
Abstract
The paper present efficient Fault-tolerant Control approach using Interval Type-2 Takagi-Sugeno Fuzzy Controller (IT2TSFLC) with conventional Proportional Integral (PI) controller for MIMO hybrid nonlinear level process. The implementation of control algorithms for MIMO systems is challenging due to variations in dynamics because of changing in operating point and the characteristics of nonlinear dynamic interaction. Such difficulties often deteriorate the performance of industrial MIMO process. This work develops T-S modeling of MIMO hybrid level process thereafter designed FTC using combination of knowledge base IT2TSFLC controller and model base PI controller subject to actuator and system component faults. To verify the applicability of the proposed FTC, this work presents a Two Conical Tank Interacting Level System (TCTILS) to examine the control performance. Along with, simulation results of proposed scheme is compared with Type-1 Fuzzy Logic Controller (T1FLC) and PID controller. Simulation results show that the IT2TSFLC relies a good dynamic behaviour of the TCTILS, a perfect level tracking with no overshoot, lesser settling and rise time. Two different error indices Integral Absolute Error (IAE) and Integral Square Error (ISE) are used to validate the proposed FTC scheme among two other scheme.
Keywords
Introduction
In any industries accuracy, profitability, availability and human safety are critical parameters. To maintain these parameters efficient and accurate control algorithms are needed, since past three decades different control algorithms ware developed for various engineering applications presented in [1, 2, 3, 4, 5]. Fault-tolerant Control (FTC) is an advance control scheme, which repel the effects of the faults on the control performance and maintain control performance at acceptable level with overall system stability [6]. Hence from past two decades, the importance of FTC systems becomes increasingly apparent, and considerable amount of research has been done in this area [5, 7, 8, 9, 10, 11, 12, 13, 14]. To tolerate the fault effects on system performance two redundancy ware used, one is hardware and second on is analytical redundancy. The hardware redundancy is not practical solution for any engineering system due to high cost and complexity of the system [15]. To overcome this limitation an analytical (computational) redundancy is right selection. The advantage of the analytical redundancy method is that it makes possible to identify the occurrence of the fault and to deal with the unsafe situation using the information of the extent and class of the faults. To design point of view FTC scheme has classified in two types: Active Fault Tolerant Control (AFTC) and Passive Fault Tolerant Control (PFTC).
The AFTC method is based on the fact that the controller can reset its parameters or even change its structure, as well as implement rapid dynamic compensation control output to keep system stable after the fault occurs. To overcome this problem, the AFTC method must have the ability to actively acquire the information of the faults or system state changes. Currently, Fault Diagnosis and Isolation (FDI) approach is an important strategy for the design of AFTC. The AFTC is overly dependent on the FDI performance, and it may lead to failure of fault-tolerant control system, due to the mistake detection, omission, long delay or large diagnosis error caused by fault diagnosis mechanism [6, 13]. The PFTC method is based on robust control ideas. It attributes the fault to the model parameter perturbation issue, and compensates the fault by the kind of fixed gain controller with strong robustness to ensure the system is insensitive to certain faults [12]. It can be found that the PFTC method require designers to predict as many faults as possible before the controller design. According to the changing characteristics of the dynamic system model parameters in the fault states, a robust controller with fixed structure and gain are worked out, which it does not need to be adjusted on-line for the particular predicted fault modes. Its advantage is that the control law is fixed and easy to implement, and it can guarantee the system stability and achieve the preset performance whether or not a fault. However, the controller must calculate the parameters for the most serious fault condition that the system can take. It often lead to the control law too conservative, and with the increase of the system fault complexity, the controller design process will become more difficult. According to a variety and severity of different faults (i.e. abrupt and incipient fault nature) that may affect the system, different levels of performance have to be considered in different fault scenarios. In addition, to guarantee that the closed-loop system be able to track a reference trajectory even in the event of faults. In the case of performance degradation, actuator faults (loss of effectiveness) and sensor faults avoidance being required, design controller needs to adjust the output that maintain the acceptable control performance and system stability in the event of faults [21].
In recent years, because of its combination of continuous and discrete dynamics researchers are more and more attracted to develop an efficient control strategies for SISO multi-tank as well as MIMO multi-tank level system [1, 2, 12, 13]. To the best of our knowledge, few works have published on the topic of fuzzy logic based fault tolerant system for interacting and non-interacting level control process. However, there are still many open issues which have to be addressed.
Although traditional fuzzy theory can resolve a number of problems, its robustness can be improved. Some researchers have proposed interval type-2 T-S fuzzy theory to improve the robustness of the fuzzy control systems. Type-2 fuzzy sets and their related definitions have been provided in related literature [16, 17, 18, 19]. In [1, 2, 20] authors are investigate the Passive FTC responses for interacting and non-interacting level control system for actuator, sensor and system component faults using fuzzy logic control. In [21, 22, 23] authors proposed and simulate the FTC for highly nonlinear level control system (i.e. two-tank non-interacting conical tank system) subject to actuator and system component faults, and found significant results. But less research and development on FTC using Interval Type-2 fuzzy Control system has been done before. Due to the advantages of Interval Type-2 fuzzy system and TS fuzzy dynamic model, a FTC based on interval Type-2 TS fuzzy control is proposed in this paper. It can show a great potential in handling various modeling as well as control applications.
This paper proposes a FTC strategy to tolerate the actuator and system component faults for interacting level control system based on Interval Type-2 T-S Fuzzy logic control (IT2FLC). In the present work, the capabilities of PFTC to handle two faults and reference trajectory management are exploited to design a fault tolerant controller. The main contribution of this paper is to introduce a novel FTC strategy based on IT2FLC for interacting level control process subject to actuator and system component faults. The simulation results are shown. The paper is organized as follows. Design of FTC design using IT2FLC and PID controller are considered in Section 2. Problem description and mathematical model is detailed in Section 3. Section 4 is dedicated to the simulation results with different types of fault and magnitude, followed by conclusions in Section 5.
Type-2 FLS structure block diagram [22].
Background of the type-2 fuzzy logic control
The concept of type-II fuzzy sets was also proposed by [24] to overcome this limitation [24]. However, [25] has provided more insight by developing and presenting the first type-II fuzzy logic system (T2FLS) in [25]. T2FLCs are able to outperform their colleague T1FLC, since their fuzzy sets are characterized by membership functions (MFs) which themselves are fuzzy compared to fuzzy sets of T1FLS, containing MFs having crisp values. Type-II fuzzy sets consists of Foot-print of Uncertainty (FoU), it is a bounded region of the uncertainty in the primary membership grades of a type-II MF. It is the union of all primary membership grades. Which makes it generally more robust and well capable to remove high oscillations. The interval type-II fuzzy logic system (IT2FLS), currently the most extensively used for their minimal computational cost is a special case of type-II FLS [26]. Type-1 and type-2 fuzzy logic are mainly similar. The only essential difference between them which is the membership functions shape, besides the output process. Indeed, an interval type-2 fuzzy controller is consisting of: a fuzzifier, an inference engine, a rules base, a type reduction and a defuzzifier [4, 27, 28, 29, 30] the block diagram of the type-2 FLC is presented in Fig. 1.
Type-2 fuzzy logic control
Fuzzifier
The fuzzifier maps the crisp input vector
Rules
The general form of the
where:
In a fuzzy interval type-2 using the minimum or product
Where
Block diagram of proposed FTC scheme [22].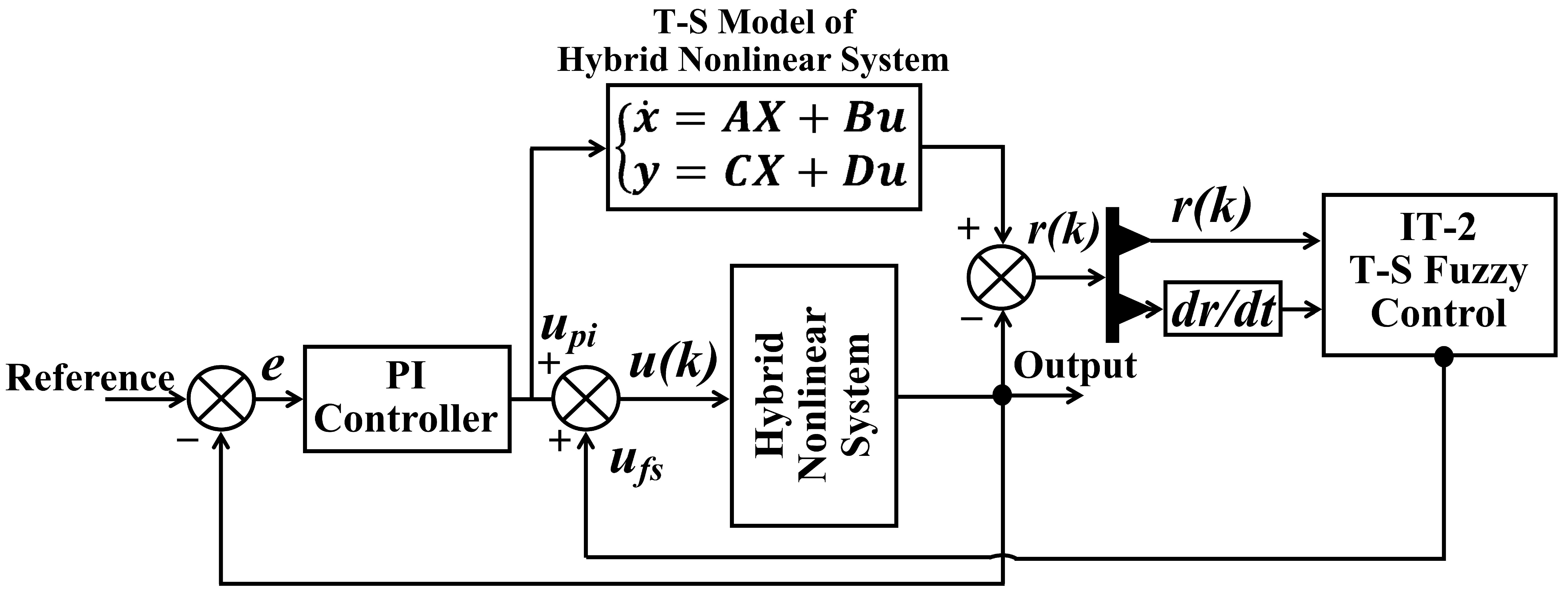
After definition of the rules and executing the inference, the type-2 fuzzy system resulting in type-1 fuzzy system is computed. In this part, the available methods to compute the centroid of type-2 fuzzy system using the extention principle are discussed [27]. The centroid of type-1 fuzzy system A is given by:
Where:
To get a crisp output from a type-1 fuzzy logic system, the type-reduced set must be deffuzzified. The most common method to do this is to find the centroid of the type-reduced set. If the type-reduced set
The output can be computed using the iterative Karnik Mendel Algorithm [4, 28, 29, 30, 31]. Therefore, the deffuzzified output of an interval type-2 FLC is:
with:
Model rule
Here
where
Membership functions of input variables 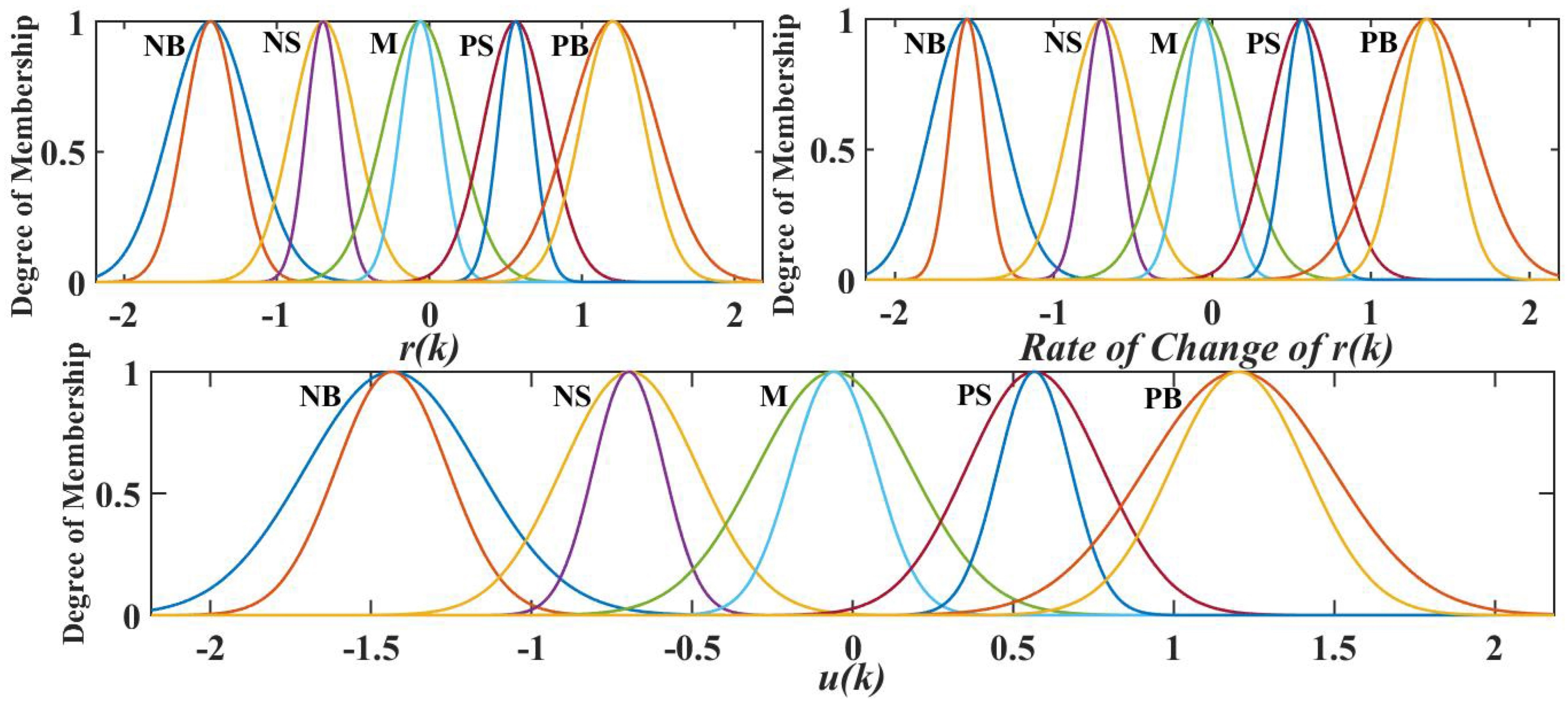
In order to eliminate the high oscillation, nonlinear system and model uncertainty, a continuous Interval Type-2 T-S Fuzzy Logic Control (IT2TSFLC) is used to approximate the discontinue control. The proposed control scheme is shown in Fig. 2; it contains conventional PI controller part and IT2TSFLC.
The equivalent control
where
All the membership functions of the fuzzy input variable are chosen to be gaussian for all upper and lower membership functions. The uses labels of the fuzzy variable residue and its derivative are: negative big (NB), negative small (NS), medium (M), Positive small (PS) and positive big (PB). Figure 3 presents the type-2 membership functions for the IT2FLC. The corrective control is decomposed into five levels, so total rules can be 25 presented in Table 1.
Fuzzy rules for IT2FLC
Two Conical Tank Interacting level System prototype.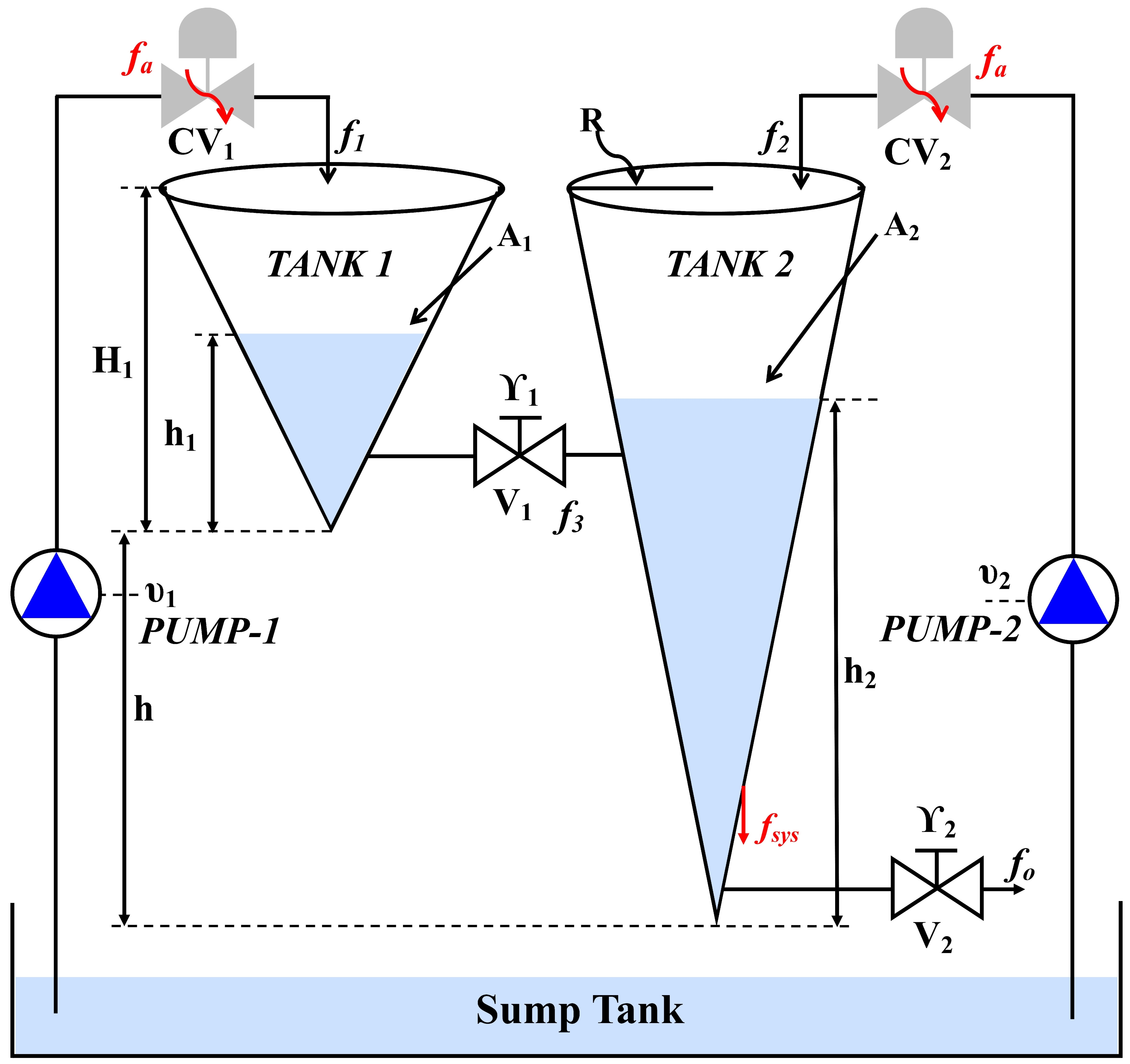
The plant used as the test-bench in this work is the Two Conical Tank Interacting Level System (TCTILS), which is shown in Fig. 4. The system contains two conical water tanks that can be filled with two independent pumps acting on the tanks 1 and 2. The liquid flow rate
Conical Tank Non-interacting level System prototype.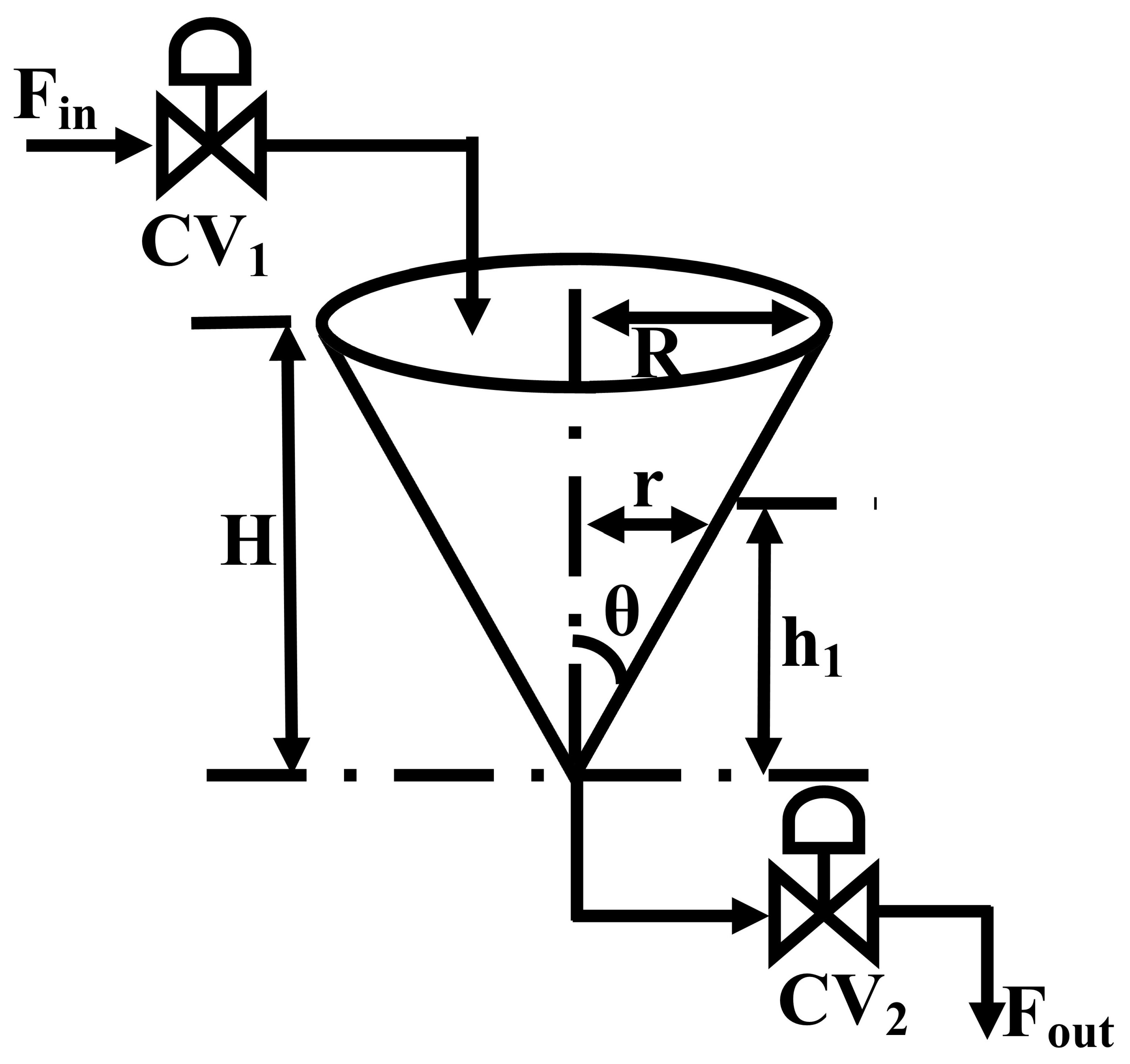
Regulatory responses for conditions (i and ii) (a) response with system component faults and (b) response with actuator faults.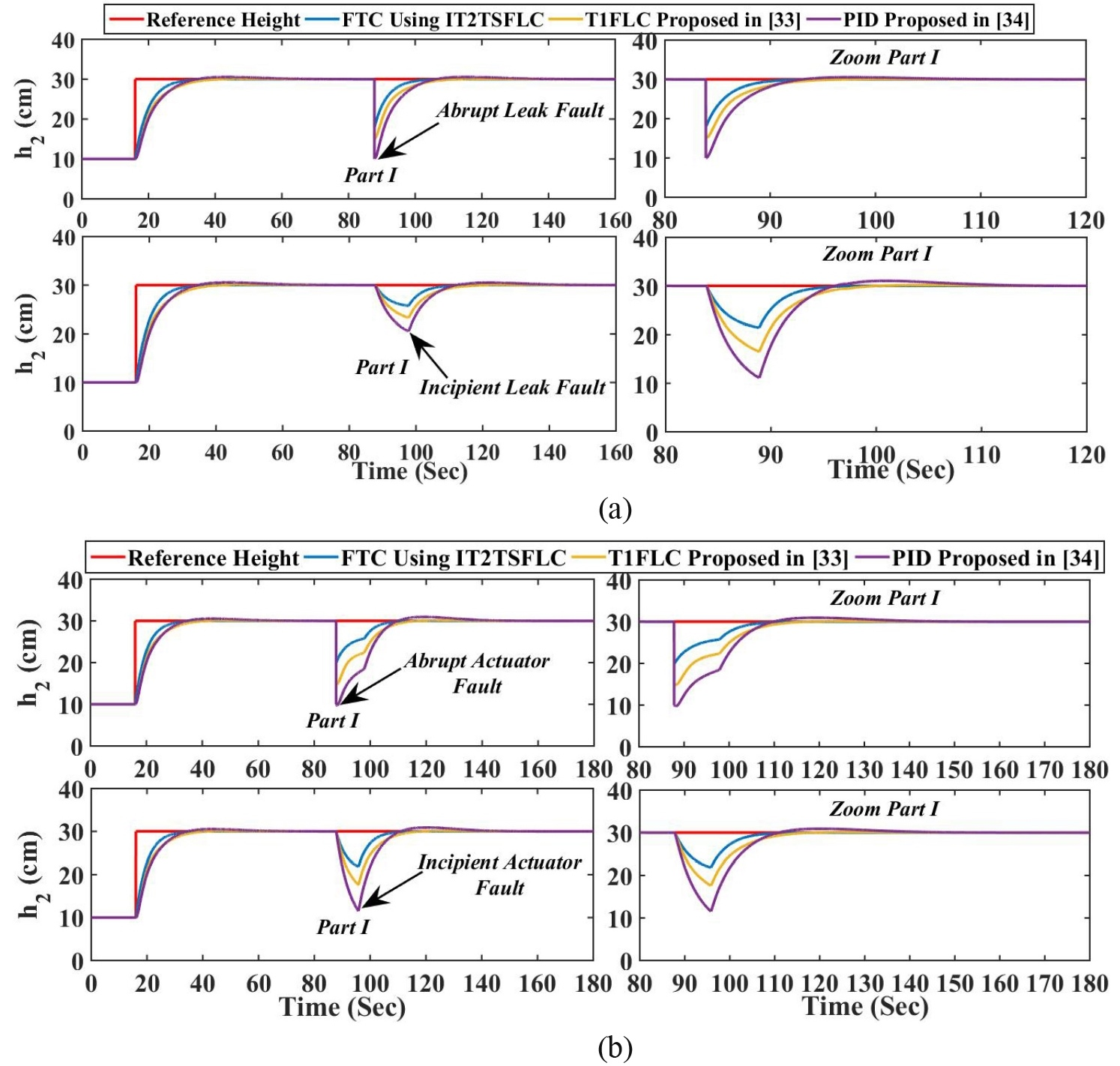
Interaction in the system is caused by interconnected pipes, which is connected between two conical tanks. The
The mathematical model is derived for both the conical tanks separately as follows.
From the Fig. 5
At any height
Two Conical Tank Interacting Level System parameters
For Tank 1 the mass balance equation is given by following relation [23],
Servo response for conditions (i and ii) (a) response with two abrupt leak faults and (b) zoom part response for Fig. 7a.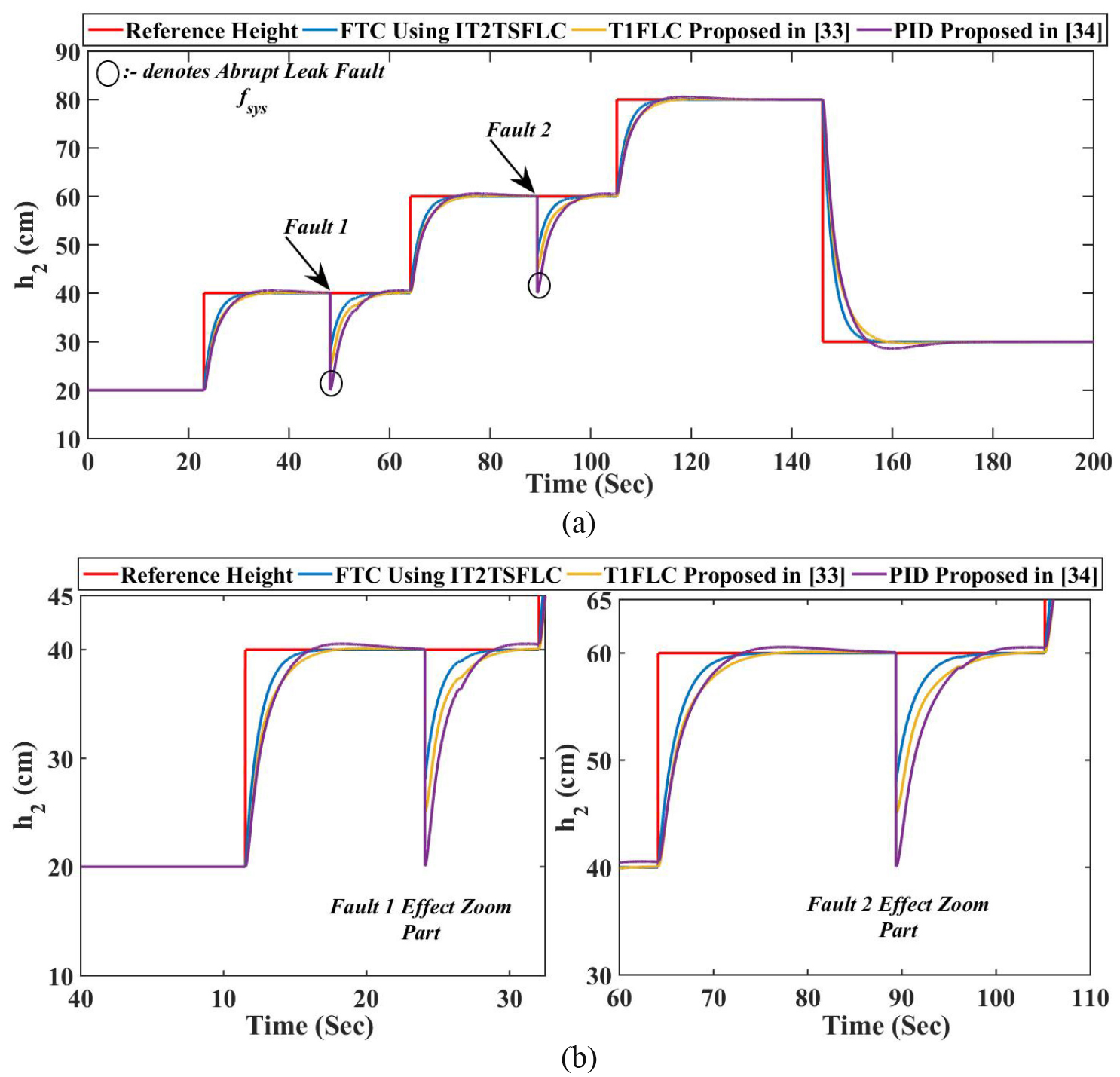
Area of the canonical Tank 1 at height
Similarly, for Tank 2 the mass balance equation is given by following relation [23],
Where, outlet flow of Tank 1 and Tank 2 given by
The range of the flow rate of pump-1 and pump-2 are about 0 to 253 cm
The output of the system considering
Servo response for conditions (i and ii) (a) response with two incipient leak faults and (b) zoom part response for Fig. 8a.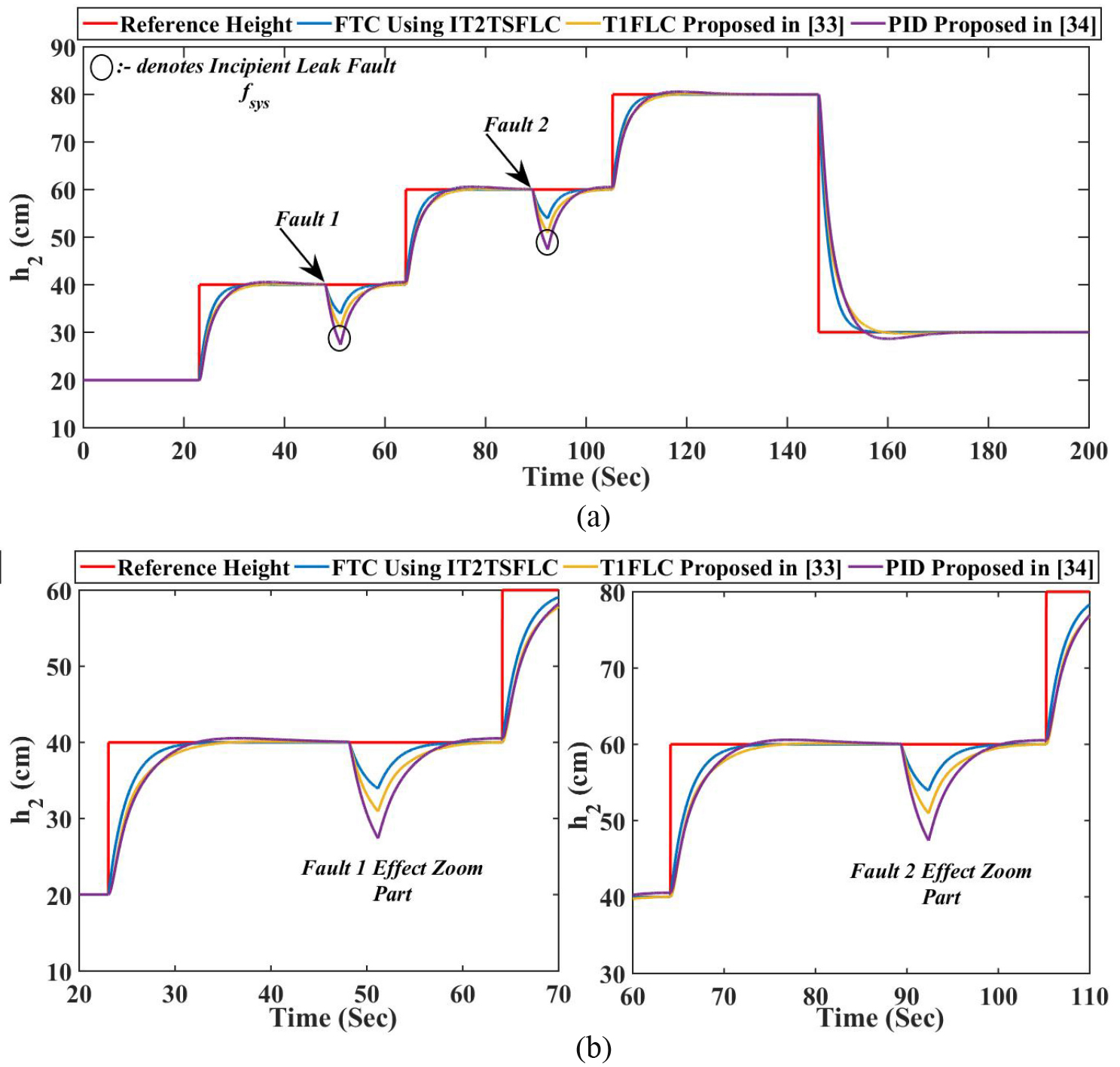
Servo response for conditions (i and ii) (a) response with two abrupt actuator faults and (b) zoom part response for Fig. 9a.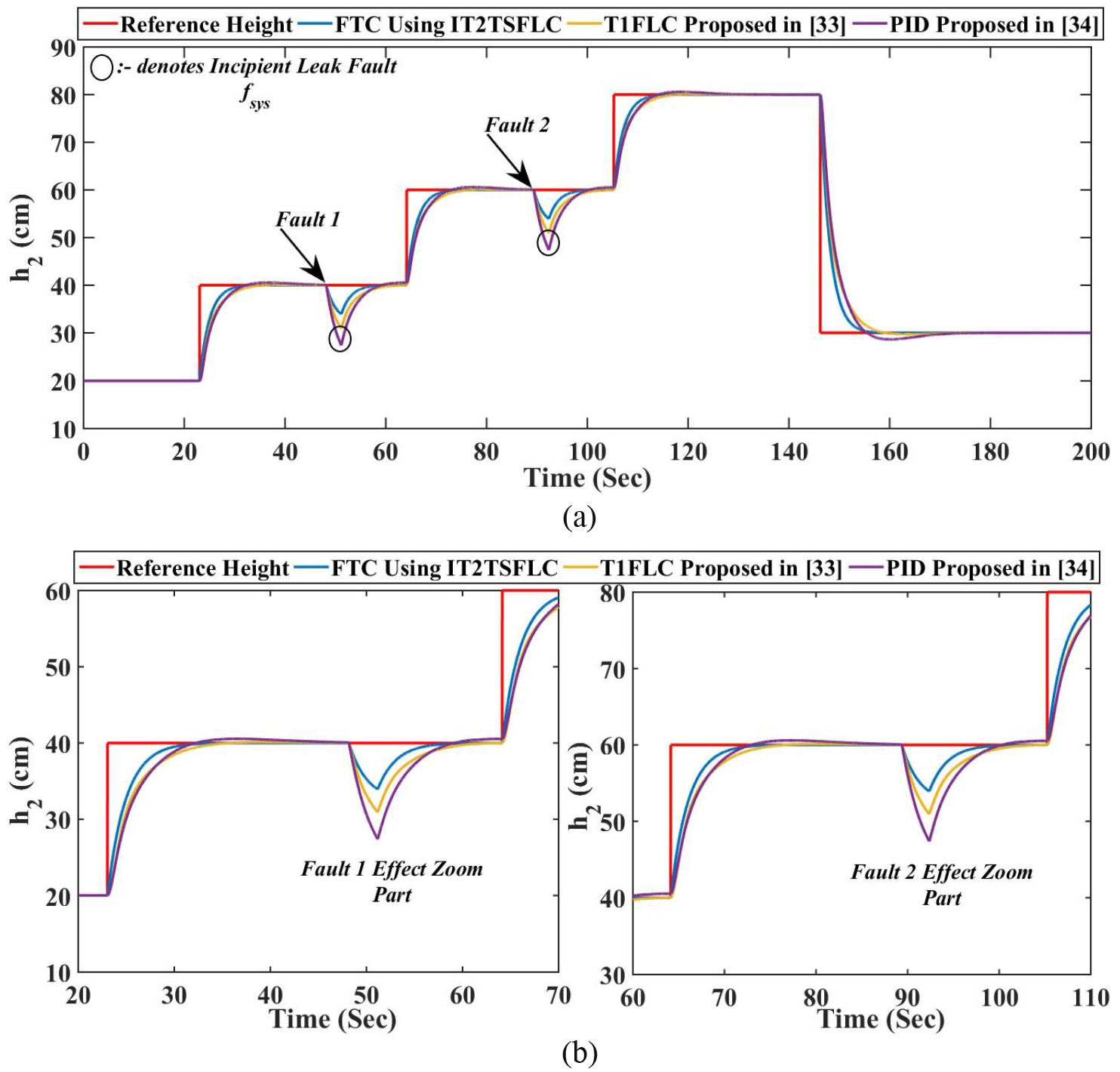
Servo response for conditions (i and ii) (a) response with two incipient actuator faults and (b) zoom part response for Fig. 10a.
This section presents the results from the simulation of FTC using interval type-2 T-S FLC, T1FLC and PID controller subject to actuator and system component (tank leak) faults and compared with T1FLC.
Transient response parameters comparison for IT2TSFLC, T1FLC and PID controller
Transient response parameters comparison for IT2TSFLC, T1FLC and PID controller
IAE and ISE error results from simulation for regulatory performance subject to system component (leak) faults
Mainly to assess the performance of FTC with servo and regulatory control, following conditions have been taken:
When interaction is in effect and system component (tank-2 bottom leak) (Abrupt and Incipient Nature) fault occur. When interaction is in effect and actuator (Abrupt and Incipient Nature) fault occur in
IAE and ISE error results from simulation for regulatory performance subject to actuator faults
IAE and ISE error results from simulation for servo performance subject to system component (leak) faults
IAE and ISE error results from simulation for servo performance subject to system component (leak) faults
In this literature, simulation is carried out for condition (i) and (ii) have been accommodated independently.
For the design and simulation of the control system MATLAB environment has been used, in order to validate the efficiency of the propped FTC. The volumetric inflow rate
Condition (i) and (ii) of investigation has accommodated together in Fig. 6a. To ensure the possible interaction level and system component faults
Figure 6b shows the simulation results for regulatory performance of TCTILS for condition-(i and ii). For condition-(i) 30 cm an height has been taken as a reference-point for tank-2, and for condition-(ii) Actuator faults (fa) taken in control valve
In this paper, efficient FTC scheme is proposed using an Interval Type-2 T-S FLC with PI controller for a Two Conical Tank Interacting Level System (TCTILS) subject to actuator and system component faults, the simulation results have been produced and efficacy of the proposed FTC investigated using IAE and ISE error. Also the proposed scheme is compared with conventional PI and T1FLC controller, transient parameters verifies the efficacy of the proposed scheme as compared to others. The key benefit of the IT2TSFLC appears to be its expertise to remove persistent fluctuations, model uncertainty and nonlinear behavior of the system. As the IT2TSFLC can tolerate larger faults and no need to measured accurate faults magnitudes. The prime benefits of the proposed strategy is to tolerate system component and actuator faults and maintain control performance at acceptable level.