A classical problem describing the collective motion of cells, is the movement driven by consumption/depletion of a nutrient. Here we analyze one of the simplest such model written as a coupled Partial Differential Equation/Ordinary Differential Equation system which we scale so as to get a limit describing the usually observed pattern. In this limit the cell density is concentrated as a moving Dirac mass and the nutrient undergoes a discontinuity.
We first carry out the analysis without diffusion, getting a complete description of the unique limit. When diffusion is included, we prove several specific a priori estimates and interpret the system as a heterogeneous monostable equation. This allow us to obtain a limiting problem which shows the concentration effect of the limiting dynamics.
A classical problem describing the collective motion of cells, is the movement driven by consumption/depletion of a nutrient [11,17,18]. The simplest description uses a number density of cells and a nutrient concentration . It is written
completed with initial data , , such that
We have introduced a parameter ε which measures the time scale of the cell random motion compared to nutrient consumption. Our interest here is when this parameter is small because it is a case when a pattern is produced under the form of a high concentration of cells despite the parabolic character of Equation (1). In fact this phenomena is closely related to concentration effects in non-local semi-linear parabolic equations as studied intensively recently, see [6,9,16,19] and the references therein. This analogy leads us to postulate that concentrate as Dirac masses at points where undergoes a discontinuity.
The scale proposed here, which is chosen to produce a distinguished limit, is usual for semi-linear diffusion equations and has been studied for local problems in classical works, [2,10]. The most efficient method is to use the Hopf–Cole transform and viscosity solutions of Hamilton–Jacobi equations [7,8]. We restrict our analysis to one dimension to explain the solution structure as depicted in Fig. 1 but significant parts of our analysis can be extended to several dimensions.
Several related studies can be mentioned. Coupling Ordinary and Partial Differential Equation is rather classical in different areas: for pattern formation, see [12] (study of existence and stability of stationary solutions), modeling of two species dynamics with an unmotile specie [5,20] for instance. Traveling waves with a non-motile phase have also been studied, see [21] and the references therein. However we are not aware of any analytical study related to the scaling proposed here.
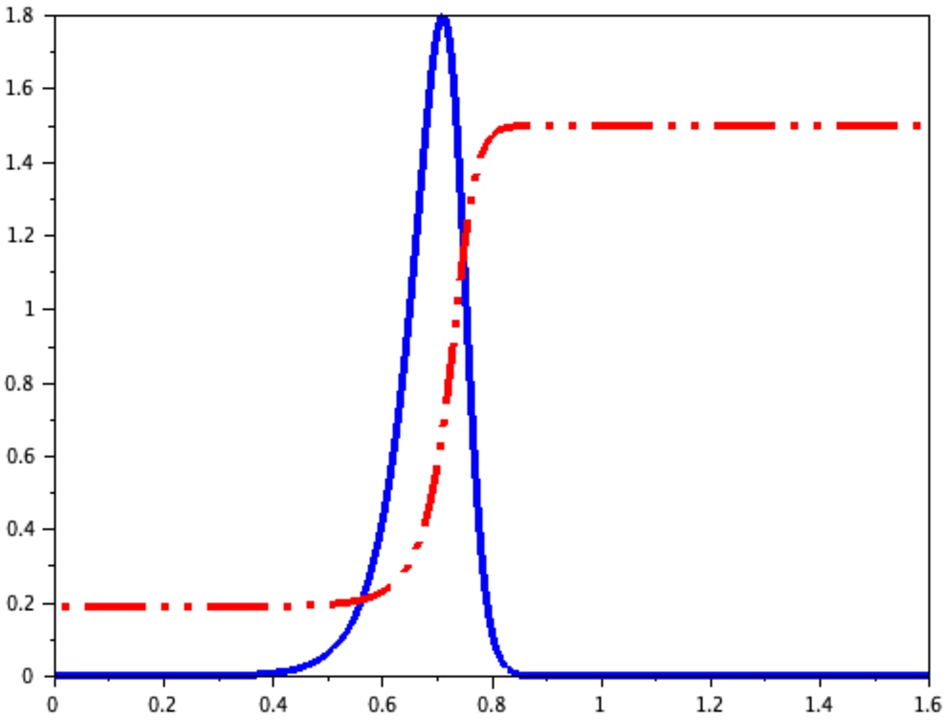
Traveling wave solution of Equation (1). In blue/solid line the component . In red/dashed line, the nutrient .
Our approach combines a reformulation of the problem which leads to a heterogeneous monostable equation for and the standard Hopf–Cole transform as mentioned above. This a convenient tool to represent the Dirac concentration of under the form where φ behaves like a quadratic function.
In Section 2, we begin with a simpler case where we omit the diffusion on , arriving to a system of ordinary differential equations which can be solved nearly explicitly. This allows us to introduce the tools which are used in Section 3 where we state and prove the concentration effect. Several related questions are detailed in appendices: the particular case of traveling waves, and some Sobolev regularity results.
The problem without diffusion
We begin with the simpler case where diffusion is ignored and where we can give a complete description while introducing the main tools for the general problem. We are reduced to a system of two differential equations with a parameter x, which solutions however behave as a front propagation in space, namely
We define
and observe that is a strictly convex function with a minimum at . Moreover converges to as or . Given an initial condition this allows us to define two branches and s.t. and provided .
We assume there are constants and such that
In other words has an initial increasing discontinuity at because of the assumption and stay away from μ even as x approaches 0. For the cell density, we assume that in the weak sense of measures, as , for some fixed constant ,
In this framework, we can describe the behavior of solutions as follows
Assume (
3
)–(
4
) and that. The solution of (
2
) has limits(weak measures) and(strongly inin time and space) and, forthere is a timeandsuch that
A remarkable property of the system (2) is the identity
which implies
Using this inequality and the fact that decreases in time, we first conclude for , and thus as , therefore . More precisely, there exists s.t. on for all t. Thus . Since , we also have that s.t. from (5)
implying the convergence of on for any .
For , we conclude from (5) and assumption (3), that there are constants such that
Also, integrating the second equation of (2), we have for all ,
and since we expect that is a concentrated measure, we define . It satisfies
We can argue x by x and define as (after extraction of subsequences, but the uniqueness of the limit shows that it is the full family) the strong limits in for any for and in for
By the dominated convergence theorem, since is uniformly bounded, we also obtain the strong convergence of in for any .
We can also define the weak limit
These limits satisfy the equations obtained passing to the limit in (2) and (7)
We observe in particular that for any fixed x, if , then from the bound on , we get that
The strong convergence of proves that, at the limit, . With a similar argument, one can show that is exponentially small on . Since is uniformly Lipschitz in t, we have convergence of the corresponding level sets and this implies that .
Because of this last equality, belongs to one of the two branches of roots of . Therefore is away from 0 and there is a first time such that and for . This time is also the jump time from one branch to the other for v as stated in (i).
We can also compute, from the above equation on , and this gives (ii), namely
The time is fully identified from the limiting system: By integrating the equation on , we find that
For , as , is strictly increasing in time for , and strictly decreasing for .
Furthermore by the second equation, we have that . Hence this characterizes as
This gives (iii) and identifies completely the limiting solution x by x.
Observe that we only define for . It would possible to extend (iii) to since for those x, since is well defined for every x. This yields for , which is consistent with (i) and (ii), though not very useful. □
The full problem
When diffusion is included, the previous analysis, which uses fundamentally x by x convergence, does not apply and the assumptions have to take into account the diffusion term. We also make more general assumptions. For the initial data, we assume that
and, satisfies
Then, recalling the definition , we also use
and we can define uniquely two smooth branches of initial data by
Note that assumption (11) provides corresponding bounds on and , which are
And we also use, for an unessential result, the stronger condition
Finally, we use the notation .
Our main theorem now reads
Assume thatand that assumptions (
9
)–(
11
) hold. The solution of (
1
) has limits(weak measures) and(strongly in) and, there is a timeandsuch that
forand,forand,
.
Compared to the case without diffusion in Theorem 1, there is no simple explicit formula for the jump time . However, here it is also characterized by for the solution of an Eikonal equation.
The end of this section is devoted to the proof of Theorem 2.
Our analysis is based on the observation that , thus, from (1), we get the identity
and consequently
which we can write in terms of as
Notice that this is a monostable equation of Fisher/KPP type, where the steady states depend on x.
A priori estimates on.
The inequalities holdand for any R, there is a constantsuch that,Finally, with the additional assumption (
15
), we have.
For the first statement, on the one hand, we note that we necessarily have that for any x, or . In both cases, that implies that . Since is non-increasing in time, so is and
On the other hand, as , we can deduce from (16), that
Using assumptions (9) and (11) (or more precisely (14)), one may bound the right-hand side by some constant C so that
We conclude from the maximum principle that at a minimum value of , the quantity is controlled from below by . From the definition of , the lower bound on follows. Note that assumption (15) is not required here as we do not need to show that the right-hand side of (19) is of order ε but simply that it is bounded.
Define the negative part of f as and observe that the usual convex inequalities yield that . It follows from (19) that
Because the set lies in the decreasing branch of , the quantity is positive. We integrate against some smooth non-negative ψ with on and ψ compactly supported in . Since we have already proved that is bounded, we obtain the estimate
Using assumption (9) and assumption (11) concludes the second point of the lemma.
We may also use the specific assumption (15) in (20), we obtain that
Recalling that is positive, we conclude that
and thus the third statement of Lemma 3 holds, namely . □
Concentration dynamics of. We turn to the study of and begin with some simple estimates.
∙ Since , and using the bound (17), we find
and thus, integrating in space and time the equation on , we also get
∙ Next, we use the Hopf–Cole transform
As usual, we compute that satisfies the Eikonal equation
We are going to show some uniform bounds on .
We have
Before proving the estimates, we observe that for a fixed , the system (1) is well-posed on any time interval. Moreover by differentiating in x or t, it also follows that and or are . Of course those bounds are not uniform in ε and, in fact, may behave very poorly with factors.
Still for fixed , we may now solve the viscous Eikonal (23) on since is now given and smooth, having been obtained from (1). Since the viscosity is strictly positive, we obtain a classical solution , from [1] for example; but again with a priori very poor dependence on ε on any bound. This however allows to easily justify the following calculations.
For the time derivative, differentiating (23) and using the equation on , we find
so that the maximum principle gives which gives (24) thanks to the assumption (10).
Next, we prove the Lipschitz bound. Consider any point that is a maximum in x of at any time t (standard arguments apply if the maximum is not achieved, see [1,7]). Then and we conclude, still using (24), that
Once uniformly, standard parabolic estimates (see for example [13,15]) provide a uniform bound on in for any .
Finally, since is uniformly Lipschitz in x, let be a maximum of , then
so that, using (22),
which proves the upper bound in (26). The lower bound relies, as it is standard [1,3,7], on the construction of a sub-solution. Here one can immediately check that will work. □
Compactness of. We introduce the quantity , defined up to a constant, by
With assumptions (
11
)–(
9
), we haveConsequently, by monotonicity of Φ in w,is locally compact infor any.
It is also possible to conclude from this lemma that is uniformly bounded in for some ; see Appendix B.
First of all, calculate
which yields, from the Lipschitz bound on in (27) and the estimate (21),
Next, we write . Since is bounded in , and thanks to the second bound in Lemma 3, we conclude that
Since and bounded provide us with compactness in time, we conclude that is compact and thus converges a.e. By monotonicity of Φ in , we also conclude that converges a.e. □
Convergence as. We are now ready to study the limit as ε vanishes.
∙ The bounds in Lemma 4 show that is locally compact in and hence, after extraction of a subsequence that we still denote by ε, there exists φ which is Lipschitz in space and with time derivatives in such that
We note that
∙ From Lemma 5, we also conclude that converges locally; for any ,
∙ From the bound (21), we can also extract a subsequence such that, in the weak sense of measures,
We may pass to the limit, in distributional sense, in Equations (1) and get, as ,
which expresses that the concentration of the measure is exactly at the point where . And from Lemma 3, we know that
Since w is non-decreasing in time, we conclude that, for all , a subset of where , there is a unique time such that w jumps from to (with for ), and
Open questions. Uniqueness for the limit problem, which we proved when diffusion is ignored (Section 2, is an open question in full generality. In particular it seems hard to determine more properties about the set , which depends on the initial data. In the monotone case when for and for with , one can expect be invertible and to obtain a front located at some value .
Footnotes
Traveling wave
Traveling waves are an intuitive way to understand, in a very particular case, the general behavior of system (1). considering solutions of the form , , . Recalling the notation , we arrive at an equation on the single quantity ,
with the conditions at infinity
This is just a Fisher/KPP monostable equation with the unstable state and we know from the general theory [14] that there is a traveling wave with minimal speed which is characterized by the property of a double root for the polynomial
that is . In our analysis, this value also appears in the limit of Equation (23), that is the Eikonal equation
which for the traveling wave problem generates a solution with
where for and for . The limiting minimal speed traveling wave solution is
and is the double root of the polynomial . This approach based on the concentration as a Dirac measure of differs (but is restricted to one dimension) from the general front propagation theory in [2,4] based on the quantity .
A Sobolev estimate
We may use the bound (28) to obtain Sobolev regularity on by controlling
for some appropriate value of θ.
This requires to be a bit more precise on the set where the initial data crosses μ. Specifically, we assume that there exists some constants and such that for any
Observe that when then by the Lipschitz bound on (which follows immediately from that on ), then
so that we can limit ourselves to .
For some which we later relate to θ and some constant C, denote
Observe that when then
We note that if then
Similarly if but or , then we have again
as has a minimum at but is strictly convex.
Hence by (31)
We therefore obtain that
by Lemma 3 and provided that leading us to take and . It is always possible to satisfy these inequalities provided that .
We can consequently exclude the case where when bounding (30).
The bound (28) also directly controls the case where (or vice-versa). Indeed in that case, we necessarily have that and has a sign between and so that there exists a constant C s.t. (again at least locally)
By our definitions of and and taking C large enough, this implies that
Therefore
by (28). This is bounded as long as .
We are finally able to focus on the case where for example both and . Note again that vanishes once with a change of sign at for . Therefore is injective on for some constant C and
Since on , this implies that for both and , we have
By a straightforward Hölder inequality, we get
by (28) again, provided that and . Since we chose , this last inequality holds provided that , which we can always impose.
To summarize, we have obtained the desired bound (30) provided that and together with .
Acknowledgements
The authors would like to thank the Institut Henri Poincaré for its support and hospitality during the program “Mathematical modeling of organization in living matter”. The authors also thank similarly the Isaac Newton Institute for Mathematical Sciences, Cambridge, for support and hospitality during the program “Frontiers in kinetic theory: connecting microscopic to macroscopic scales – KineCon 2022” where work on this paper was undertaken. This work was supported by EPSRC grant no EP/K032208/1. B.P. has received funding from the European Research Council (ERC) under the European Union’s Horizon 2020 research and innovation programme (grant agreement No 740623). P. E. Jabin is partially supported by NSF DMS Grants DMS-2049020, DMS-2205694, and DMS-2219397.
References
1.
G.Barles, Solutions de viscosité des équations de Hamilton–Jacobi, Mathématiques & Applications (Berlin), Vol. 17, Springer-Verlag, Paris, 1994.
2.
G.Barles, L.C.Evans and P.E.Souganidis, Wavefront propagation for reaction diffusion systems of PDE, Duke Math. J.61(3) (1990), 835–858. doi:10.1215/S0012-7094-90-06132-0.
3.
G.Barles, S.Mirrahimi and B.Perthame, Concentration in Lotka–Volterra parabolic or integral equations: A general convergence result, Methods Appl. Anal.16(3) (2009), 321–340. doi:10.4310/MAA.2009.v16.n3.a4.
4.
G.Barles and P.E.Souganidis, A remark on the asymptotic behavior of the solution of the KPP equation, C. R. Acad. Sci. Paris Sér. I Math.319(7) (1994), 679–684.
5.
K.Böttger, H.Hatzikirou, A.Chauviere and A.Deutsch, Investigation of the migration/proliferation dichotomy and its impact on avascular glioma invasion, Math. Model. Nat. Phenom.7(1) (2012), 105–135. doi:10.1051/mmnp/20127106.
6.
N.Champagnat and P.-E.Jabin, The evolutionary limit for models of populations interacting competitively via several resources, J. Differential Equations251(1) (2011), 176–195. doi:10.1016/j.jde.2011.03.007.
7.
M.G.Crandall, L.C.Evans and P.-L.Lions, Some properties of viscosity solutions of Hamilton–Jacobi equations, Trans. Amer. Math. Soc.282(2) (1984), 487–502. doi:10.1090/S0002-9947-1984-0732102-X.
8.
M.G.Crandall and P.-L.Lions, Viscosity solutions of Hamilton–Jacobi equations, Trans. Amer. Math. Soc.277(1) (1983), 1–42. doi:10.1090/S0002-9947-1983-0690039-8.
9.
O.Diekmann, P.-E.Jabin, S.Mischler and B.Perthame, The dynamics of adaptation: An illuminating example and a Hamilton–Jacobi approach, Theor. Popul. Biol.67(4) (2005), 257–271. doi:10.1016/j.tpb.2004.12.003.
10.
W.H.Fleming and P.E.Souganidis, PDE-viscosity solution approach to some problems of large deviations, Annali della Scuola Normale Superiore di Pisa-Classe di Scienze13(2) (1986), 171–192.
11.
I.Golding, Y.Kozlovsky, I.Cohen and E.Ben-Jacob, Studies of bacterial branching growth using reaction–diffusion models for colonial development, Physica A260 (1998), 510–554. doi:10.1016/S0378-4371(98)00345-8.
12.
A.Köthe, A.Marciniak-Czochra and I.Takagi, Hysteresis-driven pattern formation in reaction–diffusion-ODE systems, Discrete Contin. Dyn. Syst.40(6) (2020), 3595–3627. doi:10.3934/dcds.2020170.
13.
O.A.Ladyženskaja, V.A.Solonnikov and N.N.Ural’ceva, Linear and Quasilinear Equations of Parabolic Type, Translations of Mathematical Monographs, Vol. 23, American Mathematical Society, Providence, R.I., 1968, Translated from the Russian by S. Smith.
14.
K.-Y.Lam and Y.Lou, Reaction–Diffusion Equations: Theory and Applications, Lecture Notes on Mathematical Modelling in the Life Sciences. Springer International Publishing, 2022.
15.
J.-L.Lions and E.Magenes, Non-homogeneous Boundary Value Problems and Applications. Vol. I–III, Die Grundlehren der mathematischen Wissenschaften, Vol. 183, Springer-Verlag, New York–Heidelberg, 1972–1973. Translated from the French by P. Kenneth.
16.
A.Lorz, S.Mirrahimi and B.Perthame, Dirac mass dynamics in multidimensional nonlocal parabolic equations, Comm. Partial Differential Equations36(6) (2011), 1071–1098. doi:10.1080/03605302.2010.538784.
17.
M.Mimura, H.Sakagushi and M.Matsushita, Reaction–diffusion modelling of bacterial colony patterns, Physica A282 (2000), 283–303. doi:10.1016/S0378-4371(00)00085-6.
18.
J.D.Murray, Mathematical Biology. II: Spatial Models and Biomedical Applications, 3rd edn, Interdisciplinary Applied Mathematics, Vol. 18, Springer-Verlag, New York, 2003.
19.
B.Perthame and G.Barles, Dirac concentrations in Lotka–Volterra parabolic PDEs, Indiana Univ. Math. J.57(7) (2008), 3275–3301. doi:10.1512/iumj.2008.57.3398.
20.
C.Surulescu and M.Winkler, Does indirectness of signal production reduce the explosion-supporting potential in chemotaxis–haptotaxis systems? Global classical solvability in a class of models for cancer invasion (and more), European J. Appl. Math.32(4) (2021), 618–651. doi:10.1017/S0956792520000236.
21.
K.F.Zhang and X.-Q.Zhao, Asymptotic behaviour of a reaction–diffusion model with a quiescent stage, Proc. R. Soc. Lond. Ser. A Math. Phys. Eng. Sci.463(2080) (2007), 1029–1043.