
Abstract
A hydrodynamic thrust bearing could be forced to operate in mixed lubrication regime under various circumstances. At this state, the tribological characteristics of the bearing could be affected significantly and the developed phenomena would have a severe impact on the performance of the mechanism. Until recently, researchers were modeling the hydrodynamic lubrication problem of the thrust bearings either with analytical or with numerical solutions. The analytical solutions are very simple and do not provide enough accuracy in describing the actual problem. To add to that, following only computational methodologies, can lead to time consuming and complex algorithms that need to be repeated every time the operating conditions change, in order to draw safe conclusions. Recent technological advances, especially on the field of computer science, have provided tools that enhance and accelerate the modeling of thrust bearings’ operation. The aim of this study is to examine the application of Artificial Neural Networks as Machine Learning models, that are trained to predict the coefficient of friction for lubricated pad thrust bearings in mixed lubrication regime. The hydrodynamic analysis of the thrust bearing is performed by solving the Average 2-D Reynolds equation numerically. In order to describe the roughness of the profiles, both the flow factors suggested by N. Patir and H.S. Cheng (1978) and the model of J.A. Greenwood and J. H. Tripp (1970) are taken into consideration. Three lubricants, the SAE 0W30, the SAE 10W40 and the SAE 10W60, are tested and compared for a variety of operating velocities and applied coatings. The numerical analysis results are used as training datasets for the machine learning algorithms. Four different ML methods are applied in this investigation: Artificial Neural Networks (ANNs), Multi- Variable Quadratic Polynomial Regression, Quadratic SVM and Regression Trees. The coefficient of determination,
Introduction
Thrust bearings are machine elements that were designed to carry the axial loads developed in rotating machinery. The lubricant that is dragged inside the tribo-conjunction due to the relative motion of the rotor and the pad, along with the wedge, between the two friction surfaces, constitute the basic principle of operation of such mechanisms. The design of thrust bearings has become demanding through time due to the environmental and economic limitations that call for cost efficient applications with compact sizes. The ability of these bearings to support axial loads in many operating conditions has turned them into crucial machine elements in industry, marine, aerospace and automotive fields. For example, Kalsi et al. [1] investigated a load-responsive hydrodynamic thrust bearing able to operate in higher load and speed than standard bearings, especially for downhole drilling tools. Furthermore, Lingwall et al. [2] investigated the application and qualification of PCD thrust bearings in the extreme conditions of marine hydrokinetic machines. To add to that, Sun et al. [3] investigated the application of rubber-supported thrust bearings in marine thrusters in a way to overcome the wear that appears in some of the pads when the load is not evenly distributed.
There are cases in which the bearings are forced to operate efficiently under extreme conditions which may lead to mixed or even boundary lubrication. Such cases must be understood, analyzed and included in the final bearings’ design, because the impact of the forces developed under these operating conditions may affect significantly the final performance of the bearing as well as the corresponding mechanism. To add to that, investigators have applied a variety of methods to enhance thrust bearings’ performance, focusing on their surface profiles, dimples, and textures as well as coatings [8, 9, 10, 11, 12, 13, 14, 15]. To begin with, Etsion et al. [4] worked on the improvement of thrust bearing’s performance by applying laser-surface texturing. Moreover, Knuteson et al. [5] investigated the wear-in behavior of PCD coatings on thrust bearings. In addition, Qi et al. [6] presented research results on the tribological behaviors of annular rings with spiral grooves. Finally, Zhang et al. [7] performed a numerical analysis and an experimental research on the load carrying capacity of water-lubricated tilting-pad thrust bearings.
From the early investigations it was clear that friction played an important role on the characteristics of the lubricated contacts and the operational regime of the corresponding mechanism. Three main lubrication regimes derive from the fraction of the film thickness and the average surface roughness: the hydrodynamic, the mixed and the boundary lubrication regime. Standard designs of thrust bearings, provide operation under hydrodynamic lubrication, where the roughness heights of the pads and the rotor are insignificant in comparison to the minimum film thickness; thus, there can be no contact amongst them. In this case only hydrodynamic conditions and loads affect the performance of the bearing. When the roughness of the mechanism is high enough, or when the lubricant’s thickness reduces at a level that a contact between asperities is possible, the thrust bearing may operate under mixed lubrication.
It is a fact that some thrust bearings are forced, or even designed, to operate under mixed lubrication. Extreme conditions of operation like very low sliding velocity or high external loads may lead to the appearance of contact areas between the asperities of the two friction surfaces. To add to that, transition faces like startup and shutdown, or sudden deviations from normal operation, may also cause periodic operation of the thrust bearing within mixed lubrication regime. During the years, many researches have approached the investigation of the mixed lubrication regime in thrust bearings’ operation both experimentally and analytically. First of all, Wang et al. [8] presented a study on water lubricated silicon carbide thrust bearings that were designed to operate between hydrodynamic and mixed lubrication regime, with a surface texture. The selected texture included micro-pits, distributed in a square area. The results showed that the bearing was able to carry almost double the load when the proper design of micro-pits was applied compared to the un-textured surface. Furthermore, Etsion [4] performed a theoretical and experimental study on the use of Laser Surface Texturing (LST) for various machine elements. LST was used in order to create micro-dimples on the components. The results showed that the micro-dimples assist the bearing’s operation, on the one hand, as micro-hydrodynamic bearings when the operation was within full hydrodynamic or mixed lubrication regime, or as a micro-reservoir, when starvation occurred, leading to substantial reduction of friction in comparison to the non-textured components. Moreover, Illner et al. [9] built a simulation program for a thrust bearing operating in a diesel injection pump. The algorithm was based on the numerical solution of the Reynolds equation for unsteady load, velocity and movement conditions. These conditions, combined to the low viscosity of the fuel, forced the bearing to operate under mixed lubrication with high solid body contact pressures. They concluded that convex slide faces do not produce significant improvements; however, they cause deterioration of the operating behavior. Finally, Henry et al. [10] investigated the behavior of many kinds of fixed-geometry thrust bearings in start-up condition and mixed lubrication. The study showed that there can be a texture design, appropriate to create a lubrication film that gives the bearing the ability to lift up during start-up. The results showed that the effect of squeezing was higher in start-up process than in shutdown. All in all, it can be seen that, various investigations have been performed focusing on improving the performance of thrust bearings in mixed lubrication regime by applying different surface profiles, textures, lubricants and coatings.
Current advances in computer science have led to improvements and applications in all engineering fields. For instance, Rodriguez-Galiano et al. [11] compared various machine learning algorithms in order to identify the optimum predictive model for mineral prospectivity. Furthermore, Fernandes et al. [12] investigated intelligent home management systems that perform power management, based on the user’s behavior in nearly real-time. Moreover, Li et al. [13] presented a case study regarding unmanned aerial vehicles landing on unmanned surface vehicles, proposing the application of cognitive twins as a way to enhance decision making. To add to that, Yun et al. [14] applied deep learning in order to improve the excessive computational time required for operational modal analysis of structures. In adition, Ruiz et al. [15] proposed a convolutional neural network in order to improve the autonomy of machinery included in aerospace manufacturing procedures. Finaly, Urdiales et al. [16] presented a multi-object tracking system, based on the Kalman filter, using a deep learning approach in order to improve autonomous driving in crowded urban roads. In the field of tribology, machine learning applications still constitute a new era of research [17], which is gradually expanding in every direction of the field. To begin with, Alves et al. [18] created a deep convolutional neural network, based on simulation data of ovalization fault conditions. The developed network was found to be accurate enough to predict the corresponding fault conditions. Furthermore, R. L. Lorza et al. [19, 20], investigated the use of FEM and data mining as combined methodologies to build a prediction model for tapered roller bearings, able to predict the maximum load carrying capacity of the mechanism. After building the FEM model of the bearing, a group of regression models was tested regarding the accuracy to predict the contact ration that appears on the bearing, for the applied loads. Moreover, Rossopoulos and Papadopoulos [21] investigated the performance of marine bearings by developing a machine learning-based analytics methodology. The machine learning algorithms were trained with data provided from a misaligned hydrodynamically lubricated journal bearing. Finally, Kokkinidis and Nikolakopoulos [22] studied the performance of misaligned journal bearings by training an Artificial Neural Network based on data from numerical simulations.
This paper extends the Machine Learning approach of [23] by adding one more method, Artificial Neural Networks (ANNs), in the authors’ effort to combine numerical and machine learning techniques, in order to build performance prediction models, for tilting pad thrust bearings that operate in mixed lubrication regime. The results of the ANN model are compared with other machine learning models in terms of accuracy to predict the coefficient of friction when the thrust bearing operates under mixed lubrication. The tribological, hydrodynamic characteristics of the bearing are calculated by solving the Average 2D Reynolds equation numerically. A Newton-Raphson based iterative algorithm is embedded in the calculation procedure in order to ensure the balance of the pad with the external forces. At the same time, the concept of the “effective temperature” [24, 25] is considered for the estimation of the effective temperature and dynamic viscosity of the lubricant during operation. Both N. Patir and H.S. Cheng (1978) [26] as well as J.A. Greenwood and J. H. Tripp (1970) [27] models are taken into consideration in order to describe the effect of roughness on the lubrication of the pad-rotor conjunction. As a result, the boundary friction is calculated along with the viscous, leading to the final calculation of the friction coefficient. Three lubricants, SAE 0W30, SAE 10W40 and SAE 10W60, are tested and compared for a variety of operating conditions and coatings. All the numerical analysis data are gathered and used in order to train machine learning algorithms. Four, different, ML methods are applied in this investigation: Artificial Neural Networks, Multi- Variable Quadratic Polynomial Regression, Quadratic SVM and Regression Trees. The
Problem formulation
Thrust bearing mixed lubrication model
The mixed lubrication regime occurs when the rotor, during operation, approaches the pad at such distance that due to the roughness of the two surfaces some asperities come in contact. At that point inside the tribo-conjunction one can identify both areas that are flooded with lubricant and no contact between the two surfaces is observed, but also areas where the lubricant’s flow has been disrupted and a contact between asperities takes place. For the current investigation two stochastic models have been applied in order to simulate the thrust bearing’s response in mixed lubrication regime. The first is the Patir and Cheng model that is used in order to model the effect of roughness on the lubrication film Eqs (1)–(4) [26]. The second is the Greenwood and Tripp model that is used in order to calculate the forces that are developed during operation, due to the direct asperities’ contact for the two rough surfaces Eqs (5)–(17) [27].
The calculation of the developed pressure distribution is based on the 2-D Reynolds equation. While moving from the hydrodynamic to the mixed lubrication regime the roughness of the surfaces has a considerable impact on the flow of the lubricant as well as on the generated pad’s pressure. As a result, the 2-D Reynolds equation needs to be transformed to the Average Reynolds equation, Eq. (1), which includes specific flow factors that compare the average pressure flow in a rough bearing to that of a smooth bearing.
Furthermore, regarding the height of the asperities in a rough surface, it is a fact that most engineering surfaces present a Gaussian distribution of heights. Thus, it is only natural to conduct investigations for Gaussian surfaces. Another important fact about engineering surfaces is that they tend to have directional patterns mainly occurred during the manufacturing procedures. These directional patterns are mostly in the longitudinal or the transverse directions.
For the present study, the transversely oriented surface pattern (
In mixed lubrication the average surface separation between the two rough surfaces has been found to be almost similar to the one predicted for smooth surface profiles [29]. It has also been found that the average asperity pressure depends on the composite (RMS) surface roughness
During mixed lubrication the total pad’s load carrying capacity is considered to be the sum of the hydrodynamic load of the lubricant and the contact load of the asperities Eq. (5). The hydrodynamic load is calculated by integrating the pressure over the pad’s surface Eq. (6). Assuming a Gaussian distribution for the asperity heights, the contact load is calculated by equation Eq. (7) using the stochastic model of Greenwood and Tripp. The
The terms
Similarly, the total friction force, Eq. (12), developed inside the pad-rotor conjunction, is assumed to be the sum of the viscous friction Eq. (13) and the boundary friction Eq. (14). Equation (15) is used in order to calculate the area of direct asperities’ contact. The statistical Gaussian distribution of the asperity heights
Schematic of the rotor – pad conjunction in mixed lubrication regime.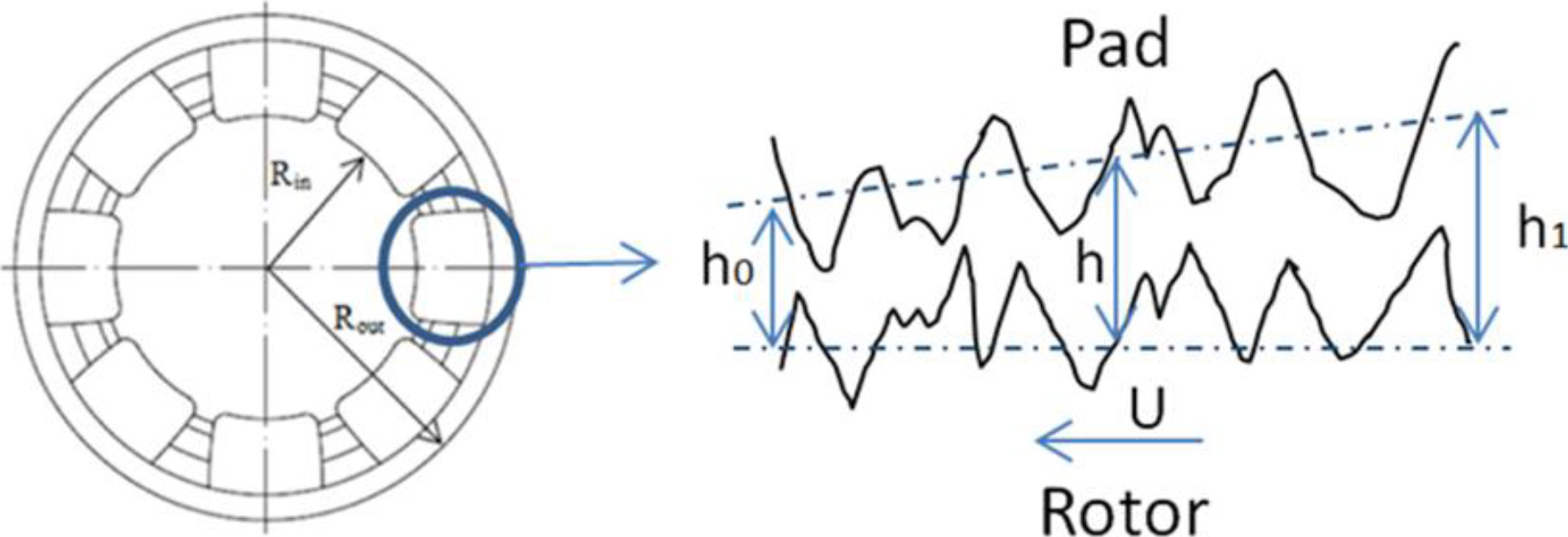
In Eq. (14)
The concept of the “effective temperature” [26] is taken into consideration to approximate the operating viscosity value without applying complex and time consuming THD algorithms. The effective temperature value inside the lubricant’s domain is calculated from Eqs (18) and (19) [26]. The variation of temperature
As mentioned before, the hydrodynamic lubrication of a thrust bearing is based on two fundamental principles. First of all, in order to generate a lubrication film capable to carry load, two surfaces must rotate with a relative velocity to each other. In addition, a wedge must be formed between the two surfaces at some relative angle. The one surface is assumed to be rotating at a certain velocity and is usually called the <<runner>> or the <<rotor>>. In pivoted pad thrust bearings, the other surface – also called the <<pad>> – is stationary and is assumed to be rotating only around a fixed point.
There are fundamental assumptions that have been taken into consideration to simplify the analysis. The laminar and isothermal flow of a Newtonian and incompressible lubricant was assumed within the tribo-conjunction without the appearance of cavitation effects. Furthermore, based on the fact that the radius of curvature of the pad’s arcs is such, that if they were to be approximated with small linear line segments, the tendency of a straight line would appear, the pad is simulated with a rectangle that pivots around its center as shown in Fig. 1. The Average Reynolds equation is subsequently solved in the Cartesian coordinates system by applying the numerical procedure of Finite Differences.
2D Grid of the tilting pad of the thrust bearing with 2,500 finite cells.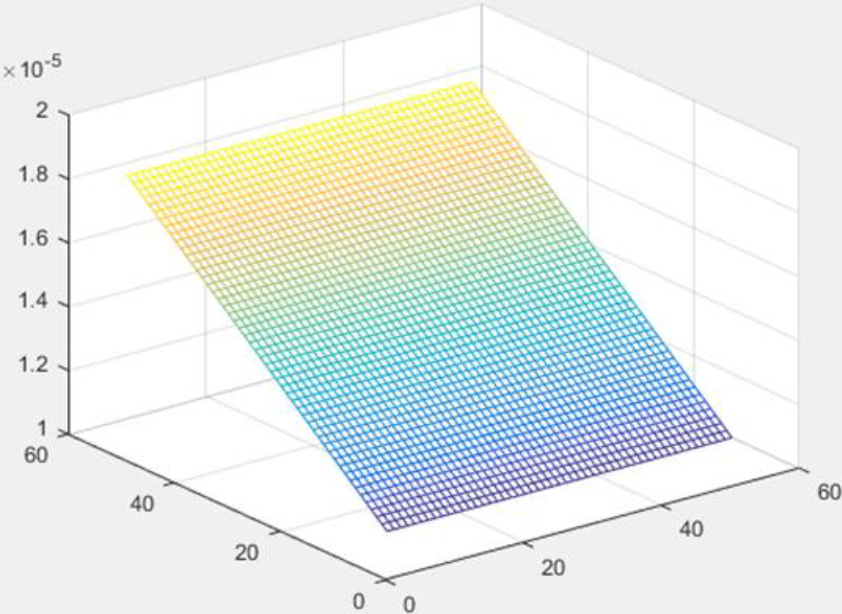
As shown in Fig. 2, a 2D mesh is applied in order to discretize the pad. After a sequence of spatial resolution tests the final mesh consists of 50 finite cells in the direction of the flow and 50 in the cross-flow direction that corresponds to a total number of 2,500 finite cells.
The second step of a numerical analysis includes the definition of the initial and boundary conditions that are essential for the calculations. Initially, an angular velocity,
The shear stress is calculated with Eq. (24):
The Average 2-D Reynolds Eq. (1) is modified as shown in Eq. (2.3) for the calculation of the nodal pressure
A Gauss-Seidel iterative algorithm, with a set of linear algebraic equations, is built, based on the above finite difference – central differences methodology. A repetitive procedure of calculations in the flow’s direction is performed until the computed pressure and the inclination of the pad satisfy the convergence criteria.
The Newton-Raphson methodology is applied on the inclination parameter
Iterative computational algorithm flow chart.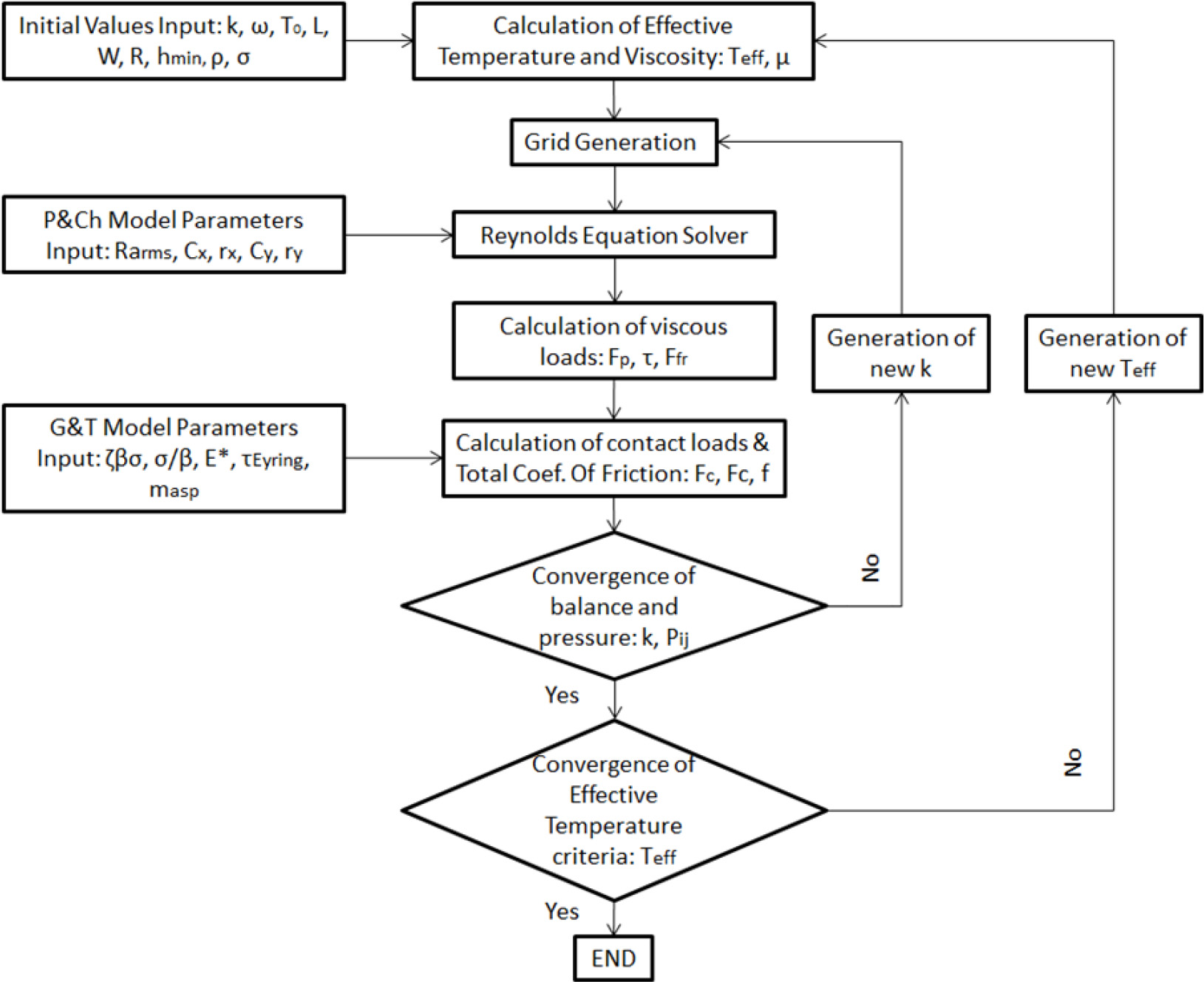
The flow chart shown in Fig. 3 represents the final, complete algorithm that is used to calculate the tribological characteristics of the hydrodynamic tilting pad thrust bearing in mixed lubrication regime. The initial, geometrical and operational characteristics of the simulation are entered and the effective temperature is calculated along with the corresponding dynamic viscosity of the lubricant. Then the grid is generated and the boundary conditions are applied. For the next step the Average Reynolds equation is solved numerically, using the finite difference method, while the flow factors from the model of Patir and Cheng are calculated for transversely oriented rough surface pattern. Applying numerical integrations the viscous load and friction are calculated along with the contact forces from the model of Greenwood and Tripp and then summed to define the total load carrying capacity and friction force for the thrust pad. Finally, two decision nodes are applied. The first, includes the convergence criteria for the calculation of pressure and balance of the pad that returns the algorithm back to the calculation of a new grid. The second includes the convergence criteria of the effective temperatures that lead the algorithm back to a new calculation for the dynamic viscosity. The algorithm ends only when all three convergence criteria are met.
Numerical versus Experimental specific pad load and minimum film thickness data validation.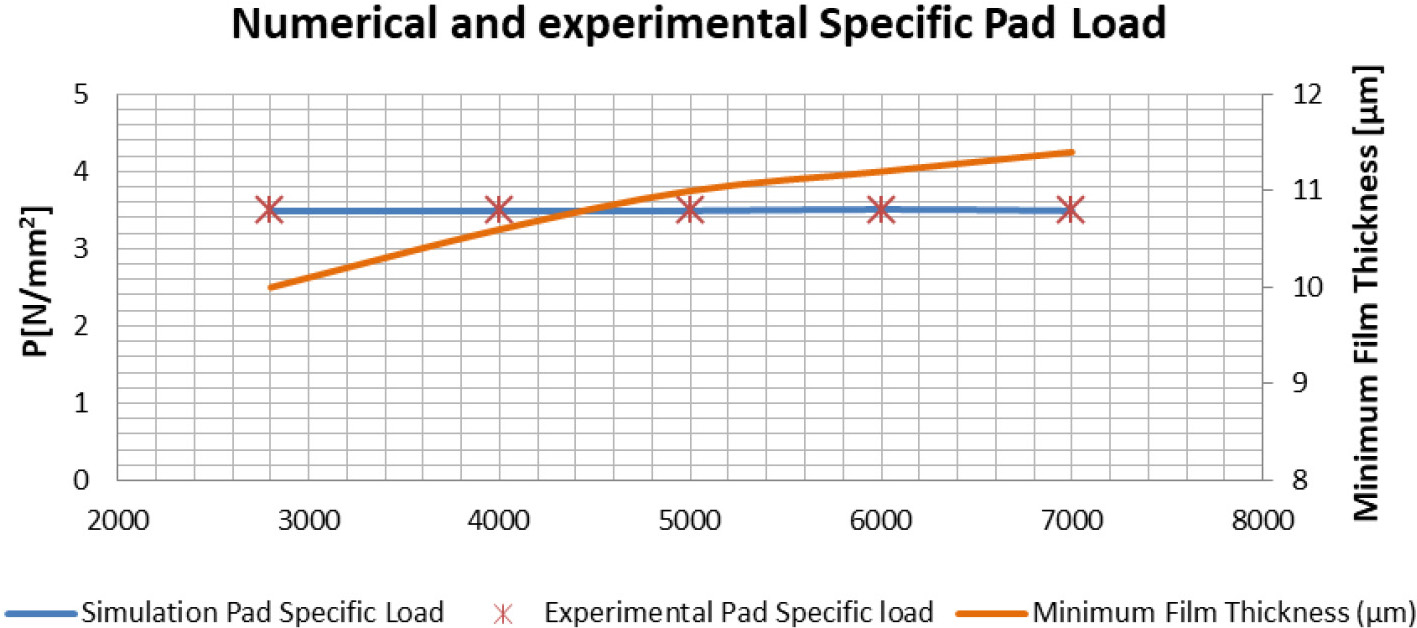
Figure 4 is a graphical representation of the results from the validation process of the numerical algorithm. The data applied for validation derive from the experimental work of Bielec and Leopard [35]. The calculated pressure inside the bearing is compared to the provided experimental results for an increase in rotor’s velocity while the minimum film thickness follows the suggested experimental values. The results show a good agreement between experimental and simulation values.
Since computer science has been widely developed and applied in many fields over the last decade, a variety of machine learning techniques as well as programming languages and softwares are available to researchers in order to investigate optimum, tailor-made solutions for each specific problem [36, 37]. In the current paper, the thrust bearing’s performance prediction, in mixed lubrication regime, is examined, utilizing Artificial Neural Networks. These smart systems have the ability to learn characteristics of complex systems and give results faster than traditional methods. At the same time, a comparison of the developed ANN is performed to Polynomial Regression models, Support Vector Machines (SVM) Regression Models as well as Regression Trees.
To begin with, Artificial neural networks (ANNs) consist of basic elements that imitate biological nervous systems. In general, the ANNs are submitted to a training procedure of connection-weights aiming to associate specific inputs with specific target values. The ANN training process is done by using pairs of input and output vectors (supervised learning) and is deployed until a convergence is reached. A simple ANN model with a vector of inputs x is presented here. The inputs
The transfer function can be selected from a variety of functions, such as linear, tan-sigmoid, log-sigmoid, ReLU etc. A network may have multiple layers and the outputs of each intermediate (hidden) layer are used as inputs for the next layer.
As mentioned earlier, the ANN is undergoing supervised training, in which the learning rule is presented with a set of desired network behavior examples,
The second machine learning methodology examined in the current paper is the Quadratic Polynomial Regression. Equation (28), describes the relationship between one response variable
Equations (29) and (30) describe in matrix form the system that needs to be solved for a dataset of n-observations to derive the corresponding regression model and calculate
For the application of a quadratic polynomial regression model, the
Equation (2.4) represents the final model in matrix form.
The least square method (LSM) [38] is used to identify the best fit curve or line for one set of data points by reducing the sum of the squared residuals of the points of the curve. As a result the corresponding slopes (
The third machine learning method examined is the Quadratic Support Vector Machine Regression. Support vector machines (SVM) is a supervised learning algorithm mainly applied for classification and regression problems as support vector classification (SVC) and support vector regression (SVR). SVM was first identified by Vladimir Vapnik et al. on 1992 [39] and it is usually applied for smaller datasets as it takes too long to process. There are cases where the data do not allow a linear model to be built. In these cases a non-linear SVM regression model is built based on the nonlinear kernel functions. For the current investigation, the polynomial kernel function Eq. (33) is applied for the
The final machine learning method investigated is the Fine Trees. CART- Regression Trees belong to the general family of Decision Trees and were originally developed by Breiman et al. on 1984 [40].
Regression model validation with experimental data.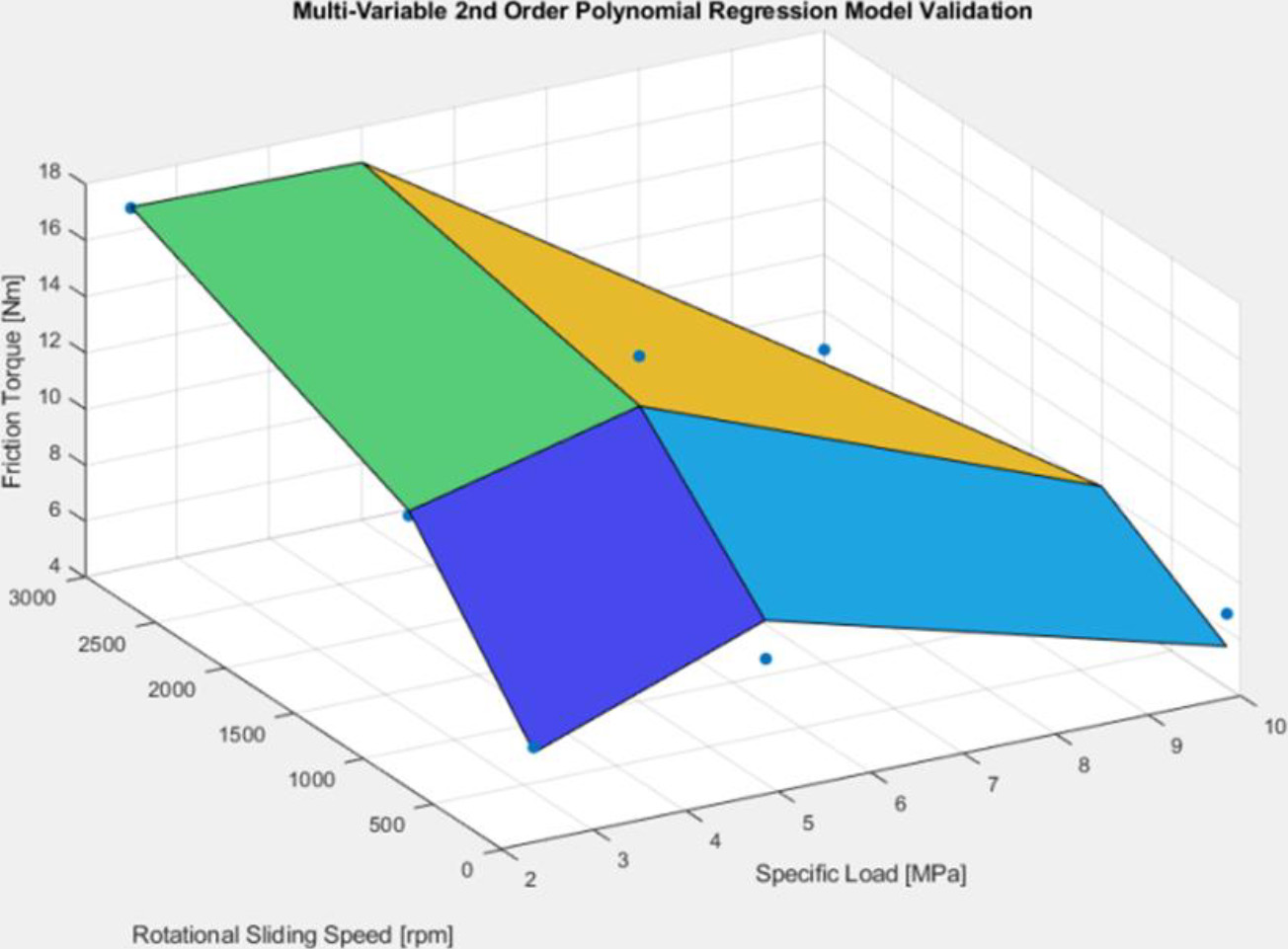
A classification or regression decision tree is used as a predictive model to draw conclusions about a set of n-observations. To perform the analysis of the current investigation all the data must be sorted in ascending order for both predictors
When training a model, it is important not to over-fit or under-fit it. The choice of training set and test set is critical in reducing this risk. However, dividing the dataset to maximize both learning and validity of test results is difficult. For the current investigation the k-fold cross validation technique is applied as one of the most popular methodologies to randomly partition data. With a value of
The goodness of fit for the generated models is determined by calculating the corresponding
A validation procedure of the developed Quadratic Polynomial Regression algorithm was followed based on experimental data from Michal Wasilczuk et al. [41]. Figure 5is graphical representation of the generated model in comparison to the dataset. The calculated coefficient of determination for the case study is 0.944 and the regression model is presented in Eq. (2.4):
In summary, a numerical analysis algorithm is developed in order to solve the mixed lubrication problem of a tilting pad thrust bearing. The algorithm is solved for various operating conditions and coatings. The simulation data are gathered and used in order to train ML models able to predict the friction coefficient of the bearing with high accuracy and remarkable speed.
Lubricants’ properties
Lubricants’ properties
Coating’s properties
General input data
The numerical analysis simulations were performed for sliding shaft speeds of 0.5 m/s to 5 m/s and external applied load on the pad 8450N. Three lubricants were used for the simulations: SAE 0W30, SAE 10W40 and SAE 10W60. In addition, all simulations were performed for a steel shaft, a plain steel pad as well as 4 different coated pads with TiN, CrN, TiAlN and DLC. The flow factors’ parameters were defined from Patir & Cheng’s model for a transversely oriented surface with
Problem formulation flow chart.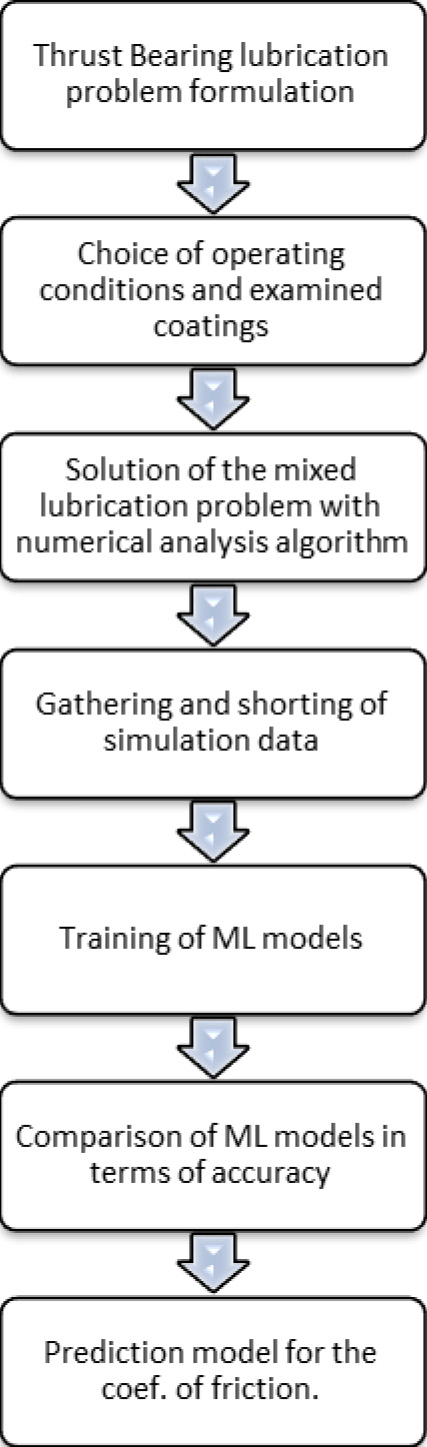
Typical pad pressure distribution.
A typical pressure distribution from the numerical analysis of the pad bearing is shown in Fig. 7.
Variation of the pressure flow factors 
Moreover, the variation of the pressure flow factors
It is clear that while
Loss function of ANN during training epochs (SAE W40).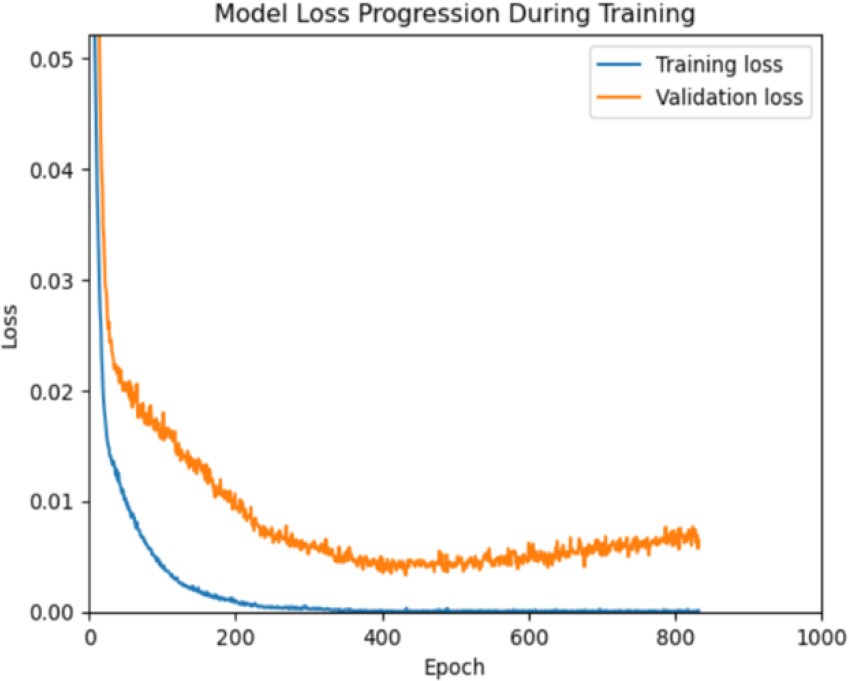
There are many different ANN types with different topologies. The one that will be used in this study is a feed-forward multilayer perceptron. The choice of the feed-forward multilayer perceptron is due to its simple nature and the accuracy of the results. The regression neural network consists of two inputs and one output. The inputs are the coatings (Young’s Modulus in GPa) and the velocity (m/s) of the rotor. The loss function is the ‘mean squared error’, the optimization algorithm is the ‘Adam’, the activation function for hidden layers is ReLU and the output layer is the ‘linear’. The network has one hidden layers with 20 neurons. The dataset for the NN was created for different velocities and Young Modulu’s values while the total number of samples is 60 for each lubricant. Of these data, 60% have been used for training, 20% for validation and the last 20% for testing. The output of the network is the coefficient of friction. A typical representation of the model loss progression during training is shown in Fig. 9.
Comparison of ANN and simulation values for SAE 0W30.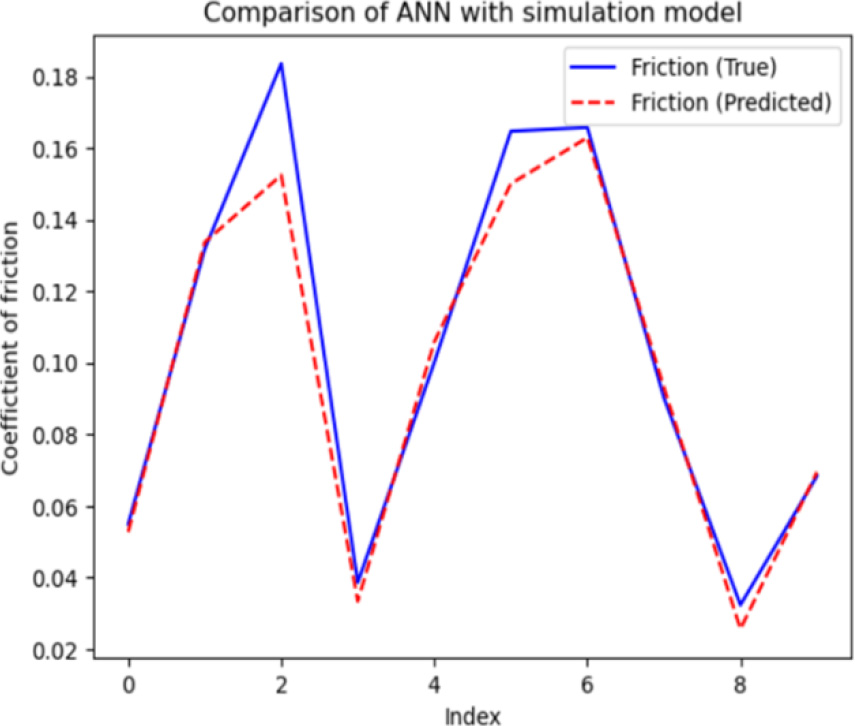
Comparison of ANN and simulation values for SAE 10W40.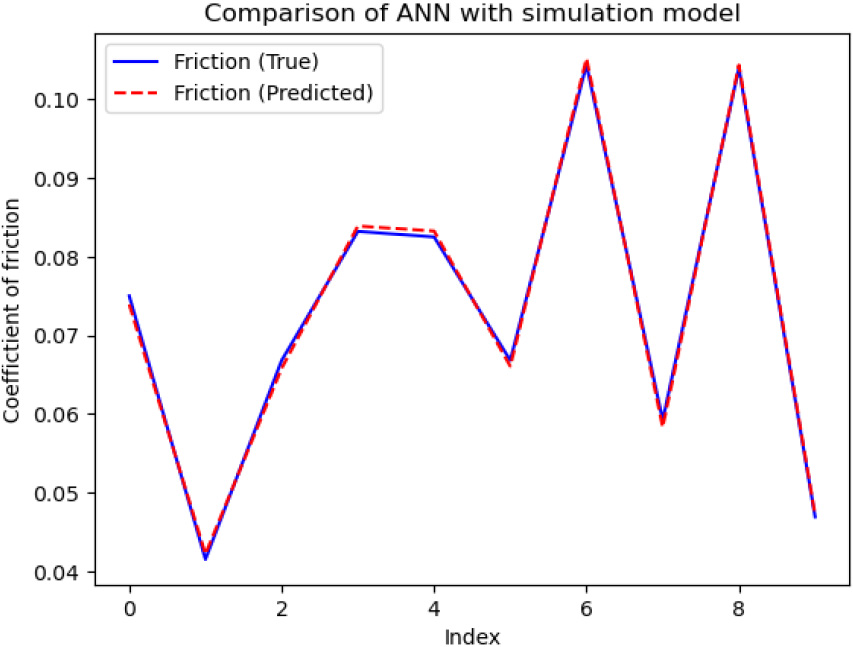
Comparison of ANN and simulation values for SAE10W60.
Quadratic regression ML models
Multivariable quadratic polynomial regression models response plot.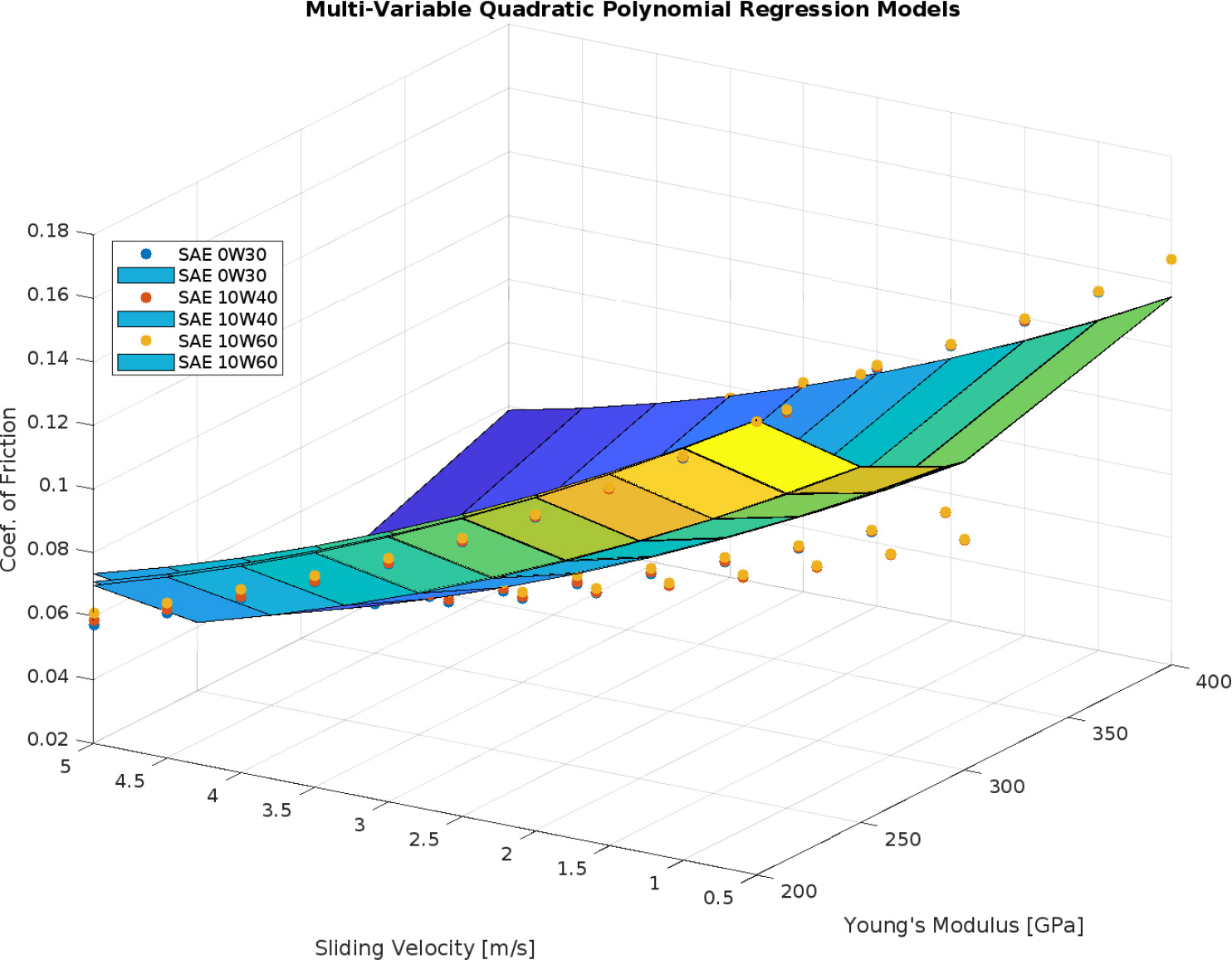
The trained ANN models showed a very good fitting in the simulation data. The ANN metrics of all the ANN models are gathered in Table 4. The comparison of ANN results and simulation values for the three lubricants are represented graphically in Figs 10, 11 and 12.
Quadratic SVM model SAE 10W40 response plot for sliding velocity.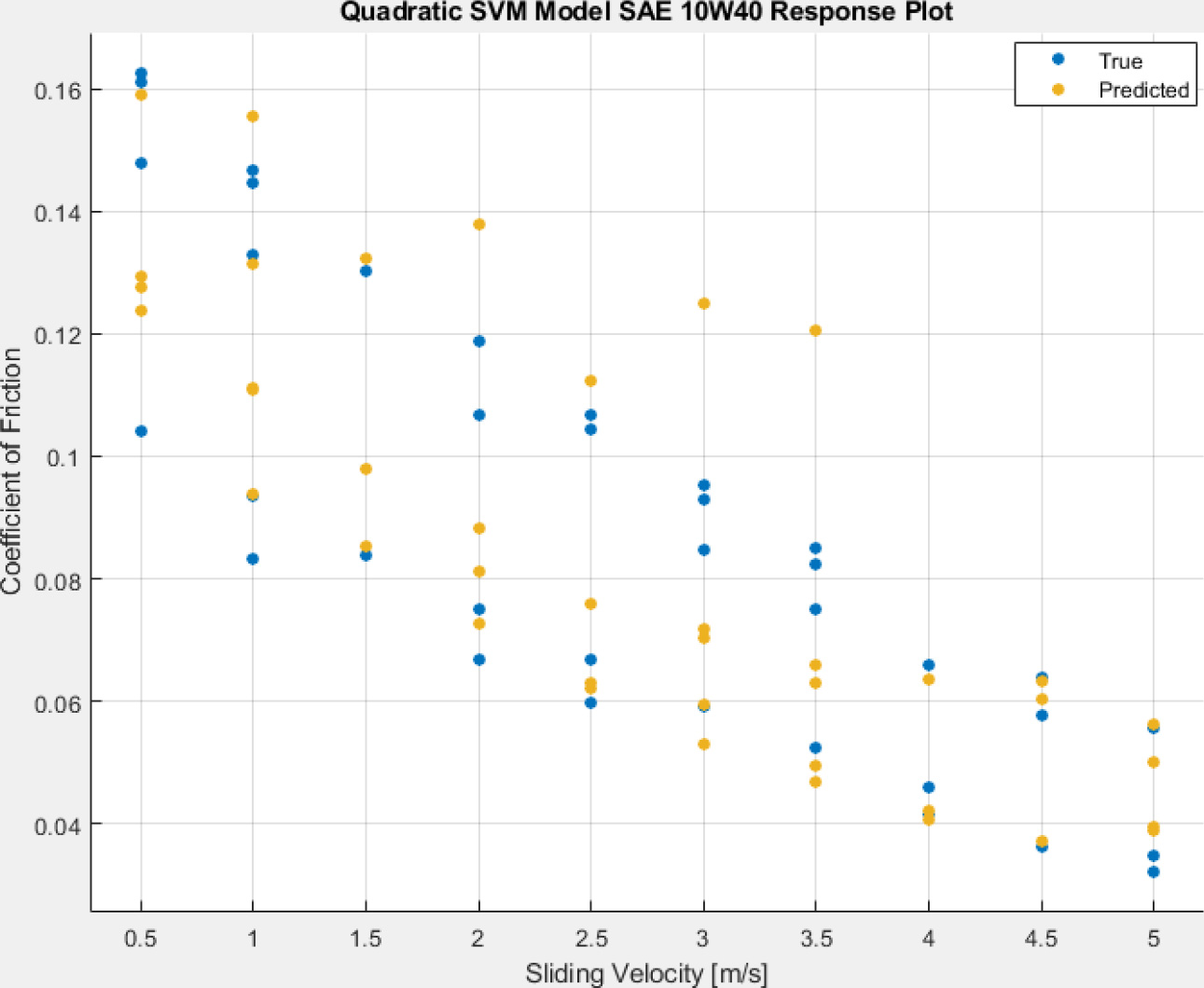
Quadratic SVM model SAE 10W40 response plot for Young’s Modulus.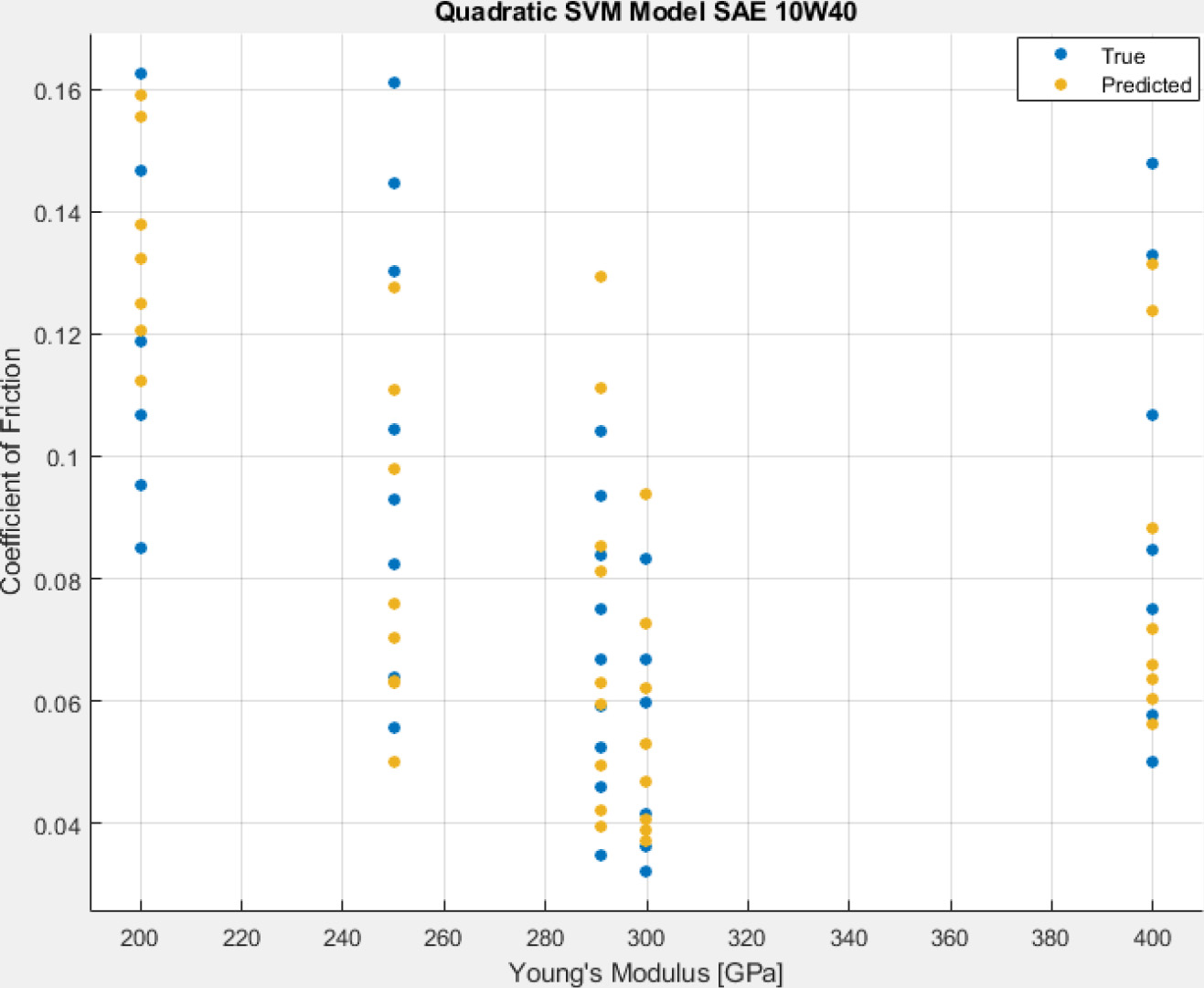
Typical Fine Tree ML model for SAE 10W40.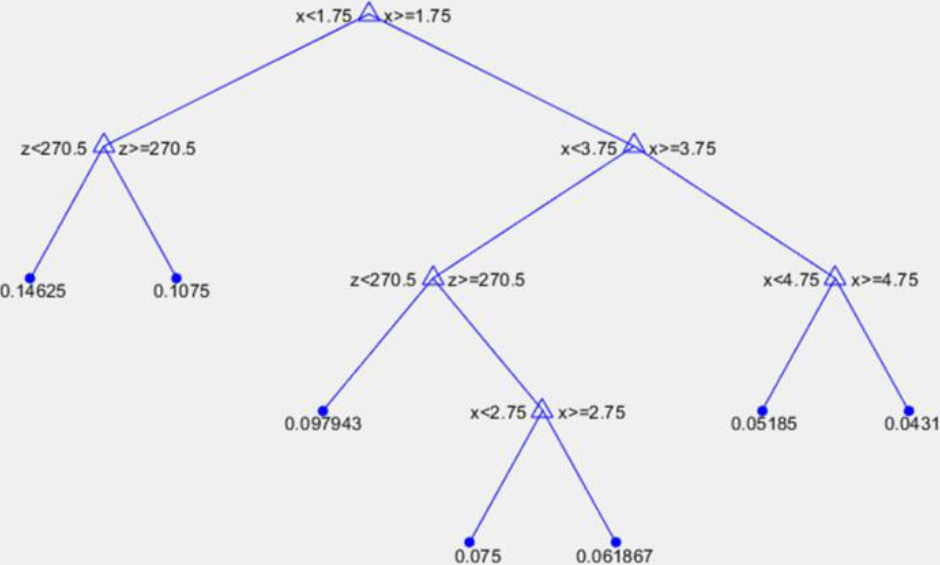
Overfitting is a common problem in machine learning. Overfitting means that the model is over trained on the training data set, resulting in weights adjusted to the noise in the training data instead of learning “a general predicting rule” [42].
In order to achieve better performance of the networks and avoid overfitting several methods were applied during the training such as early stopping, feature scaling and decaying learning rate of the optimization algorithm [43]. Specifically, the early stopping method stops the training, after a number of optimization steps that do not lead to a decreased validation loss. Feature scaling can be done for the whole dataset during the preprocessing stage and it means that every feature in the dataset is scaled independently in the range 0–1.
A variety of different ANN architectures was tested following a trial-and-error process to determine the most efficient one for the current system. The examined networks were evaluated for different numbers of layers, neurons and activation functions in order to identify the architecture that provided optimum performance while avoiding overfitting. A different combination of hyperparameters for the ANNs is possible to provide even higher coefficient of determination and even lower error. Nevertheless, with R2 varying from 0.96–0.98, the results achieved with the developed ANNs in this study can be characterized as efficient. The results show that, based on the velocity and Young Modulus’s value, the coefficient of friction can be fully estimated with great accuracy. The calculation of the coefficient of friction using the ANN methodology is the key point of this work.
The next ML models that were created from the numerical analysis data were based on Quadratic Polynomial Regression. The results for the three lubricants SAE 0W30, SAE 10W40 and SAE 10W60 are shown in Table 5. All models use two independent predictors:
SVM and Fine Tree ML models R2 values
Figure 13is the representation of the generated regression surfaces. The dots represent the simulation values while the surfaces represent the regression models developed with the LSM for all three lubricants, sliding velocities and coatings – represented with their corresponding Young’s Modulus values. It is easily noted that the drop of the sliding velocity leads in rise of the coefficient of friction in both cases. It is true that as the velocity drops so does the minimum film thickness and the amount of lubricant flowing inside the mechanism. As a result, the hydrodynamic characteristics of the bearing and the viscous friction do not have a significant impact on the final performance. However, the contact of the two surfaces that come closer as the minimum film thickness wanes, gain a leading role on the total amount of friction that is developed within the conjunction. At this point, the material of the surfaces that come in contact has a significant impact on the coefficient of friction. From Fig. 13, it can be seen that rough materials like steel and CrN show large coefficient of friction values, while the smoother materials do help the mechanism operate with lower friction. In all studies cases the DLC coating shows up to 45% better performance in terms of low coefficient of friction values. At the same time the three lubricants, although with a notable difference in viscosity, show similar behavior, due to the fact that the viscous forces do not affect the performance of the bearing significantly, as
For comparison purposes the same data sets were used in Matlab’s Regression Learner application in order to train Quadratic SVM and Fine Tree Regression models. The results of these models are summarized in Table 6.
Typical response plots for the quadratic SVM model of SAE10W40 are shown in Figs 14 and 15.
Finally, a typical Fine Tree model for SAE 10W40 is shown in Fig. 16.
Comparison table of ML models based on R2
Comparison of the ML methods in terms of fit to the dataset using the coefficient of determination [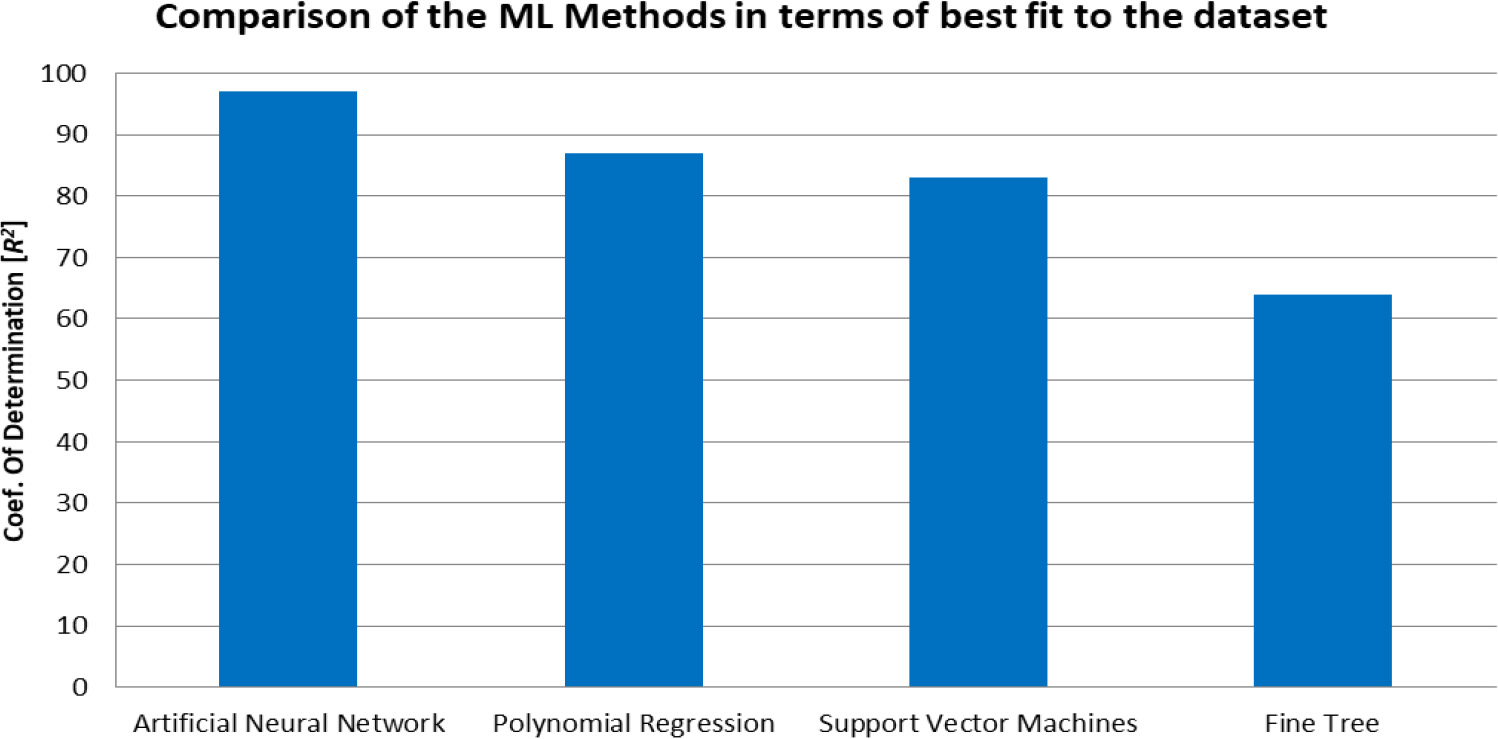
The coefficient of determination
For the current investigation, a pivoted pad thrust bearing was simulated in mixed lubrication regime for various speeds, lubricants and applied coatings. All the simulation data were then used in order to train machine learning models able to predict the coefficient of friction based on velocity and coating as inputs. In that way the modeling of thrust bearings’ lubrication can evolve from analytical and time consuming numerical models to ML models that are fast and provide accurate results when trained properly.
Summarizing the results from the tribological perspective, all the lubricants were found to have an almost similar coefficient of friction in mixed lubrication regime because as the velocity of the rotor reduced, the viscous loads tended to have lower impact on the final performance of the bearing while the contact forces played the major role. In addition, the DLC coating, having the least roughness of all, showed the best tribological performance for the tilting thrust bearing pad reaching up to 45% reduction for the friction coefficient compared to the rest of the coated and uncoated surfaces.
From the Machine Learning perspective, the R2 was the metric chosen in order to compare the various machine learning models in terms of best fit in the simulation data that would eventually provide the best prediction model. The machine learning models that were examined during the investigation include Artificial Neural Networks, Quadratic Polynomial Regression models, Support Vector Machines and Decision Trees. From all the examined models the ANN were the ones that showed the highest R2 values and are suggested as the most suitable in order to build performance prediction models for pad thrust bearings in mixed lubrication regime.
As future extension of the current research, meta-algorithmic methods [44] could be investigated and compared along with various architectures of ANNs. To add to that, recent trends indicate that the development of Physics-informed neural networks (PINNs) [45, 46] could be a potential solution to the presented problem and should be taken into consideration for future applications in mixed lubrication bearings’ problems. Finally, more sophisticated supervised machine learning algorithm such as Neural Dynamic Classification algorithms, Dynamic Ensemble Learning Algorithms, Finite Element Machines for fast learning and self-supervised learning [47, 48, 49, 50] appear to be of great interest regarding future research related to the presented problem but also generally for applications in the field of Tribology.
Footnotes
Acknowledgments
The publication fees of this manuscript have been financed by the Research Council of the University of Patras.
Nomenclature
|
|
Pad’s surface [m2] |
|---|---|
|
|
Apparent contact area [m2] |
|
|
pad length in x-direction [m] |
|
|
Empirical Coefficient according to surface orientation for rough surfaces |
|
|
first viscosity coefficient – absolute temperature at which (323 K) |
|
|
second viscosity coefficient according to Sutherland’s law 3,800 |
|
|
third viscosity coefficient according to Sutherland’s law 30,000 |
|
|
constants for each neighbor node: north, south, west, east |
|
|
Specific Heat [J/kgK] |
|
|
Expectancy operator |
|
|
Total friction force [N] |
|
|
Hydrodynamic and Contact friction force [N] |
|
|
film thickness [m] |
|
|
outlet, inlet film thickness [m] |
|
|
Nodal film thickness [m] |
|
|
minimum film thickness [m]: |
|
|
Descrite variable for node definition in the direction of the flow |
|
|
Iterations counting variable for Newton Raphson algorithm on |
|
|
Descrite variable for node definition in the cross – flow direction |
|
|
convergence ratio: |
|
|
Empirical constant for good agreement between theory and experiment 0.8 [21] |
|
|
pad’s width in y-direction [m] |
|
|
Variable lubricant’s width [m] |
|
|
Inlet lubricant width [m] |
|
|
Start (1) and end (2) lubricant’s positions in the pad’s inlet area [m] |
|
|
Total number of nodes in j direction |
|
|
Fraction of oil film coverage on the leading edge of the pad |
|
|
Total number of nodes in i direction |
|
|
absolute nodal pressure [Pa] |
|
|
absolute pressure [Pa] |
|
|
Atmospheric pressure [Pa] |
|
|
Lubricant flow [m3/h] |
|
|
Lubricant flow in inlet and outlet area of the pad [m3/h] |
|---|---|
|
|
Lubricant outflow from the sides of the pad [m3/h] |
|
|
Lubricant flow in x and y directions [m3/h] |
|
|
Inner and Outer pad’s radious [m] |
|
|
Inlet Pad Radious for the beginning of the lubrication film’s width [m] |
|
|
Pad radious at mid sector [m] |
|
|
Empirical Coefficient according to surface orientation for rough surfaces |
|
|
temperature [K] |
|
|
Inlet temperature [K] |
|
|
Effective Temperature [K] |
|
|
Time [sec] |
|
|
linear rotor velocity [m/s] |
|
|
Velocity along x axis [m/s] |
|
|
Volume [m3] |
|
|
Total load carrying capacity [N] |
|
|
Hydrodynamic and Contact load [N] |
|
|
Independent length variable in the direction of the flow [m] |
|
|
Independent length variable in the cross (radial) direction of the flow [m] |
|
|
Independent length variable on the vertical axis of the flow [m] |
|
|
Average asperity radious [m] |
|
|
Ratio of longitudional and transverse correlation lengths of the asperities |
|
|
Composite Young Modulus [Pa] |
|
|
Young Modulus of Elasticity [Pa] |
|
|
Surface density of the asperity peaks |
|
|
Fraction of minimum film thickness and composite surface roughness commonly used to define the lubrication regime. |
|
|
dynamic viscosity coefficient [Pasec] |
|
|
nominal dynamic viscosity [Pasec] |
|
|
Coefficient of boundary shear strength |
|
|
Coefficient of friction |
|
|
Poisson’s ratio |
|
|
Density [kg/m3] |
|
|
Composite (RMS) surface roughness [ m] |
|
|
Surface roughness for the pad (p) and the rotor (r) |
|
|
Shear stress [Pa] |
|
|
Eyring shear stress [Pa] |
|
|
Pressure Flow Factors |
|
|
Rotational Velocity [rpm] |