
Abstract
Evolutionary algorithms have been used to solve a variety of many-objective optimization problems, where these problems contain more than three conflicting objectives. Most existing evolutionary algorithms have shown to perform well on many-objective optimization problems with regular Pareto optimal fronts, their performance, however, will often considerably deteriorate on those whose Pareto optimal fronts are irregular, e.g., discontinuous, degenerated and convex. To address this issue, in this paper, we propose a region division based many-objective optimization evolutionary algorithm, termed RdEA, where a region division approach is suggested to maintain diversity of population for many-objective optimization (especially for problems with irregular Pareto fronts). In the proposed region division based diversity maintaining approach, the geometric information of Pareto optimal fronts is taken into account by using the non-dominated solutions found at each generation, which helps to solve the problems with irregular Pareto optimal fronts better. The proposed RdEA is compared with five state-of-the-art many-objective evolutionary algorithms on 16 test problems from two test suites DTLZ and WFG and a real-world optimization problem. Experimental results on these problems demonstrate that the competitiveness of the proposed algorithm in solving many-objective optimization problems, especially for those with irregular Pareto optimal fronts.
Introduction
Most real-world optimization problems are characterized by the existence of multiple, often conflicting, objectives [1, 2], such as electrical engineering [3], engineering modelling [4, 5, 6, 7], industrial scheduling problems [8, 9] and robotics and control [10, 11, 12]. These optimization problems are called multi-objective optimization problems (MOPs), which involve more than two objectives [13]. Many-objective optimization problems (MaOPs) refer to MOPs involving more than three objectives [14], which are very common in real-world applications, see e.g. [15, 16, 17]. For MOPs, there does not typically exist a single solution that minimizes all objectives simultaneously. Hence, attention is paid to Pareto optimal solutions, that is, solutions that cannot be improved in any objective without degrading at least one of the other objectives [13, 18, 19, 20, 21]. Suppose
Existing approaches mainly focused on convergence enhancement for solving MaOPs and have achieved great success on MaOPs with regular PFs [22], but have paid few attentions to maintain the diversity of populations, which would lead to the fact that the found solutions are not uniformly distributed if no additional diversity maintenance strategies are included for MaOPs with irregular PFs.
For this reason, some powerful diversity maintaining strategies have been proposed in MOEAs for obtaining uniformly distributed solutions of MaOPs, see, e.g., MOEA/D [25], NSGA-III [26] and
Despite of these reference-based diversity strategies, there are also some strategies adopting region division based approaches for diversity maintaining, e.g., MOEA/D-M2M [30], MOPSO-M2M [31], and GrEA [32]. In MOEA/D-M2M and MOPSO-M2M, the objective space is divided into a number of subregions and then all the subregions are searched using sub-swarms simultaneously. The experimental results on DTLZ1 and DTLZ2 with three objectives indicate that the MOPSO-M2M performs better than another PSO algorithms [33] in achieving a uniformly distributed solution set [31]. As for GrEA, the objective space is divided into a variety of identical hypercubes, and it can achieve a uniformly distributed result on most MaOPs with a lot of parameters adjusting procedure [32].
It is worth noting that the difficulty of diversity maintaining in MaOPs is caused by the curse of dimensionality [14]. In MaOP, as the number of dimensions increases, distance measures become increasingly meaningless for a limited size of population distributed in an extremely large objective space [34]. Traditional distance-based diversity maintaining strategies would fail to estimate the contribution of each solution to the diversity of the population, which results in the difficulty in diversity maintaining for these strategies. However, in the region division based diversity maintaining strategy, the objective space is divided into different subregions to classify solutions into different groups, and the contribution of each solution to the diversity of the population can be estimated, which enables this strategy to maintain diversity in high-dimensional objective space.
In this paper, we propose a region division based diversity maintaining approach for many-objective optimization to obtain uniformly distributed solutions for MaOPs with both regular and irregular Pareto optimal fronts. Meanwhile, the efficient non-dominated sorting (ENS) [35] applied in this paper is compared with approximate non-dominated sorting (A-ENS) [36], as well as another recent published algorithm which is designed for large-scale multi-objective optimization (LMEA [37]), the detailed discussions and comparison are given in the section of experimental results. To summarize, the main contributions of this paper are as follows:
A region division strategy is proposed to maintain diversity of populations for solving MaOPs. The key difference between existing region division strategies and that developed in this paper is that the proposed region division is performed based on the geometric information of the Pareto optimal front determined by the non-dominated solutions found at each generation. Due to the geometric information of the front, the proposed region division strategy can maintain a good diversity of populations on MaOPs with both regular and irregular fronts, thereby leading to uniformly distributed solutions. An evolutionary algorithm, termed RdEA, is developed to solve MaOPs based on the region division strategy. In RdEA, the diversity of populations is maintained by the region division in the sense that the number of subregions covered by solutions is prior to the convergence of solutions in the environmental selection. Extensive experimental results are conducted to verify the performance of RdEA for solving MaOPs by comparing it with five state-of-the-art MOEAs for many-objective optimization on two widely used test suites DTLZ and WFG. Empirical results demonstrate that RdEA holds a competitive performance for solving MaOPs, especially for those with irregular PFs.
The rest of this paper is organized as follows. In Section 2, the details of the proposed region division strategy and the RdEA for solving MaOPs are described. The performance of our RdEA by comparing with five state-of-the-art methods on many-objective optimization is presented in Section 3. Conclusions and future work are given in Section 5.
In this section, the proposed RdEA algorithm for solving MaOPs is presented. First, the general framework of RdEA is given and then the details of geometric information based region division are elaborated. Next, the region division based environmental selection is described. At last, the computational complexity of proposed RdEA is analyzed.
General framework of RdEA
The RdEA algorithm holds a similar framework as NSGA-II. The main difference between RdEA and NSGA-II is their environmental selection. In NSGA-II, the crowing distance is used to select solutions for next population, whereas the geometric information based region division is adopted in RdEA for maintaining diversity to solve MaOPs.
Algorithm 1 presents the general framework of RdEA in pseudo code, which consists of the following main components. First, an initial population of size
General Framework of RdEA
(population),
(size of population),
(times of division),
(threshold).
,
while termination criterion not fulfilled do
/*find the solutions in the first
fronts
,
, where
is the minimum value such that
*/
end
Return:
General Framework of RdEA
The geometric information based region division is the key component of the proposed RdEA to maintain diversity for solving MaOPs, especially for MaOPs with irregular PFs. The division procedure consists of two main steps: 1) calculating the geometric information of Pareto fronts, and 2) performing region division in objective space. The pseudo code of the region division procedure is given in Algorithm 2. In the following, we present the details of the two steps of the region division approach, respectively.
(population),
(time of divisions),
(first front),
(threshold).
The geometric information considered here is the curvature [38] and boundary of the Pareto fronts, which are two important elements for characterizing the geometric shape of a front [16]. We first consider how to approximately calculate the curvature by using the solutions found during the search stages, where the curvature information is applied to handle with the solution density imbalance between the central region and boundary region of the PF (especially for MaOPs with convex PFs). For instance, MOEA/D fails to find boundary solutions for WFG1 and WFG2 as the PFs of these two problems are convex [22]. For this end, let us assume that each Pareto front can be described by the following formula if the objective values have been normalized.
where
(non-dominated solutions).
(curvature).
ideal point of set
nadir point of set
for
do
/*Normalize the
th solution in
*/
end
for
find the extreme solutions in
/*Average the objective values in the same objective,
is the number of objectives */
/*
denotes the Euclidean distance from
to the original point*/
An example to illustrate the method to calculate the curvature of a Pareto front.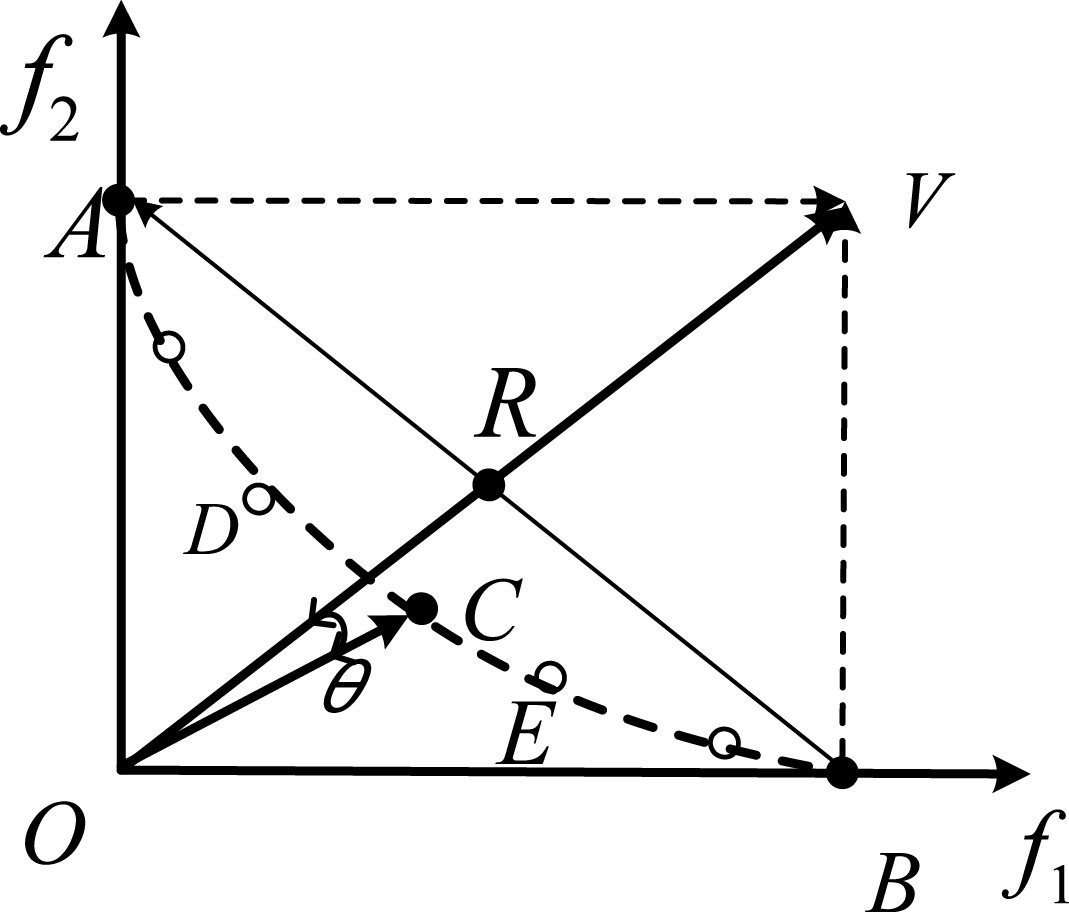
Figure 1 presents an example to illustrate how the curvature of a front is calculated by five non-dominated solutions
where
where
since for
For any solution
Next, we will show how to calculate the boundary of the Pareto front. Due to the fact that the aim of region division is to divide the population into several groups, we here determine the boundary of the populations to perform more effective division of population. Since the boundary is determined by several endpoints, we only need to determine these endpoints. It is necessary to stress that the endpoints we refer to are those obtained by current population, hence they may be not the ones located at each axis as given by Eq. (1). Algorithm 4 presents the details of the method for calculating the endpoints of the boundary.
For simplicity, Fig. 2 presents an example to illustrate how the endpoints of the boundary of a population are calculated, where the population consists of five solutions
An example to illustrate the method to calculate the boundary of a population.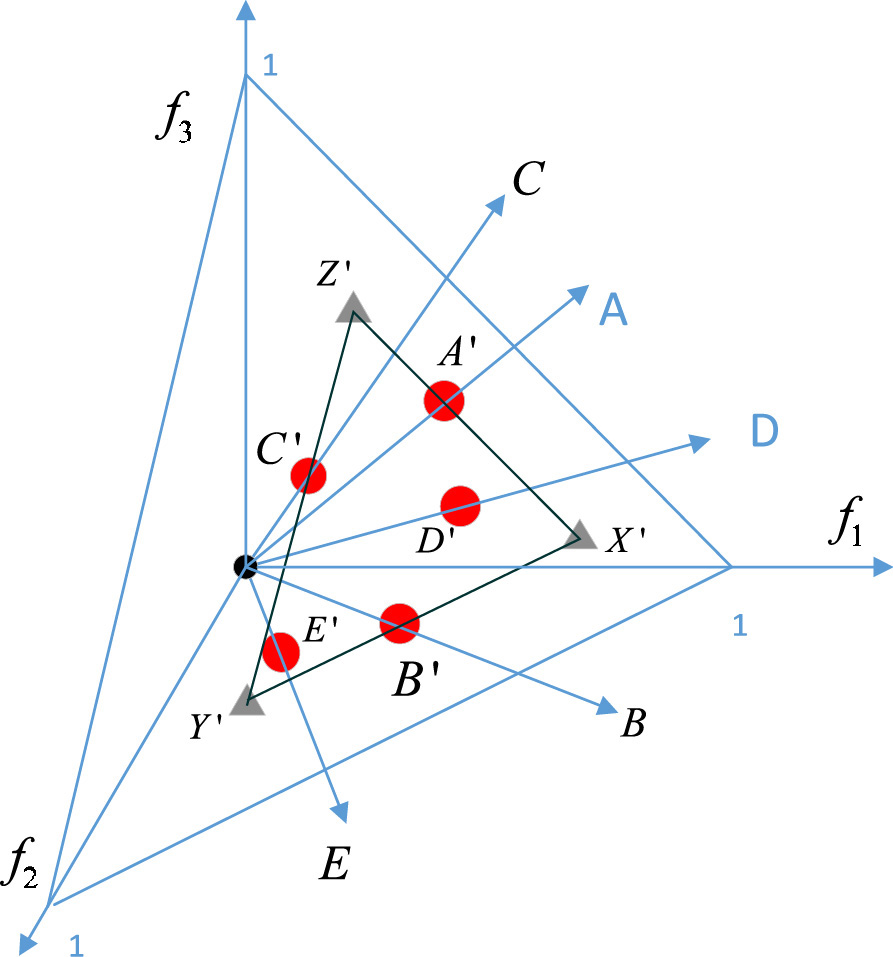
To analyze the influence of the parameter
IGD Values achieved by RdEA with different settings of parameter
After the curvature and boundary of the Pareto front are obtained, the proposed RdEA starts to divide the region covered by solutions in population into many subregions. Algorithm 5 presents the main steps of region division in RdEA.
Figure 3 presents an example to illustrate how the region division is performed by Algorithm 5 for an MOP with three objectives, where we assume that the curvature
First, the middle points between each two endpoints are calculated and normalized by Eq. (5) such that the normalized middle points
An example of the proposed region division method, where four subregions are obtained.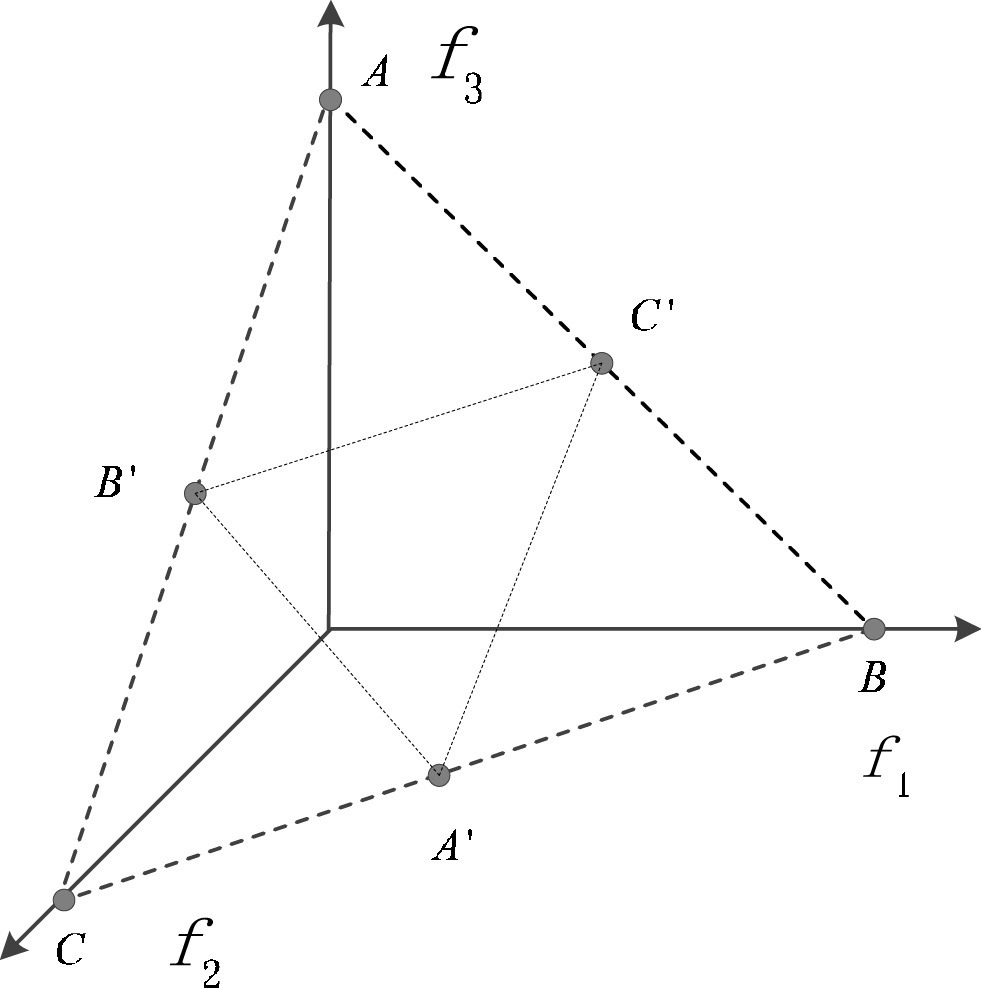
repeat steps 1 to 18 to divide the each smaller subregions
To visualize the region division in high-dimensional space, 10000 randomly generated 5-dimensional solutions are divided into
An example of region division in high-dimensional space, where 10000 solutions are divided into 216 subregions and the solutions in one selected subregion are highlighted.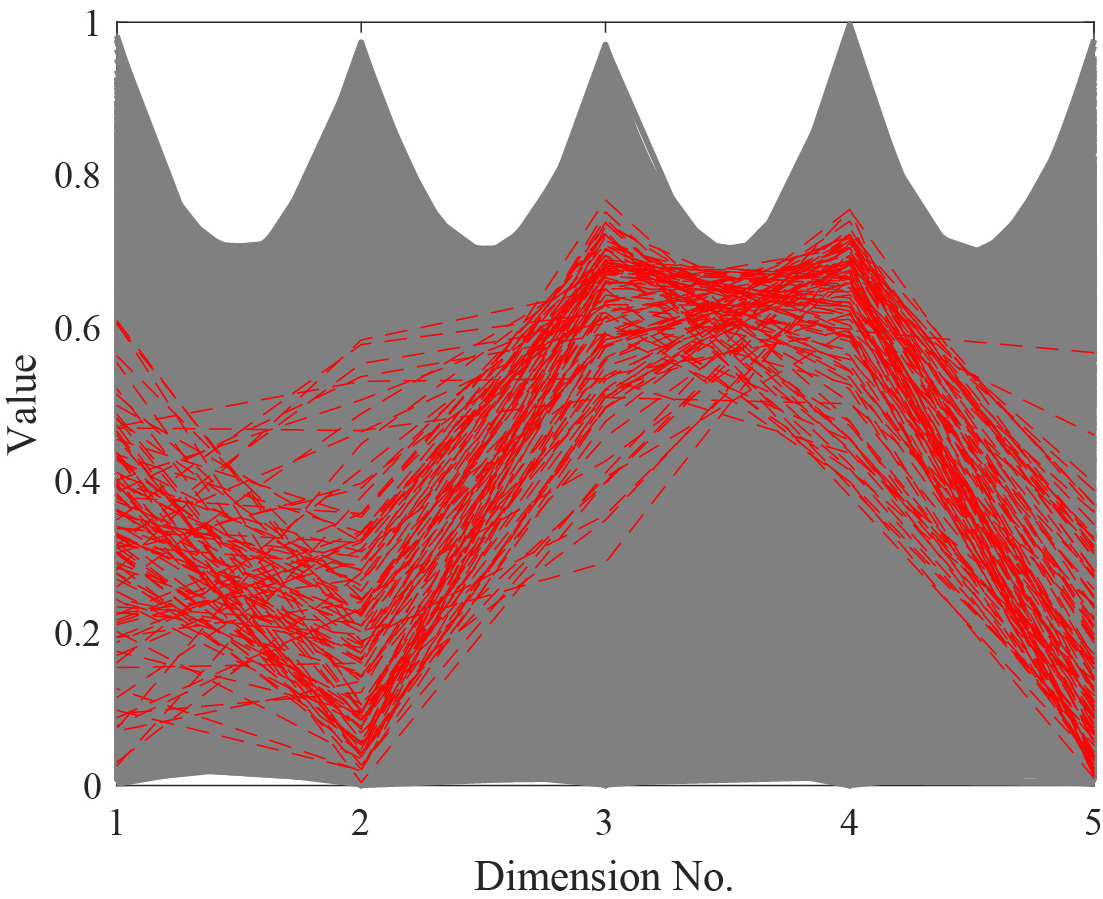
The region covered by solutions in population is divided into subregions by Algorithm 5, the RdEA will select solutions for next population according to the subregions in which the solutions locate in environmental selection. The environmental selection in RdEA is performed as follows.
Let us assume that the number of nonempty subregions is
where
(endpoints of each subregion),
(the Pareto fronts of the combined population),
(threshold of
)
(population),
(convergence level)
classify each solution to a subregion with label kind
calculate the acute angle between the solution and the central vector of its belongs subregion by Eq. (2)
merge the labels of nonempty subregions in kind
/*Put the solutions with the same label in the same set */
for
do
if
then
select the solution with the shortest Euclidean distance to the original point
else
select the solution with the smallest
value
end
end
for
update
by Eq. (6)
update
It is necessary to stress that there are some region division based algorithms for MaOPs (e.g., GrEA [32]), however the proposed geometric information based region division has some potential superiority. To illustrate this fact, Fig. 5 presents an example, where the population has seven solutions
An example to illustrate the region division based environmental selection in RdEA, where four solutions will be selected from a population having 7 solutions for next population.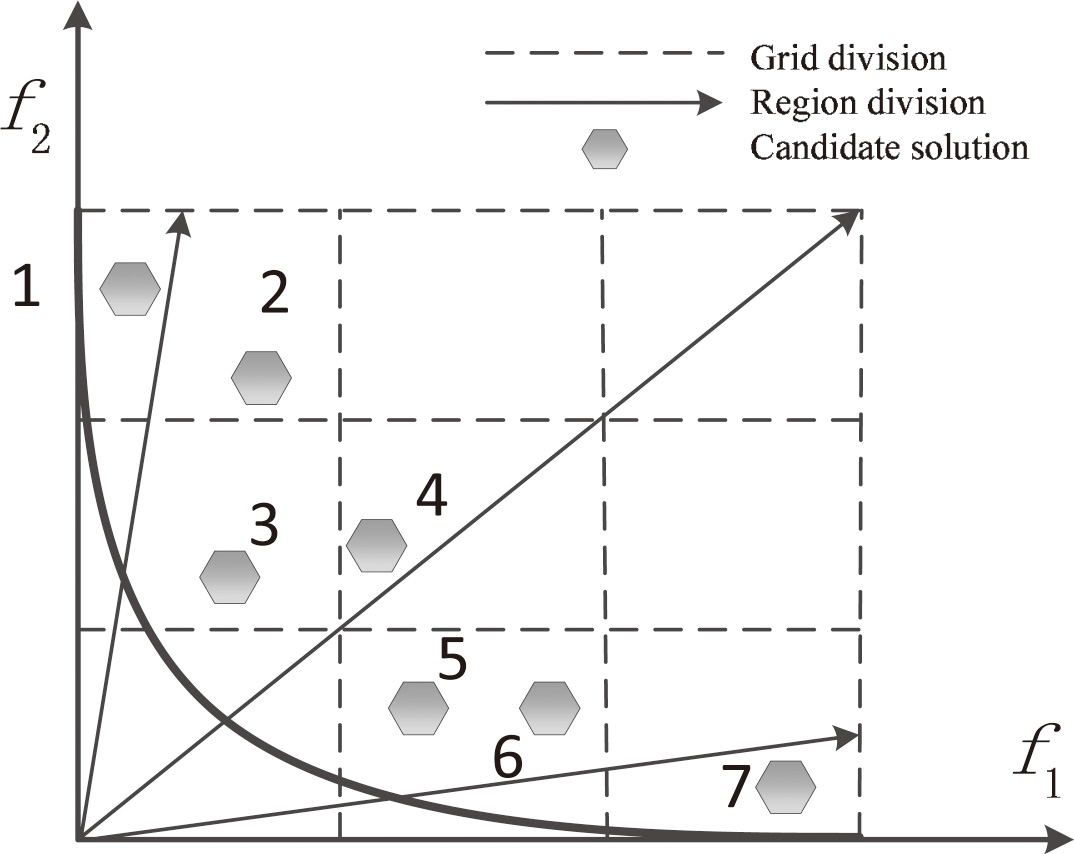
In this section, we provide an upper bound of the computational complexity of RdEA. Suppose that the RdEA with population size of
Experimental results and discussions
In this section, the performance of RdEA is verified by empirically comparing it with five popular MOEAs for many-objective optimization, namely, MOEA/D [25], NSGA-III [26],
Experimental settings
Test problems
In the experimental study, the tested 16 test problems consist of 7 DTLZ test problems (DTLZ1 to DTLZ7) and 9 WFG test problems (WFG1 to WFG9), whose settings are listed in Table 2. According to whether their Pareto optimal fronts are regular or not, these test problems are divided into two groups.
Problems with regular Pareto fronts. The regular Pareto fronts refer to the ones which are continuous or non-convex in this paper. Most real-world MaOPs would belong to this category and hence they are often used in evaluating the performance of MOEAs. Among the 16 test problems considered in the experiments, the test problems with regular fronts are DTLZ1 to DTLZ4, and WFG4 to WFG9. Problems with irregular Pareto fronts. The irregular Pareto fronts refer to those which are discontinuous, degenerated or convex in this paper. These test problems represent a group of challenging problems for existing MOEAs, and much work still needs to be performed for effectively solving them. Six test problems, DTLZ5 to DTLZ7 and WFG1 to WFG3, considered in the experiments belong to this category.
Settings of the number of objectives, the number of decision variables and the property of PF for each test problem
For a fair comparison, we adopt the recommended parameter values which have achieved the best performance for all compared algorithms. The parameters of the compared algorithms are set as follows.
Setting of population size in NSGA-III, MOEA/D,
-DEA and RVEA, where
and
are parameters controlling the numbers of weight vectors along the boundary of the Pareto front and inside it, respectively
Setting of population size in NSGA-III, MOEA/D,
The number of reference points for different test instances in IGD
Crossover and mutation operators. In all considered algorithms, the simulated binary cross- over [46] and polynomial mutation [47] have been adopted to create offspring. The distribution index of crossover is set to Population size. The population size of the proposed RdEA is determined by the number of divided subregions The IGD values of six MaOEAs on 30 test instances with regular Pareto optimal fronts and the best result in each row is highlighted
Number of runs and stopping condition. For each algorithm, 20 independent runs are performed on each test instance. The maximum number of evaluations is adopted as the termination criterion for all considered algorithms. For DTLZ1, the maximum number of evaluations is set to 700 N, 1000 N for DTLZ3 and 500 N for the remaining test problems, where
The IGD values of six MaOEAs on 18 test instances with irregular Pareto optimal fronts and the best result in each row is highlighted
The HV values of six MaOEAs on 18 test instances with irregular Pareto optimal fronts and the best result in each row is highlighted
Settings of other parameters. Following the practice in [48], the Tchebycheff function in MOEA/D is selected as the scalarizing function, and the neighborhood size
IGD results achieved by RdEA, A-ENS, and LMEA DTLZ2 and 10-objective DTLZ7 with 9 and 100 decision variables
Two widely performance metrics are used to assess the performance of the compared algorithms on benchmark test problems. The first one is the Inverted Generational Distance (IGD) [43], which can assess both the convergence and distribution of the solution set obtained by MOEAs. Suppose that
where
The non-dominated front obtained by each algorithm on DTLZ1 with ten objectives in the run associated with the best IGD value.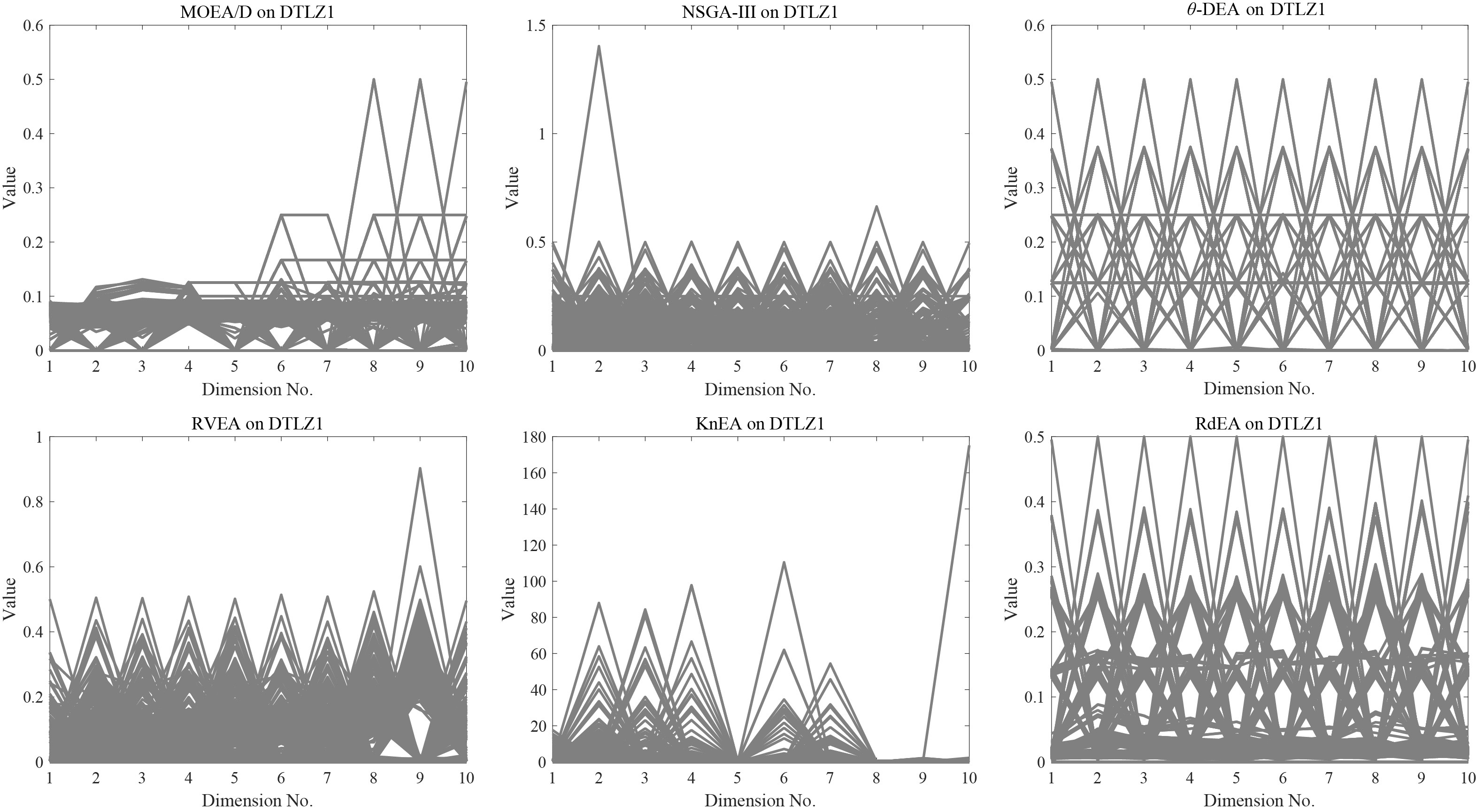
The second performance metric adopted in this paper is the hypervolume (HV) [44]. Generally, hypervolume is favored because it captures in a single scalar both the closeness of the solutions to the optimal set and, to some extent, the spread of the solutions across objective space. Given a solution set
where
and
where
Note that, a smaller value of IGD will indicate a better performance of the algorithm; in contrast, a greater value of HV will indicate a better performance of the algorithm.
In the following, we verify the performance of the proposed RdEA on test problems with regular fronts and those with irregular fronts.
Performance on MaOPs with regular fronts
Table 5 presents the IGD values of the compared algorithms on ten MaOP test problems with regular Pareto fronts, where the best result achieved by the algorithms on each test instance is highlighted. From Table 5, we can find that the proposed RdEA holds a competitive performance on the test problems with regular Pareto fronts in terms of both convergence and distribution of obtained solution set. Among the 30 test instances belonging to this category, RdEA obtains 8 best IGD values, while NSGA-III, KnEA,
The final non-dominated solutions achieved by each algorithm on DTLZ1 with 10 objectives are displayed in Fig. 6. It can be observed that the proposed RdEA has achieved a set of totally converged and uniformly distributed solutions. Therefore, it can be concluded that the performance of proposed RdEA is competitive with the other five state-of-the-art MaOEAs on MaOPs with regular Pareto fronts, especially for the performance in the distribution of obtained solution set.
Performance on MaOPs with irregular Pareto fronts
Tables 6 and 7 show the IGD and HV values achieved by the compared algorithms on the six benchmark problems with irregular Pareto fronts, where the best result achieved by the algorithms on each test instance is highlighted. It can be found from the tables that the proposed RdEA outperforms the five compared MaOEAs on MaOPs with irregular fronts in terms of IGD values. Among these test instances with irregular fronts, RdEA achieves 14 best IGD values out of 18 test instances. It seems that KnEA also holds a competitive average performance on problems with irregular Pareto fronts, whose number of the best IGD values is ranked the second among the six considered algorithms. In Table 7, RdEA achieves 9 best results on 18 test instances, which is the best among the six algorithms under consideration. Therefore, we can conclude that the proposed RdEA outperforms the five compared algorithms on MaOPs with irregular Pareto fronts, in terms of both convergence and distribution.
To take a closer look at the distribution difference between the final non-dominated solutions achieved by different algorithms, Figs 7–9 depict the non-dominated solutions with the lowest IGD values obtained by each algorithm among 20 runs in the objective space on four test problems with irregular Pareto fronts, namely, DTLZ5, DTLZ7 and WFG1. These three test problems are used for describing three classes of irregular Pareto fronts, namely, degenerated, discontinuous and convex.
The non-dominated front obtained by each algorithm on DTLZ5 with three objectives in the run associated with the best IGD value.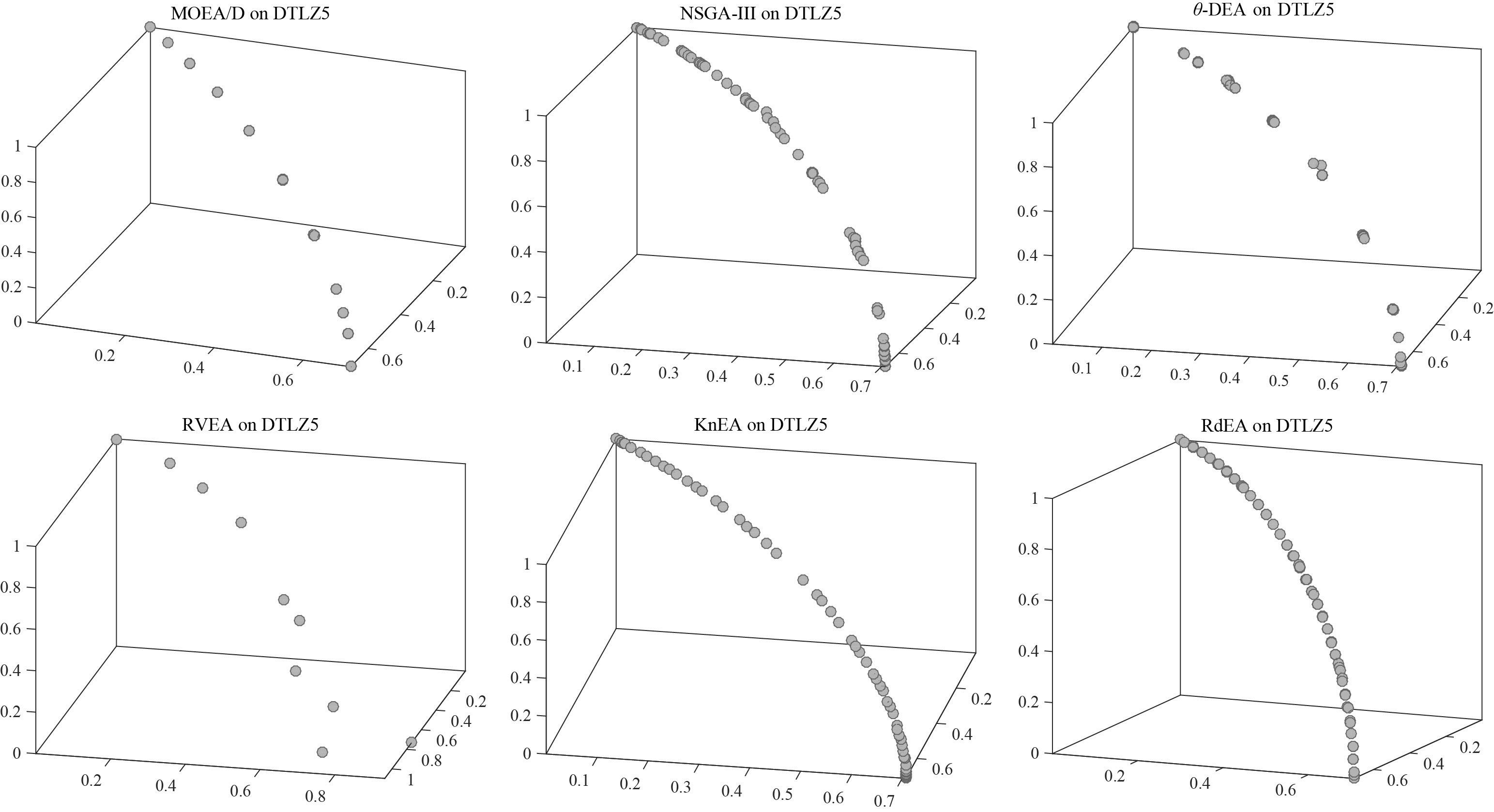
The non-dominated front obtained by each algorithm on DTLZ7 with three objectives in the run associated with the best IGD value.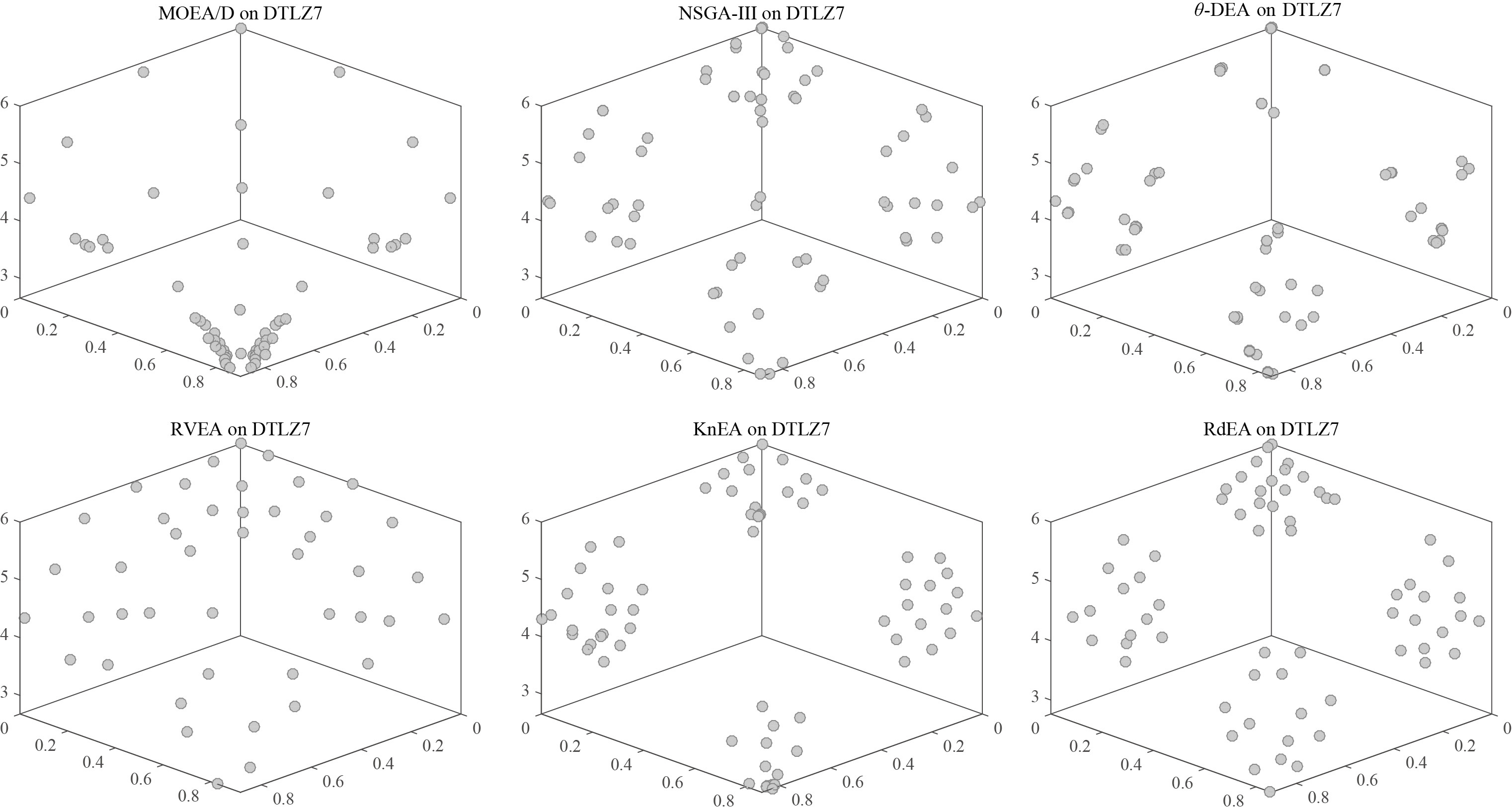
The non-dominated front obtained by each algorithm on WFG1 with three objectives in the run associated with the best IGD value.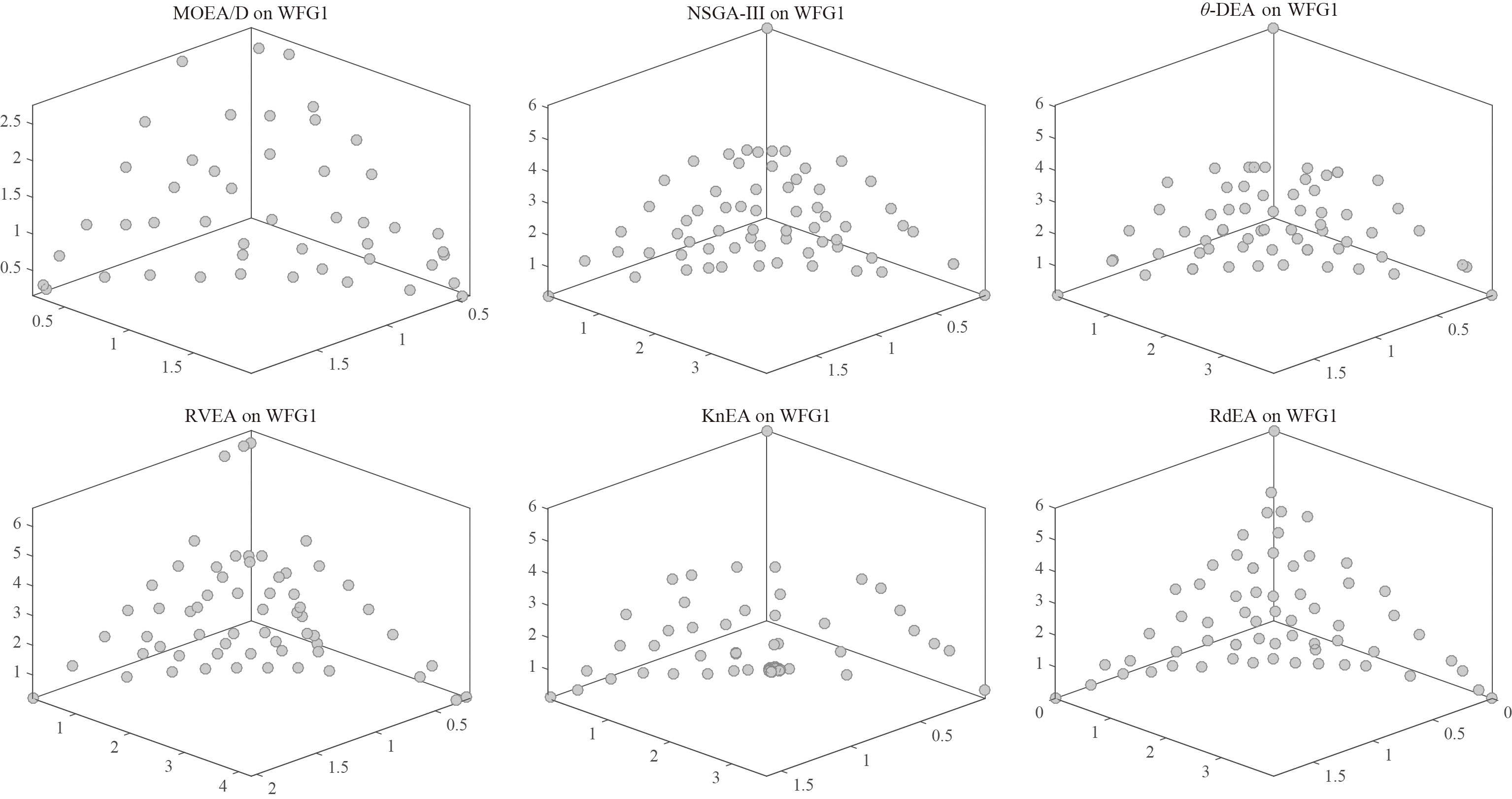
As seen from Fig. 7, the Pareto optimal front of 3-objective DTLZ5 is a degenerated line. It can be found that NSGA-III and KnEA have a promising performance in obtaining uniformly distributed solutions on DTLZ5. Compared to these two algorithms, the proposed RdEA can achieve a better distribution on DTLZ5. As for DTLZ7 with three objectives, its Pareto front consists of four discontinuous sub-fronts. From Fig. 8, we can find that it is hard for all six algorithms to achieve a set of uniformly distributed solutions in each of the four sub-fronts of 3-objective DTLZ7. It seems that KnEA and RdEA can obtain a slightly better distribution than the other four algorithms on DTLZ7 with three objectives. Similar results can be observed from Fig. 9 for WFG1 with three objectives, whose Pareto optimal front is a convex curve in the first quadrant of the objective space. The RVEA and the proposed RdEA seems to perform better than the other four algorithms in terms of distribution, despite that this issue is hard for all algorithms on 3-objective WFG1.
Design variables of the vehicle model.
The non-dominated front obtained by each algorithm on crash-worthiness design of vehicles for complete trade-off front.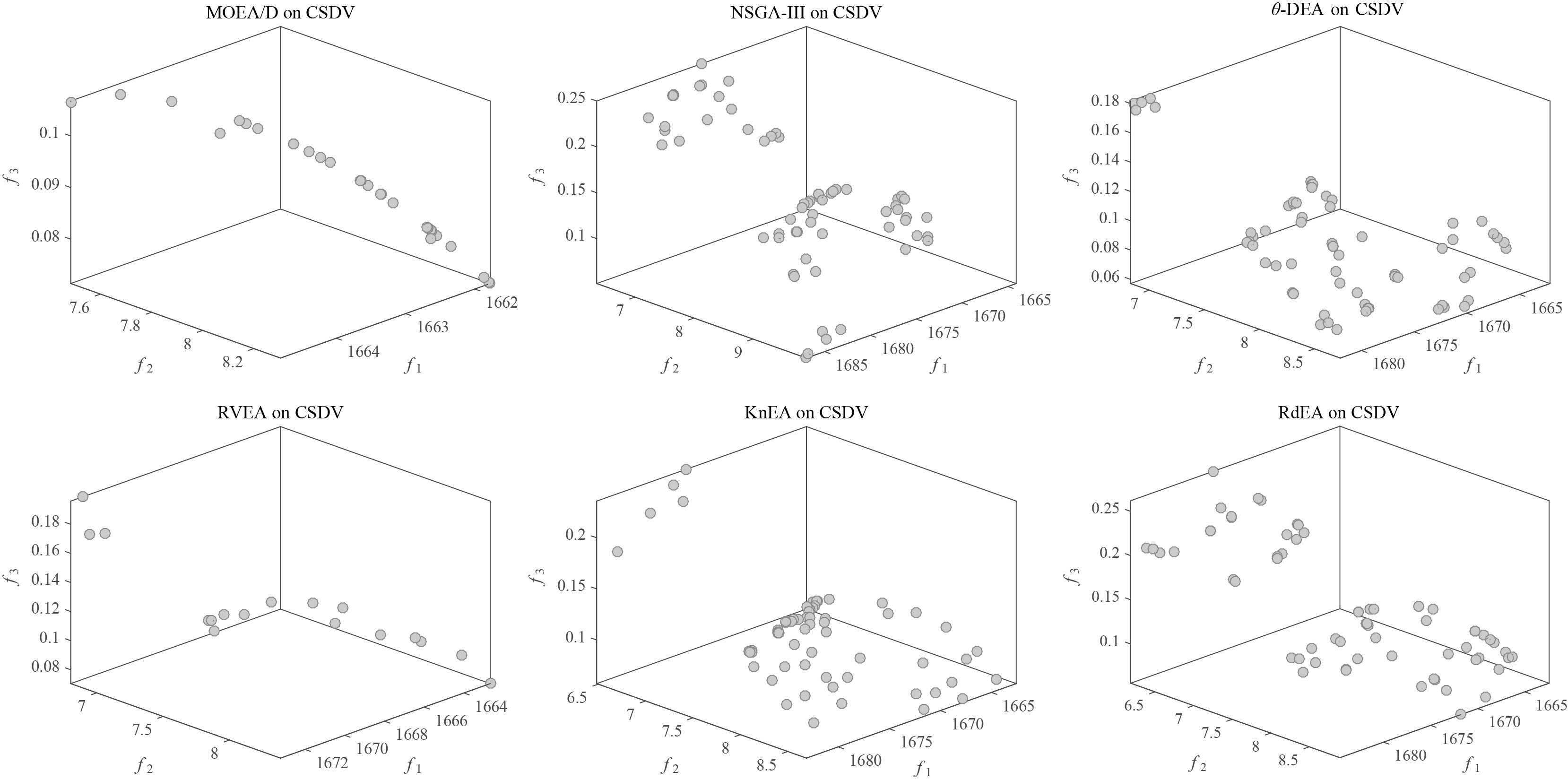
From Figs 7–9, we can therefore conclude that the proposed RdEA holds a competitive performance on MaOPs with irregular Pareto fronts in terms of distribution. Therefore, the proposed RdEA is well suited to solve MaOPs in obtaining a set of uniformly distributed solutions, especially for those with irregular Pareto fronts.
In the proposed RdEA, the non-dominated sorting method is adopted to rank the solutions in terms of Pareto dominance relationship. It is import for RdEA as the better converged solutions (non-dominated solutions) can be distinguished for accelerating the convergence rate of the algorithm. In [36], an approximate efficient non-dominated sorting (A-ENS) approach is proposed for many-objective optimization, where the approximate dominance relationship between two solutions is determined by a maximum of three objective comparisons on top of a sorted population according to one of the objectives. Besides, a decision variable clustering-based evolutionary algorithm, named LMEA, is proposed for large-scale many-objective optimization [37] (with more than 100 decision variables), where the decision variable clustering method is adopted to divide the decision variables into convergence-related variables and diversity-related variables. The performance of RdEA, A-ENS, and LMEA on 10-objective DTLZ2 and DTLZ7 with up to 100 decision variables are investigated. Note that, A-ENS is used in NSGA-III to achieve the best performance, and the population size for these algorithms is set to 215 with the maximum number of iterations being set to 500 on all these test instances. The IGD results achieved by RdEA, A-ENS, and LMEA are displayed in Table 8. From the comparison results, we can find that the proposed algorithm is more suited to deal with many-objective with irregular fronts in case the length of decision variables is not large.
One important engineering problem, namely crash-worthiness design of vehicles (CSDV) for complete trade-off front [49] in the area of vehicles design, is used as application example to test the performance of the proposed RdEA on solving real-world engineering problem.
The CSDV problem aims at structural optimization of the frontal structure of vehicles for crash-worthiness, where the thickness of five reinforced members around the frontal structure are chosen as the decision variables. Figure 10 presents the design variables (denoted by
The mass of vehicle. Deceleration during the full frontal crash (which is proportional to biomechanical injuries caused to the occupants). Toe board intrusion in the offset-frontal crash (which accounts for the structural integrity of the vehicle).
Further details regarding the CSDV model can be found in [26, 49].
The proposed RdEA has been tested to solve the CSDV problem and its performance has been compared with MOEA/D, NSGA-III,
The final non-dominated solutions obtained by the six compared algorithms are displayed in Fig. 11. The HV values achieved by these algorithms over 20 runs are obtained: MOEA/D (1.78e
Note that, the difficult for solving CSDV lies in the nonlinearity of this problem, where its Pareto optimal front is a discontinuous 3-dimensional surface with a hole in the central region. Existing MaOEAs fail to obtain a set of representative solutions which are spread on the entire approximation Pareto front, e.g., MOEA/D has obtained a set of solutions distributed on part of the approximation Pareto front, and RVEA fail to find the solutions around the hole of the approximation Pareto front. This problem demonstrates the overall performance of RdEA in finding a representative set of points on the entire Pareto optimal front, where the practical problem is hard for existing methods due to the differences in scaling of objectives and complex Pareto optimal front (such as potential holes in the Pareto optimal front, etc.).
In this paper, a region division based diversity maintaining approach has been proposed for many-objective optimization. For solving MaOPs with irregular Pareto fronts better, the proposed approach uses geometric information of the front obtained by non-dominated solutions at each generation in region division. An evolutionary algorithm, termed RdEA, has also been suggested to solve MaOPs based on the proposed region division approach. Experimental results have indicated that the proposed RdEA holds a competitive performance in solving both MaOPs with regular Pareto fronts and those with irregular fronts. Compared to the five popular MOEAs, MOEA/D, NSGA-III,
The work developed in this paper shows that the idea of using geometric information of Pareto fronts is a very promising approach to solve MaOPs with irregular fronts. Instead of introducing preference information to set some preferred optimization direction, the geometric information of the population is calculated from generation to generation, which can adaptively enhance the diversity maintaining ability of the proposed approach. In addition, experimental results on a real-world application, named car-worthiness design of vehicles, have verified the efficiency of the proposed RdEA on obtaining a set of uniformly distributed and well converged solutions, which offers a representative set of solutions for the decision makers. Future work on developing more effective region division approaches by taking use of the geometric information of Pareto fronts is highly desirable. It also deserves to be further investigated how to capture the exact geometric information of Pareto fronts, which could greatly improve the performance of the proposed algorithm for solving MaOPs with irregular fronts. Besides, the use of machine learning techniques [50, 51] can be adopted for calculating the curvature and boundary instead of the approximation calculation used in this paper, and parallel techniques can be used for improving the efficiency of the algorithm [52].
Footnotes
Here, the meaning of “uniformly” is as follows. If a point sequence ![]() ].
].
Acknowledgments
This work was supported by National Natural Science Foundation of China (61272152, 61320106005, 61502004, 61502001, and 61672033) and the Innovation Scientists and Technicians Troop Construction Projects of Henan Province (154200510012).