
Abstract
BACKGROUND:
Human beings regularly walk over even and uneven surfaces during their daily activities. A human being with lower limb disability needs an exoskeleton to walk independently. However, walking surface irregularities increase the risk of falling of exoskeleton users. This falling tendency can be minimized by balancing the exoskeleton on irregular surface profiles against the gait cycle variation. Gait variation is studied using quality EMG signals obtained from the gastrocnemius and hamstring muscle activity during uneven surface walking.
OBJECTIVE:
The present study compares the activity of hamstring and gastrocnemius muscles during walking on a treadmill, utilizing both even and uneven planes.
METHODS:
Integrated electromyography signals from eight healthy male subjects are collected while walking on a treadmill, even and uneven planes. Muscle activity variation on these planes is studied using two-way ANOVA with replications.
RESULTS:
The results show that hamstring muscle activity registers a sound variation in swing phase but has no variation in stance phase over all three planes, whereas gastrocnemius muscle activity changes between swing and stance phases over even and uneven planes during forward walking.
CONCLUSIONS:
The results illustrate that the gait cycle variation depends on surface irregularities which indicates the importance of surface consideration.
Introduction
Walking is necessary for all human beings to perform their daily activities. For different patterns of walking, the leg muscles are utilized differently, with non-identical contractions and coordination. Various investigators have developed the rhythmic sequence in the nervous system for these dissimilar walking patterns by central pattern generators (CPGs) [1–4]. CPG neurons fire periodically in diverse patterns and phase proportions. The generated patterned signals are distributed to motor neurons (motor neurons become the elements of CPG in certain situations) and to the leg muscles. Corresponding to the behavior of motor neurons and muscles, plasticity exhibited by the CPGs adjusts its basic pattern or even rebuild CPG totally to adapt through different muscle responses [1,4–6]. This nonlinear behaviour in muscle contraction amplitude is achieved when the motor neuron fire through neuromuscular transform (NMT). By tuning the NMT through peripheral neuromuscular plasticity and modulation, different possible muscle contractions could be achieved [7].
Stance and swing phases of a gait cycle are controlled by these muscle contractions, and as a result, electromyography (EMG) signal is obtained as output. Need for distinct muscle contractions occurs when there is a disturbance on the walking plane. Parameters that deviate the normal gait cycle include terrain, height variations on surfaces, damping coefficient, the coefficient of friction and geometrical shapes [8]. Dingwell et al. [9] proved that, during walking, gait variability and gait stability varies significantly between motorized treadmill and a levelled even surface. Andrysek et al. [10] compared reaction forces and moments during walking on surfaces such as mulch, gravel, grass, rocks, and sand with level ground walking. Moreover, walking on the irregular surface is more energetically costlier than regular level surface walking [8,11]. Hence, muscle contractions are distinct for a person walking on a treadmill with even and uneven planes. These discrete muscle contractions on different planes distort the gait cycle from the usual one.
The force transferred from heel to the knee joint during the heel strike is balanced internally by the muscle forces developed in the leg. The internal forces include those forces developed in four main ligaments and at three major muscles (quadriceps femoris, hamstrings, and gastrocnemius) which are directly transmitted across the joints. Among the three major muscles, the hamstring muscle flexes the knee and hip joints during swing phase, and thus require substantial power for knee flexion and a lesser power for hip flexion. In contrast, gastrocnemius muscle transfers the dissipated energy at the knee joint to the ankle joint when walking up the inclined plane and hence save power that has to be developed by soleus muscle for flexing the ankle joint. Moreover, during walking on the even level plane, gastrocnemius muscle gives strength to both ankle and knee joint instantly and the evidence for the energy transfer is difficult to be proved [12].
Hamstring muscle undergoes recurrent injuries during running, kickboxing, and long jumping. In addition to this, hamstring muscle undergoes active stretch due to contraction during running gait late swing phase [13]. Hamstring and gastrocnemius muscles generate a substantial force for the flexion and extension of the knee and hip joints while running and walking. Hence, these muscles play a major role in maintaining normal gait during walking. The gait cycle deviation while walking on different planes can be studied by observing the response of these muscles [14].
Numerous comparative studies were conducted by researchers on the deviation in the gait cycle over the even surface, uneven terrain and treadmill by video analysis methods and accelerometers. Though the study of gait cycle using video analysis and accelerometers are popular, the accuracy and precision of such studies solely depend on marker and accelerometer fixing methods on the human body. The relative movement between skin, on which the markers/accelerometers are fixed, and muscles over the joints can affect the accuracy in data acquisition using video analysis method and accelerometer. The measurement of this relative movement adds error to the actual measurement of gait cycle variables. Therefore, careful installation of markers/accelerometers owing to intensive computation of data acquisition systems is to be ensured.
To improvise the accuracy of the measurement of gait cycle parameters, few researchers have substituted gait cycle study using video analysis methods and accelerometers with muscle EMG. They have used EMG data of leg muscles to determine the gait cycle parameter viz., changes in joint angle and muscle forces [15–17]. To determine the percentage change in gait cycle parameters, the measured EMG data of below-hip muscles are compared with the EMG data of a healthy person [18] and the percentage change in the EMG data is represented as the muscle error. Muscle errors can be caused due to muscle diseases. Muscle diseases are one among many factors that make changes in normal gait parameters. The variation of gait cycle from the normal is due to the diseased muscle and the diseased muscle variation should be studied to get an in-depth understanding of the reason for the gait cycle variation. The advantage of using EMG to study the gait parameters than using video analysis methods and accelerometers is that the impaired muscles that make changes in walking gait parameters can be easily identified [18–20]. Hence, the gait data can be measured more accurately from the measurement of these activations than with other third-party methods or devices.
Although EMG is used to study gait parameters and muscle forces on a levelled even surface, no studies have yet investigated how the walking gait parameters on the even plane are different from an uneven plane and treadmill. In the present work, the authors have investigated the deviation in walking gait cycle over the even surface with that of uneven and treadmill in forward and reverse direction by utilizing the EMG data of gastrocnemius (medialis) and hamstring muscle (biceps femoris). The authors hypothesize that there is a significant variation in natural walking gait cycle over treadmill, even and uneven planes.
Methods
Materials
In the present study, electromyography (EMG) in gastrocnemius and hamstring muscles are recorded during forward walking on a treadmill, and forward and reverse walking on even and uneven surfaces (Fig. 1a). A fully conditioned straight motorised treadmill (Physique PL200, Physique Training Equipment Ltd., UK) set at a walking speed of 1.2 m/s has been used for this study. An even platform is constructed with galvanized iron square pipe structure as the base (dimension: 370 × 70 cm). The square pipe structure is covered with a flat plywood sheet (size: 370 × 70 cm) and a polyvinyl form (PVF) of thickness 2 mm is glued over it. The PVF covering is meant for making the walk over the structure comfortable. A detachable uneven platform (Fig. 1b) is constructed with four similar square wooden prisms (dimension: 15.2 × 15.2 cm) of heights 0, 1.27, 2.54, and 3.81 cm respectively, in ascending order of their heights over a separate flat plywood sheet (dimension: 370 × 70 cm).
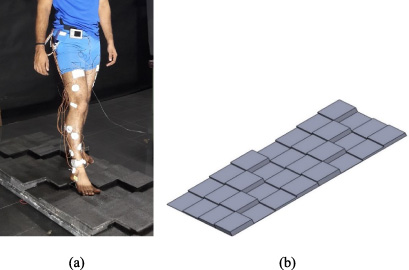
(a) Subject walking on an uneven platform, (b) Three-dimensional view of uneven platform.
Eight healthy male subjects (age: 27 ± 2.1 years, mass 65 ± 11.5 kg and height 168.2 ± 5.2 cm) participated in this study. Written consent forms have been signed by every individual who took part in this study. All protocols were approved by the local Research Ethical Committee before the commencement of the experiments. Each subject was instructed to take initial walking on the treadmill (speed = 1.2 m/s) and subsequently on level even and uneven planes at their natural cadence in both forward and reverse directions. A rehearsal was taken by every subject before starting the experiment. Five trials of walking were made by every subject on each plane in both forward and reverse directions. An initial starting point was marked at a distance of 60 cm away from one end of the platform. All subjects were instructed to start walking from this point to attain their natural cadence before stepping over the platform. This distance is termed the initial clearance. Similarly, the finish point was set to 60 cm beyond the other end, defined as final clearance. The difficulty in attaining natural cadence while walking over this short length of the platform has been overcome by providing this clearance at the initial and final stages of walking.
Data acquisition
Gastrocnemius and medial hamstring muscle EMG are recorded by plugging two EKG sensors (EKG-BTA, Vernier USA) to the disposable silver chloride reference electrodes (size 40 mm diameter) placed on these muscles. Electrodes are located based on instructions from SENIAM international standards (seniam.org) [21]. For a perfect quality SEMG signal recording, there must be a good electrode-skin contact. Before placing the electrode, the skin is properly shaved and cleaned with alcohol for reducing the skin impedance. Data were acquired at 10 kHz sampling rate (Butterworth filtered: 20 to 400 Hz) with NI USB 6363 data acquisition card through LabVIEW software. Movements over the treadmill, even and uneven planes on the sagittal plane are recorded with a motion detection camera mounted on a tripod placed in front of these planes on the floor. Surface EMG data of hamstring muscles were collected while walking in (i) forward direction on treadmill, even and uneven planes (Fig. 2a), (ii) reverse direction on even and uneven surface (Fig. 2b), and (iii) gastrocnemius surface. EMG was collected during forward and reverse walking on uneven and even planes (Fig. 2c). Reverse walking on treadmill is intentionally omitted to avoid the risk of fall during natural walking.
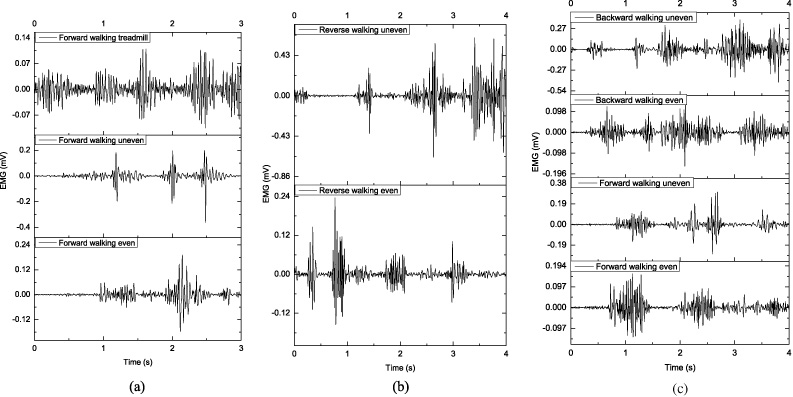
(a) Hamstring surface EMG collected while walking on treadmill, even and uneven planes, (b) Hamstring surface EMG acquired during reverse walking on even and uneven planes, (c) Gastrocnemius surface EMG recorded for forward and reverse walking on even and uneven planes.
Motion detection camera recorded data were analyzed, with the help of Kinovea software to find joint velocity and distinguish swing and stance phase. The ANOVA with replications is conducted to find the significance of hamstring and gastrocnemius muscles activity (average integrated EMG) and Cohen’s d tests for calculating the effect size (muscle effort) while walking in forward and reverse directions on even, uneven, and treadmill. Cohen’s d test is calculated as the difference in the two groups’ mean divided by the average of their standard deviations.
The hamstring and gastrocnemius muscle activity and its effects during walking over three different planes are compared either between three planes or two walking phases for both forward as well as backward walking directions. Even plane, uneven plane and treadmill are the three planes and swing and stance phases are the two phases of walking. The factors considered for comparison study of muscle activity of hamstring and gastrocnemius among three planes and two walking phases are: significance of muscle activity (ANOVA) and its effect size (Cohen’s d test).
In case of hamstring muscles, first comparison of muscle activity is made among the three planes for swing as well as stance phases of walking in forward direction. However, as Cohen’s d test is restricted to apply on not more than two samples; it cannot be performed on this comparison involving three planes to find the effect size. Hence, the comparison is made by performing one-way ANOVA alone. Second comparison of muscle activity is made between swing and stance phases of forward walking on all three planes. Further, comparisons of muscle activity are made between the groups, even and uneven planes, even plane and treadmill and swing and stance phases for forward as well as reverse walking respectively.
Nevertheless, in case of gastrocnemius muscle, muscle activity of the gastrocnemius muscle is tested only for even and uneven planes. The comparison of gastrocnemius muscle activity during walking is made between the groups, even and uneven planes and swing and stance phases during forward and reverse walking respectively.
Results
Hamstring muscle
Raw values of average integrated electromyography (iEMG) and peak iEMG (minimum and maximum values) of hamstring muscle in percentage are plotted for swing and stance phase of forward walking respectively and represented in Figs 3(a) and 3(b), whereas Figs 3(c) and 3(d) represent the corresponding iEMG values of hamstring in reverse direction.
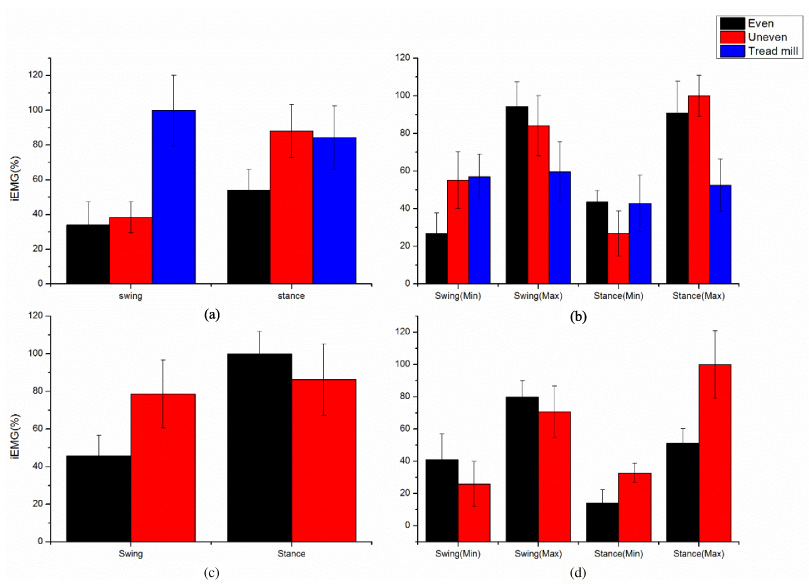
Hamstring muscle iEMG during forward walking condition on even plane, uneven plane, and treadmill: (a) Average iEMG value, (b) Peak iEMG value. Hamstring muscle iEMG during reverse walking condition on even and uneven plane: (c) Average iEMG value, (d) Peak iEMG value.
One-way ANOVA is performed separately (Table 1) over the average iEMG values of hamstring muscle generated during swing and stance phase while walking on the even plane, uneven plane, and treadmill in the forward direction. A significance (p = 0.036) in hamstring muscle activity is observed between even plane, uneven plane and treadmill walking during swing phase. The percentage variation of average iEMG in uneven and treadmill surface over even plane are 12.5% and 67%. On the other hand, an insignificant variation (p = 0.148) in hamstring iEMG is observed on these surfaces during the stance phase and the percentage of variation in uneven and treadmill over even plane are 35% and 31%.
One-way ANOVA and Cohen’s d test performed on average hamstring iEMG values and its standard deviation on even plane, uneven plane, and treadmill for swing and stance phases of forward and reverse walking gait cycles
∗ Mean (SD); # muscle activity comparison between even uneven treadmill; ## muscle activity comparison between swing and stance phases.
In reverse walking, there are no significant differences in hamstring muscle activity over the even plane, uneven plane and treadmill walking for a complete gait cycle. The average iEMG change of uneven plane is 33% for swing phase and −14% for stance over even plane. Moreover, the muscle activity is not substantial during swing and stance phases, either. This is supported by Cohen’s d values, 0.757 for swing phase and 0.206 for stance phase. The effect size of hamstring muscle activation is at a medium-large scale during swing phase while small-medium scale activation happens during stance phase. To study the iEMG variation between two surfaces among the two planes and treadmill, one-way ANOVA and Cohen’s d test (Table 2) are carried out separately.
One-way ANOVA and Cohen’s d test performed on average hamstring iEMG values and its standard deviation on even and uneven plane for swing and stance phases of forward walking gait cycle
∗ Mean (SD); #muscle activity comparison between even and uneven; ## muscle activity comparison between swing and stance phases.
During both swing and stance phases of forward walking gait, the variation in hamstring muscle activity on even and uneven planes are not highly distinguishable (Table 2). The Cohen’s d value supports this by providing a small effect size for the swing phase and large effect size for stance phase (p = 0.005, Cohen’s d = 1.273). However, a significant variation (p = 0.005) is observed between swing and stance phases of the forward gait.
Hamstring muscle activation tremendously varies between even plane and treadmill during forward walking for both swing and stance phases (Table 3). The effect of variation is larger for swing phase (Cohen’s d = 1.810) and stance phase (Cohen’s d = 1.740).
One-way ANOVA and Cohen’s d test performed on average hamstring iEMG values and its standard deviation on even plane and treadmill for swing and stance phases of forward walking gait cycle
∗ Mean (SD); # muscle activity comparison between even and treadmill; ## muscle activity comparison between swing and stance phases.
Average iEMG and peak iEMG (minimum and maximum values) of the gastrocnemius muscle in percentage are plotted for swing and stance phases of forward walking respectively and represented in Figs 4(a) and 4(b), whereas Figs 4(c) and 4(d) represent iEMG values of the gastrocnemius in the reverse direction.
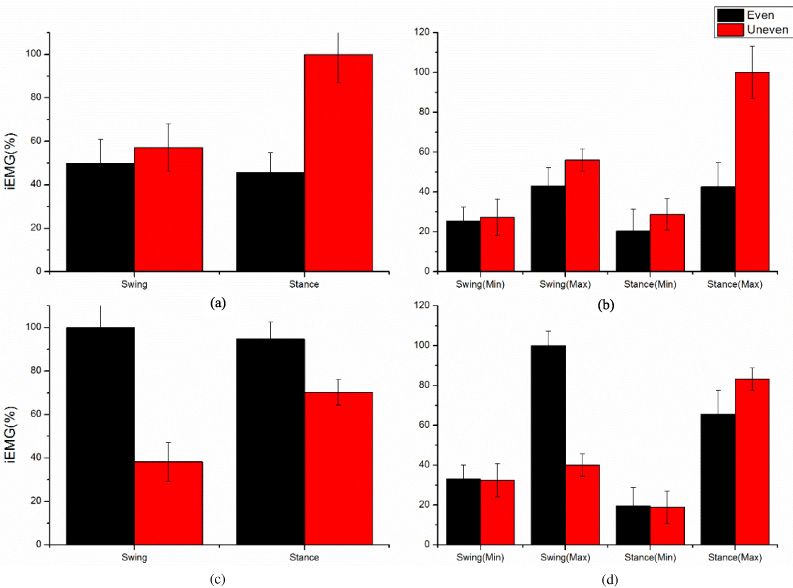
Gastrocnemius muscle iEMG during forward walking condition on even and uneven plane: (a) Average iEMG value, (b) Peak iEMG value. Gastrocnemius muscle iEMG during reverse walking condition on even and uneven plane: (c) Average iEMG value, (d) Peak iEMG value.
As natural reverse walking is difficult on treadmill, even and uneven planes are compared only for gastrocnemius muscles. iEMG of gastrocnemius muscle during swing and stance phases of forward and reverse walking on even and uneven planes are given in Table 4. In forward walking, mean and standard deviation of muscle activity over even and uneven surfaces during swing phase of gait cycle are comparable, whereas a substantial dissimilarity is observed in the case of stance phase (p = 0.001, Cohen’s d = 3.114). The percentage variation of uneven over even is 17% for swing phase and 55% for stance. Though muscle activity in swing phase of forward movement is insignificant, the effect size of muscle activity between even and uneven planes is large.
One-way ANOVA and Cohen’s d test performed on average gastrocnemius iEMG values and its standard deviation on even and uneven plane for swing and stance phases of forward and reverse walking gait cycles
∗ Mean (SD); # muscle activity comparison between even and uneven; ## muscle activity comparison between swing and stance phases.
Despite following the muscle behaviour of forward walking, the gastrocnemius muscle shows no significance (p = 0.502) between even and uneven surfaces in muscle activity for reverse walking. There is a decrease in variation percentage of average iEMG in uneven plane over even plane for both swing and stance phase is 62% and 24% respectively. Cohen’s d value shows that there is a large and medium-large effect in muscle activity during swing and stance phases of reverse walking.
During a gait cycle, the force transmitted to the leg due to heel strike is balanced internally by the forces developed in quadriceps femoris, hamstrings and gastrocnemius muscles [12]. Among the three major muscles that internally balance the force transmitted due to heel strike, muscle activity of quadriceps femoris muscle largely varies between even and uneven plane while walking over it [8]. Hence the variability in muscle activity between even and uneven planes while walking over it is larger 8. Variability is measured as the standard deviation of muscle activity on uneven plane to that on even plane. Rectus femoris and vastus lateralis of quadriceps femoris muscle have variability over 80%, whereas vastus medialis has variability over 45%. As the variability is much higher, the effect size is also bigger. As Alexandra S. et al. has setup the uneven platform for walking to measure the muscle activity on a treadmill, a combined effect of the muscle activity due to uneven and treadmill is obtained. Hence, a separate comparison of muscle activity between uneven plane and the treadmill is not required.
On a comparison of muscle activity and its variation among even, uneven and treadmill while walking in forward direction over it during swing and stance phases, a significant variation is observed in the hamstring muscle activation between the phases of gait cycle. However, combined effect of hamstring muscle actuation during walking on three platforms in the forward direction cannot be calculated due to the limitation in application of Cohen’s d test on more than two groups. Moreover, the higher Cohen’s d value (about three times higher) during swing phase than that of stance phase in reverse walking indicates highly intensified muscle activity variation between these phases. It is suspected that this threefold Cohen’s d value between these phases is due to occurrence of fatigue in the hamstring muscle [22].
A high variation in muscle activity is observed between walking in forward direction on even plane and treadmill during stance as well as swing phases of gait cycle. The reason for the variation in muscle activity is that, hamstring muscle activates at a higher rate when the person himself adjusts his gait cycle to adapt with speed of the treadmill. However, when comparing swing and stance phases for the significant variation in muscle activations, there is insignificant muscle activation between these phases. This is because muscle activities over both even and treadmill surfaces are included in each phase of the gait cycle.
In case of gastrocnemius muscle forward walking, irrespective of the significance in muscle activity, the Cohen’s d value of stance phase is more than three times that of the swing phase. Here the effect size depicts the intensity of the muscle effort on each plane during walking. The gastrocnemius muscle takes more effort during stance phase than in swing phase. Also, the muscle activity is significant for the complete gait cycle. While in reverse walking, Cohen’s d value for swing phase is less than two times of the stance phase. This shows the effort taken by gastrocnemius muscle for walking on even and uneven planes between stance and swing phases.
Conclusion
The significant variation in gastrocnemius and hamstring muscle activity during walking over treadmill, even and uneven plane describes a gait deviation between these planes. An in-depth study of gait deviation while walking on irregular surface has been conducted and the following observations are made from the results obtained:
The gait cycle deviation is significant during forward walking over even plane, uneven plane and treadmill. Gait deviation between even and uneven planes in reverse walking is insignificant during both swing and stance phases. Gastrocnemius muscle plays a major role than hamstring muscle in changing normal gait cycle while walking over uneven surface during forward walking. The hamstring muscle activity is the main reason for gait deviation between treadmill and even surface during forward walking.
Footnotes
Acknowledgements
The study was supported by the Design and Innovation Centre at the National Institute of Technology Calicut.