
Abstract
Membrane computing models are parallel and distributed natural computing models. These models are often referred to as P systems. This paper proposes a novel multi-behaviors co-ordination controller model using enzymatic numerical P systems for autonomous mobile robots navigation in unknown environments. An environment classifier is constructed to identify different environment patterns in the maze-like environment and the multi-behavior co-ordination controller is constructed to coordinate the behaviors of the robots in different environments. Eleven sensory prototypes of local environments are presented to design the environment classifier, which needs to memorize only rough information, for solving the problems of poor obstacle clearance and sensor noise. A switching control strategy and multi-behaviors coordinator are developed without detailed environmental knowledge and heavy computation burden, for avoiding the local minimum traps or oscillation problems and adapt to the unknown environments. Also, a serial behaviors control law is constructed on the basis of Lyapunov stability theory aiming at the specialized environment, for realizing stable navigation and avoiding actuator saturation. Moreover, both environment classifier and multi-behavior coordination controller are amenable to the addition of new environment models or new behaviors due to the modularity of the hierarchical architecture of P systems. The simulation of wheeled mobile robots shows the effectiveness of this approach.
Introduction
P systems (PS) are bio-inspired parallel distributed computing models [1, 2]. Many variants of P systems have been introduced, inspired by biological phenomena such as the functioning and inter-cellular communication of cells and neurons [3, 4]. The computing power and complexity aspects of these models have been studied extensively [5, 6, 7, 8, 9]. Moreover, membrane computing models with parallel distributive architecture and membrane creation, deletion and division operations can generate exponential workspace and these variants can solve computationally hard problems, i.e., the NP-complete, PSPACE-complete problems in polynomial time or even in linear time [5, 6, 10, 11].
In recent years the use of the membrane computing models to solve many real-life problems has also gained interest, especially to solve engineering problems [12]. Some variants such as spiking neural P systems [13, 14] have been used for fault diagnosis of the power systems [15, 16, 17] and image processing [18]. Spiking neural P systems are an important paradigm of Membrane Computing that combines spiking neural networks [19, 20, 21, 22, 23]. Also numerical P systems have been used in robotics [24, 25, 26] and tissue P systems have been used in image segmentation [27, 28]. Another important application of P Systems is to solve optimization problems [29]. Some important studies are in parameter optimization problems in manufacturing [30] and combinatorial optimization problems [16].
Among the many variants of P Systems, Numerical P Systems (NPS) [31] and Enzymatic Numerical P Systems (ENPS) [26] are amongst the most successful due to their high performance in robots’ control applications [32, 24, 25, 33, 34], especially for modular and complex tasks of Autonomous Mobile Robots (AMR), see also [35, 36, 37, 38, 39]. The success of NPS and ENPS in robotics is due to the inherent parallel and distributed nature of these P systems along with their powerful numerical computation power [40].
One of the most fundamental problems in robotics is to obtain a path for the robot from the starting point to the goal [41, 42]. When a robot moves in a complex and unknown environment, it faces many possibilities. To reach the goal by overcoming various difficulties is the main challenge. These problems can be solved by recognizing the environment patterns, planning a path, positioning and executing the navigation safely and efficiently [43, 44, 45, 46]. The concept of controllers based on numerical P systems was introduced in [24] and has been further discussed in [33] to design controllers of autonomous mobile robots using ENPS and to solve simple navigation tasks. This work investigates the navigation of the robots in more complex environments by means of controllers based on ENPS. We aim at studying ENPS controllers for autonomous robots which can identify multiple environment prototypes and coordinate the behaviors of the robots within them.
In this study, an environment classifier and a novel multi-behaviors control approach based on ENPS are proposed to enhance the reactive navigation performance of the AMR. The novelty of this approach is mainly in three aspects: (1) 11 prototypes of comprehensive topological maps describing the local environments are considered together to design the classifier for environment identification module; (2) A multi-behavior coordination membrane controller (MBCMC) is presented for behavior coordinator module; (3) A serial control algorithm is developed to guide AMR to avoid obstacle, tend to target and follow a wall, etc.
In order to reduce the error impact of sensor noise and poor obstacle clearance, the membrane classifier is designed based on the “binarized rough model” to produce the precisely desired environment pattern, which is used as the input of the behavior coordinator module. Behavior coordinator uses an enzymatic numerical P system to integrate specific behaviors by a well-thought out local path planning (i.e., path planning in an unknown or partially unknown environment) strategy, without large memory size and heavy computation burden. The specific behavior control algorithm is designed based on the Lyapunov stability theory to produce the precisely desired velocity. Furthermore, the effectiveness of the introduced control approach is verified by applying the simulated AMR.
The remainder of this article is organized as follows. Section 2 describes Multi-Behaviors Dynamic Selection Problems (MBDSP). In Section 3, we depict the proposed behavior based membrane controller in detail for solving MBDSP of AMR reactive navigation. Section 4 presents simulation results. Conclusions are drawn in Section 5.
MBDSP
The autonomous robots are capable of self-judgment and independent navigation in an unknown environment. We describe the AMR mechanical system, and MBDSP in the following sections.
AMR description and problem statement
In this study, the AMR mechanical system schematic graph, which is shown in Fig. 1a consists of two actuated wheels and a back unpowered universal wheel. The passive wheel does not affect the degree of freedom of the kinematic model, and can work with the nonholonomic constraints as follows:
AMR description and getting trapped in U-shape trip.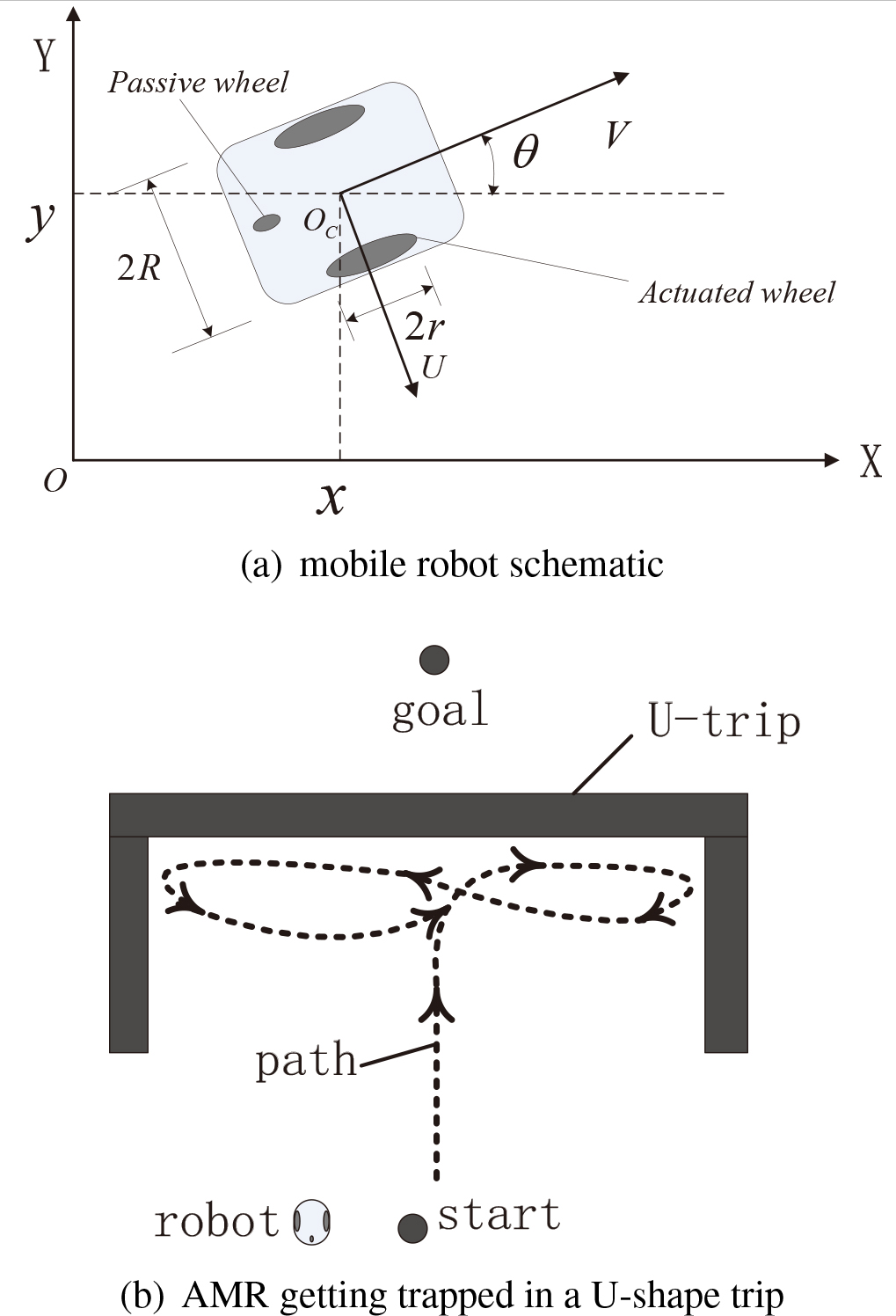
The posture of AMR in global coordinates frame
Now we discuss what MBDSP are. Let us imagine that a robot wants to reach some destination in an unknown environment. At first, the robot follows the planned path and will avoid if some obstacle is blocking the path. If the obstacle is very large, it may decide to walk along the periphery of the obstacle. So there can be many unknown situations in front of the robot and it must have the ability to handle the movements safely and effectively. Hence a group of distinct behavior modes is supposed to help the robot to co-ordinate at each time instant. This is the so-called Action Selection Problem in robotic reactive navigation [48], which we have referred to as the MBDSP. The reactive navigation is one of the most challenging problems in AMR. The behavior-based systems are proved to be very responsive to an unknown environment, and the performance of reactive navigation greatly relies on its behavior selection mechanism module. Moreover, there are several aspects about MBDSP which should be paid more attention to
Behavior control law model: Current controllers usually implement processing of sense-plan-action separately, and do not consider the unity kinematic control law model of different behaviors deliberately, while robots need to wander free not only in maze but also in outdoor and indoor unknown environment; Control architecture mode: Current action based architecture is not clear about designing an architecture which allows the dynamic switching among different types of behavior (such as reactive or reflective behavior) selection strategies; Multi-behaviors coordination mode: AMR can very easily fall into the local minima trap when reactive navigation has no prior knowledge of the complex environment as shown in Fig. 1b. It is also likely to be caused by the first two factors. But an excellent coordinator prevents from these faults. Hence, the dynamic switching strategy, subdivision of different types of behaviors and designing of the corresponding control law are introduced. Furthermore, the behaviors that are usually needed for AMR to wander free in an unknown environment (including outdoor, indoor and maze) are defined clearly in the following:
Environment classification; Path tracking; Goal reaching; Obstacle avoidance; Wall following; Corridor walking; Emergency U-turn; Self rotation;
The world’s first intelligent mobile robot Shakey [49] was developed at Stanford in 1960’s. Following these methods, more and more advanced modern control approaches have been proposed and successfully applied to AMR in industrial contexts [33]. These control approaches can be classified into the following categories according to different control theories:
Among the various local or reactive navigation methods, some problems continue to bother them, such as local minimum trap, complex scenarios, lack of prior knowledge, etc.
The well-known traditional APF [50] and its extended methods [57, 54, 45] are suitable for underlying on-line control in dynamic environments and low processing needs, but it has a problem of local minima [45], which needs to resort global knowledge of the environment at a higher layer. The Bug family methods [58, 56] are inspired by bug’s behavior on crawling along the obstacle. These approaches are well known for local navigation with minimum sensor, and also for shorter timing, shorter path planning, a simpler algorithm and better performance. But the performance of these approaches depends on the shape of the obstacles in the environment and need some global visual information. Moreover, the Bug family algorithm usually ignores robotic’s practical setting (e.g., for kinematic or dynamic constraints). FLC is indeed one of the most fundamental methods and widely used to coordinate numerous basic tasks involved in path planning of behavior-based robots. Many FLC approaches with other complementary techniques were developed to solve some of mobile robot navigation problems in obstacle avoidance [54, 59], path tracking [60] and behavior coordination [61, 62]. Although FLC rules offer possible implementations of human knowledge and experience which do not require a precise analytical model of the environment, they cannot obtain the optimal solution and mostly fail while dealing with trap situations and complex scenarios [63].
AMR behavior based reactive navigation usually involves many aspects such as environment identification, control structure, dynamic behavior selection strategies, robot physical setting, etc. The study of MBDSP [63, 64, 65, 66, 47] usually emphasizes on one or two aspects and the other properties are simplified or ignored.
In this study, most of them are carefully considered to obtain the desired behaviors of the corresponding environment models and reduce the influence of the local minimum traps of complex unknown environments. Unlike APF and bug family methods [58, 57, 45], which do not care about the robotic physical characteristics completely. But in this paper, the kinematic behaviors are considered to be designed by Lyapunov theory in accordance to robotic characteristics which are suitable for indoor and outdoor environments. Design of the specialized behaviors control law is beneficial for multi behaviors co-ordination. This study also uses an ENPS to improve the parallel computation performance of the environment classifier and behavior coordinator. Thus, the computations are flexible and are in accordance with reactive navigation. For analogy, some studies emphasising the advantages models of parallelisation are reported in [67, 68, 69].
ENPS
ENPS are naturally distributed and parallel computing models, in which numerical variables store information. Also a set of evolving rules in each membrane region can iterate simultaneously according to the activation conditions, and transmit information between the nodes (membranes). A standard ENPS is as follows [26]:
where
Enzymatic form: the
Non-enzymatic form, which is just like the standard NPS:
A membrane with an enzyme variable.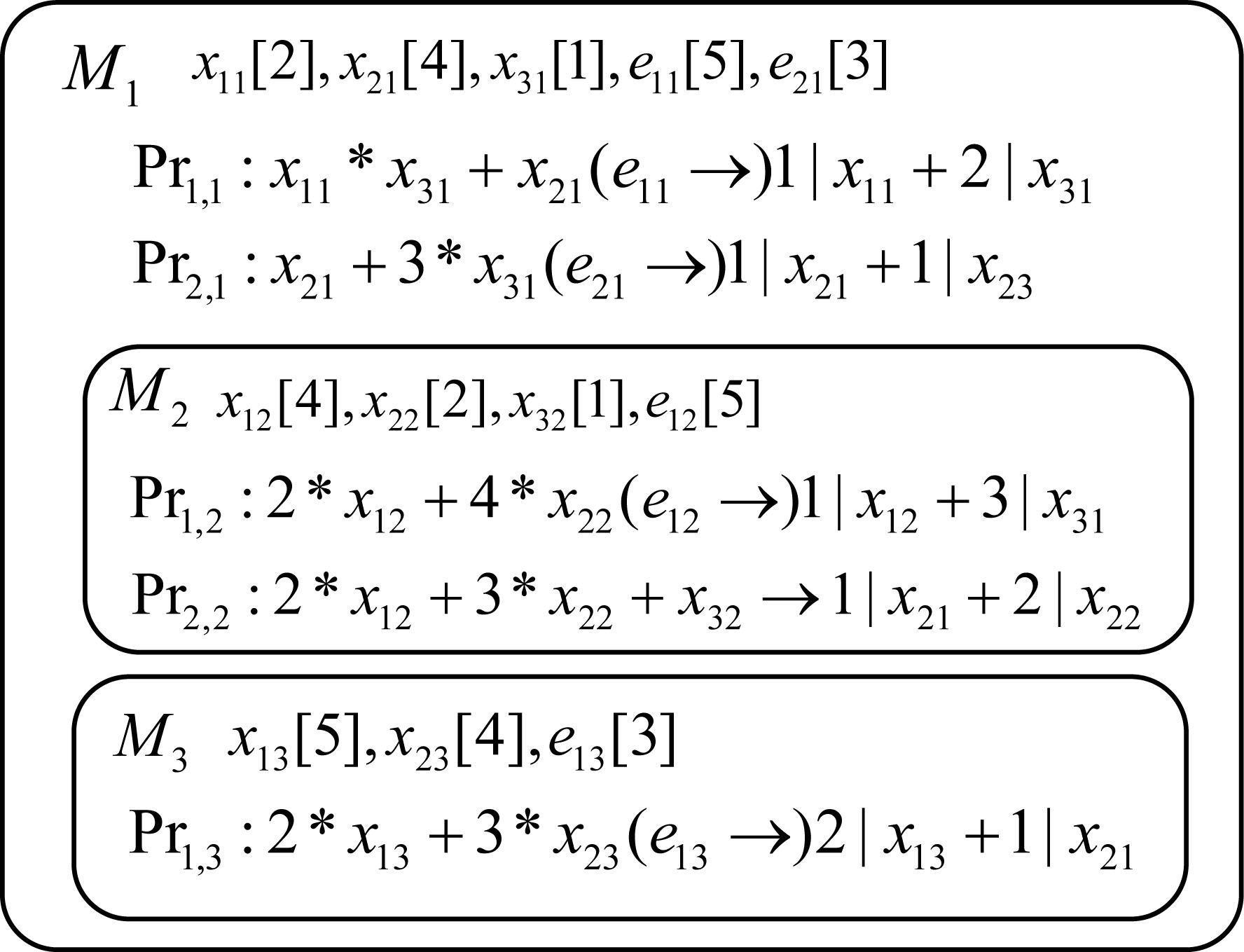
Inspired by the catalyzing reactions of the biological enzymes, the enzymatic action in ENPS model is to select the valid rules. Here we illustrate how the ENPS works in Fig. 2, where there are four variables
ENPS have flexible computing feature. Because of the hierarchical membrane structure with multiple rules in one region characteristics, enzyme variables can be used for conditional transmembrane transport and decide on the rules of evolution direction. The active rules are performed simultaneously inside their membranes, but unnecessary rules are not carried out and the results are distributed in globally uniform way. The computing power of the ENPS, and efficiency of the membrane structure representation for designing robotic behaviors have been investigated in [26, 24], respectively.
Design of environment classifier
In order to respond according to the appropriate behavior, AMR should know the relationship between its current status and the local environment at first. The output of the environment prototype will work as the features of the essential environment for navigation, and need not store or deal with unnecessary details.
Local environment prototype
Based on our understanding of the outdoor or indoor navigation, there are ten cases [55] for a robot, such as: following a left-side wall, wandering in open area, crossing a corridor or meeting a right-side obstacle, etc. Figure 3 lists these ten cases. At the first row of Fig. 3 five following cases have been shown: Left wall (LW), Right wall (RW), Hallway wall (HW), Left corner wall (LC) and Right corner wall (RC). The five cases of meeting an obstacle are defined at the second row of Fig. 3, i.e., Front wall (FW), Left side (LS), Right side (RS), Two side (TS) and Dead end (DE).
Ten prototypes/cases of local environment robots may meet.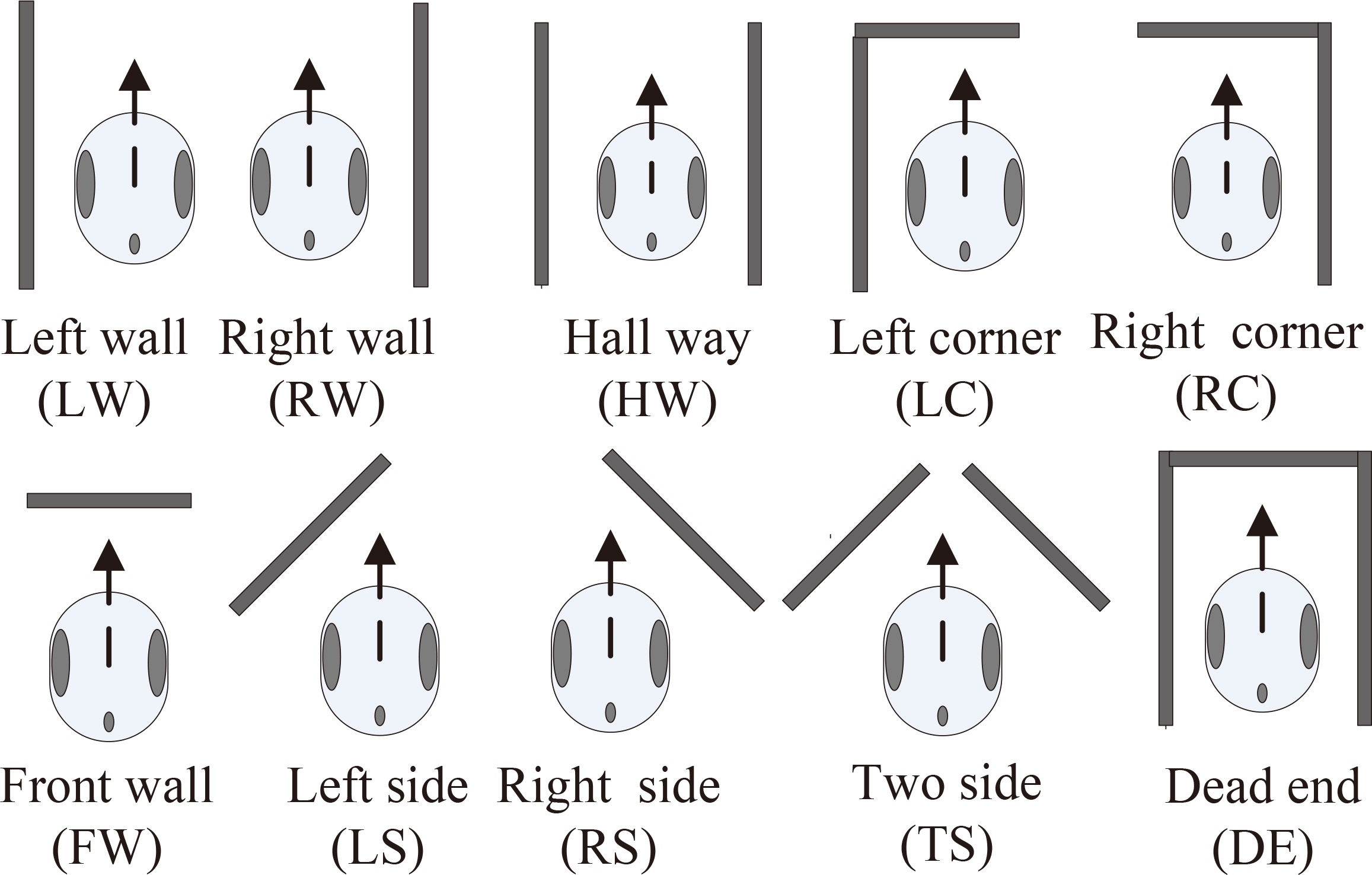
IR sensors placement for the e-puck. (a) e-puck sensors (top view); (b) obstacle meeting and sensor group.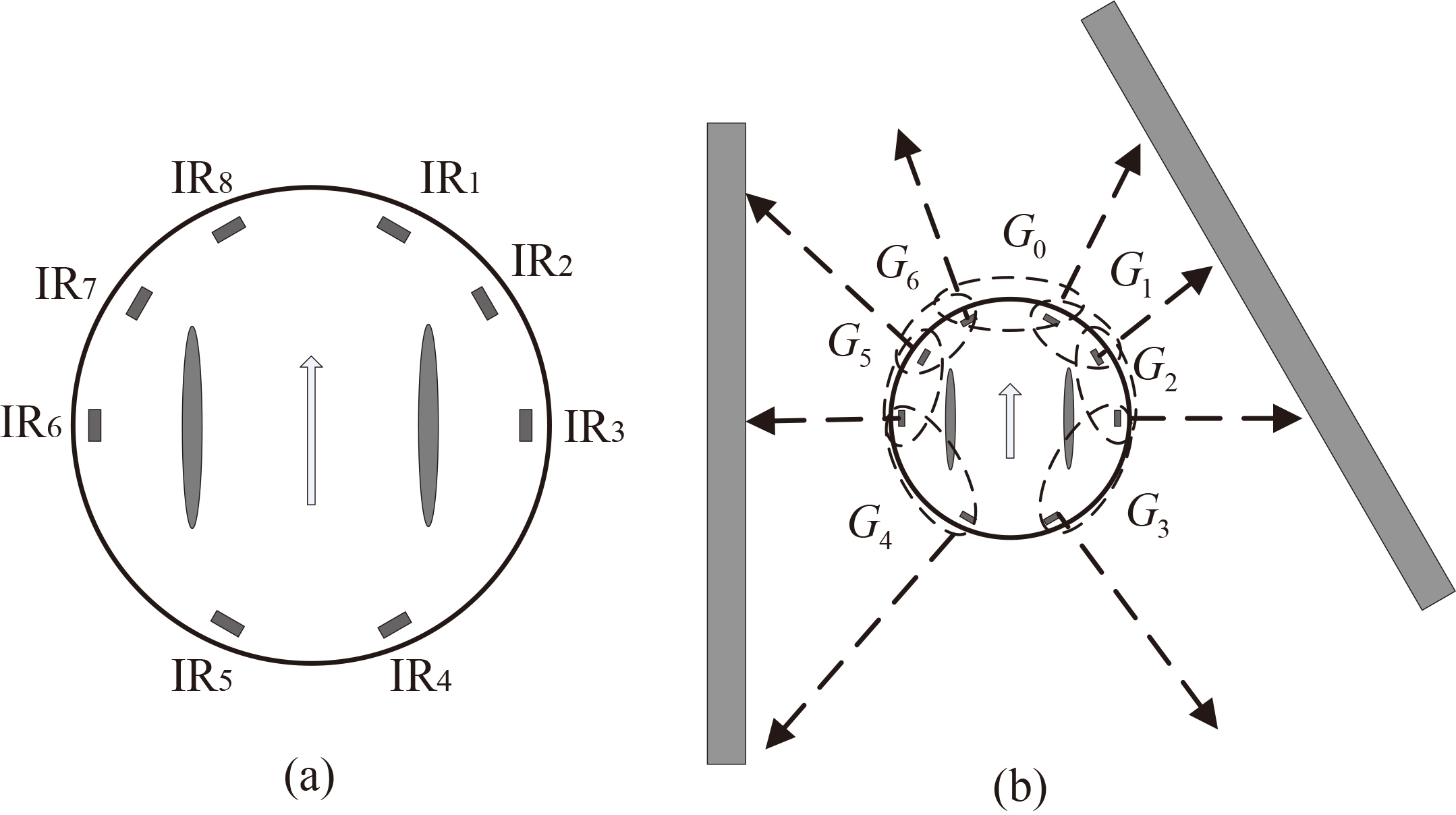
Before classification of the various local environments by sensor, the robot’s sensor feature must be defined. In order to reduce the cost of a sensor device, e-puck has only eight 8 Infra-red (IR) distance sensor around the body in Fig. 4a. The Fig. 4b shows the sensors
Sensory patterns for 11 cases.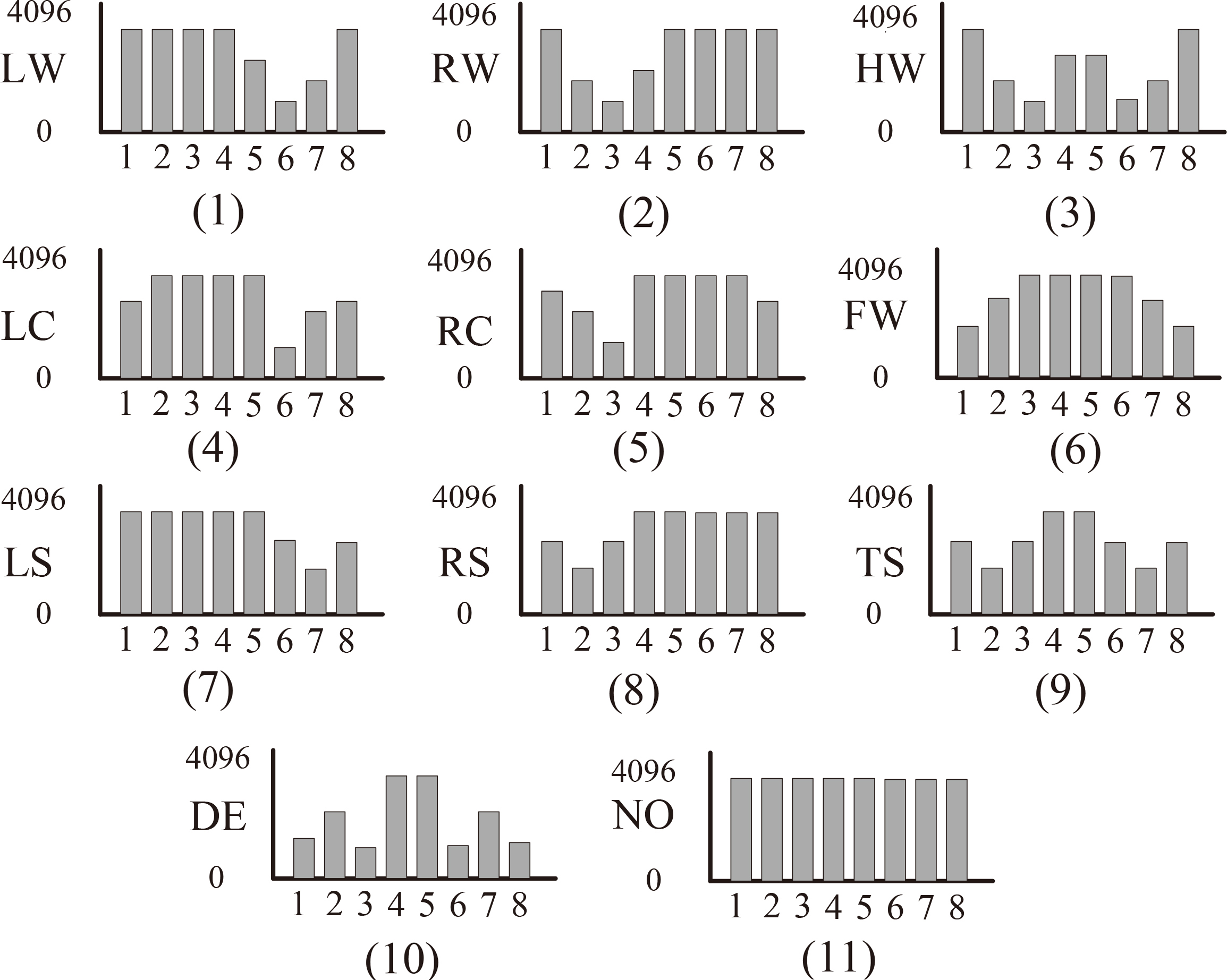
Membrane classifier for 11 environment patterns.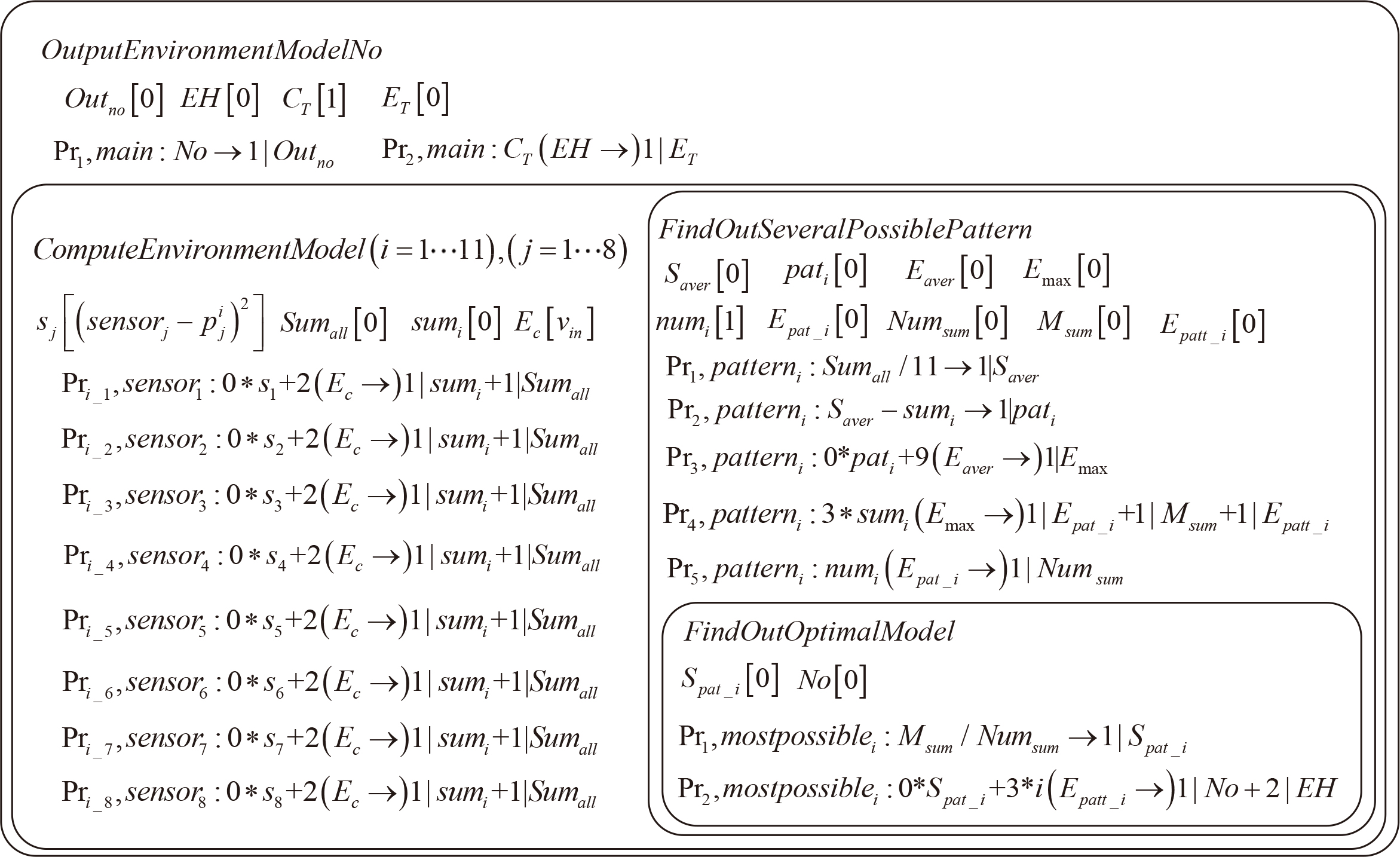
In this paper, we propose a local environment classifier based on ENPS to quickly identify the sensory patterns when AMR is surrounded by obstacles. Fast and accurate environment classification is beneficial for the response to the appropriate behavior.
As shown in Fig. 6, the environment classifier is designed by using a membrane system with a hierarchical membrane structure containing four membranes. The inner membrane Compute Environment Model is used to match the 11 case environment model. According to the sensor data, it has 11 variables, where
The
Rule
Again,
The inner membrane Find Out Several Possible Pattern is designed to find out several more likely patterns with nine variables, where
The variable The Enzyme
The execution of this rule means, this sensory pattern is a matching environment prototype and the next rules are applicable. The Enzyme
The innermost membrane Find Out Optimal Model has two variables. The average variable
Dynamic multi-behavior coordination
In order to explore complex and unknown environments, AMR not only needs to be promptly reactive, it also must act safely and smoothly. Moreover, AMR can break away from local minima trap and arrive at the goal finally. This section describes how to co-ordinate with these behaviors by dynamic selection mechanism. It should be noted that the control law design for all behaviors in this article is described in detail in Appendix.
Flow chart of multi behavior coordination controller.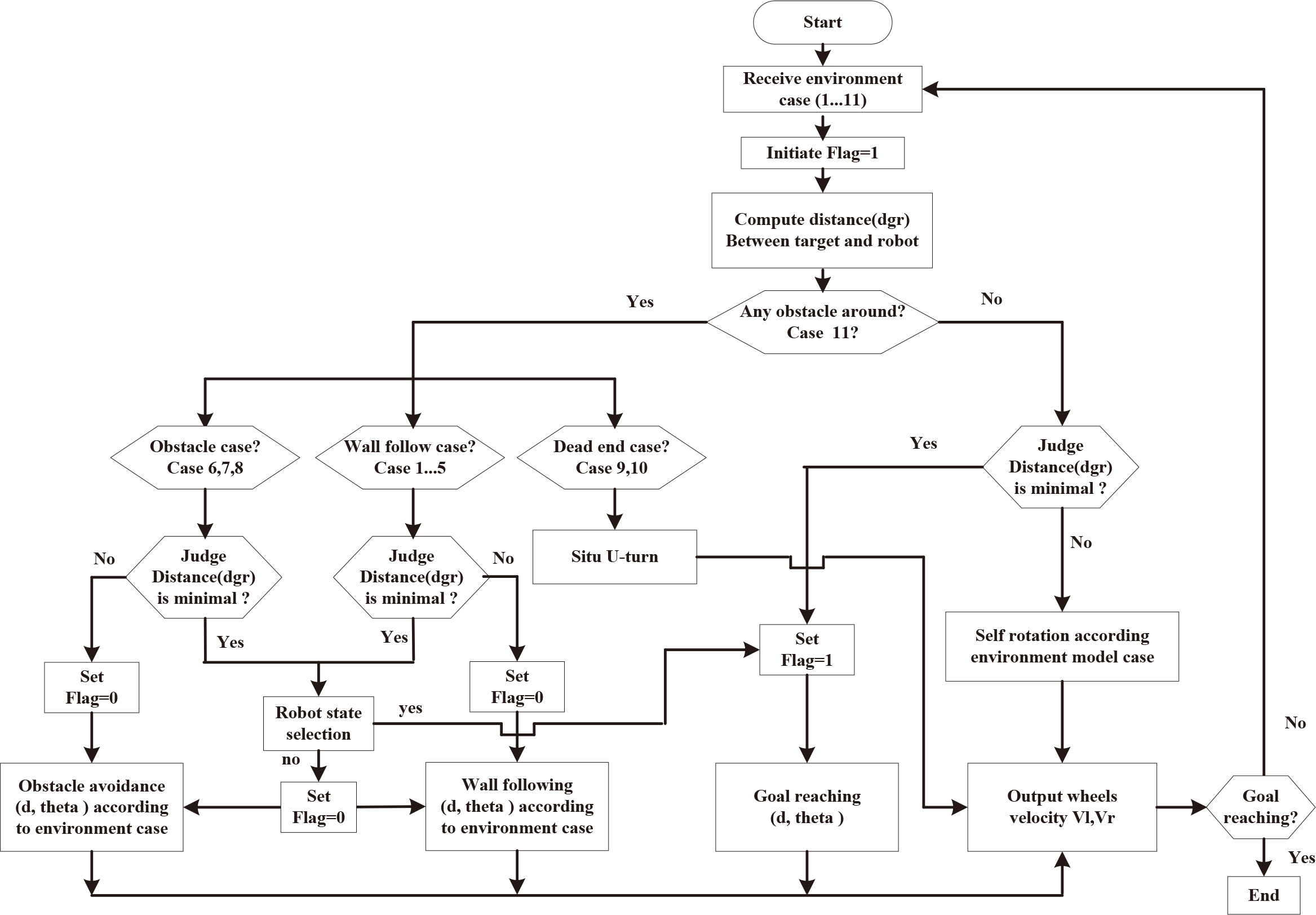
The proposed flow chart of dynamic multi-behavior selection is depicted in Fig. 7. In Fig. 7,
The “obstacles” can be grouped as
Obstacle cases, i.e., FW, LS, RS, Wall follow cases, i.e., LW, RW, HW, LC, RC (corridor walking also classified as this case), The dead end cases, i.e., TS, DE.
AMR might fall into the trap while avoiding the obstacle or following the wall. In order to resolve the local minimum problem, AMR must solve the problems such as positional relationship among goal, obstacle, wall and robot. Also must investigate whether the distance
In this work, an interesting dynamic multi-behavior selection strategy is constructed to speed up the behavior coordination by parallel processing. Moreover, the corresponding co-ordination controller based on P system is shown in Fig. 8.
MBCMC design
Dynamic multi-behavior coordination membrane controller.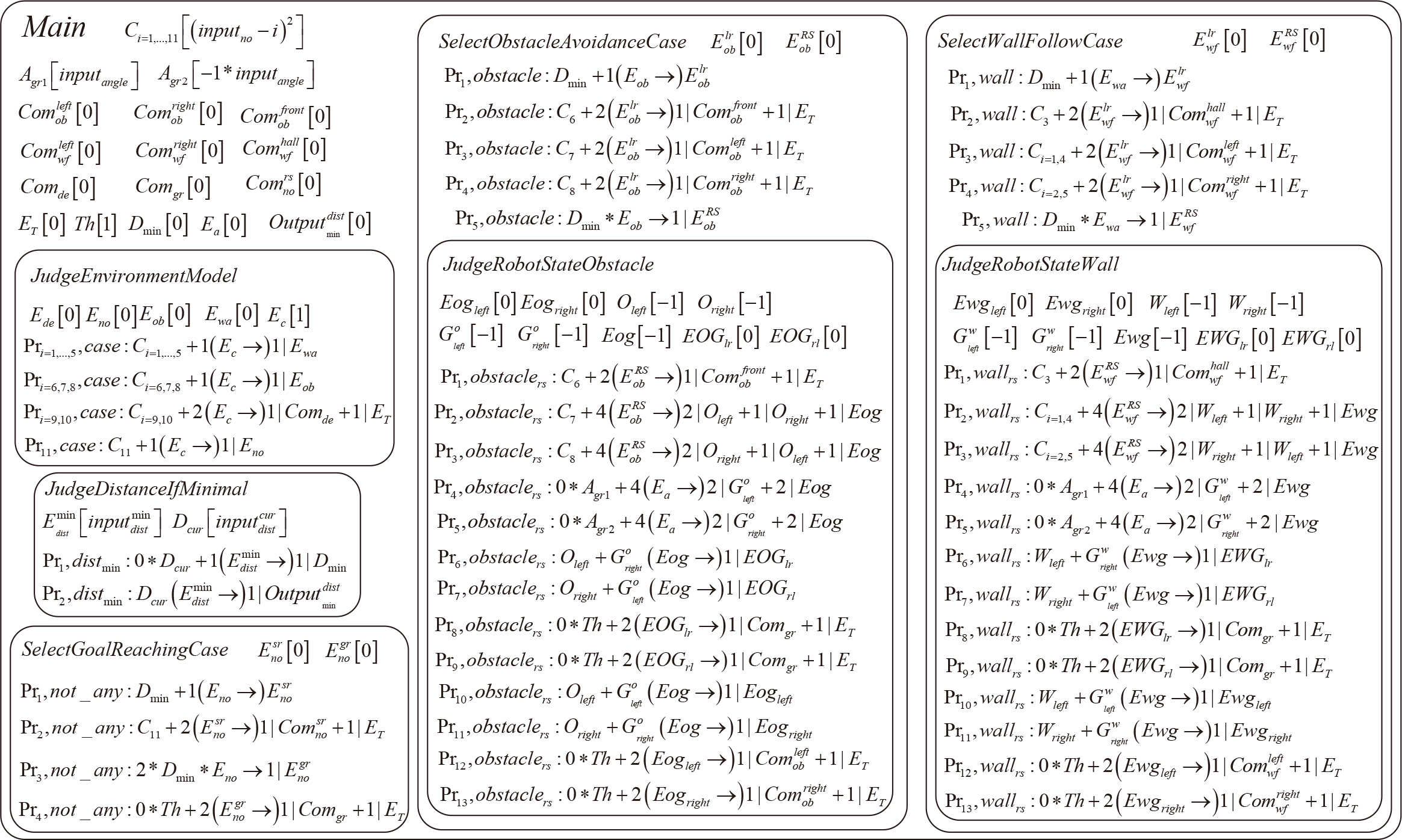
MBCMC is shown in Fig. 8. It is designed by using a P system with a hierarchical membrane structure containing eight membranes. The skin membrane Main has 27 variables.
The variable All of the output variables have the initial value 0, but when some of the behavior gets triggered, then the corresponding variable value is set to 1. The variable The enzyme variable The
The inner membrane Judge Environment Model has five enzyme variables, where
Enzyme
The inner membrane Judge Distance If Minimal has two variables.
The enzyme The variable
Both of these variables decide whether the rules
The inner membrane Select Goal Reaching Case has two enzyme variables, i.e.,
Rule
The inner membrane Select Obstacle Avoidance Case has two enzyme variables
Rule
Judge Robot State Obstacle has 5 enzyme variables and 4 common variables.
Enzymes The common variables
The rule
The AMR should compute the obstacle avoidance at once and without any further analysis. Rule
Enzyme Eog can obtain contribution from rules
If rule
The operating mechanism of inner membrane Select Wall Follow Case and its sub membrane Judge Robot State Wall for wall following are similar to obstacle avoidance. To restrict the length of the paper, we do not expand the description further.
In this section, the performance of the proposed environment model classifier and dynamic multi-behavior co-ordination controller is verified based on the Matlab simulation. Furthermore, the simulation under Webots (robot simulation software) environment is used to test the performance of mobile robot navigations in different environment models. All the simulations are conducted on the PC with CPU 2.8 GHz, 4 GB RAM, and the software platform MATLAB 7.4 and Windows 7 OS. e-puck robot has 8-infrared sensors and Max IR value is 4096. The size of the robot is 70 mm in diameter and 55 mm in height with 2 stepper motors.
Performance metrics
A good selection of the metrics is very important for the control performance. The autonomous robot should reach to the target safely and smoothly in minimum time with the shortest distance. In this section we will introduce some metrics that evaluate the performance of robot motion methods.
Time to reach the goal: Path length:
Minimum distance overruns:
Mean distance to obstacles: Number of collisions: Mission failures: Number of oscillation:
Since the navigation environment is usually unpredictable, complex and partially unknown, a single environment model membrane classifier can hardly take charge of the whole task. If a Single Membrane Classifier (SMC) is used, it must have a complex structure with many internal parameters to solve the problems of navigation in complex environment. Therefore, a Multi-Membrane Classifier (MMC) (in this paper, two or three) has been employed to identify the environment model with good fault-tolerance capabilities. Since the MMC uses the SMC modules (each covering a specific local environment), it can quickly and easily find good local solutions.
The simulations on e-puck robot with 8 infra-red sensors around have been shown in Fig. 4a. In order to reduce the impact of sensor noise, the sensor’s value is filtered with a given threshold before being sent to the membrane classifier. All values smaller than 70 are ignored. At the same time, in order to simplify the environmental identification model, once the value of some sensor is greater than 70 (close to the obstacle), it activates this channel and is set to 1. Otherwise, is set to 0.
Performance comparisons between SMC and MMC while escape from local minimum
Performance comparisons between SMC and MMC while escape from local minimum
Performance comparison of MBCMC and NN [55] under the same obstacle distribution
Using aforementioned informations, three kinds of SMC can be constructed in the following manner:
Binary encoding of 
Note that row
Escape from a local minimum in a complex environment.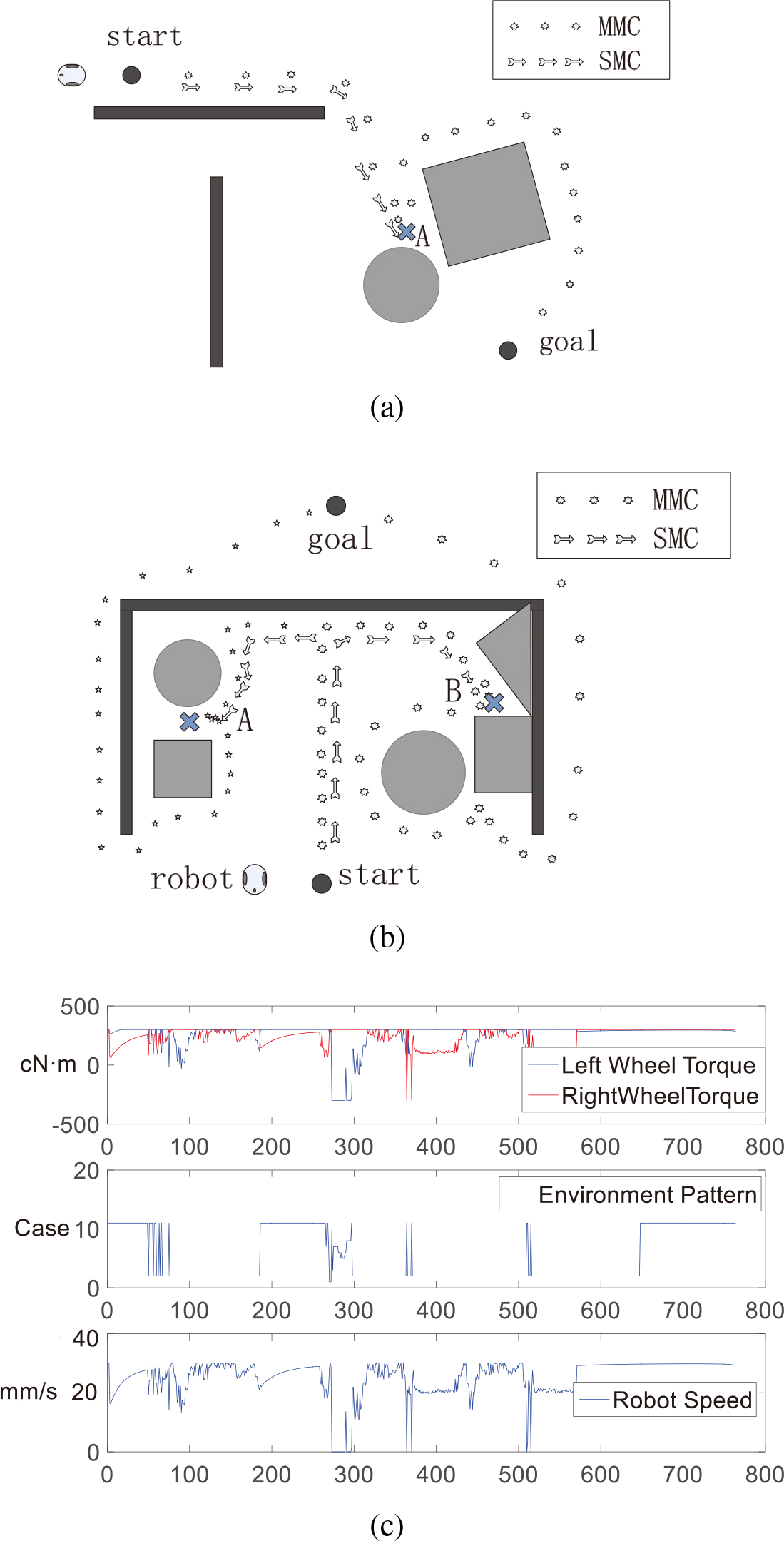
There are several local minimum traps in Fig. 10a and b. MMC can break away from both of the local minimum trap and arrive at the destination successfully as in Fig. 10a and b. But SMC can not struggle to break away from the local minimum trap (A) point in Fig. 10a, and sometimes can not break away from the local minimum trap (A) or (B) in Fig. 10b. SMC alternately judge the environment patterns by switching from case 2 to 7 constantly while reaching the edge of the trap. The environment pattern changes to case 3 (Hall way) while reaching the bottom of the neck trap. But if the robot size is bigger than the spacing of the hall way, it will fall into the trap and the robot speed will become zero while the left and right wheel are still running. But MMC can move away from the trap successfully because MMC judges this pattern as 9 cases and would activate U-turn behavior to break away from the trap. Figure 10c shows the operation-related parameters of the robot when it gets out of the local minimum trap in Fig. 10b and reaches the target, where left wheel torque and right wheel torque are the left and right wheel driving torques of the differential robot.
Under the same obstacle configuration as in Fig. 10, we have changed the start and goal positions and ran the simulation ten times. For the same navigation task, Table 1 is listed in the performance of SMC and MMC. The
MBCMC (a)–(c) and NN [55] (d)–(f) trajectories in unstructured environment.
Several behavior coordination schemes are employed to evaluate the performance, such as fuzzy logic approach [66], expert fuzzy cognitive map (FCM)-based approach [63], fuzzy discrete event systems FDES-based approach [61], optimized modular NN approach [55]. Throughout the simulations, we have adopted modular
Test I: Unstructured environment: Figure 11 shows navigation of different trajectories by the proposed MBCMC and NN controller [55]. In the environment of Fig. 11, multiple obstacles of different shapes and sizes are randomly distributed, and set up three different groups in an unstructured environment with the same obstacle layout. Contrast experiments between the starting point and the target point are shown in Fig. 11a–f. Considering the randomness of the autonomous robots in exploring the unknown external environment, under the same starting point and target point conditions, the autonomous robot performs computer simulations of ten navigation respectively, and the average of each performance metrics in ten experiments is used as the navigation performance. Table 2 shows the comparison results of the performance metrics of the three groups of experiments. It can be seen that the MBCMC method has better performance than the NN approach. MBCMC has a smooth trajectory, less time overhead, and fewer oscillations.
Test II: G-shape and snail shape environment: Figure 12 shows the expected results as previously depicted in MBCMC. In [66], a new fuzzy logic controller for robot navigation has been developed, which has adopted an actual-virtual target to escape from the local minimum by defining a sum of turning angles.
If the sum of turning angles throughout the way is near
If the total amount of turning angles is negative, then the robot will have a counterclockwise motion to compensate the amount at the opening point.
Since the sum of turning angles is
Escape from a G-shape and snail shape environment.
Robot starts at room 1 and goes to room 2.
Performance comparison for the three test environments
Unstructured environment.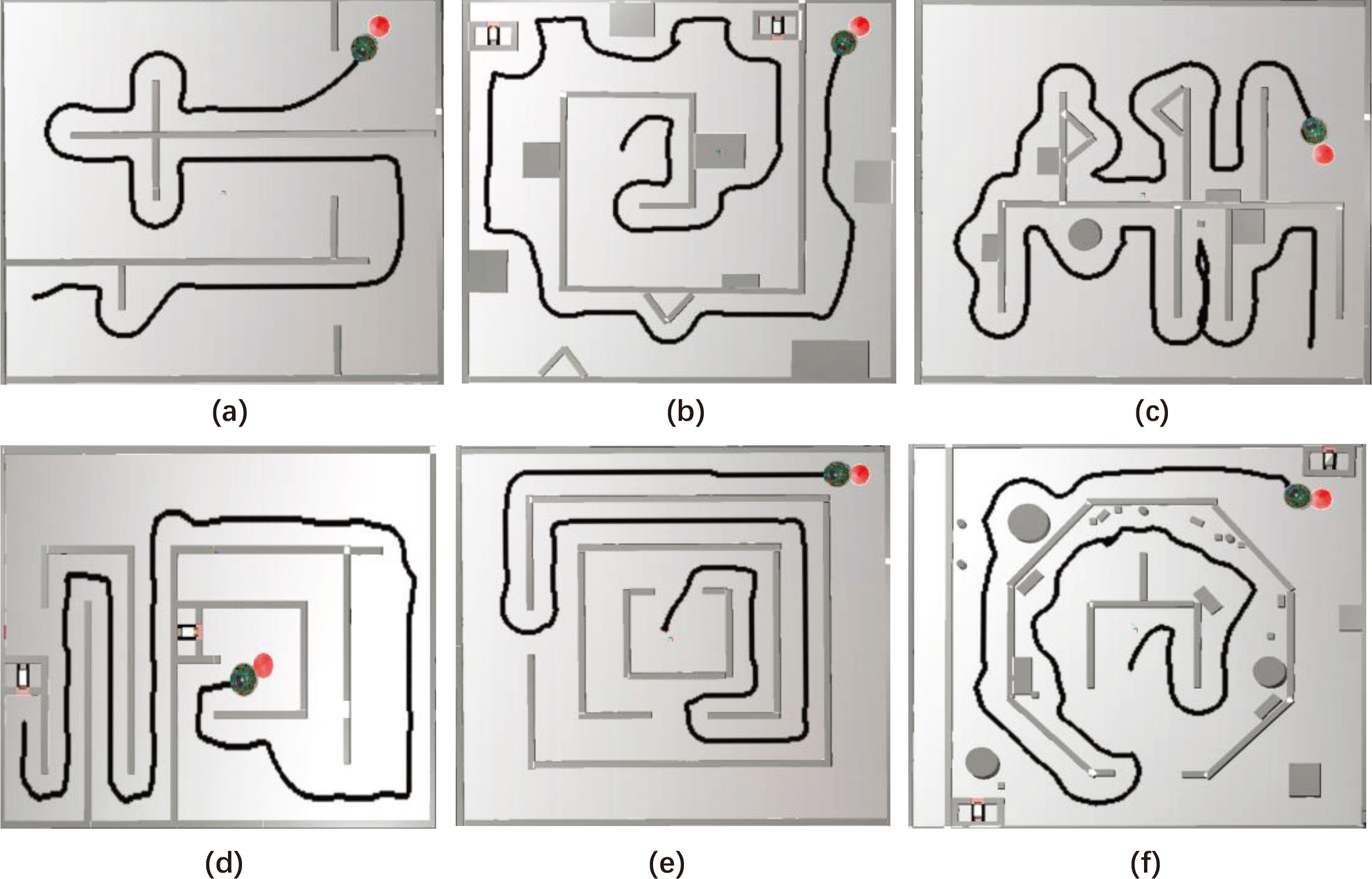
Escape from a maze environment.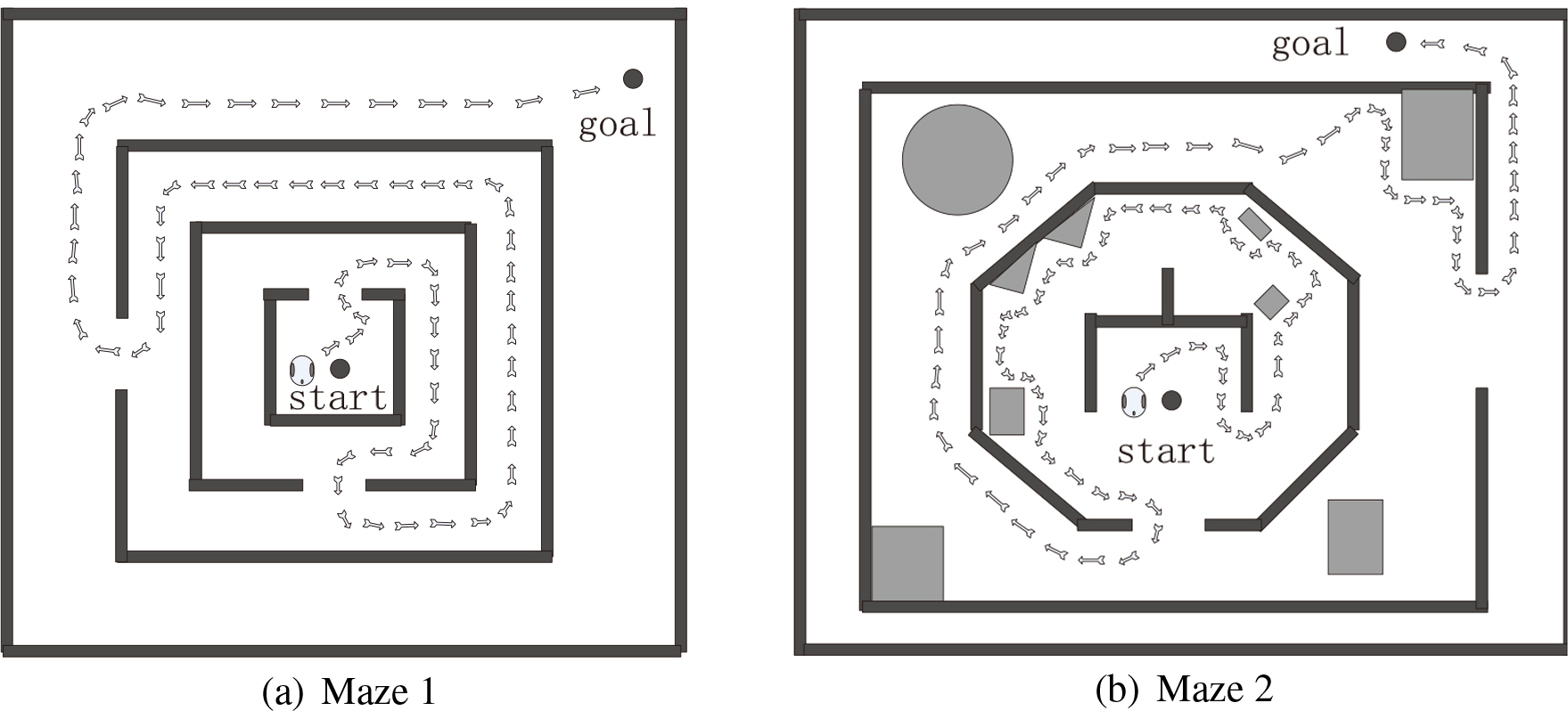
Snail shape in Fig. 12b is more complicated trap than G-shape. The distance between the corridors of the snail must be wide enough. The robot in [66] after encountering the first wall (left side or right side), follow the left side or right side wall and then break away from the snail shape obstacle successfully. But the snail shape environment in this paper has a very narrow corridor and with a dead end. Hence, it will effect the definition of the virtual target [66] and event weights of the expert-FCM graph [63]. Also, the robot falls into a trap at dead ends “(A)” as shown in Fig. 12b. Since hall way and dead end are in the general definition of environment patterns and MBCMC can identify those cases in this paper. Moreover, the wall following method is also modified by Eq. (A27) to a suitable corridor environment. The results of Fig. 12b prove that the robustness of the proposed approach is better than the approaches in [66, 63], whether it is a wide corridor or narrow corridor.
Test III: Building environment: The robot starts in room 1 and navigates to the goal at room 2. Figure 13 shows that both MBCMC and M-NN [55] started at room 1, crossed the narrow corridor and arrived at the turning point “(A)”. MBCMC can implement self-rotation strategy according to the environment model and aim the room 2 as the goal. But the robot (M-NN [55]) failed to enter through the “door" at (A), because it was confused by the corridor module and the left turn module (adopt the competitive coordination). The robot [55] can break away the dead end “(B)” in Fig. 13, but it spends more time to reach the goal than the proposed approach.
Control results of MBCMC related to mazelike environment in Fig. 15.
Test IV: Maze environment: The performance of MBCMC was examined in the similar environ- ments [61] with more complex mazelike traps in Fig. 15. Figure 15b shows the similar navigation scenarios of the robot moving in the maze environment with irregular obstacles. FDES-based approach [61] employs supervisory control theory of fuzzy discrete event systems to model and control several navigation task of a mobile robot. Two deliberative behaviors (“Go to Target” (GT) and “Route Follow” (RF)) and three reactive behaviors (“Wall Follow” (WF), “Avoid Obstacle” (AO) and “Avoid Dead ends” (AD)) are weighted through FDES and navigate the robot to the final target successfully. In this method, target seeking is based on following a series of immediate sub-targets (waypoint). GT is used for path optimization and aims to find the next nearest waypoint. RF is used to navigate the robot through way points. Therefore the robot can trace a collision-free path with optimum distance towards the actual target in maze-like environments. Unlike in [61], the start and end points are identified and moreover the waypoints are given manually. The robot in this paper only knowns the start point and goal point and also can identify the surrounding unknown environments by MMC accurately. The dynamically chosen reasonable behaviors by MBCMC, the AMR can help to walk out of the maze safely. Figure 15 shows the traveled trajectory with these environments, where both MBCMC and FDES-based approach have the similar path. Also, Fig. 16 depicts the Yaw angle between robot direction and goal, environment pattern, left and right wheel driving torque and robot speed results of MBCMC related to the complex maze-like environment in Fig. 15.
Figure 14 depicts autonomous robot’s trajectory in different structured/unstructured maze environments using the proposed MBCMC approach. These different types of maze environments have many different types of local minimum traps. But the robot does not fall into the traps and the trajectory is smoother while maintaining a certain safety distance from obstacles. It shows that MBCMC can well adapt to navigation tasks in different complex environments and find an optimal path to the goal. Table 3 depicts the performance evaluation of the proposed MBCMC with the existing approach in different kinds of environment. Moreover the trajectory is smoother and safer than other methods, the oscillation times of MBCMC is also the smallest. This is due to both the behavior selection strategy and computational efficiency of the membrane controller, as well as the detailed design of each behavior.
In this paper, a simple and effective environment pattern membrane classifier is constructed based on parallel distributive computing models known an ENPS. It can be identified by eleven environment patterns and can build or modify environment modules quickly. It is observed that the proposed MMC and MBCMC are able to provide a robust and successful navigation with a smooth path in different type of environments. The proposed bio-inspired controllers are validated on simulated mobile robots and comparison with neural network controller and fuzzy logic controller has been provided. The proposed approach eases the design of the behavior-based hybrid control architectures with the higher modularity which is obtained by associating P systems. Moreover, MMC with binary environment model is able to cope with sensor imprecision and ambiguous situations.
Also, introduction of more behaviors to the membrane hybrid control architecture is easily performed by adding more environment models to MMC and events to MBCMC. To address the more complex navigation tasks, studies on decentralized and modular membrane controller can be carried out in the future.
Footnotes
Acknowledgments
The work is supported by the National Natural Science Foundation of China (61972324, 61672437, 61702428, 61771411), by Beijing Advanced Innovation Center for Intelligent Robots and Systems (2019IRS14), Sichuan Science and Technology Program (2018GZ0086, 2018GZ0185), New Generation Artificial Intelligence Science and Technology Major Project of Sichuan Province (2018GZDZX0043) and Artificial Intelligence Key Laboratory of Sichuan Province (2019RYJ06).