively, coercivity follows from a general Hilbert space coercivity theorem (see [13, example 5]).
Using that the trace operator is bounded from into shows that is continuous and verifies (C2). Recall (C3) was proved in Lemma 8.1. □
(Clamped Bi-Laplacian).
Let the weights b and c be as in Section
3.1
. Ifandwith, then the fixed Hilbert space conditions are satisfied.
Continuity of on is immediate. For coercivity, note
for , by integration-by-parts. The coercivity condition (C1) then follows from repeated applications of the Poincaré inequality to the right side of (25) and to the gradient term in . Again, (C3) was proved in Lemma 8.1. □
Let denote the space of polynomials of degree at most m on O. Since O is a bounded Lipschitz domain the following theorem will establish that the forms are coercive on in the moving Hilbert space applications. In this section ⊥ denotes the -orthogonal complement, where or . When the result is essentially the Poincaré inequality on , for functions with mean value zero. Recall that O is a domain and therefore is connected.
([13, Corollary 1]).
Let. Ifthenis coercive on.
(Neumann Laplacian).
Let the weights b and c be as in Section
3.1
. Ifandthen the moving Hilbert space conditions are satisfied.
The continuity condition (C2) is obvious and (C3) was proved in Lemma 8.1. The coercivity condition (C1′) is satisfied because is 1-dimensional, consisting just of the constant functions. Since on a set of positive measure, the only constant function in is the zero function so is trivial.
Coercivity on follows immediately from Theorem 8.6 with . Alternatively, it follows from the Poincaré inequality (see [10, Section 5.8.1]) and noting that the map is the orthogonal projection onto the constants. □
(Free Bi-Laplacian).
Let the weights b and c be as in Section
3.1
. Ifandwith, then the moving Hilbert space conditions are satisfied.
The continuity condition (C2) is obvious and (C3) was proved in Lemma 8.1. To see (C1′), first suppose that . It is easy to see that . Since on an open set any polynomial in must be identically zero on , and so is trivial. Coercivity on follows from noting that is equal to and applying Theorem 8.6.
When condition (C1′) follows from the case since consists of the constants (rather than all of the first degree polynomials) and the τ-term only makes larger than when . □
(Laplacian with dynamical boundary conditions).
Assumeis a bounded Lipschitz domain. If,, andand, then the moving Hilbert space conditions are satisfied and. Whenthe problemhas infinitely many positive and negative eigenvalues for eachandis infinite. Whenthe same holds except there is only a single negative eigenvalue for large t, and.
Continuity of is clear. Verifying (C1′) is identical to the Neumann case once we show since the constants intersect trivially. Indeed, the bilinear form
has kernel
Since Ω is Lipschitz, (see [22, Section 2.4.3]), and so
To see (C3) note that weak continuity of follows from Lemma 8.1. For weak continuity of , let be weakly convergent sequences with limits u and v. Since the trace map is a compact operator on Lipschitz domains [22, Section 2.6.2] it is also completely continuous [23]. Therefore, in and similarly for . This shows that and so is weakly continuous.
The numbers of positive and negative eigenvalues follow directly from [5, Theorem 2] (by setting for ).
To compute recall that , where
is the subspace of harmonic functions in . This also induces the decomposition . Together with (26) we have
By the Subspace Lemma 5.1, we know
When , the space is infinite dimensional as it contains the harmonic polynomials. Since has codimension at most two in we know . When , the only harmonic functions are the linear polynomials so a direct calculation shows .
Alternatively, one could compute more directly. If and one can show that an element of differs from an element of by a linear function, which shows that . If then one can construct infinitely many functions in that have disjoint supports and are nonzero on the boundary. These functions can not differ from each other by elements of . Therefore, their span is an infinite dimensional subspace of the quotient so that . □
Proof of Proposition 4.1: Matrix pencil convergence
Part (ii) of the proposition follows immediately from the Convergence Theorem 2.3. To show the remaining parts let denote the number of positive eigenvalues of and similarly for and .
First we will show that for all large enough t. By definition of
Hence, it suffices to show that the eigenvalue problem only has finitely many nonzero finite eigenvalues.
Let v be a (nonzero) eigenvector of with eigenvalue μ. If we must have since is trivial so that by Cauchy–Schwarz for . Note that eigenvectors of with distinct eigenvalues are -orthogonal. It follows that eigenvectors with distinct nonzero eigenvalues must be linearly independent. Thus, there can only be finitely many nonzero eigenvalues of since is finite dimensional.
Next we will show that there is a T such that
Recall that each with tends to as for some by Convergence Theorem 2.3. Since is a decreasing function of t by Proposition B.1 there can only be finitely many eigenvalues that tend to in finite time. Thus, there is a T such for all each positive eigenvalue of either: converges to a positive eigenvalue of or tends to as . By Lemma 6.3, the positive eigenvalues that tend to in infinite time have a subsequence of eigenvectors that converge strongly to an element of , since weak convergence is equivalent to strong convergence in finite dimensions. There can be at most such eigenvalues because the approximating eigenvectors can be chosen to be -orthonormal so that they converge to a linearly independent subset of . This shows and proves (27).
Since for large t we can increase T if necessary so that (28) becomes
By Proposition 2.4 we know at least negative eigenvalues increase to zero. On the other hand, at most negative eigenvalues increase to zero since the corresponding eigenvectors can be chosen to be -orthogonal, and therefore a subsequence converge strongly to a linearly independent subset of by Lemma 6.5. Thus, exactly negative eigenvalues increase to zero. This leaves at least eigenvalues that do not tend to zero. By Lemma 6.5 each of these eigenvalues tend to a negative eigenvalue of the limiting problem. By extracting strongly convergent subsequences of the eigenvectors, there can be at most by pairing each approximating eigenvalue with the negative eigenvalue it converges to.
This shows that the eigenvalues for each . This leaves exactly positive eigenvalues remaining that must increase to as . □
(Finite-time blow-up).
Suppose that for some . It follows from the Stability Proposition B.1 that exists on but not for . Since is nontrivial for only finitely many t by the proof of Proposition 4.1 above, there is a neighborhood of such that is nontrivial only at on that neighborhood. Thus, in order for to have d eigenvalues for there must be a negative eigenvalue that exists on but not for . By Corollary 2.5, this negative eigenvalue must tend to as . This explains the “reappearing” phenomenon mentioned in the caption of Fig. 3.
Footnotes
Acknowledgements
The author would like to thank Richard Laugesen for his guidance on the writing of this paper and Giles Auchmuty for helpful email correspondences. Support from the U.S. Department of Education through the Graduate Assistance in Areas of National Need (GAANN) program and the University of Illinois Campus Research Board award RB19045 (to Richard Laugesen) is gratefully acknowledged.
Identification of K ˜ : The restriction of K to Ω
The next lemma shows that the trace from one side of Γ equal the trace from the other side. Recall that O is a bounded Lipschitz domain, and are open sets with Lipschitz boundaries, and .
Recall that is the subspace of or consistsing of functions that vanish on , and is the space of functions in restricted to Ω.
Under the above conditions on O, Ω, andwe have thatwhenor, respectively.
First we show that . Let be the restriction of to Ω. Note on . By Lemma A.1, is zero a.e. on Γ for each multi-index β with . This shows that . In particular, this shows that if then since by Lemma A.1.
To show that , we will show that if then its extension by zero to all of O is an element of . Since already, it is enough to show that
has weak derivatives of order k. The remainder of the proof will proceed by induction on k.
Base Case: First assume that . Let denote the weak partial derivative of u in the variable . We will show that
is the weak derivative of .
Since Ω has Lipschitz boundary, the usual integration-by-parts formula holds for every (see [11, Section 4.3]) so that
where is the ith-component of the outward unit normal vector to .
Observe that , and since φ has compact support in O. Since by Lemma A.1 the integrand of the boundary term in (30) is zero. Thus,
which shows that the weak derivative of exists and equals , so that .
Inductive Step: Suppose that and let . In particular, , and so and has weak derivatives for each multi-index with by the inductive hypothesis. Since , the base case implies that so . Thus, . □
Stability of spectrum
The next proposition proves stability results for the spectrum in both the fixed and moving cases. (Stability of spectrum).
Assume the fixed Hilbert space conditions hold. Thenhas at leastpositive andnegative eigenvalues for all. Ifexists for somethenexists onfor some. Similarly, ifexists for somethenexists onfor some. Additionally, the number of positive and negative eigenvalues are decreasing and increasing functions of t, respectively.
Assume the moving Hilbert space conditions hold. Thenhas at leastpositive andnegative eigenvalues for all sufficiently large positive and negative t, respectively. Ifexists for some sufficiently largethenexists on some open interval around. Similarly, ifexists for some sufficiently negativethenexists on some open interval around. Additionally, the number of positive and negative eigenvalues are decreasing and increasing functions of t for all sufficiently large positive and negative t, respectively.
We first prove Proposition B.1 for the positive eigenvalues. Recall that is the number of positive eigenvalues of , and let until the end of the proof for notational ease. There is nothing to prove when so assume that .
Let t be fixed ( in the moving Hilbert space case). By applying the variational characterization in Theorem 5.8 to we know that is positive on the -unit sphere of some J-dimensional subspace .
The same variational characterization applied to shows that has at least J positive eigenvalues. The same holds in the Moving Hilbert space case by the variational characterization in Theorem 5.9 since being trivial implies that is trivial.
Suppose that exists. To see that exists in an open interval around , observe that by the variational characterizations in Theorems 5.8 and 5.9 there is a j-dimensional subspace so that , with in the moving Hilbert space case. Let so that on the -unit sphere of when . The variational characterizations show that has j eigenvalues for each in the fixed Hilbert space case and has j eigenvalues for each in the moving Hilbert space case.
Let denote the number of positive eigenvalues of . To see that is a decreasing function of t suppose, towards a contradiction, that (both larger than T in the moving Hilbert space case) are such that . Thus, there is an eigenvalue that exists at but not at , which contradicts the above stability result. Conclude that is decreasing in t.
To see the analogous statements for the negative eigenvalues note that
In the fixed Hilbert space case, applying the above result for the positive eigenvalues to we see that it exists for each . Since , using (31) we obtain the result for the negative eigenvalues. Existence of for for some follows from the result for positive eigenvalues and (31). Since the number of negative eigenvalues of is equal to the number of positive eigenvalues of by (31) we have the monotonicity result for the number of negative eigenvalues.
The same holds for in the moving Hilbert space case, but now we must take to apply the above result to .
Each eigenvalue has finite multiplicity due to [1, Theorem 4.3]. □
Lipschitz continuity of spectrum
In the moving Hilbert space case it is possible that the functions are only locally Lipschitz continuous when they exist since there can be curves of eigenvalues passing through zero. See point 1 in the discussion at the end of Section 2.
References
1.
G.Auchmuty, Bases and comparison results for linear elliptic eigenproblems, J. Math. Anal. Appl.390(1) (2012), 394–406. doi:10.1016/j.jmaa.2012.01.051.
2.
G.Auchmuty, Item C7 at https://www.math.uh.edu/~giles/MyWeb/Recent.html.
3.
G.Auchmuty and M.A.Rivas, Unconstrained variational principles for linear elliptic eigenproblems, ESAIM Control Optim. Calc. Var.21(1) (2015), 165–189. doi:10.1051/cocv/2014021.
4.
L.Bandara, M.Nursultanov and J.Rowlett, Eiegenvalue asymptotics for weighted Laplace equations on rough Riemannian manifolds with boundary, arXiv:1811.08217.
5.
C.Bandle, J.von Below and W.Reichel, Parabolic problems with dynamical boundary conditions: Eigenvalue expansions and blow up, Atti Accad. Naz. Lincei Rend. Lincei Mat. Appl.17(1) (2006), 35–67. doi:10.4171/RLM/453.
6.
C.Bandle and A.Wagner, Shape optimization for an elliptic operator with infinitely many positive and negative eigenvalues, Adv. Nonlinear Anal.7(1) (2018), 49–66. doi:10.1515/anona-2015-0171.
7.
F.Belgacem, Elliptic Boundary Value Problems with Indefinite Weights: Variational Formulations of the Principal Eigenvalue and Applications, Pitman Research Notes in Mathematics Series, Vol. 368, Longman, Harlow, 1997.
8.
S.Cox, The two phase drum with the deepest bass note, Japan J. Indust. Appl. Math.8 (1991), 345–355. doi:10.1007/BF03167141.
9.
A.Derlet, J.-P.Gossez and P.Takáč, Minimization of eigenvalues for a quasilinear elliptic Neumann problem with indefinite weight, J. Math. Anal. Appl.371(1) (2010), 69–79. doi:10.1016/j.jmaa.2010.03.068.
10.
L.C.Evans, Partial Differential Equations, 2nd edn, Graduate Studies in Mathematics, Vol. 19, American Mathematical Society, Providence, RI, 2010.
11.
L.C.Evans and R.F.Gariepy, Measure Theory and Fine Properties of Functions, revised edn, Textbooks in Mathematics, CRC Press, Boca Raton, FL, 2015.
12.
G.B.Folland, Real Analysis. Modern Techniques and Their Applications, 2nd edn, Pure and Applied Mathematics (New York). A Wiley-Interscience Publication, John Wiley & Sons, Inc., New York, 1999.
13.
C.Gräser, A note on Poincaré- and Friedrichs-type inequalities, arXiv:1512.02842.
14.
E.L.Ince, Ordinary Differential Equations, Dover Publications, New York, 1944.
15.
U.Kaufmann, J.Rossi and J.Terra, The ∞-eigenvalue problem with a sign-changing weight, Nonlinear Differential Equations Appl.26(2) (2019), Art. 14.
16.
J.Lamboley, A.Laurain, G.Nadin and Y.Privat, Properties of optimizers of the principal eigenvalue with indefinite weight and Robin conditions, Calc. Var. Partial Differential Equations55(6) (2016), Art. 144.
17.
E.H.Lieb and M.LossAnalysis, 2nd edn, Graduate Studies in Mathematics, Vol. 14, American Mathematical Society, Providence, RI, 2001.
18.
Y.Lou and E.Yanagida, Minimization of the principal eigenvalue for an elliptic boundary value problem with indefinite weight, and applications to population dynamics, Japan J. Indust. Appl. Math.23 (2006), 275–292. doi:10.1007/BF03167595.
19.
R.Ma, C.Gao and Y.Lu, Spectrum theory of second-order difference equations with indefinite weight, J. Spectr. Theory8(3) (2018), 971–985. doi:10.4171/JST/219.
20.
D.Mazzoleni, B.Pellacci and G.Verzini, Asymptotic spherical shapes in some spectral optimization problems, J. Math. Pures Appl. (9)135 (2020), 256–283. doi:10.1016/j.matpur.2019.10.002.
21.
D.Mazzoleni, B.Pellacci and G.Verzini, Quantitative analysis of a singularly perturbed shape optimization problem in a polygon, arXiv:1902.05844.
22.
J.Nec˘as, Direct Methods in the Theory of Elliptic Equations. Translated from the 1967 French original by Gerard Tronel and Alois Kufner. Editorial coordination and preface by S˘. Nec˘asová and a contribution by Christian G. Simader, Springer Monographs in Mathematics, Springer, Heidelberg, 2012.
23.
W.Rudin, Functional Analysis, 2nd edn, International Series in Pure and Applied Mathematics, McGraw-Hill, Inc., New York, 1991.
24.
M.Willem, Minimax Theorems, Progress in Nonlinear Differential Equations and Their Applications, Vol. 24, Birkhäuser Boston, Inc., Boston, MA, 1996.