
Abstract
BACKGROUND:
Most stroke survivors are suffering from physical motor impairments and confronting with the risk of falls, and well trunk stability is essential for balance during daily functional activities.
OBJECTIVES:
Current fall prevention devices have various limits to the efficient recovery of balance function of the trunk. To provide hemiplegic patients after stroke with the retraining of trunk position sense and a safety environment, a novel fall prevention device is proposed.
METHODS:
Firstly, the structure of the device is introduced and this work is a first effort towards restoring trunk balance function through retraining of trunk position sense. Secondly, the kinematic and static model of the device are developed. Lastly, kinematic and static analysis are carried out to study the motion characteristics, and a contrast experiment was derived to show the effectiveness of robot.
RESULTS:
No obvious difference in balance ability between two groups prior treatment (
CONCLUSIONS:
The results show that the fall prevention device has good kinematic dexterity within the prescribed workspace and markedly improves balance function.
Introduction
Trunk stability requires appropriate muscle strength and neural control as well as sufficient position sense to provide a stable foundation for movement [1]. Most paralytics with movement disorder suffer from balanced dysfunction, which seriously affects the recovery of their walking ability [2]. And 5,000,000 people leave permanent disability by stroke every year [3], hidden danger of falls hinders stroke survivors from the advanced therapies, retraining of trunk position sense is a method for improving the balance and control of the trunk [4]. Although the six motion parameters determine the gait pattern rather than the trunk control, but the trunk control is important to balance, functional performance and fall prevention. Therefore, a fall prevention device with position and force feedback for the trunk has become necessary in balance function rehabilitation and trunk muscle strength training.
Three types of fall prevention device have been used for the safety protection in rehabilitation training: walking stick assistant devices, fall prevention safety harness and partial body weight support system. For example, the walking-aid robot developed by the Huazhong university of science and technology uses multi-sensor to recognize motion intention, which remains the center of gravity in the scope of protection [5]; Fall prevention safety harness is adopted by the CAREN rehabilitation system [6] and the KineAssist rehabilitation robot [7], which catch the patient when the tilted angle of trunk exceeds a certain value to reduce the risk of falls; Body weight support system is adopted by the Locomat rehabilitation robot [8] and the ReoAmbulator gait training robot, which almost completely limits the motion of trunk, without the risk of falls. Furthermore, the Solo-Step [9], SafeGait and RevoGait have been used for lower limbs rehabilitation training, which provide patients a safe environment and a boost of confidence [10].
However, some limitations of these designs are the following, walking stick assistant devices cannot ensure the safety of patients, fall prevention safety harness has little contribution to trunk position feedback and correction, body-weight support system limits the motion of trunk and pelvis.
In the following study, a novel fall prevention device concentrated on retraining of trunk position sense is developed, as shown in Fig. 1. The improvements over the previous solutions are the following. 1) The device actualizes three degrees of freedom (DOFs) of the trunk, trunk flexion-extension, lateroflexion and rotation; 2) Based on the kinematics and statics of the device, the safety motion space of the trunk is obtained; 3) Establishing the relation between the position and force feedback of trunk, stroke survivors can recognize the trunk position and enhance the balance ability through retraining of trunk position sense and the perturbation-based balance training respectively [11, 12]. The device changes the flexion-extension, lateroflexion and rotation of pelvis, two of them are the determinant grades for gait pattern.
In this paper, we integrate fall prevention device with the retraining of trunk position sense to effectively improve the quality of trunk balance rehabilitation. The analysis of kinematics and statics can be used to obtain the safety workspace and the feedback forces acting on patient. These results can then be used to analyze the movement trajectory and static perturbation.
Motion range of the trunk
Motion range of the trunk
The mechanism of the fall prevention device on the rehabilitation robot.
System description and kinematic modeling
As a fall prevention device, it is particularly important for assuring the security, comfortableness and effectiveness of the rehabilitation training [13]. The motion rules of trunk can be simplified as three rotations around
The CAD model of the mechanism is shown in Fig. 2. There are three main components of the mechanism: Fixed base: It is the fixed part of the mechanism and bolts to the pelvis support mechanism [15]. Joint 1 realizes the initial adjustment of lateroflexion and the rotation around
There are two sets of springs to provide the static perturbation: Compressed springs: They are installed on either side of the joint 1. The length of one spring decreases when the
In order to verify the rotation angle relation of each joint during movements, and obtain the corresponding relation between the position transformation of trunk and static perturbations acting on the patient, thus providing basis for the optimization design of the fall prevention device and determination of the spring parameters, the kinematics and statics modeling of the fall prevention device are required. In this paper, the analytical method is used for the computation of kinematics, the results are used for static analysis.
The model of the fall prevention device.
The diagram and coordinates systems of the fall prevention device.
Figure 3 shows the general configuration of the fall prevention device, where the base reference coordinates
Forward kinematics is to express the trunk orientation
Inverse kinematics is to solve angles of each joint
Assuming the magnitude of
Using the equation of Euler on Eq. (5) and separating real and imaginary
The approximated motion rules of trunk in a gait cycle.
parts:
Solving Eq. (6), and define:
Then, we can obtain the joint angle of the four-bar mechanism:
When the motion rules of trunk are given as shown in Fig. 4, we can obtain the change rules of joint angles
Change rules of each joint in a gait cycle.
There are two purposes for the statics modeling: calculating the constraining force in kinematic pair of the mechanism, determining the spring coefficient of compressed spring and elastic rope; solving the corresponding relation between the position transformation of trunk and static perturbations acting on the patient. Under normal circumstances, the kinematic acceleration is small enough, accordingly, statics analysis is representative.
Statics model of the four-bar mechanism.
In order to study the force
As seen in Fig. 6, with forces and moments, the system reaches static equilibrium, i.e.,
Where
In order to study the force
Statics model of the fall prevention device.
the lateroflexion movement, we establish the equilibrium equation of the fall prevention device by applying Newton second law, the joints 2, 3, 4 and 5 are supposed to be fixed, as shown in Fig. 7. The compressed springs generate
Where
The actual field test was carried out in a rehabilitation hospital located in Jiaxing, China, Jul. 2016
Regular physical training was conducted in both groups, the control group adopted conventional rehabilitation method, 4 times per week and 30 minutes every time, 8 weeks in total. The robot group was provided exercise training with the device, 4 times per week and 30 minutes every time, 8 weeks in total. The Fugl-Meyer assessment was employed to check the results.
Curves of three angles in a walk cycle.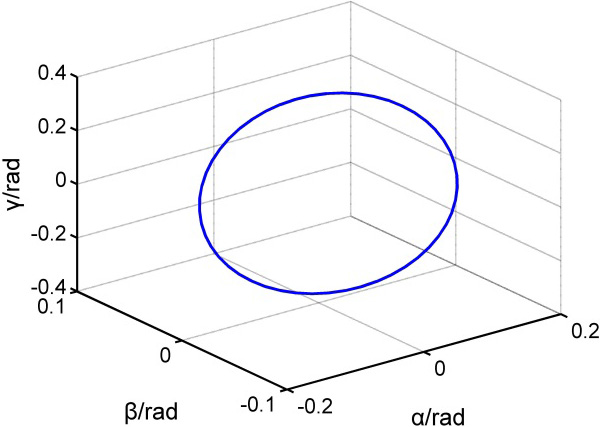
MALAB is adopted to program the subprogram of kinematics and statics analysis for fall prevention device respectively. When the patient is instructed to gait training, bringing movement parameters of trunk into the corresponding subprogram, then we can obtain the acquired joint space and the force field in workspace. The contrast experiment in the Jiaxing rehabilitation hospital, balance training with the robot vs. traditional rehabilitation training was carried out to test the effectiveness of the device. All experimental data was processed with SPSS 22.0, and expressed in mean
Simulation analysis
Assuming the motion rules of patient is the rules shown in Fig. 4, when the joint angles
Motion range of the end effector
Motion range of the end effector
In order to choose the appropriate elastic coefficient of the elastic ropes, thus providing patient appropriate feedback force in motion space. According to kinematics and statics model, we present the simulation for the force conditions in workspace. According to Eqs (2.1) and (14), by varying the elastic coefficient of the elastic ropes from 0 to 2000 N/m, and the motion rule of flexion-extension movement is
where
Statics solution illustration in a gait cycle.
Reset force illustration in a gait cycle.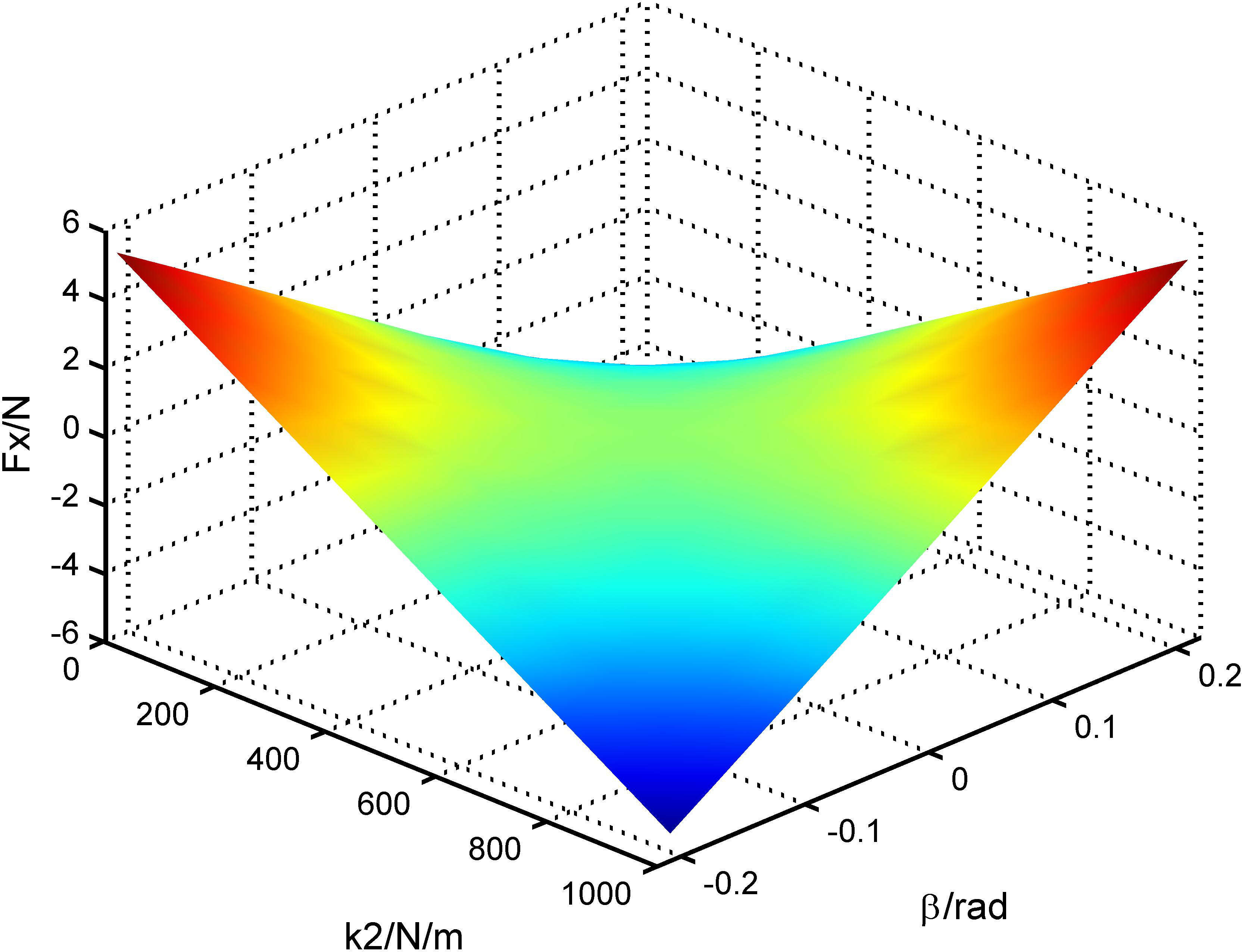
Relationship among 
Figure 9 shows that the designed mechanism works as expected when
Patient data
According to Eqs (2) and (17), by varying the elastic coefficient of the elastic ropes from 0 to 1000 N/m, and the motion rule of lateroflexion movement is
where
Determining the elastic coefficients of springs,
Comparison of Fugl-Meyer assessment of two groups (
Compared with the control group before treatment:
The patient data is given in Table 3. Table 4 and Fig. 12 show the results of the field test. Boxplot was employed to show the dispersion of our dataset. Nattier blue bar showed the data of robot group and mazarine showed another group. There is no obvious difference in balance ability between two groups prior treatment (
Comparison of Fugl-Meyer assessment before and after treatment.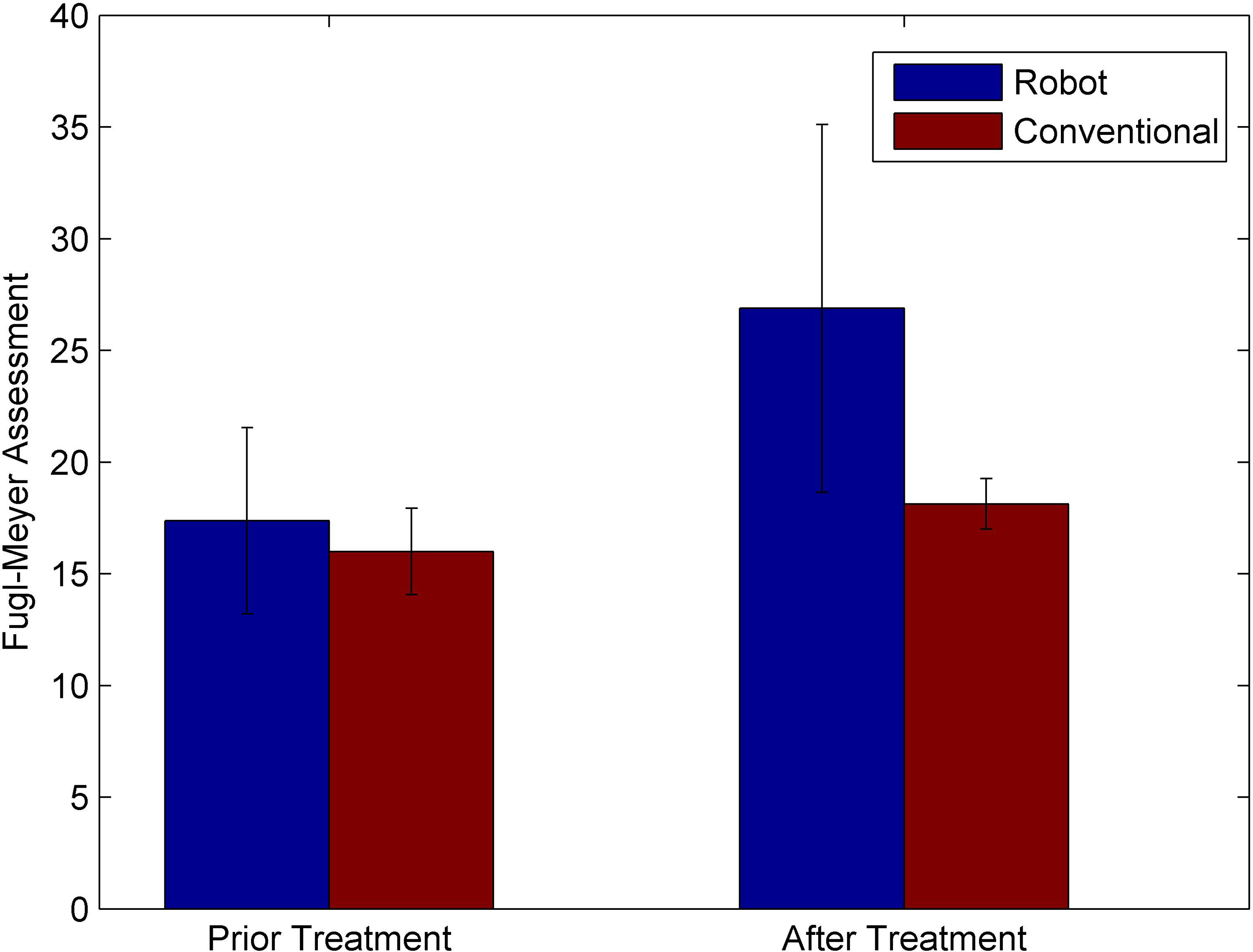
By comparing Table 2 with Table 1, motion range of the end effector is greater than that of the trunk. In addition, the three rotation centers are basically in coincidence with the motion center of the trunk. Therefore, the fall prevention device meets the requirements of trunk’s motions, providing the premise for the implementation of rehabilitative strategy.
According to Fig. 11, in any pose the patient exposures to the reset force pointed to the initial equilibrium position. And
Balance function is an important ability to automatically adjust and maintain the posture in movement or exposing oneself to perturbed force. The trunk plays an important role in posture balance. Retraining of trunk position sense is a method for improving the balance and control of the trunk. The proposed device provides patients an intervention in balance training and a secure environment, the experimental results showed the robot can markedly improve balance function of the subjects, comparing with the control group. Granacher et al. discussed the relationships between trunk muscle strength and balance performance in older adults [11], the device can provide subjects with force field to reinforce the trunk muscle strength. As a next step of this research, dynamic balance and trunk muscle activation will be measured.
Conclusion
To solve the existing problems of the fall prevention devices, a novel fall prevention device based on retraining of trunk position sense has been studied, which can be applied to carry out the trunk strength training, position sense training and fall prevention. Kinematic analysis and simulations of the fall prevention device showed that the mechanism can satisfy the needs of the rehabilitative training of the trunk. Static analysis and simulations of the mechanism showed that the mechanism can provide appropriate feedback force to assist the patients in the judgment of motion correctness and protect patient from falls. All results indicate that the fall prevention device has finely kinematic character and is suitable for the retraining of trunk position sense. The contrast experiment shows the effectiveness of trunk’s balance training.
In the future, we plan to extend the balance training in the force-field to study the relation between learning and field strength.
Footnotes
Acknowledgments
This work was supported by the National Natural Science Foundation of China (Grant No. 61573234) and the Shanghai Municipal Science and Technology Commission (Grant No. 17511107800).
Conflict of interest
None.