
Abstract
This study investigates the effect of superstructure configuration on the optimum design of slab on Precast I (PCI) girder bridges. For this purpose, more than 20,000 bridge cases of varying superstructure configurations are considered to investigate the effects of various superstructure parameters such as girder spacing, span length, slab thickness and girder types on the optimum design of slab on PCI girder bridges. PCI girders are designed conforming to the AASHTO LRFD for flexure using stress limits at the service limit state, then checked at ultimate for flexure and shear using factored loads at the strength limit state. A modified harmony search optimization algorithm is used to obtain optimum bridge design parameters using standard AASHTO PCI girders according to these AASHTO LRFD requirements. Those girders are designed taking into consideration geometrical constraints, stress constraints and constraints related to the conformity of the design with the AASHTO LRFD code. Various sensitivity analysis are performed to investigate the effect of different geometrical factors on the design of the girders, and easy-to-use design aids were developed. The outcomes of this study may facilitate the bridge engineers to choose optimum design parameters such as girder types and spacing as well as number strands for a certain span length before the design of slab on PCI girder bridges.
Introduction
Precast I (PCI) girders have been widely used in the design of bridge due to many advantages such as facilitating to pass larger spans than reinforced concrete girders, reducing construction cost with less maintenance in comparison with steel bridges. Standard AASHTO I-girder sections were developed for this purpose in the 1950’s as six types having various depths [1]. These sections have been widely adopted and the precast concrete industry is able to supply them in many areas.
The design of prestressed concrete members involves balancing the effects of loads and prestressing to eliminate or minimize tension in concrete member. Prestressed concrete beams are designed by AASHTO LRFD for flexure using stress limits at the service limit, which results in the number of strands to be calculated for this limit states then checked at ultimate for flexure and shear using factored loads at the strength limit state. Therefore, the estimation of optimum number of prestressing strands to eliminate or minimize tensile stress in concrete is the main purpose during the design of these type of girders [2, 3].
Optimum design of structures that satisfies all performance requirements while minimizing the overall cost and advanced optimization techniques enable to achieve this for any structure. Accordingly, many studies have been conducted for optimum design of bridge structures in the last decades. Several studies are conducted to evaluate feasible alternative girder sections to current girder sections [4–8]. The previous studies have been mainly concentrated to test the efficiency of the optimization methods which are used in their studies. Ahsan et al. [9] achieved 35% savings in cost per square meter of the deck area by using an optimization algorithm called evolutionary operation (EVOP). Rana et al. [10] achieved 36% saving in cost by application of same optimization algorithm to a two-span continuous post tensioned PCI girder structure. Aydin and Ayvaz [11] presented a study on minimizing the cost of a pretensioned PCI-girder bridge by using a genetic algorithm (GA) and proves that % 12.6 more economical solution is possible than the application project. Kaveh et al. [12] used the colliding bodies optimization to examine the effect of constant parameters on the optimum design of post tensioned box girder bridges with different span lengths and deck widths, and with various unit costs of concrete. Sirca and Adeli [13] presented a method for total cost optimization of prestressed concrete I-beam bridge systems, by considering the costs of the prestressed concrete, deck concrete, prestressed I-beam steel, deck reinforcing steel and formwork.
The purpose of this study is to minimize the overall cost of slab on prestressed concrete I girder bridges by using a modified harmony search algorithm. This study mainly deals with finding optimum AASHTO PCI girder type and spacing as well as number of strands for any span length for the preliminary design of bridge superstructure with PCI girders. Those girders are designed taking into consideration geometrical constraints, stress constraints and constraints related to the conformity of the design with the AASHTO LRFD code. Various sensitivity analysis is performed to investigate the effect of different geometrical factors on the design of the girders, and easy-to-use design aids were developed. The outcomes of this study may be beneficial for design engineers in the selection of most optimum AASHTO girder type and their spacing as well as number of strands for a certain span length of bridge.
Research outline and scope
To obtain optimum AASHTO PCI girder type and spacing as well as number of strands for any span length of slab-on-prestressed concrete bridges, a modified harmony search optimization algorithm is used to minimize cost subjected to a total of 16 constraints. The results obtained from this algorithm are then used to develop design charts to obtain most optimum girder types and spacing as well as number of strands to eliminate or minimize tension in concrete member and to achieve the service and strength limit states criteria specified in AASHTO LRFD Bridge design specification. The design charts are developed for all AASHTO PCI girder types I-VI. Such an approach will facilitate the selection of most optimum superstructure properties of such bridges before starting the design of bridges by engineers more effectively.
The research study is limited to symmetrical single span slab-on PCI girder conventional bridges with no skew and the bridges are assumed to have at least four AASHTO types I–VI PCI girders, as such girders are commonly used in bridge construction all over the world. Typical cross sections of these girders are presented in Fig. 1. The dimensions of cross section is tabulated in Table 1. The height (h) and moment of inertia (I) of the girders range between h = 711 mm and I = 0.0095 m4 for Type I girder and h = 1829 mm and I = 0.305 m4 for Type VI girder as shown in Table 2. The scope of this research study is limited to short and medium length bridges with lengths between 10 m to 70 m. The bridge widths vary from 8 m to 20 m. Girder spacing are arranged by the program to fit the spacing to corresponding bridge width. Then, the number of girders is selected automatically according to this. The slab thicknesses of bridges are assumed to be changed from 175 that is the minimum slab thickness according to AASHTO LRFD, to 300 mm.
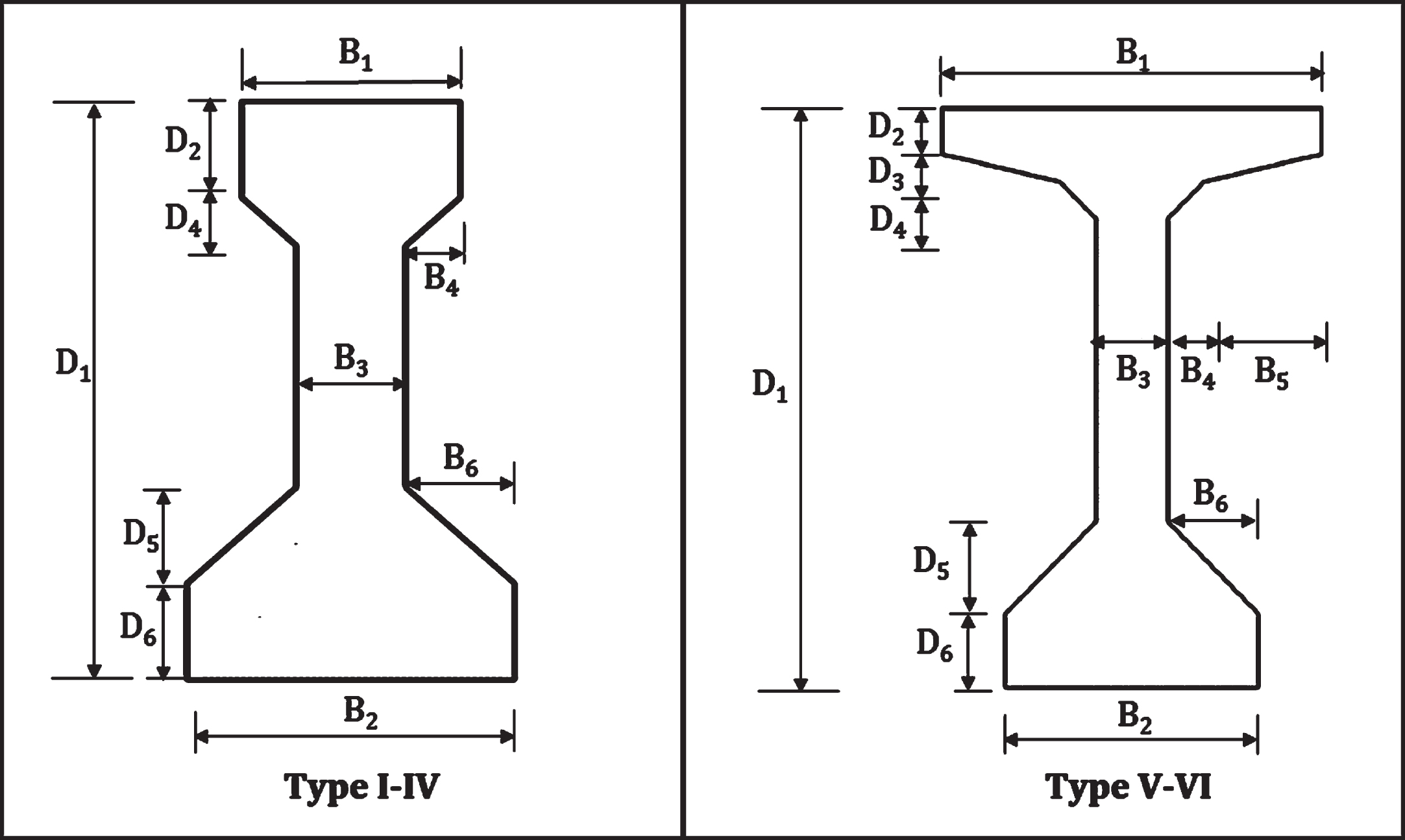
AASHTO and Caltrans PCI girders.
AASHTO I girder dimensions (mm)
Geometric properties of AASHTO I Girders
The design optimization of PCI girders conforming to the AASHTO LRFD code requirements is a nonlinear multi-parametric design optimization problem subjected to a multitude of constraints. Thus, the typical design approach undertaken by structural engineers is to select a proper AASHTO girder type and assumes a girder spacing in a simplified manner, without taking into consideration all the interconnected influences of various parameters that are part of the design process, such as, but not limited to: deck thickness, overhang, number of prestressing strands, length of bridge, type of section, material characteristics and cost.
Thus, to tackle those influences, more than 20,000 bridge cases of varying configurations are considered. Metaheuristic algorithms are considered able to tackle such challenges especially when a larger amount of design configurations is considered.
To achieve the objective of this study, a modified harmony search optimization algorithm is used to obtain optimum bridge designs using standard AASHTO PCI subjected to various input configurations and conforming to the AASHTO LRFD requirements.
To proceed, the design problem must be formulated as a minimization problem, first. The objective is to find a solution
Where n is the number of girders, C g is the cost of the girder, I d is an importance factor for the cost of the deck and C d is the cost of the deck. The cost variables C g and C d can be calculated by summing up the cost of concrete, strands and reinforcement in the girders and deck slab.
Since the design must conform with the requirements of the AASHTO LRFD code, the optimization algorithm has to take those requirements into consideration. This is done by formulating “constraints” that are not allowed to be violated. To keep the optimization problem as an unconstrained one, constraints have to be dealt with. In this research, constraints are dealt with using the “penalty method”, in which a modified penalized objective function is defined by modifying the objective function presented in Equation (1) to become:
Where φ (x) the penalized objective function F (x) is the unconstrained objective function, c i is the i th constraint α, β, γ are penalty parameters taken to be 1.0, 2.0 and 2.0, respectively.
Constraints used for bridge superstructure optimization
A total number of 16 constraints, shown in Table 3 are considered in this study. Some of those constraints provide an upper limit, which should not be exceeded, while others provide a lower limit. The calculation of the constraint violation factor c i for upper and lower limit constraints is shown as follows:
To perform the optimization, the solution vector has to be defined to represent the variables of the design optimization problem. The definition of such solution vector x is:
Where t is the type of the AASHTO Girder, S1 is the total overhang, n g is the number of girders and n s is the number of strands. Furthermore, a graphical representation of the solution vector is shown in Fig. 2.
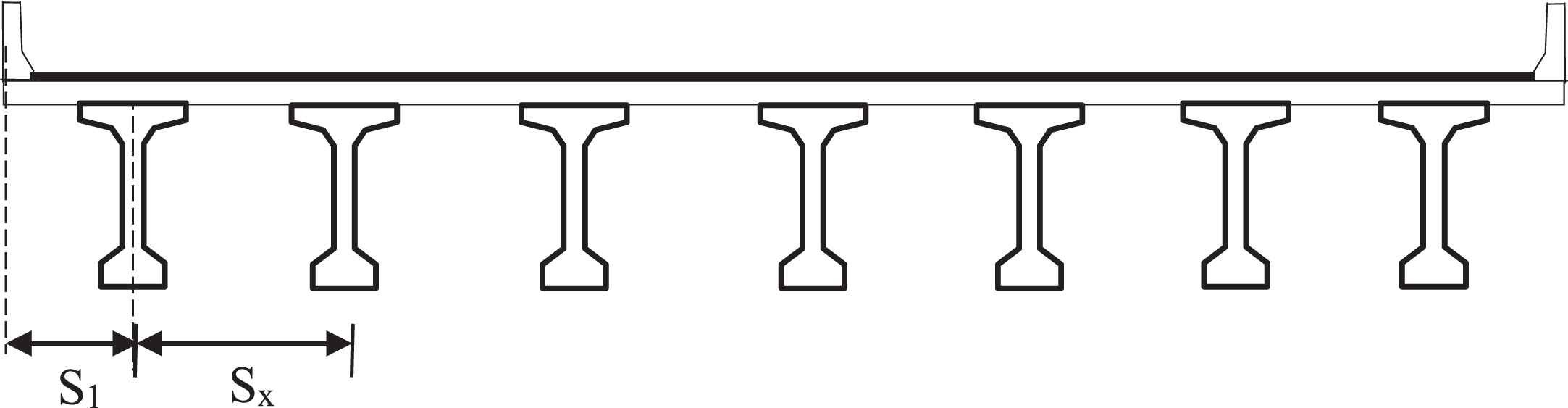
Typical bridge section.
Developed by Geem et al. [14], Harmony search (HS) is inspired by the attempts of a musician to compose the best possible harmony. HS established itself quickly amongst its metaheuristic optimization counterparts, even outcompeting some of the best known algorithms such as Genetic Algorithms (GA)s as reported by Yang [15]. Further research presented in [16, 17] show the superiority of the performance of HS when compared with other algorithms. Furthermore, one of the advantages of HS is its relatively easy algorithmic structural, which makes it a suitable platform for improvements. Furthermore, its gradient free nature enables it to tackle complex engineering problems successfully, as relying on gradients for complex problems would lead to local minima, due to the multi-modality of such optimization problems [18–21].
As the case for other metaheuristic algorithms, HS follows the typical pattern of initialization, iterative search, updating and termination.
Initialization
The algorithm’s memory, called the Harmony Memory (HM), is randomly initialized with solutions that are selected randomly from the problem’s search space. The number of solutions in the HM is controlled by Harmony Memory Size (HMS). Subsequently, the objective function is evaluated.
A new solution x new is assumed using an element by element approach. For each element xi ∈ xnew, the value is calculated:
{
The HM is updated based on a greedy selection scheme. The objective function Φ new = Φ (x new ) of the new solution is evaluated. The new solution replaces the worst solution in HM if it is better.
Termination
Once the maximum number of iterations is reached, the run terminates and the algorithm reports back the best solution found.
The Modified Adaptive Harmony Search Algorithm (MARSHAL)
MARSHAL eliminates one of the weaknesses of HS by introducing self-adjustment to its HMCR and PAR control parameters, as different parameters are required for different stages of the iterative search. It is well-known that the requirements at the beginning of an optimization run is different than at later stages. At the beginning, the focus is on “exploration” to avoid the convergence to local minima, whereas at a later stage, the focus shifts on the “exploitation” to improve on the solutions that are currently available in the algorithms storage, which is the Harmony Memory in the case of the Harmony Search Algorithm.
MARSHAL adopts the “adaptive” scheme presented in the Adaptive Harmony Search (AHS) as reported by Hasancebi et al. [22] with HMCR and PAR values being adaptively selected each iteration.
Furthermore, as the iterations pass, the quality of the solutions in HM improves. Thus, it is beneficial to start limiting the search space for values around those solutions. It should be noted that that such search space reduction should be handled carefully to avoid pre-mature convergence.
Thus, a modified version of the HS algorithm, namely the MARSHAL, presented in [19, 23], is used in this research. The modified algorithm utilizes an adaptive scheme for the control parameters HMCR and PAR, which was presented originally in Hasancebi et al. [22]. The value of those control parameters are calculated on a iteration by iteration basis as follows:
MARSHAL was successfully used in complex problem such as damage detection [24], Identification of stiffnesses of experimental structures [19], Damage Detection in scaled wind turbines [25] and the suggestion of non AASHTO PCI girders in [8].
To finalize, the process of the MARSHAL is shown in Fig. 3.
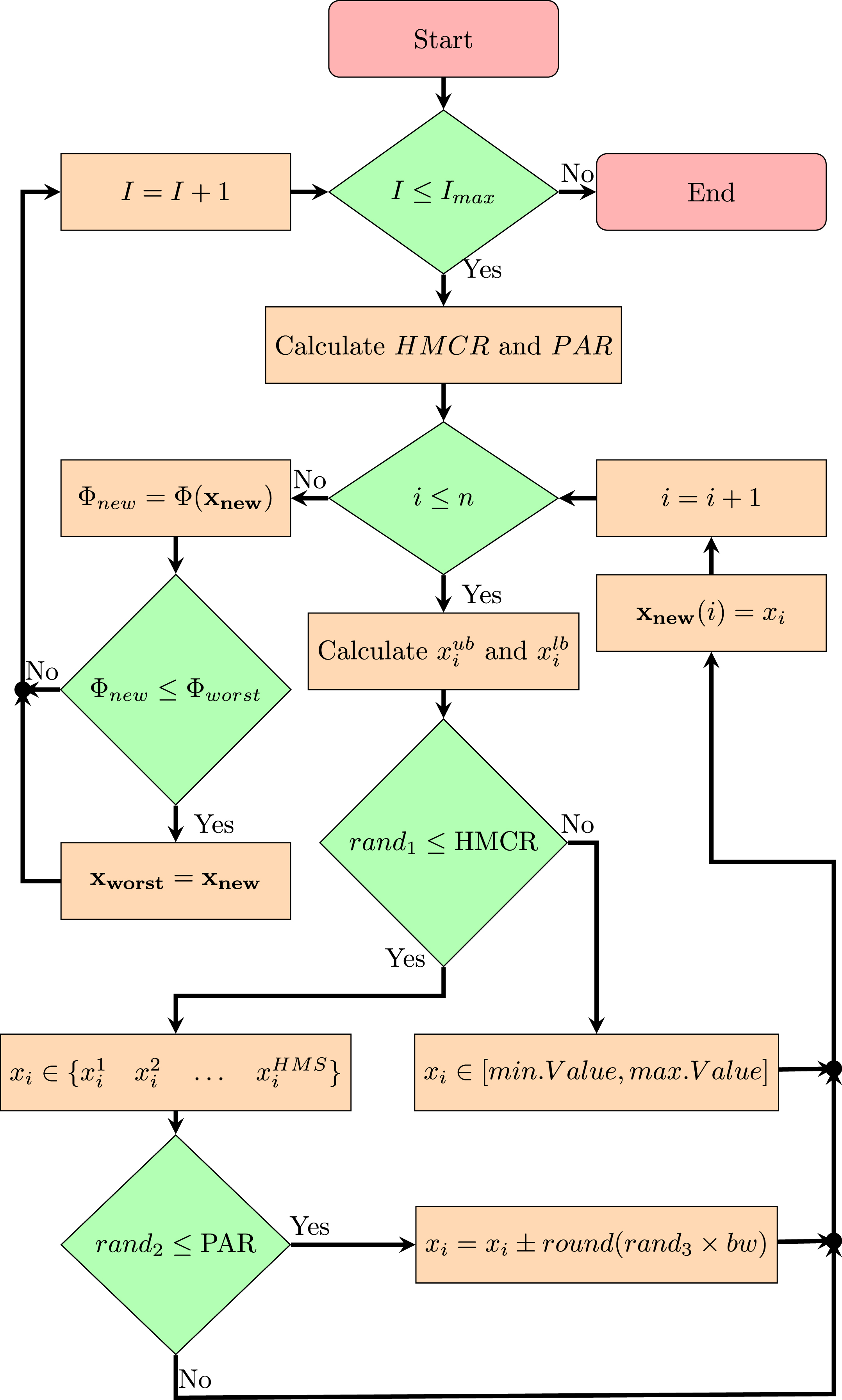
MARSHAL’s flowchart [8].
A comprehensive study of a large number of bridge variations is performed and optimized using MARSHAL. In total, over 20,000 cases where optimized. The variation of the considered bridge parameters is shown in Table 4.
Variation of bridge configurations considered
Variation of bridge configurations considered
The optimization run using MARSHAL was performed using the following parameters:
Max. number of iterations I max = 5,000
Learning Rate γ= 0.35
Harmony Memory Size HMS = 30
Search space reduction after 30% of iterations.
Number of runs per configuration = 3.
The convergence of MARSHAL, shown in Fig. 4, follows the typical convergence profile of meta-heuristic optimization algorithms with a steep fast convergence in the beginning, transitioning into a shallow slope near the end.
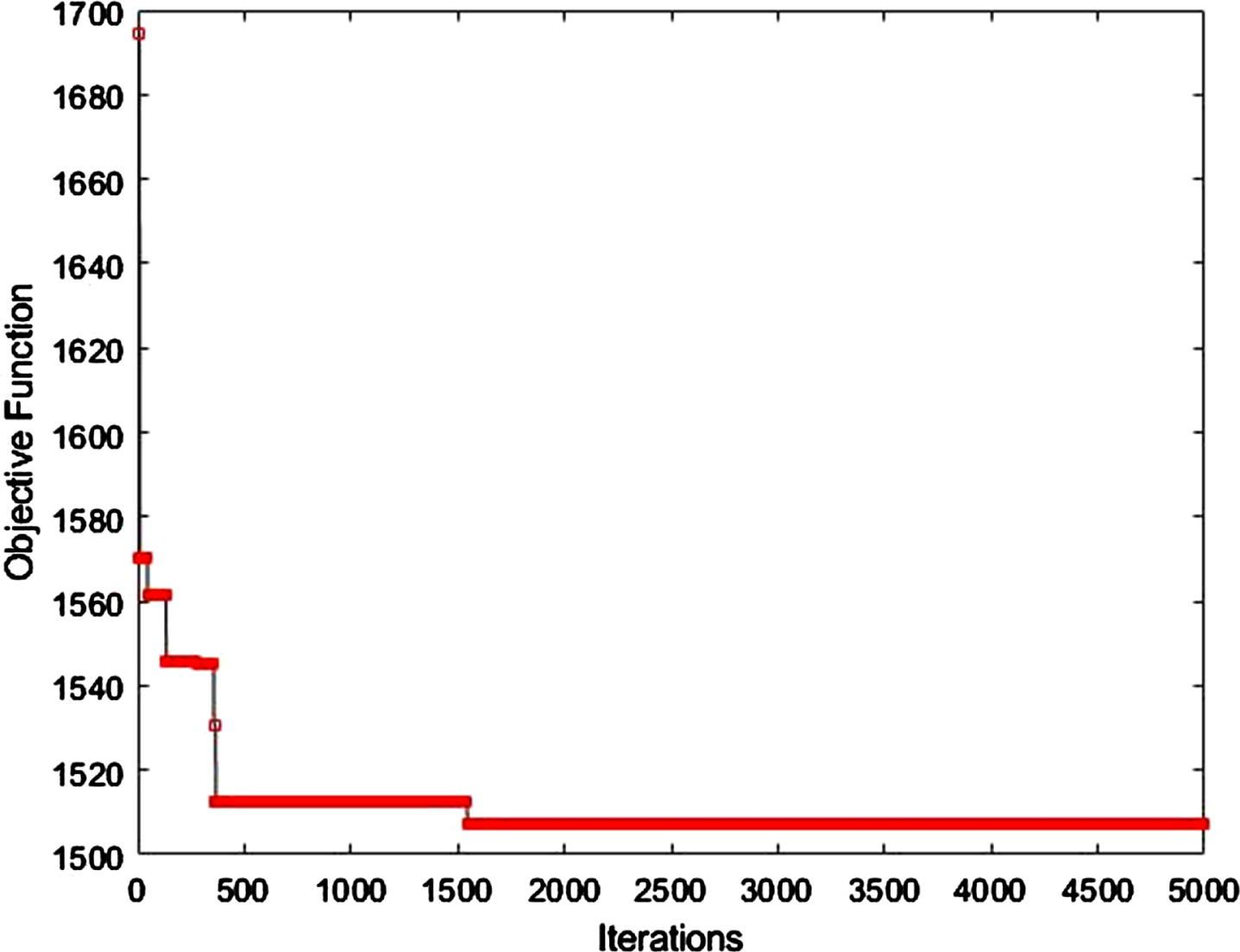
Convergence of typical optimization run.
The variation of both control parameters (HMCR) and (PAR) is shown in Figs. 5 and 6, respectively. As the solutions within the Harmony Memory improve, the chance is higher to obtain better solutions relying on the solutions stored in the harmony memory. Thus, higher HMCR and PAR.
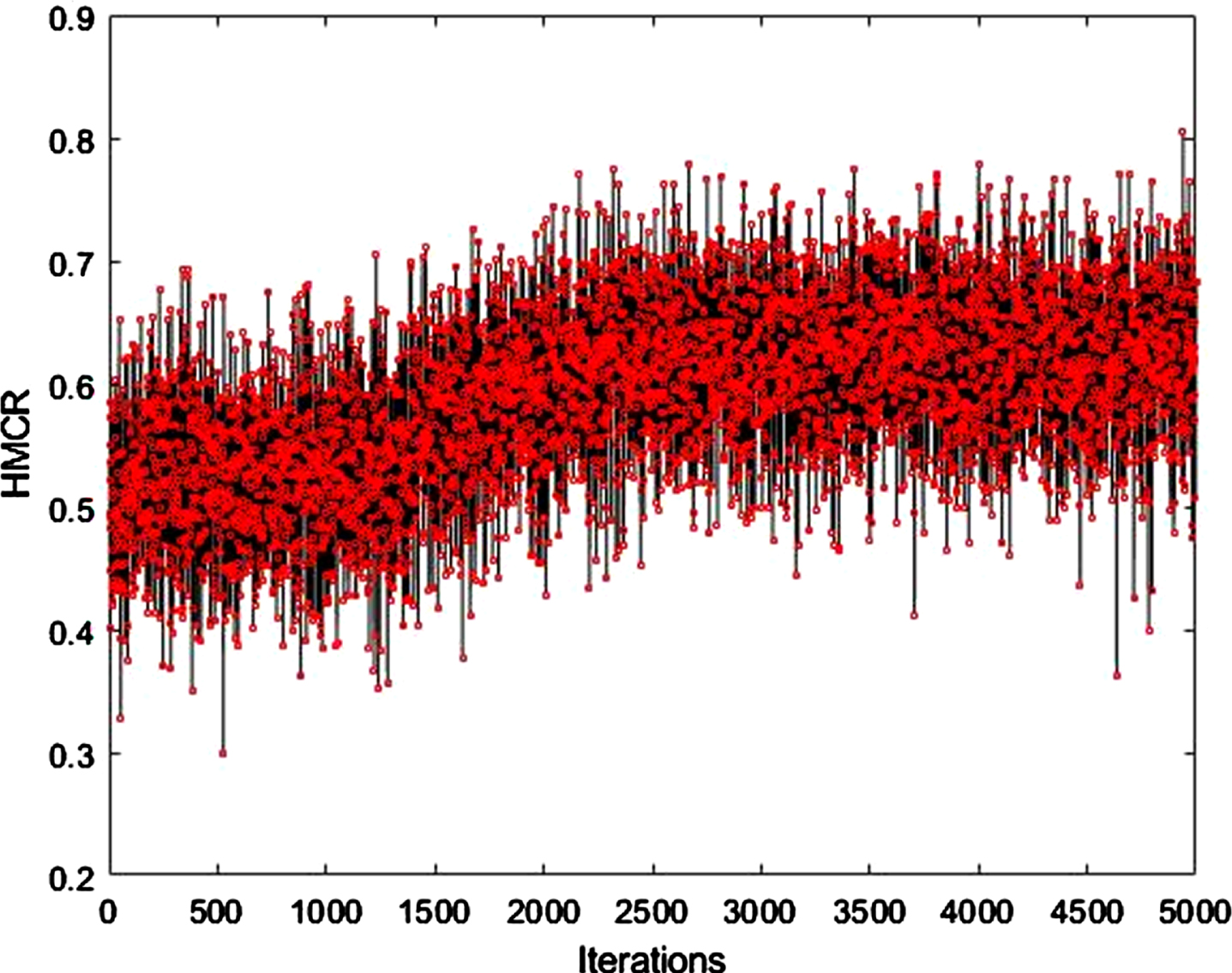
Typical variation of HMCR within a run.
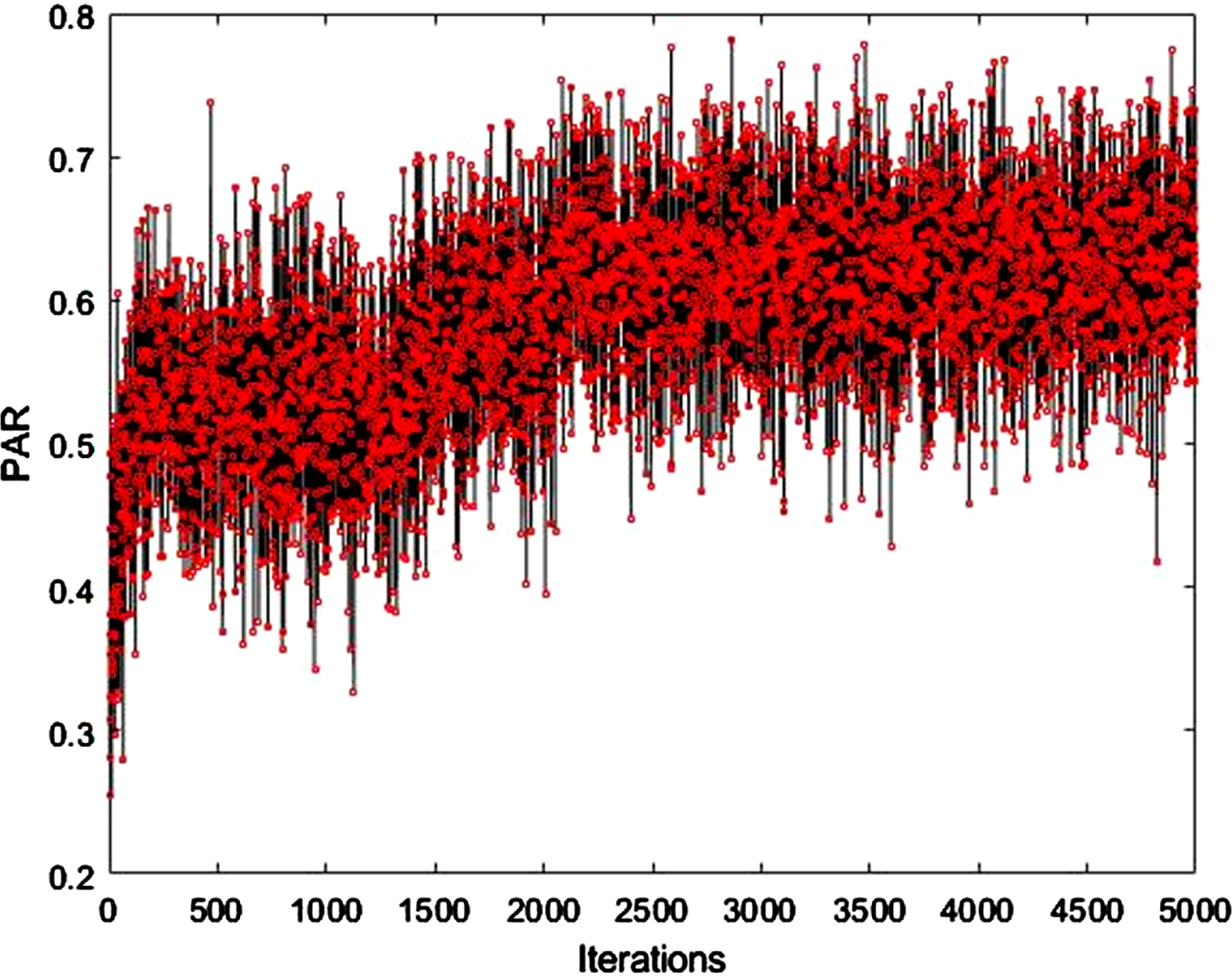
Typical variation of PAR within a run.
The parametric study leads to useful and practical outcomes for design engineers to choose proper superstructure parameters such as girder types and girder spacings as well as the number strands to use in the prestressed girders. In the following sections the findings of this study are discussed.
As mentioned earlier, AASHTO PCI girders are produced having six different heights to cover a broad range of bridge span found in practice as most economical way. However, there is no practical way to select proper girder type for a known span length. This is generally done by using engineering experiences, which is an iterative scheme leading, sometimes, to overestimations of the design. Accordingly, the most optimum girder types for specific span lengths are deduced from the analysis results and summarized in Fig. 7. In the Figure, all girder types are shown for most optimum span lengths to use in practice. These outcomes will facilitate to bridge engineer to choose most optimum AASHTO girder type for a given span length at the preliminary design stage. As mentioned earlier, the span lengths of bridges are assumed to be varying from 10 meter to 70 meter. However, as observed from Fig. 7, currently available AASHTO PCI girders are efficient until 45 meter span length. After this span length, the cost is increasing dramatically. Girder type I is found to be economical only 10 m span lengths. Girder type II enables most optimum design for the bridges having span lengths varied from 11 to 23 m. Girder type III is most cost efficient for span lengths from 24 to 30 m. Girder type IV provides most optimum solution for span lengths varied from 31 m to 35 m. Girder Type V is found to provide most economical solution for bridges having 36 m to 37 m. The bridge having a span length over than 37 m should be designed by using girder type VI and for the bridges over than 45 m, the AAHTO I girders are found to be ineffective in terms of cost for bridge design. Other alternative girder types should be used for bridges over than 45 m.
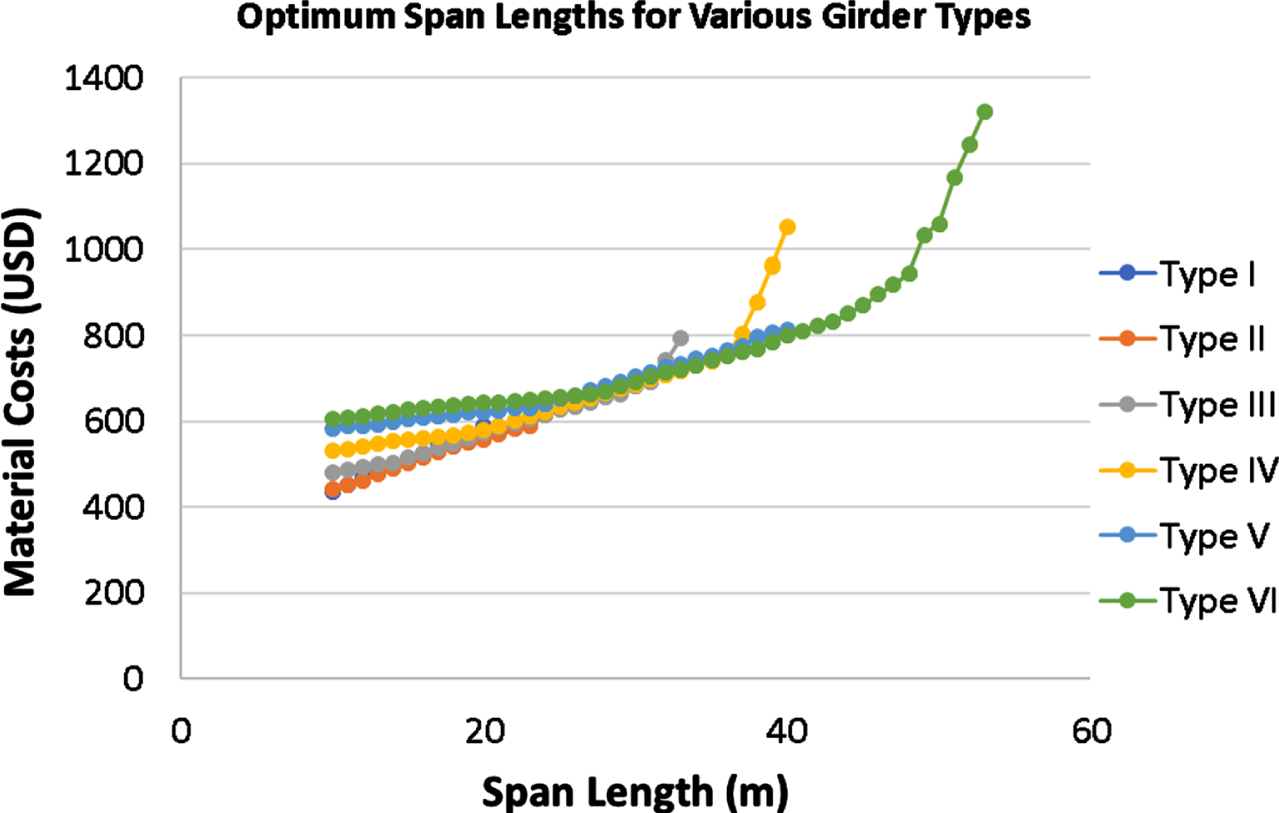
Optimum girder type for various span lengths.
The girder type is not only the parameter to affect the optimum design of slab on PCI girder bridges. The girder spacings and number of strands are also other significant parameters. Therefore, most optimum girder spacings and number of strands are also deduced from the outcomes of this study and summarized in the Fig. 8. As mentioned earlier, AASHTO Type I is cost efficient for 10 m span length and varying girder spacings 1.57 m to 1.8 m. Number of strands for each girder spacings are shown inFig. 8 (a).
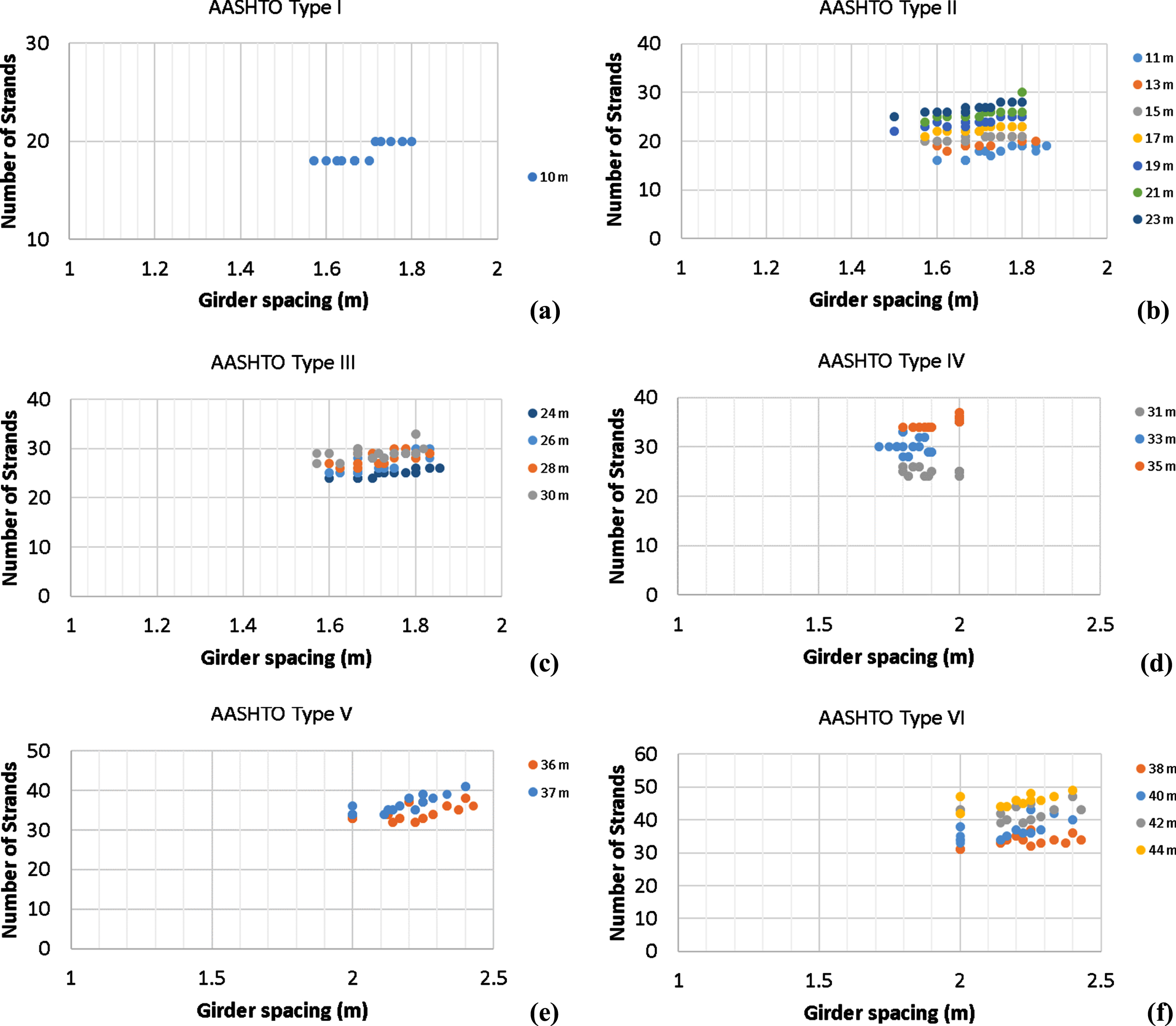
Most cost-efficient number of strands vs girder spacing for various girder types and span lengths.
The parametric study reveals that AASHTO Type II girder enables optimum solutions for wide range of span lengths (from 11 m and 23 m). The suggested girder spacings for this type of girder varies from 1.5 m to 1.89 m for various span lengths and number of strands. The most cost-efficient number of strands as a function of girder spacings for various span lengths are summarized in Fig. 8 (b).
Figure 8 (c) displays that the cost-efficient girder spacings and number of strands when AASHTO Type III girder is used for span lengths from 24 m to 30 m. As observed from Figure, the most cost-efficient girder spacings for this type of girder varies from 1.57 m to 1.86 m for various span lengths and number of strands. Corresponding number of strands for each cost-efficient girder spacing are illustrated in Fig. 8(c).
Figure 8(d) shows that deduced results from parametric study for AASHTO Type IV girders for span lengths of 31 m, 33 m and 35 m. The most optimum girder spacing for this type of girder changes from 1.71 m to 2.24 m for various span lengths and number of strands. The number of strands for each girder spacing are presented in Fig. 8(d) as a function of various girder spacing for considered span lengths.
This study reveals that AASHTO Type V girder is efficient for limited span lengths (36 m and 37 m). The efficient girder spacings are found to be changed from 2 m to 2.43 m for these span lengths for different number strands as seen in Fig. 8(e).
AASHTO Type VI provides most optimum design facility when the span length is 36 m or over. The most efficient girder spacings are varied from 2 m to 2.43 m for various span lengths and number of strands. The least number of strands for these girder spacings to satisfy the design criteria are displayed in Fig. 8(f) as a function of various girder spacing and various span lengths.
The results presented in Fig. 8 can be further summarized and compared to the recommendations found in the “PCI Bridge Design Manual”, as shown in Table 5.
Results summary and comparison
It can be noted that the design via MARSHAL’s optimization algorithm is able to extend the range of possible spans by around 116% on average, with largest increase of 161% for Type II girders, and smallest increase of 75% for Type III girders. Possible spans are not always the most cost-efficient, and it was found that Type I and V are most optimum in limited span lengths. Type I was the most cost efficient alternative for 10 m only, whereas Type V was found to be most cost efficient in spans around 36 and 37 m.
The recommended number of strands in relation to span length for each AASHTO girder type is further shown in Fig. 9.
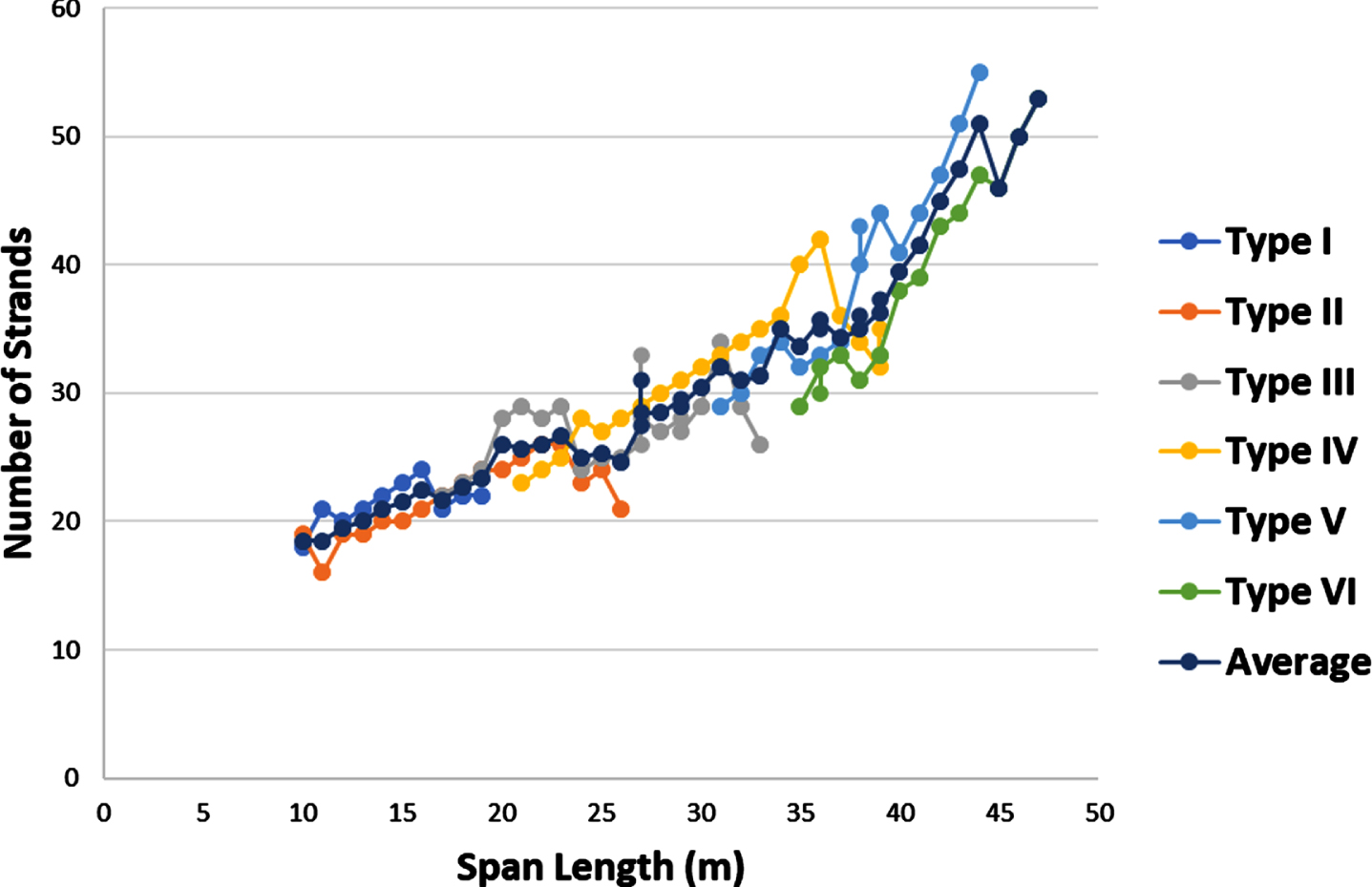
Number of strands for various AASHTO types and spans.
To help designers with a preliminary estimate, the best fitted curve for the strand average along with its coefficient of determination is shown in Equation 13.
where n s is the number of strands and L is the span length in meters.
A parametric study is conducted to obtain most cost-efficient superstructure configuration for the design of slab on AASHTO PCI girder bridges. For this purpose, a harmony search algorithm developed. Then more than 20,000 bridge cases of varying superstructure configurations are considered to investigate the effects of various superstructure parameters such as girder spacing, span length, girder types and number of strands on the optimum design of slab on PCI girder bridges. The followings are the conclusions deduced from this research study:
The AASHTO PCI girders are cost-efficient until 45 m. It is suggested to use other girder types for the span lengths exceeding 45 m.
This study revealed that AASHTO type I and V girders are cost-efficient in limited span lengths. AASHTO type I is found to be efficient for only 10 m span lengths and type V is only efficient for 36 and 37 m. The girder types II, III, V and VI are found to be cost-efficient for more varying span lengths.
Larger sizes of girder types provide more optimal results in the cases of relatively larger girder spacings (2 m or more). However, smaller sizes of girder may also provide cost-efficient solutions when the girder spacings are 1.5 m. The girder spacings less than 1.5 m are not found to be cost-efficient. Therefore, the girder spacing of these types of bridges should be chosen 1.5 m minimum to obtain more cost-efficient solutions.
The most optimal superstructure configuration such as girder type and spacing as well as number strands to satisfy service and strength limit states specified in AASHTO LRFD may be chosen from the finding of this study.