
Abstract
Medical image techniques are used to examine and determine the well-being of the foetus during pregnancy. Digital image processing (DIP) is essential to extract valuable information embedded in most biomedical signals. Afterwords, intelligent segmentation methods, based on classifier algorithms, must be applied to identify structures and relevant features from previous data. The success of both is essential for helping doctors to identify adverse health conditions from the medical images. To obtain easy and reliable DIP methods for foetus images in real-time, at different gestational ages, aware pre-processing needs to be applied to the images. Thence, some data features are extracted that are meant to be used as input to the segmentation algorithms presented in this work. Due to the high dimension of the problems in question, assemblage of the data is also desired. The segmentation of the images is done by revisiting the
Introduction
Nowadays, images are very important to assist physicians in their decisions since these constitute a non-invasive way to diagnose and map the patient’s anatomy. Different types of images are magnetic resonance images (MRI), computational and digital tomographies and ultrasound images (UI). In obstetrics, having reliable exams is rather relevant since amongst 1000 women 3 have foetus malformations and, for this reason, primary detection and classification of brain abnormalities at widespread gestational ages are important.
MRI technology, patented in 1974 by Raymond Damadian [1], generates good images and is relatively safe. This type of image is relevant in neuroscience and obstetrics and has been used for the first time in pregnancy in 1983 [2, 3, 4, 5]. MRI are difficult to obtain and special care needs to be taken to make sure that their quality is enough for them to be reliably considered for analysis and diagnosis by specialists. It is factual that MRI of foetus may be corrupted by noise or blurred by the movement of the foetus during the examination [6]. However, there are methods of image reconstruction that have been developed to correct fetal movement and permitting to obtain 3D images of the fetal brain [7]. In particular, MRI of the human foetus is emerging as a clinical tool for early detection of brain abnormalities, due to its ability to evaluate morphometric measurements of a brain in development, and promises a range of new quantitative biomarkers to be used in the clinical evaluation of pregnancy [8]. A reliable tool that assesses MRI in real-time would be welcome, although this demands efficiency and speed in the evaluation. As reported in [7], the anatomy of the developing fetal brain is idiosyncratic in terms of both geometric and underlying tissue morphology, as it consists of a mixture of white matter, grey matter, and transitory structures related to brain growth.
As MRI scans are expensive, the reason for which they are used only in special cases, UI technology presents itself as a more economic alternative. Ultrasonography is used to create an image of internal soft body structures, as for instance the foetus in pregnant women or other internal organs, per ultrasound waves and is useful to find a source of a disease or to exclude pathology. Obstetrical sonography dates from 1958, with Ian Donald [9], and is commonly used during pregnancy to check on the development and presentation of the foetus, as it can be seen by the number of specialised journals in the subject, e.g. Ultrasound in Obstetrics and Gynaecology.1 UI remains the standard approach for assessment in obstetrics. It is widely available, cost-effective and allows for a real-time examination of the foetus. However, it may not bestow adequate assessment of a complex case or critical information for antenatal clinical management.
Unfortunately, UI often reveals poor detail of organs and tissues, partly due to the low-level contrast of images. These images are usually strongly degraded by a blurred, distorted shape and high dotted noise (speckle) which are due to the physical limitations of the process of the acquisition system – i.e., the sensor resolution, the limitations of sound waves behaviour and its non-ideal wave propagation conditions inside the body. MRI may overcome these limitations [10]. Presently, both scan methods are complementary in the field of medical diagnose as well as relevant in the clinical evaluation of pregnancy.
In biomedical engineering, the combination of MRI or UI with computational techniques warrants the development of high-interest tools for brain image analysis to assist neurologists and general practitioners in the early diagnosis. Thus, there is a need in the biomedical community to research new methods of processing and analysis, classification and pattern recognition that are robust, effective and general, i.e. applicable to different imaging technologies. In this work, new methods to pre-process the image are presented, followed by a modified
Digital image processing (DIP) refers to the manipulation of digital images through processing methods that are able to make them more clear. Image segmentation (IS) refers to the process of dividing a digital image into multiple regions (sets of points), to simplify its representation in order to facilitate the analysis [11]. As a result, a set of regions or contours is extracted from the image, where every point in the same region has similar characteristics, such as colour, intensity, texture, or continuity.
Foetus segmentation has been extensively studied over the years, with several methods having been described for this type of study. Medical images can easily identify the foetus using segmentation techniques and calculate fetal parameters [12]. The methods of segmentation applied to UI are reviewed in [13]. The advent of 3D ultrasonography has made possible the use of the fetal volume as a biometric measurement to monitor its development and the different required techniques [14]. In [15, 16], the construction of an atlas with 10 isotropic images is proposed as a first method. A second method is the construction of a simple atlas based on a segmentation that aims to find the transformation between the atlas and the target low-resolution images. Following a similar methodology, [17, 18] put labels on the atlas to specify different structures of the brain, since these are usually used as a paradigm for automatic segmentation algorithms. Automatic brain tissue segmentation of MRI using convolutional neural networks is described in [19], since manual segmentation is cumbersome and time-consuming. A review on automatic segmentation of the same kind of images is presented in [17].
In this paper, the fetal brain is segmented through neighbouring characteristics using the
In this work, image pre-processing is described in Section 2. In Section 3, a data aggregation procedure is explained, the reference data is discussed and the standard
Image pre-processing
The operations used on digital images – at the lowest level of abstraction – whose aim is to improve the representation by suppressing undesired distortions or enhancing some of its properties, relevant for further processing, are designated image pre-processing [26]. Specifically, it is performed in order to remove noise or highlight features such as contours or textures [6], uses redundancy in images and does not increase image information content. Standard processing algorithms used with advantage in many other application domains, such as hard edge or contour detection, frequently fail when applied to the UI processing task [27, 28]. In this section, we pre-process the images of Fig. 1 to prepare for the application of both versions of the
Selected images used in Experiment-1 and Experiment-2, respectively.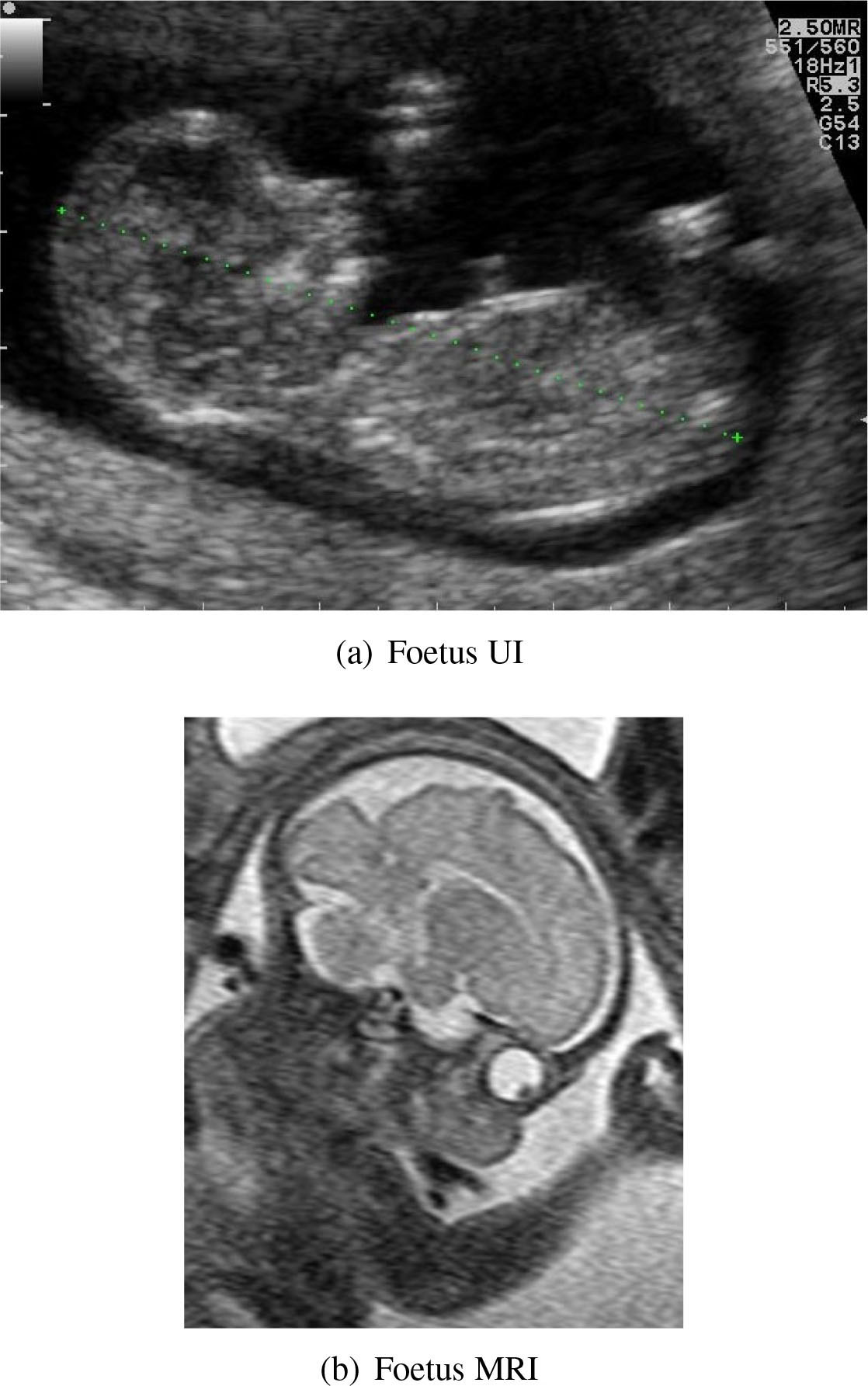
Once an image is uploaded, its pixels are perceived as a matrix of intensities,
In the processing of the images of Fig. 1, low-pass filters were used to assess some statistical properties of a local region of the image, since they allow for the smoothing of it. In particular, mean filtering is a method that can reduce image noise without blurring the image contours by reducing the amount of intensity variation between neighbouring pixels. It works by moving through the image, pixel by pixel, replacing each value with the median of the neighbouring pixels, including itself. It is a nonlinear method especially suited for removing impulsive noise, frequently present in limited regions of medical images, and can be applied iteratively [29, 30]. The pattern of neighbours is called the “window”,
Contour filters could be used to identify the borders of ROI. Edges are points where the intensity image function changes abruptly. Edge detectors are a collection of local image pre-processing methods used to locate changes in the brightness function. Of the most used techniques of edge filters are Sobel, Canny, Prewitt or the Laplacian of the Gaussian Operator, all of them with good performance when applied to images with low-noise and high-contrast. The Canny filter, for instance, is considered one of the best-defined methods to provide reliable detection [31]. Operators that describe edges are expressed by partial derivatives. A change of the image function is indicated by a gradient that points in the direction of the largest growth of the image function. An edge is a vector variable with two components, magnitude and direction. The edge magnitude,
Modified median and gradient filters are used to pre-process medical images which show poorly defined structures and are heavily corrupted by noise. Their results are the only features extracted from the image that will be used as input of the classification methods proposed in the next sections to identify regions in the image (ROI). Thus, the image feature vectors have only two components: the median and the gradient of the image. These feature components are sufficient to find the regions of interest (ROI) in the image. This choice is subject to the proposed methods and algorithms being hardly tested in order to determine its performance and robustness. Other components can be added to improve the results of the algorithms whenever more rich and discriminant features are desired.
In this work, an iterative median filter is used on the images. The procedure resembles an iterative restoration of the image, done from the highest degree of similarity to the lowest. Other options for this task could be the median filter, although it has drawbacks such as: (i) one point with a very unrepresented value can significantly affect the mean value of the points in the neighbourhood; (ii) the filter does not work very well when the neighbourhood straddles an edge. Besides, the median filter is a more robust filter.
We start by filtering the original image,
where
Gradient filter
To minimise both the noise effect and the blurred edges, we recalculate the gradient magnitude for each pixel by measuring the alignment between the gradient directions of all the pixels in the circular region
This operation improves significantly the coherence of the results of the gradient filter.
Features used in image segmentation. Left: The median; Right: The gradient.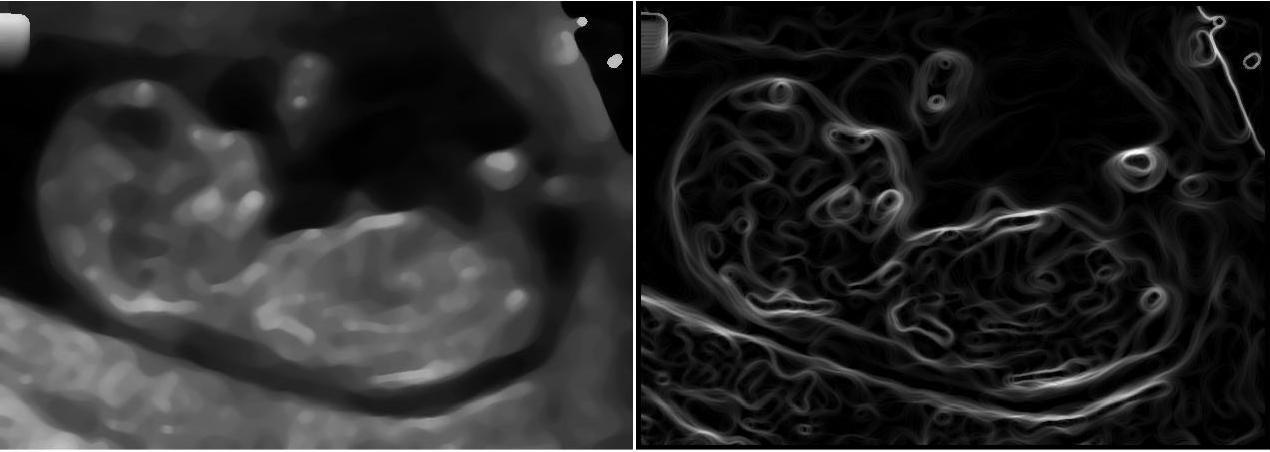
An image is a set of
In order to segment the image, one starts by defining the ROIs. For instance, for the obstetric image on the right of Fig. 1, an interesting segmentation could be the separation of the image into the following ROIs: foetus, amniotic sac and uterus. Every defined ROI corresponds to a class
To segment the image into
Often, training classifiers using all image pixels do not lead to a better solution. Large sets of training data cause difficulties to the training process and make it time-consuming. Additionally, the training process can fail, even when in the presence of very similar data groups, which show redundancy and a low level of discrimination, even when the mean absolute error is small. For these large-sample problems, diverse clustering techniques can be used to group the samples in order to have a group represented by a single value. Here, the simple nearest neighbourhood clustering scheme is used as the aggregation method of the data. This method can be seen as a 1-nn algorithm and is described in Subsection 3.1. The
Aggregation method
To reduce the dimensionality of the problem, the points may be aggregated in FS as well as in PS. Neighbour groups are constructed in FS and represent regions of pixels that have the same or similar feature values. A group is an ellipsoid region in FS with center
To aggregate in FS, consider set
If If
For every
In the end of the procedure, the FS set
Moreover, as
Also
and
Define
Definition of the ROIs for UI.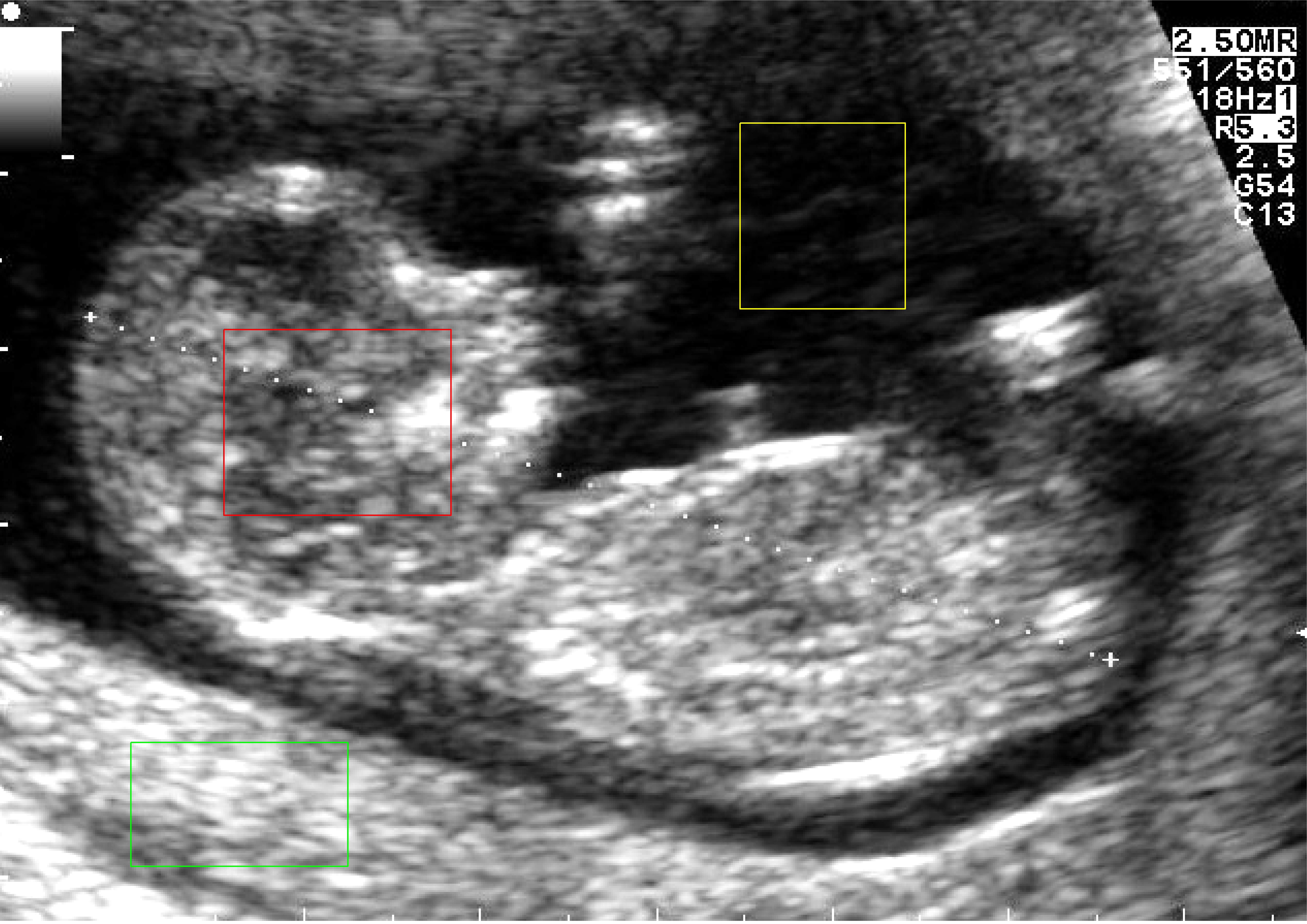
The TS is constructed according to the defined ROIs. That is, we select a rectangle for every ROI and every ROI should have one rectangle associated. In Fig. 3 we show the selection of ROI for the UI used in Experiment-2 of Section 5. These rectangles are the classes
Every point in TS is already classified:
Consequently, the whole TS defined in Eq. (1) is transformed into:
and features
with
The training examples are vectors in a multidimensional FS, each with an assigned class label. The training phase of the algorithm lies in storing the feature vectors of the training samples and the respective class labels. A peculiarity of the
The aim of the segmentation algorithm is to classify and partition all the points of the image into
Consider some norm
The classification of point-
for the
where
Two versions of the
Version-1: Refinement of the standard
-nn
To apply the algorithm, we start by selecting
The whole data has been aggregated in FS and, after the aggregation, has size
To classify every point
If Calculate the similarity of point
where Compute the score value Every classified point
In the end of the procedure all the data is classified, therefore:
MRI of Experiment 1. Left: ROIs; Right: Features.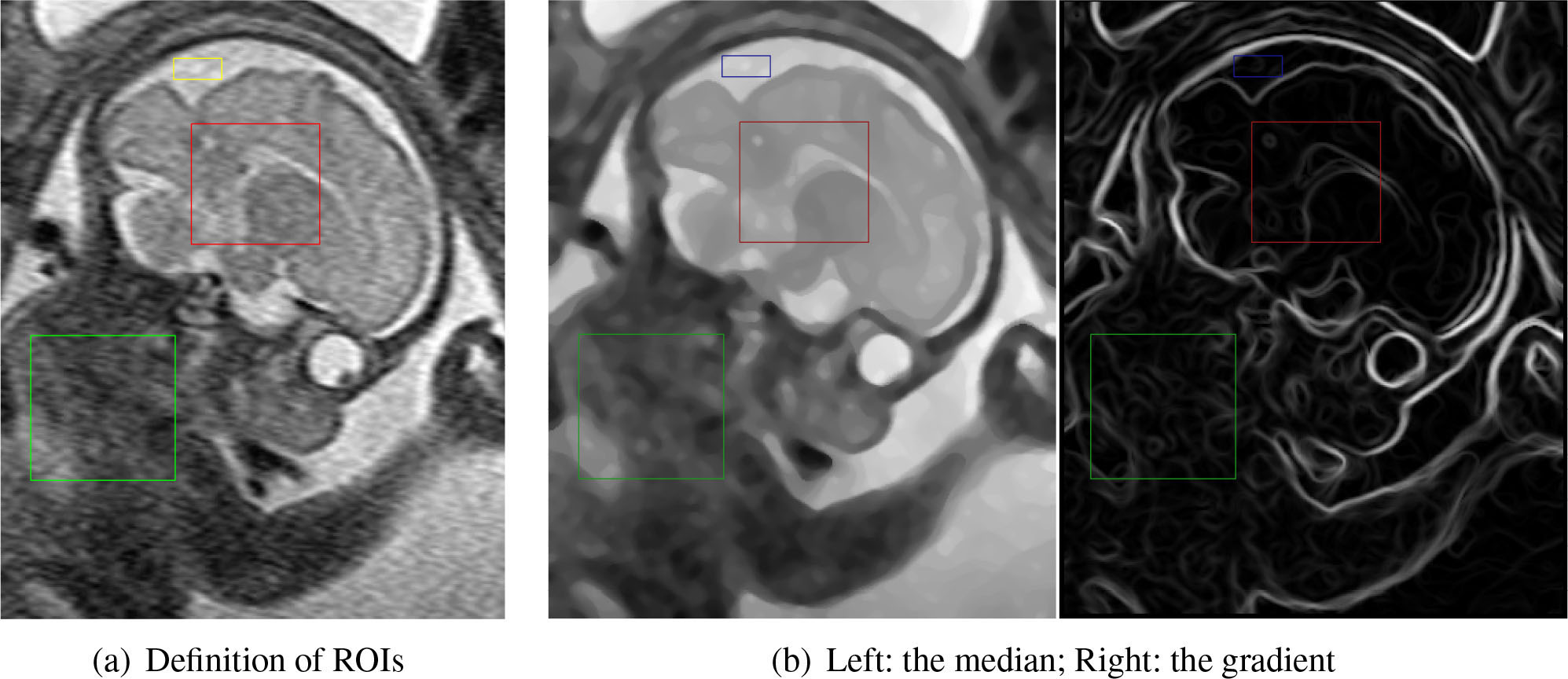
Colour codification of the ROI considered for this MRI, the TS: brain (red), remaining body (green), intra-cranial space (blue) and contours (grey green).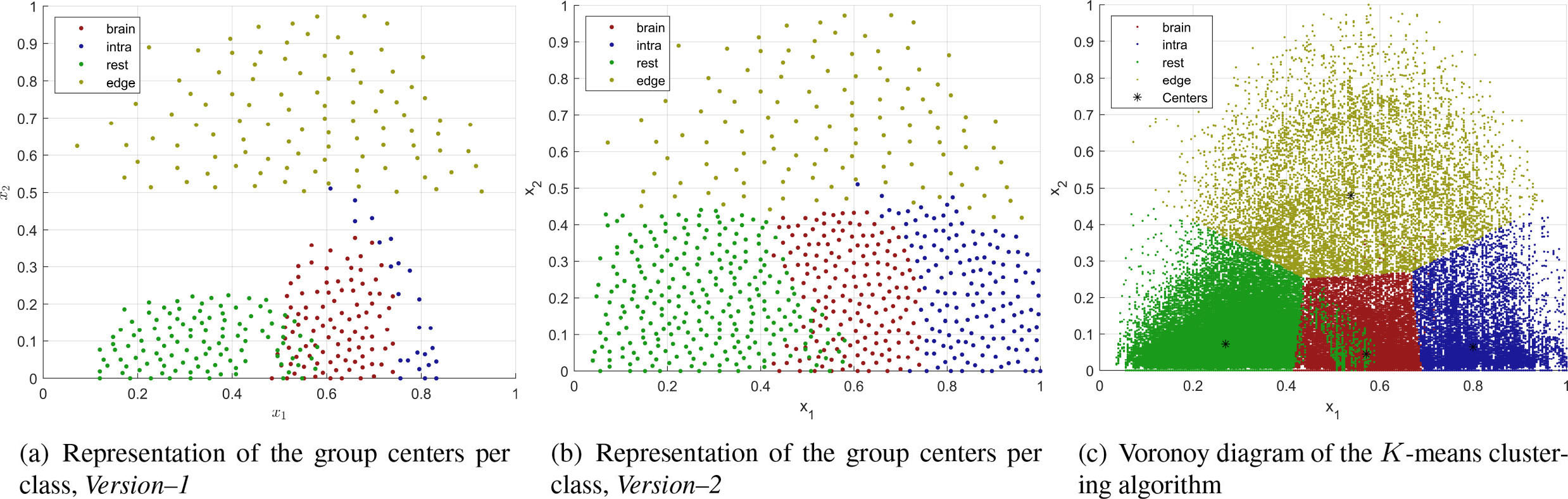
Final result of the segmentation of the MRI into prescribed ROIs.
Classification reliability per classes. From left to right: brain, remaining body, intra-cranial space and contours.
Percentage of points classified in every iteration.
To start the algorithm, one needs to select
All points
Binary classification results obtained with the 
Colour codification of the ROI considered for this UI, the TS: foetus (red), uterus (green), amniotic sac (blue) and contours (grey green).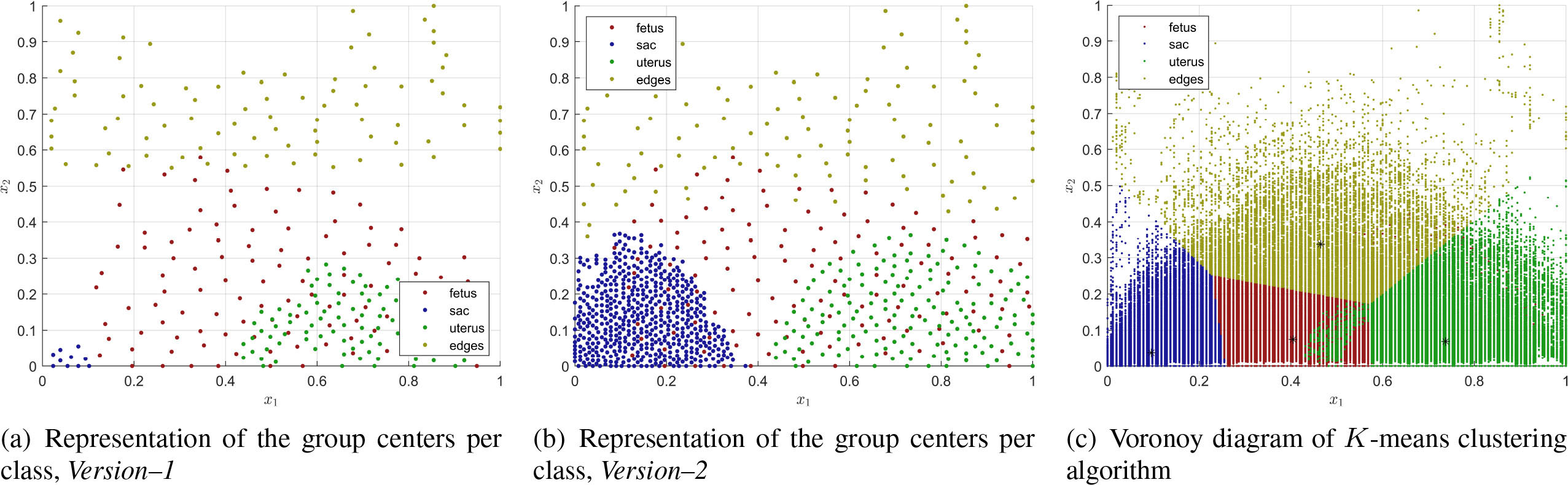
For every iteration ni
Version-1 is used to classify all the data using the information stored in A variable threshold is used to eliminate points classified with low reliability to squeeze the confidence interval. Thus, to define the variable, recall the CBF value for the point as in Eq. (6) and calculate Determine the set of points well classified, that is, points whose CBF value Register in The well classified points move to TS. This means that TS grows in every iteration. The points classified with low reliability remain in
We want to assess the performance of both versions of the
Experiment 1
Consider the MRI of Fig. 1b that we want to segment into the following ROI: brain, remaining body, intra-cranial space and contours. In this way, we obtain a TS with 4 classes,
The degree of discrimination between the classes may be judged from the representation of the group centers in FS that belong to every class in Fig. 5a. One may observe that the brain (
Final result of the segmentation of the UI into prescribed ROIs.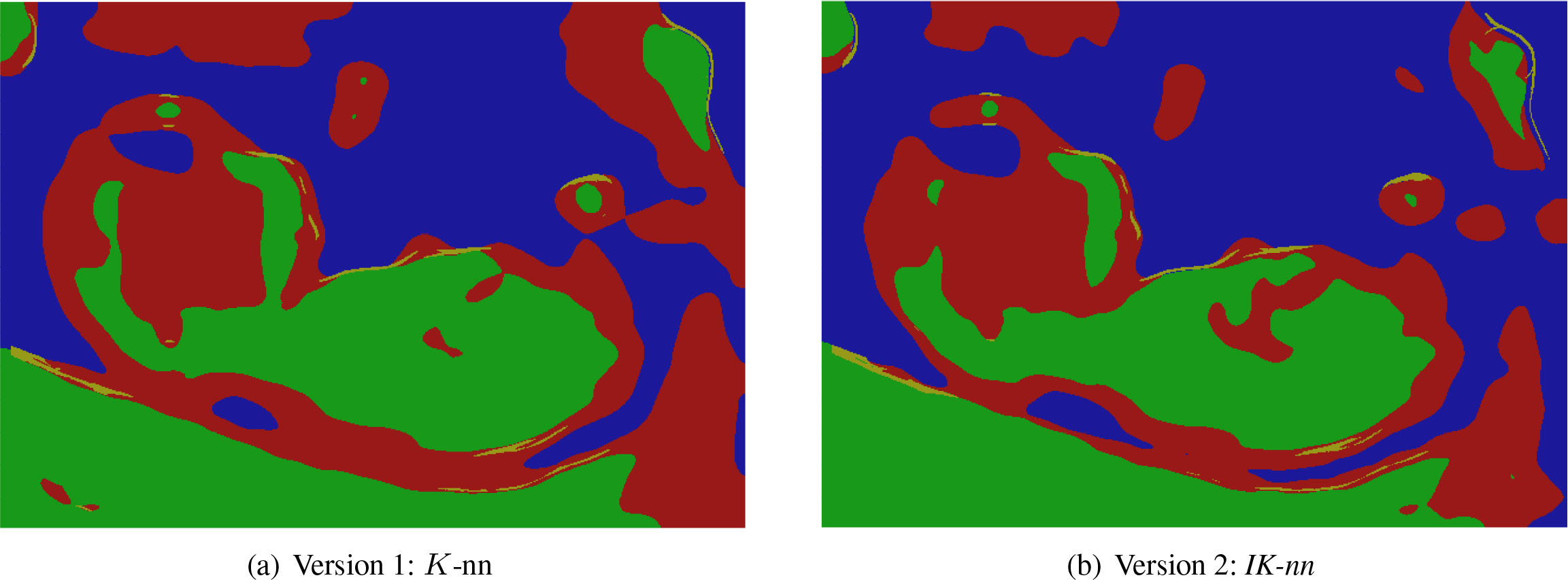
Classification reliability per classes. From left to right: foetus, amniotic sac, uterus and contours.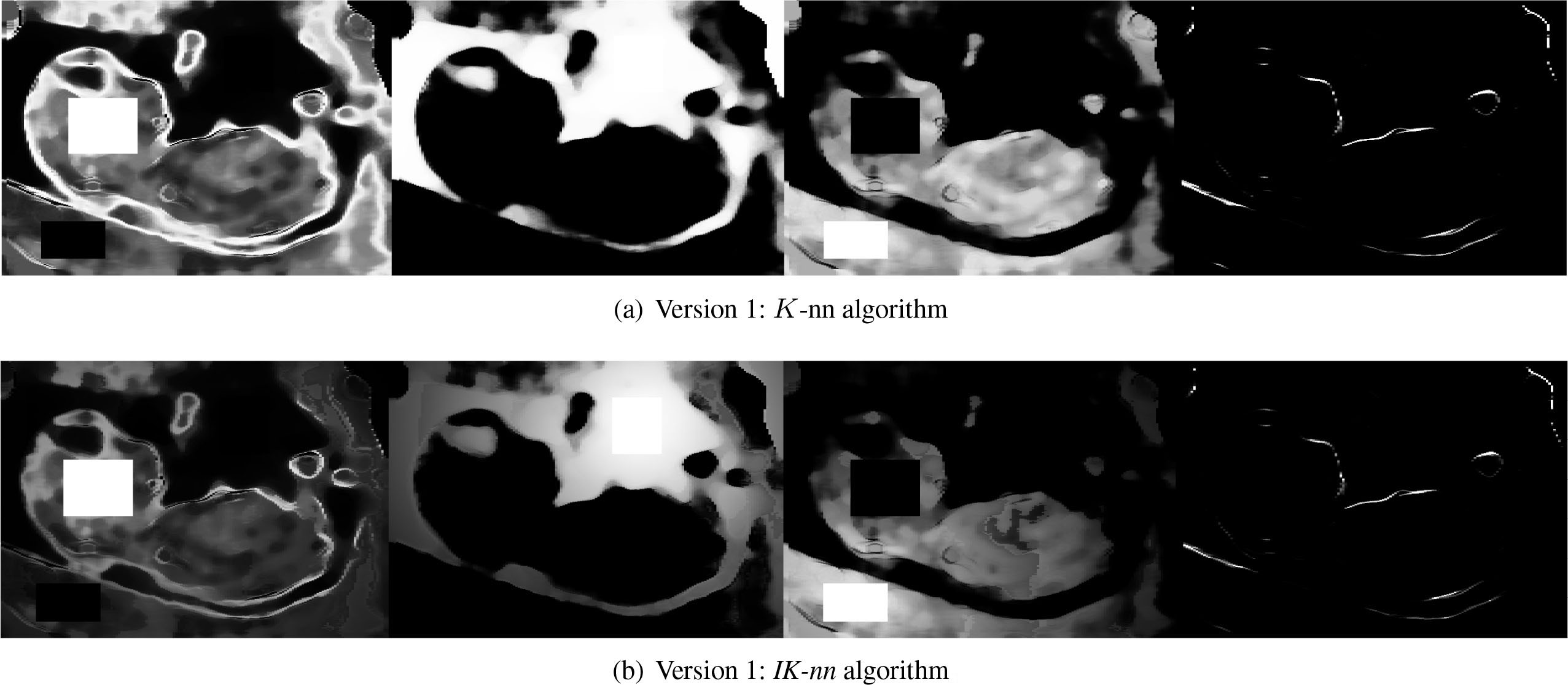
The final result of the classification using both versions of the algorithm is shown in Fig. 6. The result of the segmentation done by both versions of the algorithm is quite good although an attentive eye can see the superiority of the results obtained with the iterative version. However, the big gain in using IK-nn is its higher degree of reliability in the classification, as can be observed by the analysis of Fig. 7.
In these images, white represents the highest level of reliability in the classification and black corresponds to zero reliability. Since these are medical images to be used for diagnosis purposes this becomes very relevant.
Both results are compared with the
Figure 9 shows the results of the classification obtained with the
Binary classification results obtained with the 
Percentage of points classified in every iteration.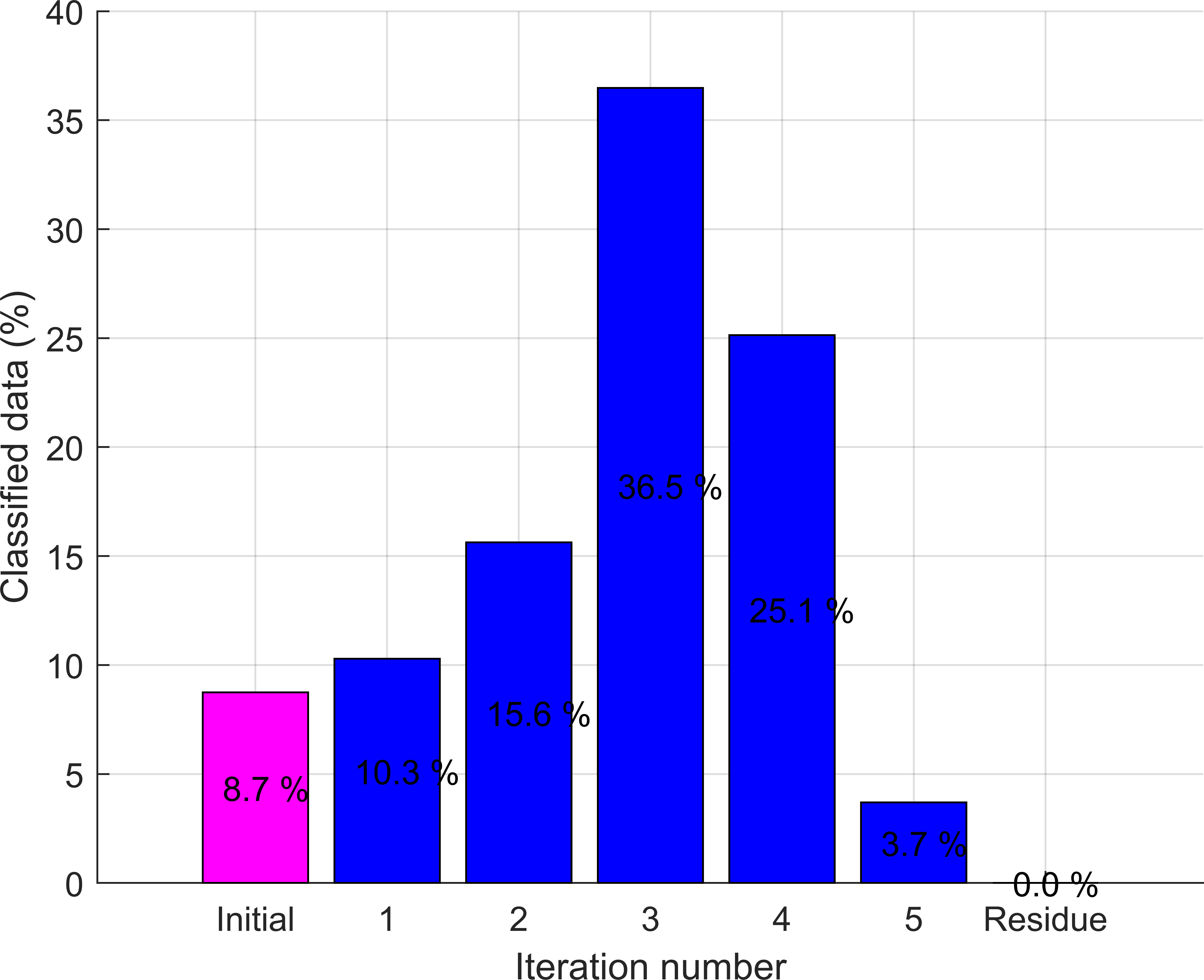
Consider the UI of Fig. 1a that we want to segment into the prescribed ROI previously defined and shown in Fig. 3: foetus, amniotic sac and uterus. The representation of the features can be seen in in Fig. 2. Observing Fig. 10a, one sees even more inter-twinning between two classes, i.e., the fetus (
The final result of the classification using both versions of the algorithm is shown in Fig. 11. As it happens in Experiment-1, the segmentation done by both versions of the algorithm is comparable and the big gain lies also in the higher degree of reliability of IK-nn shown in Fig. 12.
Both results are also compared with the
The results of of IK-nn were obtained in 5 iterations and the percentagem of points classified in every iteration and that are meant to engross the TS are meant in Fig. 14. The initial fuchsia bar represents the initial reference data.
Conclusion and future work
Since the automatic treatment of images towards diagnosis is nowadays paramount, in this work we studied the segmentation of obstetric images. To improve the results, some pre-processing of the data has been done to extract the features necessary to the application of the algorithm and also to agglomerate the data in both FS and PS. The developed algorithms used for the segmentation of the images are based on the
Both algorithms have been demonstrated in two different experiments, using different technologies images. Very good results have been obtained with the MRI. When applied on UI, the results were not as good but they were still satisfactory given the low quality of the image and the degree of discrimination. The methods have been validated against the
Footnotes
Online ISSN: 1469–0705.