We present an optimal control problem associated to a chemical transportation phenomena in a periodic porous medium. Posing controls on the porous part of the medium (distributed control), we set up a convex minimization problem. The main objective of this article is to characterize an arbitrary control to be an optimal control. We establish a relation between the optimal control and the corresponding adjoint state. At first, we analyse the microscopic description of the controlled system, then we homogenised the system by rigorous two-scale convergence method and periodic unfolding method.
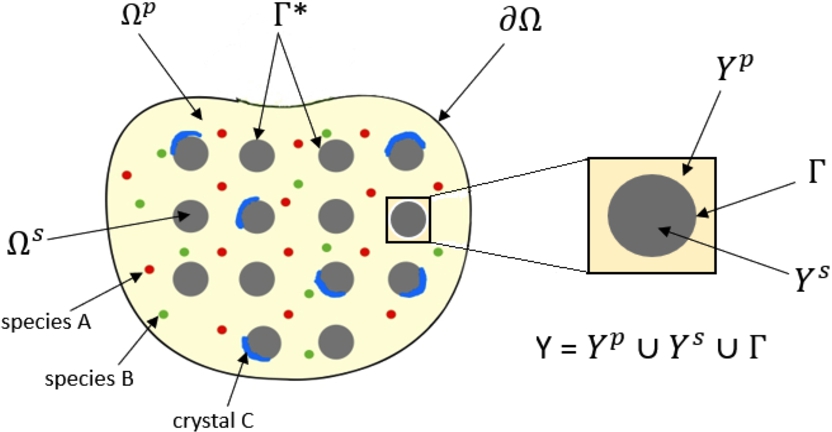
In this article, we consider an optimal control problem associated to a chemical transportation phenomena in a porous medium Ω. Let two mobile chemical species A, B are present in the porous part and a crystal C is present on the surface of solid matrices (see Fig. 1). They are connected via following reaction
This optimal control problem is concerned with the minimization of a cost functional , where
and subject to the state equations
where , and w are the concentrations of A, B and C, respectively. For , with the control variables , we aim to achieve the given desired states in -sense, where is a closed convex subset of . In general, the control variable acts like either a source or a sink term in the optimal control problem. In the context of our problem, when , we inject chemical agent from outside and means extraction of chemical species from the system.
In this article our main objective is to find a control (optimal), which minimizes the cost functional . Later this minimization analysis leads us to a relation between optimal control and the corresponding adjoint state. We start with a microscopic description of the controlled system (see (1.2a)–(1.2f)). Then, we upscale the system to a macroscopic description via periodic homogenisation. For the existence of the solution of the controlled system (state equations), we use some fixed point techniques shown in [12,20]. Unfortunately, we are unable to find the positiveness of the solution as the nature of the control variable in terms of positiveness is completely unknown to us. For homogenisation part, we assume that the porous medium has periodic structure to avoid the geometric complexity. We first obtain an anticipated macro-structure by asymptotic expansion method see [16], although we also use rigorous two-scale convergence method and periodic unfolding method, cf. [1,8,14,23,25,26] and references therein. The two-scale convergence of the nonlinear term on boundary is not straightforward and required some delicate tools to deal with it. Final aim of this paper is to show the convergence of optimal solution (optimal control and the corresponding state) from microscopic to macroscopic description (see Theorem 2.3). Now, we move to the next section to get familiar with the microscopic description.
Mobile species A and B in with crystal C on .
Micro-model equation
Let be a bounded porous medium with the pore space and union of the boundary of solid parts such that , . Let and denote the union of the boundaries of solid parts and the boundary of the domain, respectively. Further assume that domain Ω is periodic and covered by finitely many unit representative cells , where Y is composed of (solid part) with boundary Γ and (pore part) such that and . For , , , and such that , , , . To avoid technical glitch, we assume that the solids parts do not touch the boundary as well as the boundary of Y. Let be the scale parameter and Ω be covered by a finite union of cells such that for , , , . Also, is defined by . We denote by and the volume elements in Ω and Y, and by and the surface elements on Γ and , respectively. , denotes the time interval. Now, let the microscopic concentrations of A, B and C are , and , respectively. Further assuming that there is no interaction happening between the chemical species on the outer boundary and precipitation of crystal forms on the solid matrices at pore scale level. Then
where are the diffusion coefficients and are distributed control variable for concentrations for , k is the precipitation rate constant. We denote (1.2a)–(1.2f) by . Let be closed convex, called admissible control set. For , let a cost functional defined by
Where and is a solution of the problem (1.2a)–(1.2f). An optimal control problem is to find , where is the solution of (1.2a)–(1.2f) and . Our main goal is to do the limiting analysis of .
The brief layout of this paper is as follows: in Section 2, we state our main theorems and collect all the necessary mathematical tools for our proposed problems. In Section 3, we obtain the existence of the solution of the diffusion–reaction–precipitation system (Theorem 2.1). The existence of optimal control and its characterization are studied in Section 4 (Theorem 2.2). In Section 5, we obtain an anticipated upscaled model by asymptotic expansion method. Then we study the limiting analysis and the convergence theorem (Theorem 2.3) in Section 6.
Mathematical preliminaries and problems description
Let and , be such that . Assume that and , then the standard notations and denote the Lebesgue space and Sobolev space with their usual norms. For , we denote . Similarly, , and are the Hölder, real- and complex-interpolation spaces respectively endowed with their standard norms, for definition confer [13,18]. denotes the set of all Y-periodic β-times continuously differentiable functions in y for . The symbol represents the inner product on a Hilbert space H and denotes the corresponding norm. For a Banach space X, denotes its dual and the duality pairing is denoted by . Since is space of all continuously differentiable functions with compact support in Θ, then the closure of is . The symbols ↪, and denote the continuous, compact and dense embeddings respectively. we define the function spaces , , and . We make the following assumptions for the sake of analysis of .
Let the assumption A1–A5 be satisfied. A triplet is said to be weak solution of (1.2a)–(1.2f) such that for all , and
for all , and .
We are now going to state main theorems of this paper which are given below. From time to time, we will use the notation, , , and , where ∗ is used in the sense of optimality.
Let the assumption A1–A5 be satisfied, then there exists a unique weak solutionofwhich satisfiesfor a.e.,’s are constants independent of ε and.
Let the assumptions A1–A5 hold true. Ifis the solution of the problem, then, the optimal control,, whereis the solution of adjoint problemfor i, j = 1, 2 (i ≠ j) and it satisfies the optimality conditionConversely, ifandsolve the systemandfor i, j = 1, 2 and. Then,is the optimal solution of.
The homogenised problem , is given by: find the , where is the solution of the problem
where , are upscaled form of (see next theorem), and . The cost functional is given by
Let the assumptionshold true. Then, there exists limit functions,of,andfor, defined in the sense of Lemma (
6.3
), such thatis the optimal control of the functional (
2.8
) andis the solution of the (upscaled) adjoint problemwhereMoreover,Conversely, ifsolves the systemandthen the tripletsolves the optimal control problem.
Existence of solution of
For;satisfies the following estimate
Choose as test function in the weak formulation (2.1a), then
where γ is the Young’s inequality constant. Now, by assumption A4 and the trace inequality Lemma A.2 on the boundary term , we obtain
where C and are arbitrary constants independent of ε. As , this leads (3.3) to
We take , to obtain
□
Now, applying Gronwall’s inequality
Similarly for , estimate (3.4) implies
Now for the remaining estimate, take an arbitrary and by trace inequality Lemma A.2
where is an arbitrary constant independent of ε, then it follows that
Hence from Lemma 3.2 required estimation can be derived.
The solutionsatisfies.
Choose as test function for (2.1b) and by the assumption A4, we obtain □
where is an arbitrary constant independent of ε. Then Gronwall’s inequality leads (3.4) to
Next choose as test function for (2.1b) to get the remaining estimate.
Now, we obtain the solution of . Let consider the following closed and convex sets
Existence of solution of (2.1a)–(2.1b) is motivated from nested concept of Banach fixed Point theorem, cf. Theorem 3.1 in [6] and Lemma 3.80 in [17]. The statement is: for arbitrary , consider the equation (2.1b) with , then by Picard–Lindelöf theorem there exists a unique solution of (2.1b), since r.h.s. of (2.1b) is Lipschitz. Again for and (2.1a) with has a unique solution where is a contraction map with unique fixed point in . In this way, for ; the equation (2.1a) has solution where is a contraction map and has a fixed point in . Clearly these fixed points of contraction maps define a solution of (2.1a)–(2.1b).
Let with be the corresponding solution of (2.1b). Further we denote
By Trace inequality of on (see Lemma A.2), we have
where is independent of ε.
If,are two solutions of (
2.1b
) andthen for a.e.we have,where,is the trace inequality constant andis the Lipschitz constant.
Choose as a test function in the weak formulation (2.1b), which yields
Now locally Lipschitzness implies
By Young’s inequality and Trace inequality of on , we obtain
Hence from (3.8),
By Gronwall’s inequality, (3.9) reads like
Again, choose as test function in (2.1b) and proceed in the similar fashion as above to get the estimate . □
For alland(fixed)wherefrom Lemma
3.4
,and μ are the trace inequality and Young’s inequality constants, respectively such that.
Taking (2.1a) for the difference and choosing as test function for arbitrary yields
As , we have
and trace inequality A.2 gives
Hence, we obtain
Take to get
Now, the monotonicity of and integrating with respect to t forms the required first estimate and using this estimate we obtain the gradient estimate. □
Now,
Putting yields,
where and the constants , are independent of the initial data. Hence, in (3.10), doesn’t depend on the initial data. Now if, i.e., , then becomes a contraction mapping on the closed set and hence by Banach’s fixed point theorem has a fixed point (say) in this set. By Lemma 3.3, and satisfies its a-priori estimates. Now, with . So, can be used as initial condition for extending the time interval of existence. Since μ is independent of initial condition, we can get a fixed point of for a.e. .
The fixed pointofbelongs toexists uniquely and satisfies the following estimates
Assume that be an arbitrary and a sequence is constructed by the iterations , , which becomes a Cauchy sequence in . Now is closed subspace in a Banach space and hence complete. So, there exists such that converges to as . Again,
This implies i.e., is a fixed point of . For , is contraction map, hence it has a unique fixed point . Now is uniformly bounded in hence, it has a weakly convergent subsequence with as a weak limit. By construction all satisfy the initial and boundary conditions and
for all and satisfies
for all with is initial data. By Lemma 3.4, the sequence converges strongly to a limit in . We can pass to the limit in (3.11) and (3.12) and then obtain as a solution of the problem related to (2.1a)–(2.1b) for i=2.
: Let and be two solutions of the problem related to the equations (2.1a) and (2.1b). Assume and . By Lemma 3.4
Now take as test function in (2.1a) and using trace inequality, we obtain
where constants and are independent of ε. Setting implies . Hence, from Gronwall’s inequality
From (3.13), we have
□
Now for existence of solution of (2.1a) for and (2.1b), define contraction operator and proceed in the similar way as before.
Instead of considering the assumption A4, one can take polynomial type growth of the nonlinear precipitation term i.e.,
where (independent of ε) and , (see [15,22,27]). Then, following in the similar fashion as in Lemmas 3.1 and 3.2, required estimates can be obtained. Indeed, for choose as test functions in the weak formulation (2.1a), then
where constants , are independent of ε. Now, adding the above inequalities and by the Gronwall’s inequality one can obtain the required estimates.
Optimality condition
There exist a uniquesuch that the minimization problemwill attain it’s infimum.
Let . Since , there exist a sequence such that . Without loss of generality, we can assume that , then Lemma 3.1 implies . Thus up to subsequence, there exists a subsequence of , still indexed by n and a function s.t. converges to for the weak topology of . Using the fact the mapping is weakly lower semi continuous in , then we have
Since is continuous and linear operator, is also continuous in weak topology sense. This implies converges to for the weak topology of . Since compactly, converges to for the weak topology of . Then
Combining (4.1) and (4.2) to get the existence of the optimal control problem (), i.e.
The uniqueness follows from the convexity of . □
Now, we obtain the optimality condition for microscopic description of the optimal control problem , which is motivated from [28].
Step 1. Let . Then, by the optimality condition
Here our aim is to find
Now,
Let , and , then is a solution of
Where and .
Now, we want to show that in as . Choose as test function in (4.5a), then using the assumption A4, trace inequality A.2 and Gronwall’s inequality, we obtain
where constant C is independent of ε and this estimate implies the required limit. Now, set , then is a solution of
where and . We take limit on both sides of (4.4)
Now, if a is a solution of the adjoint system
where and . Then from (4.8) and the adjoint system (4.9a)–(4.9d), we get
which gives the optimality condition as
Furthermore, since
Step 2. Existence of solution of (
2.3a
)–(
2.3d
) and (
2.5a
)–(
2.5f
): Note that PDE (2.3a)–(2.3d) is a terminal value problem (TVP). To show the existence of the solution of TVP, we substitute , then
Now, the existence of solution of above PDE is similar to the existence Theorem 2.1. Again, the existence of solution of (2.5a) together with boundary and initial conditions is directly follows from Theorem 2.1.
Step 3. Conversely: From the previous calculations, we have for every , where is the solution to the adjoint problem. Thus, if satisfies the optimality system then we have . Thus, it follows that is the optimal control to the problem . □
An anticipated macroscale model
In this section, we try to find an anticipated upscaled (macroscale) model of (1.2a)–(1.2f) and (2.3a)–(2.6d) by asymptotic expansion method (see [16]).
Let us take: (i) ; (ii) ; (iii) ; (iv) ; (v) , where each , , , and are Y-periodic in y.
Step 1. For , from (1.2a) and (1.2c), we obtain
Now comparing the coefficient of on the both sides of (5.1) and the coefficient on the both sides of (5.2), we get
Again, comparing the coefficients of on both sides (5.1), we obtain
This implies that , where, for each ; is the Y-periodic solution of the cell problem
Further comparing the coefficients of on both sides of (5.1) and integrating w.r.t. y to obtain
For more simplification of (5.4) we compare the coefficient of ε on both sides of (5.2) in order to obtain and this can be used to rewrite the integral
Thus, (5.4) reduces to
Putting the value of
where
For the boundary conditions, we equate the coefficient of on both sides of (5.2) and integrating w.r.t. y to get
Similarly comparing the coefficient of from
to obtain
Initial conditions become and .
Step 2. From (2.3a)
here is a linear state-control operator. Comparing the coefficient of on both sides of (5.8) and continuing the similar fashion as in step 1, we obtain
where for each , is the Y-periodic solution of the cell problems
Again, comparing the coefficients of on both sides of (5.8) to obtain
We integrate the last equation w.r.t. y, then
As in step 1, we can show that . Hence, from (5.9)
where
For terminal condition, we equate the coefficient of on both sides of (2.3d)
Similarly, from boundary condition we obtain
Homogenisation of
In this section, we obtain the homogenised version of the microscale optimal control problem . Two-scale convergence, introduced in Appendix, is a type of weak convergence in some -space. The idea of two-scale convergence resides on the assumption that the oscillating sequence of functions are defined over some fixed domain, say Ω and we have boundedness of such sequence of functions in for some p. Since there is no oscillation in , we are only focused on the oscillation in . As our microscale solution , are defined over , in order to apply two-scale convergence we need to obtain the a-priori estimates for , , , , , and etc. in for some p or in some other appropriate space. This is not so straightforward. Usually, we first obtain the estimates for , in , and then use the extension operator defined in Lemma A.1 to extend these estimates to all of . In order to extend these estimates, we first begin to extend the function from to by some reflection operator and then by a simple argument we perform the extension from to . We denote the extended function into all of by , however, from here on we will drop the hat notation and simply use and for the extended function. We first start with some estimates of the solution of and adjoint equation (2.3a)–(2.3d) which are given below.
There exists a constant C, independent of ε, such that ∀ and ∀
There exists an extension of the solution,into all of, still denoted by same symbol, such that ∀ and ∀ ε
The proofs of Lemmas(6.1) and (6.2) follow from Theorem 2.1 and Lemma A.1.
Let,satisfies the estimate (6.2) andsatisfies the estimate (
6.1
), then there exists functions,andsuch that up to a subsequence, still denoted by same symbol, the following convergence results hold:
andare weakly convergent toand, respectively in.
andare two-scale convergent toand, respectively.
andare two-scale convergent toand, respectively.
andare two-scale convergent toand, respectively in.
The proofs of (i)–(iii) follow straightaway from estimate (6.2), Lemma A.6 and the proof of follows from Lemma A.8. □
There exists a functionsuch thatfor.
The extension of from to all of follows from Lemma A.1. The rest of proof follows from assumption A3 and Lemma A.6. □
Letbe a bounded sequence inand weakly convergent into a functionfor all. Suppose further that the sequenceis bounded in. Then, the sequenceis strongly convergent to the functioninfor all.
The proof follows from Lemma 3.1 and Theorem 2.1 in [21]. □
Now in order to pass the two-scale limit in (1.2d), we would require the limit of on . For this, we first prove the strong convergence of in then we will employ the boundary unfolding operator.
The following convergence results hold:
The sequenceandare strongly convergent toandrespectively infor.
The productis two-scale convergent toin.
The productis two-scale convergent toinfor.
For , the Sobolev space where and space by Lemma A.4. Now from Lemma 4.2 in [11], we obtain
Hence we get,
Now compact embedding of in yields
Similar argument goes for . Now
Hence from Lemma A.2 and the above boundary strong convergence, we obtain
Now use Lemma A.11 and Lemma A.10 to get
Proceeding as before (iii) can be proved. □
Convergence analysis of () Step 1: Let us consider the functions and such that . Using η as test function in the weak formulation (2.1a) to obtain
Now we pass the two-scale convergence limit in (6.3) term by term.
Combining (6.4), (6.5), (6.6) and (6.7), we get
Now choosing , then and the equation (6.8) reduces to
Let us choose , where is any arbitrary function of x. For each ; is the Y-periodic solution of the cell problem
On the other hand, if is the solution of the cell problem (6.10), the equation (6.9) is satisfied if . Choosing then the equation (6.8) reduces to
Substituting the value of
in above equality to obtain
where
Now, for boundary condition, taking as test function in the weak formulation (2.1b), we obtain
By using Lemmas 6.3 and 6.6, passing ,
Initial condition becomes
Step 2: Again, we choose η as test function in the weak formulation of (2.3a) to get
Now, passing the two-scale convergence limit in (6.13) term by term.
Combining (6.14), (6.15), (6.16) and (6.17), we have
Now, choosing , then the equation (6.18) reduces to
Let us choose , where is any arbitrary function of x. For each ; is the Y-periodic solution of the cell problems
On the other hand, if is the solution of the cell problem (6.20), the equation (6.19) is satisfied if . Choosing then the equation (6.18) reduces to
Substituting
in (6.21) to get
where is given by (2.10) and .
Now let such that . Then, from (2.3a), we obtain
Taking two-scale limit on both sides, we have
We now combine (6.23) with the weak formulation of in Step 2 to obtain
Similarly,
Step 3: In this last step we prove the third theorem. Take . Let be the solution of the equation (1.2a), then from Lemma (3.1), we get
Furthermore, since is the optimal solution of , , this implies
Now, from the Lemma (3.1), we obtain
We employ the Lemma A.1 and Theorem 2.1 in [21] to obtain that strongly which implies that the two-scale limit of is independent of y, i.e. . Moreover, , where and . Now, we pass the two-scale limit in the state-control equation (1.2a)–(1.2f) for and proceed as in step 1, we obtain
where , are mentioned in step 1, and , . We note that the two-scale limit of the adjoint problem is already shown in step 2. Finally, we will show that if ( is from (2.7a)), then our proof will be done. Now one can easily check that satisfies the differential equation (2.7a) for . From the optimal control solution, we have
The last limit shows that any , given by (6.29), will solve an optimal control problem of type (2.7a)–(2.8). Therefore, , . This finishes the proof of Theorem 2.3.
Conclusion
In this article, we have considered a coupled micro-scale model of diffusion–precipitation system consists of only crystal precipitation on . We have shown the existence of solution of the micro scale model under certain assumptions. We also obtained the optimal control for problems . Finally, we were successfully able to obtain the macroscale description of the micro-model and showed the convergence of the optimal control. To our knowledge, this is one of the new results that has been addressed in this context. The assumption A4 seems to be a rather strong one but we are hoping to relax this condition in our next work. Our model can be further extended to crystal dissolution–precipitation model i.e., a reversible reaction system on , which will be addressed elsewhere.
Footnotes
Acknowledgement
The authors express their appreciation to the anonymous reviewer for valuable feedback, which significantly contributed to improve the initial manuscript. The first author Mr. Arghya kundu would like to thank National Board of Higher Mathematics, India (Ref. No-0203/11/2019-R&D-ll/9247) for fellowship during his doctoral work. The second author would like to thank SERB DST for their funding under the program Core Research Grant (File number: CRG/2020/006453).
Appendix
Similarly, one can define the extension operator from to , cf. [1,2,19,23,26].
we denote , and → the two-scale, weak and strong convergence of a sequence respectively. The proof of next lemma is given in [23,25].
Time dependent periodic unfolding operator on The unfolding operator technique is used to deal with the homogenisation problems with non linear terms. It is built on the notion of periodic unfolding method (cf. [4,7,9,10]).
References
1.
G.Allaire, Homogenization and two scale convergence, SIAM Journal on Mathematical Analysis23(6) (1992), 1482–1518. doi:10.1137/0523084.
2.
G.Allaire, A.Braides, G.Buttazzo, A.Defranceschi and L.Gibiansky, in: School on Homogenization, Lecture Notes of the Courses Held at ICTP, Trieste, 1993, pp. 4–7.
3.
G.Allaire, A.Damlamian and U.Hornung, Two-scale convergence on periodic structures and applications, in: Proceedings of the International Conference on Mathematical Modelling of Flow Through Porous Media, pp. 15–25.
4.
M.Amar, D.Andreucci and D.Bellaveglia, The time-periodic unfolding operator and applications to parabolic homogenization, Rendiconti Lincei28(4) (2017), 663–700.
5.
G.Auchmuty, Sharp boundary trace inequalities, Proceedings of the Royal Society of Edinburgh Section A: Mathematics144(1) (2014), 1–12. doi:10.1017/S0308210512000601.
6.
K.Chelminski, D.Hömberg and D.Kern, On a thermomechanical model of phase transitions in steel, WIAS Preprints1225(1225) (2007).
7.
D.Cioranescu, A.Damlamian, P.Donato, G.Griso and R.Zaki, The periodic unfolding method in domains with holes, SIAM Journal on Mathematical Analysis44(2) (2012), 718–760. doi:10.1137/100817942.
8.
D.Cioranescu and P.Donato, An Introduction to Homogenization, Vol. 17, Oxford University Press, Oxford, 1999.
9.
D.Cioranescu, P.Donato and R.Zaki, Periodic unfolding and robin problems in perforated domains, Comptes Rendus Mathematique342(7) (2006), 469–474. doi:10.1016/j.crma.2006.01.028.
10.
D.Cioranescu, P.Donato and R.Zaki, The periodic unfolding method in perforated domains, Portugaliæ Mathematica63(4) (2006).
11.
A.M.Czochra and M.Ptashnyk, Derivation of a macroscopic receptor-based model using homogenization techniques, SIAM Journal on Mathematical Analysis40(1) (2008), 215–237. doi:10.1137/050645269.
12.
C.J.V.Duijn and I.S.Pop, Crystals dissolution and precipitation in porous media: Pore scale analysis, Journal für die Reine und Angewandte Mathematik577 (2004), 171–211.
T.Fatima and A.Muntean, Sulfate attack in sewer pipes: Derivation of a concrete corrosion model via two-scale convergence, Nonlinear Analysis: Real World Applications (2012), 326–344.
15.
K.Fellner, J.Fischer, M.Kniely and B.Q.Tang, Global renormalised solutions and equilibration of reaction–diffusion systems with nonlinear diffusion, Journal of Nonlinear Science33(4) (2023), 66. doi:10.1007/s00332-023-09926-w.
16.
U.Hornung, Homogenization and Porous Media, Vol. 6, Springer Science & Business Media, 1996.
17.
D.S.Kern, Analysis and numerics for a thermomechanical phase transition model in steel, 2011.
18.
A.Lunardi, Analytic Semigroups and Optimal Regularity in Parabolic Problems, Birkhäuser Publication, 1995.
19.
H.S.Mahato and M.Böhm, Homogenization of a system of semilinear diffusion–reaction equations in an h 1, p setting, Electronic Journal of Differential Equations2013(210) (2013), 1–22.
20.
H.S.Mahato and M.Böhm, An existence result for a system of coupled semilinear diffusion–reaction equations with flux boundary conditions, European Journal of Applied Mathematics (2014), 1–22. doi:10.1017/S0956792514000369.
21.
A.Meirmanov and R.Zimin, Compactness result for periodic structures and its application to the homogenization of a diffusion–convection equation, Electronic Journal of Differential Equations2011(115) (2011), 1–11.
22.
J.Morgan and B.Q.Tang, Boundedness for reaction–diffusion systems with Lyapunov functions and intermediate sum conditions, Nonlinearity33(7) (2020), 3105. doi:10.1088/1361-6544/ab8772.
23.
M.Neuss-Radu, Homogenization techniques, Diploma thesis, University of Heidelberg, Germany, 1992.
24.
M.Neuss-Radu, Some extensions of two-scale convergence, Comptes rendus de l’Académie des sciences. Série 1, Mathématique322(9) (1996), 899–904.
25.
G.Nguetseng, A general convergence result for a functional related to the theory of homogenization, SIAM Journal on Mathematical Analysis20(3) (1989), 608–623. doi:10.1137/0520043.
26.
M.A.Peter, Homogenisation in domains with evolving microstructure, Comptes Rendus Mécanique335(7) (2007), 357–362. doi:10.1016/j.crme.2007.05.024.
27.
M.Pierre, Global existence in reaction–diffusion systems with control of mass: A survey, Milan Journal of Mathematics78 (2010), 417–455. doi:10.1007/s00032-010-0133-4.
28.
J.P.Raymond, Optimal control of partial differential equations. Université Paul Sabatier, lecture notes, 2013.
29.
R.E.Showalter, Microstructure Models of Porous Media, Homogenization and Porous Media, Springer Publication, 1997, chapter 9.