
Abstract
Salt and Pepper noise removal is an important image preprocessing task, it has two simultaneous demands: the suppression of impulses and the preservation of edges. To address this problem in gray scale images, we propose an efficient method which consists of introducing a Redescending M-Estimator within of the Median-Estimator scheme. The Redescending M-Estimator controls the magnitude of the Salt or Pepper impulses and deletes them when it is necessary; the remaining pixels in the neighborhood are processed by the Median-Estimator in order to obtain an estimation of a noise free pixel. The proposed scheme is applied on the entire image using sliding windows of size 5
Keywords
Introduction
The impulsive noise is a common problem in digital images; usually it is incorporated when they are acquired or transmitted through communication channels. This type of noise has been modeled in different ways, by means of fixed intensity pixel values (Salt and Pepper noise) or by random intensity pixel values (Random impulsive noise) [4, 6, 14, 22]. In the fixed valued noise, some pixels of the image are changed into 0 or 255, whereas random valued impulse noise changes the intensity value into a random value that goes from 0 to 255. These values are valid just when the images are in 8-bit mode.
High level image processing tasks demand noiseless images with a visual quality; this means that the noise has to be suppressed with no deterioration of the fine details. To suppress the Random impulsive noise some important methods have been proposed in the literature. In [21], a technique based on concepts derived from robust statistics is presented, which can be regarded as a generalization of median filter. In [26], an effective switching median-mean filter is proposed, this method is formed by two stages, in the first one the pixels are detected as noisy or noise-free, in the second one the filtering process is developed by the switching median-mean filter or switching mean-median filter. A fuzzy filtering approach based on turbulent particle swarm optimization is presented in [7], this filter contains a parallel fuzzy inference mechanism, a fuzzy mean process, and a fuzzy composition process. In [15], a neuro-fuzzy network is presented, this is constructed by combining two neuro-fuzzy filters with a postprocessor, each filter is a first order Sugeno type fuzzy inference system with 4-inputs and 1-output and it evaluates a different relation between the median value of all the pixels in a predefined selecting data window. On the other hand, to suppress the Salt and Pepper noise some interesting results have been proposed in the literature. In [10], an approach with the ability to remove high-density noise in images without deteriorating their edges is proposed, it is based on the benefits of non-local means and the efficiency of unsymmetric trimmed mean (applied by means of discrete wavelet transform). A recursive and enhanced median filter method to remove impulsive noise with high density is described by the authors in [19], this technique can detect and remove noise in a simultaneous way. An adaptive methodology formed by an efficient salt and pepper noise detector, an adaptive mean-median filter and the total variation inpainting method are joined to obtain a robust filtering technique in [9]. In [17], a technique to suppress impulsive noise with high density by using a recursive and adaptive median filter is introduced, in the proposal the adaptive operation is justified with the variation in size of working window, which is centered at noisy pixels. An Iterative Adaptive Fuzzy Filter Using Alpha-Trimmed Mean was presented in [1], the filter operated in two stages-detection of noisy pixels with an adaptive fuzzy detector followed by denoising using a weighted mean filter on the good pixels in the filter window.
Some algorithms aforementioned were variations of median and mean filters, the other ones were based on Fuzzy Logic or hybrid techniques. After exploring these filters, we found two shortcomings: (1) when they used impulse detectors, the variability among all the pixels in the square window was not consider, (2) most of them were focused simply in suppressing the impulses, without considering the magnitude reduction of extreme pixels (salt or pepper impulses). To cover both shortcomings, we implemented a methodology based on an impulse detector and robust estimators of location. The impulse noise detector considers the dispersion between pixels and their neighbors, to do this it sets some conditions, when they are satisfied the pixel of interest is considered as noise-free and therefore is not submitted to removal process; in the other case, the pixel being analyzed and its neighbors are processed by the robust estimators in order to calculate the best estimation of a noise free pixel. The robust estimation consists of a Redescending M-Estimator and a Median-Estimator. The first estimator analyzes all pixels into the neighborhood in order to decrease the contribution of salt or pepper impulses as well as to suppress them when is required, its performance is controlled by their influence function (
An outline of the remainder of the paper is as follows. In Section 2, a briefly discussion about the Salt and Pepper noise model and Robust Estimators is presented. The suggested proposal is described in detail in Section 3. Section 4 reports the experimental results of our scheme, as well as the comparisons with other state-of-art methods. The conclusion and the next effort are drawn in Section 5.
Background
This section describes the impulse noise model and the robust estimators of location considered in this study.
Impulsive noise model
In the well-known Salt and Pepper model some pixels of an image
where,
Robust estimators were developed to overcome the noise sensitivity of least square method [8], the most popular robust estimators are:
To introduce the M-Estimators of location it is convenient to consider a set of points distributed independently
where, the robust loss function
where,
The expression Eq. 4 can be reformulated by using the weight function
This reformulation is usually referred as the W-Estimator, the weight function in Eq. 5 reflects the importance of the sample in its contribution to the estimate of
The expression Eq. 5 allows to get a single result. In [18], it was indicated that an iterative newton method required only five iterations to get a location estimate
where,
Influence functions test in the Redescending M-Estimator
The Median-Estimator is a well-known robust estimator of location; it is based on the order statistics. This concept has played an important role in statistical data analysis and especially in the robust analysis of data contaminated with outlying observations, called outliers (impulses) [18]. The order statistics suggests that a data sample
A successful proposal to remove the Salt and Pepper noise in grayscale images involves both the noise suppression and the preservation of the fine details of the images. For this purpose, we propose a scheme based on robust estimators of location, in addition of an impulse detector. Accordingly, our method consists of two stages: detection and suppression. Both procedures are described in the following subsections.
Stage 1: Impulse noise detector
Each pixel of the noisy image
where,
The mathematical expression Eq. 6 considers both negative and positive
According to Eq. 9, the influence functions listed in Table 1 have to be rewritten in terms of the absolute deviations around the median; for this purpose, we propose to do it such as it is depicted in Table 2. In addition, we suggest some adaptive ways to compute more selective thresholds.
Modified influence functions test in the redescending M-Estimator
As it can be seen in Table 2, the first four influence functions adjust the intensity of some pixels and stand at
Finally, to obtain an estimate of a noiseless pixel, the expression Eq. 9 is introduced into the Median-Estimator Eq. 7, this procedure is done considering just the
where,
The proposed algorithm is summarized as follows:
To provide a better efficiency and performance of our proposal we recommend working with rectangular windows, with a size of 5
Restoration results in PSNR (dB) terms, for the existing and proposed methods
Restoration results in PSNR (dB) terms, for the existing and proposed methods
Restoration results in MAE terms, for the existing and proposed methods
Experimental tests were carried out on the well-known grayscale images Lena, Peppers, Baboon and Barbara; all of them with a size of 512
The performance of our scheme (using different influence functions) was compared with five state-of-the-art filtering methods designed to suppress Salt and Pepper noise, such as the Efficient Three-Stage Scheme (ETSS) [10], Recursive and Enhanced Median Filtering (REMF) [19], Non Local Means-Decision Based Unsymmetric Trimmed Median (NLM-DBUTM) [9], Recursive and Adaptive Median Filter (RAMF) [17], Iterative Adaptive Fuzzy Filter (IAFF) [11]. We identified our scheme as Median Redescending M-Estimator (MRME), the influences functions analyzed Simple Cut (SC), Andrew’s Sine (AS), Tukey Biweight (TB), Hampel’s Three Part Redescending (HTPR) and Insha (I) were expressed as subscripts; therefore, the notation used was: MRME
Graphical illustrations of the comparative PSNR (dB) for the existing and proposed method: (a) Lena image, (b) Peppers image, (c) Baboon image, (d) Barbara image.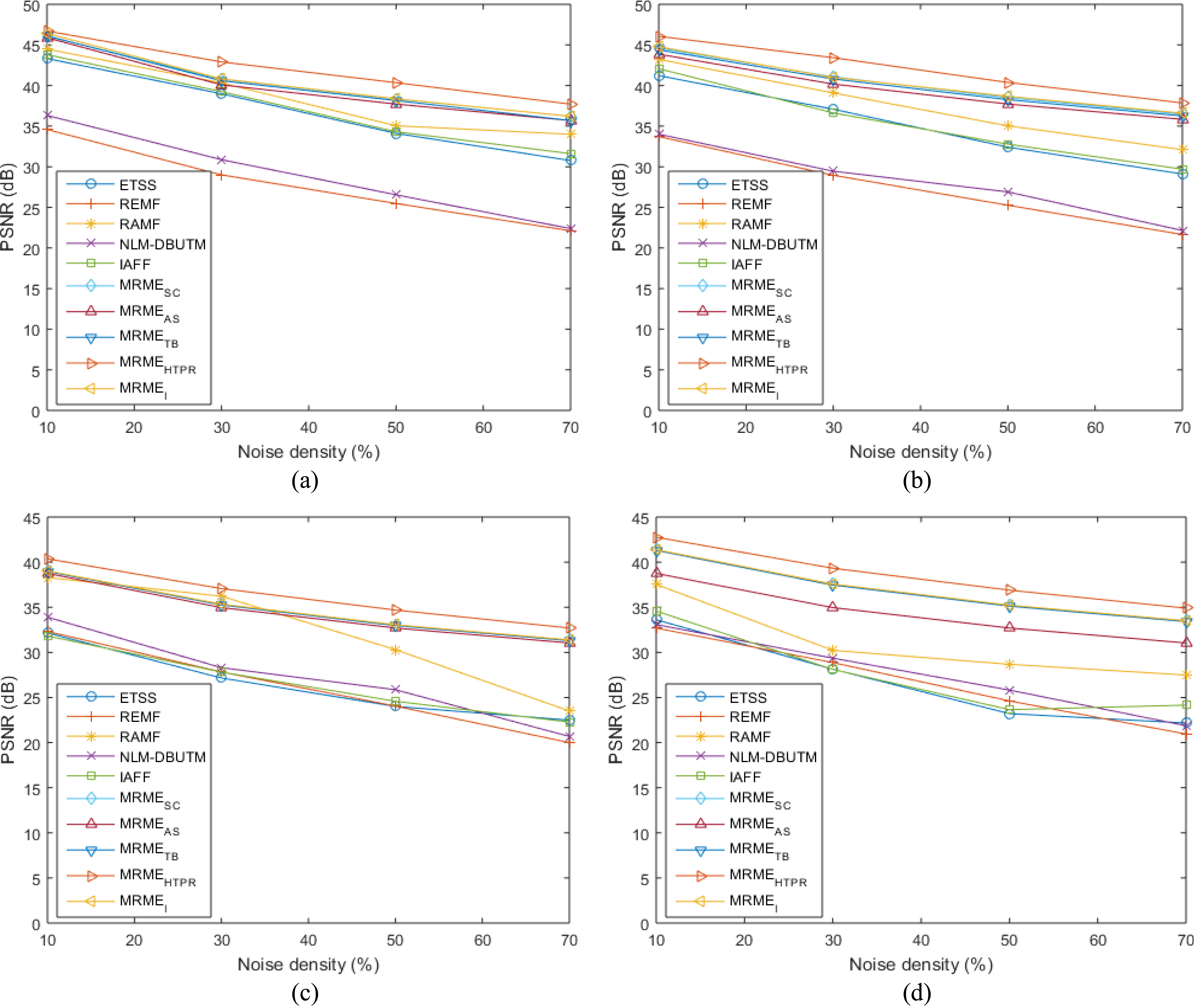
Graphical illustrations of the comparative MAE for the existing and proposed method: (a) Lena image, (b) Peppers image, (c) Baboon image, (d) Barbara image.
Peppers images rendered by the proposed and competing algorithms: (a) original noise-free image, (b) 30% noise corrupted; (c) ETSS, (d) REMF, (e) RAMF, (f) NLM-DBUTM, (g) IAFF, (h) MRME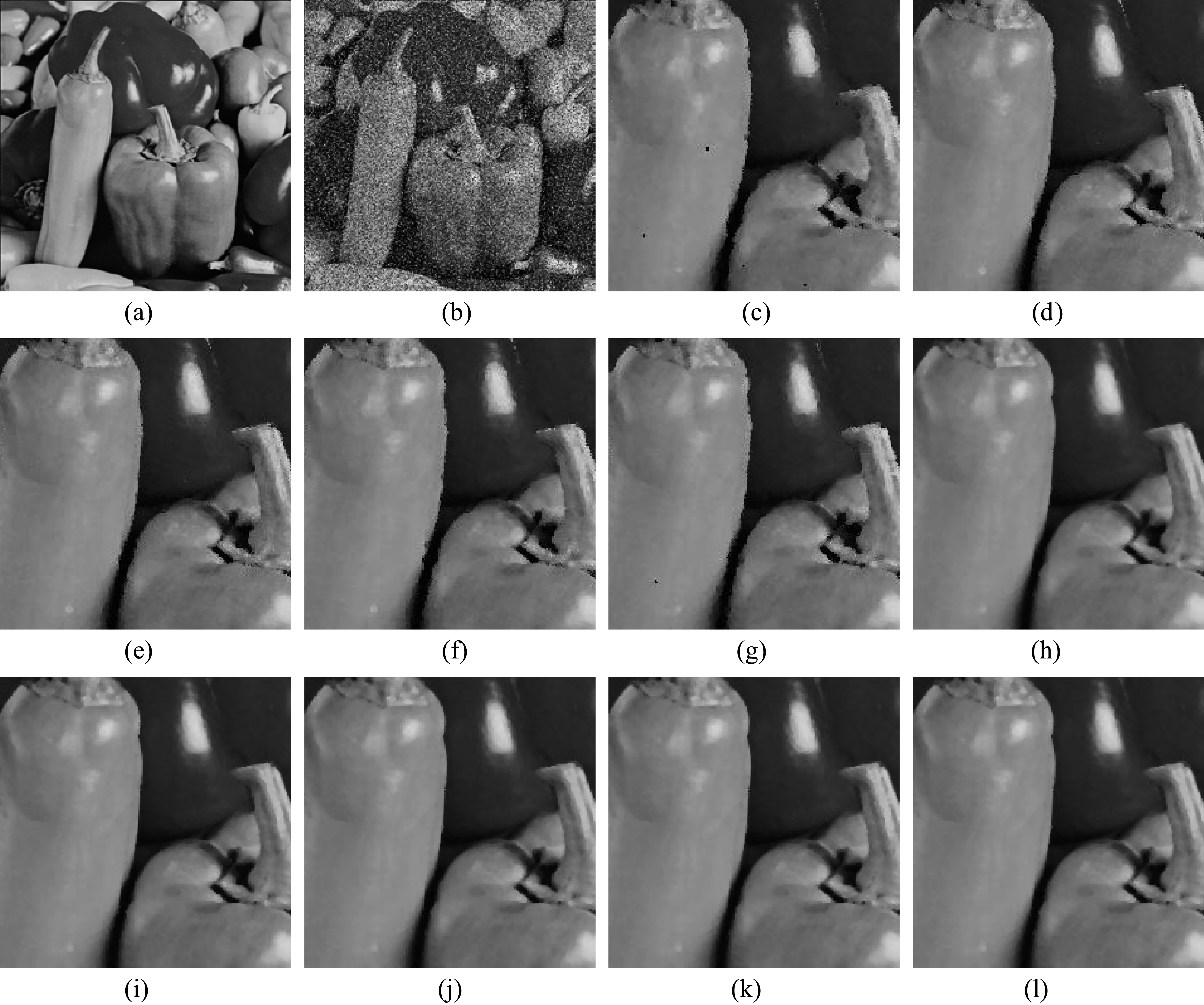
To evaluate the filtering quality two aspects are considered. The first one, is related with the performance of noise suppression and is evaluated using the peak signal-to-noise ratio (PSNR) [4, 25]. The second one, quantifies the fine detail preservation and is determined by the mean absolute error (MAE) [25]. Both criterions are given by next expressions:
where, MSE is the mean square error and can be determined as:
where,
After analyzing the simulation results summarized in Table 3, we can observe that in the PSNR (dB) judgment standard, the performance of our proposed method considering all influence functions was better than all comparative methods. In detail, the highest PSNR values were obtained when was evaluated the Hampel’s Three Part Redescending influence function, followed it by Insha, Simple Cut, Tukey Biweight and Andrew’s Sine. It should be highlighted that all comparative methods had a high performance; especially the Recursive and Adaptive Median Filter, since its skills to remove salt and pepper noise are nearly alike our method, when was evaluated whit the Andrew’s Sine influence function. On the other hand, the preservation of details was quantified by the MAE metric, in Table 4 are listed the results obtained. On the basis of these results we reaffirm the capacity of our proposal, because the lowest values were those obtained when the Hampel’s Three Part Redescending influence function was used into our scheme. An argument to justify its best performance is the fact that the pixels falling in the central region (that goes from
Baboon images rendered by the proposed and competing algorithms: (a) original noise-free image, (b) 50% noise corrupted; (c) ETSS, (d) REMF, (e) RAMF, (f) NLM-DBUTM, (g) IAFF, (h) MRME
Graphical representations of the comparative PSNR and MAE results are depicted in Figs 1 and 2, respectively. Both illustrations reveal that the suggested scheme has a steadier performance than all comparative methods, regardless of the influence function evaluated into the Redescending M-Estimator. In addition, it can be seen that the efficiency of our proposal decreased proportionally when the noise density increased. The complexity of the analyzed images has a strong influence on the performance of all methods, this can be verified simply by analyzing the PNSR results obtained on Lena and Baboon images, since there exists a difference between 2 and 5 decibels in measurements.
Lena images rendered by the proposed and competing algorithms: (a) original noise-free image, (b) 70% noise corrupted; (c) ETSS, (d) REMF, (e) RAMF, (f) NLM-DBUTM, (g) IAFF, (h) MRME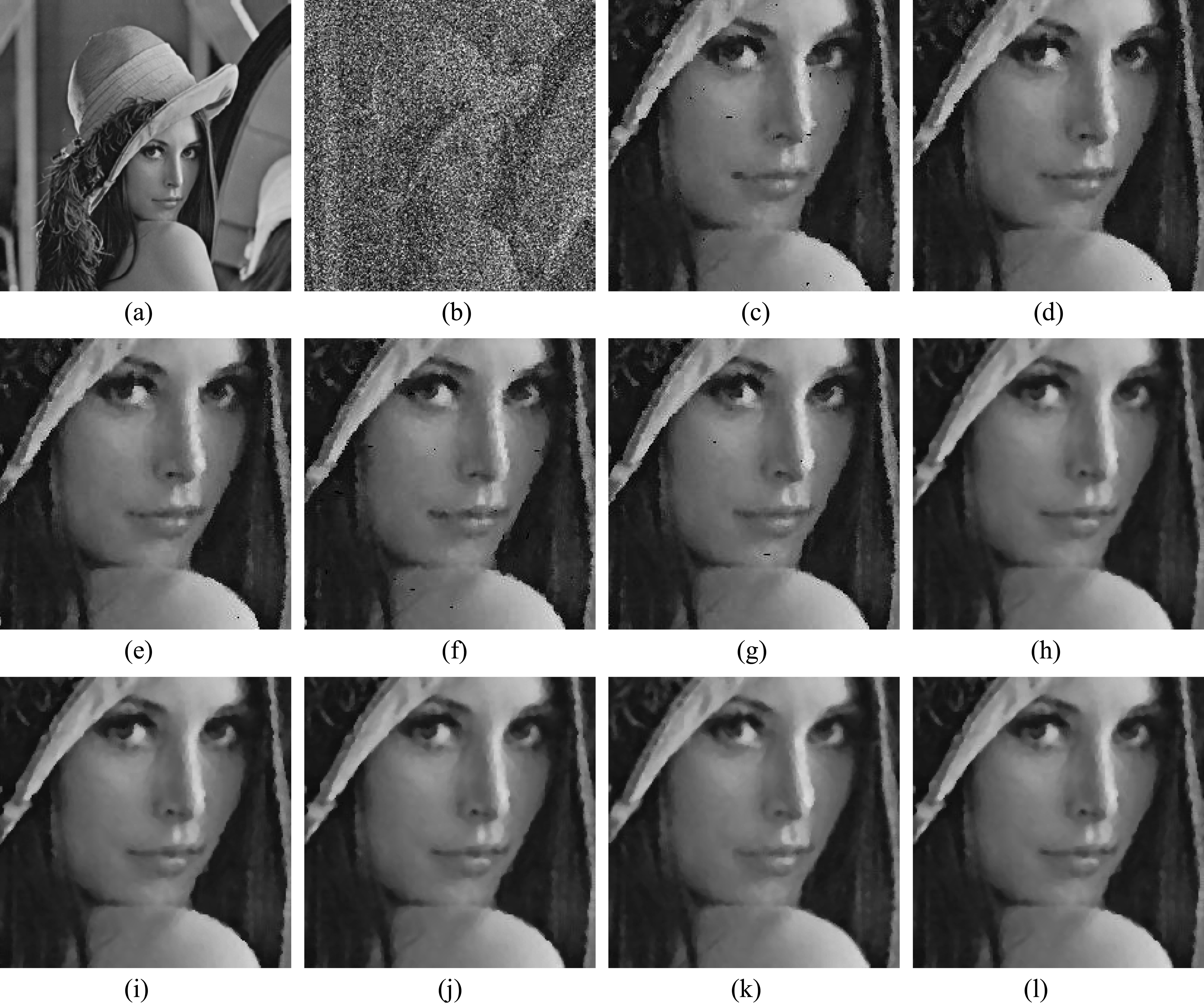
Besides the quantitative evaluation described in previous paragraph, a qualitative evaluation is necessary since the visual assessment of the processed images is ultimately the best subjective measure of the effectiveness of any method. For this purpose, the images Peppers, Baboon and Lena were considered to illustrate the noise suppression capability as well as the details preservation. In order to view the details, a zoomed-in section of each image restored is displayed in each figure.
In the first instance, the Peppers test image was corrupted with a density 30% of salt and pepper noise, the results obtained are depicted in Fig. 3, the visual inspection reveals that all algorithms have the capability of noise suppression; however, the proposed method has greater detail preservation than all comparative methods.
On the other hand, when the Baboon image was corrupted by a 50% of impulse noise, some comparative methods reduced their performance, since they allowed to some impulses remain after the suppression process, it can be seen in Figs 4(c), (d), (f) and (g). In contrast, our proposal and the REMF method were able to remove successfully the impulses, such as it is shown in Figs 4(d), (h)–(l). It is obvious that the proposed method has the excellent ability of noise attenuation because there is not impulse noise left in the restored image.
Figure 5 exhibits the restored images when Lena image was corrupted with 70% of impulsive noise. As we see it, all comparative methods were unable to suppress the noise; besides, they damaged the edges of the images filtered. In their own part, all influence functions evaluated in this study allowed our method to remove the salt and pepper impulses; however, only the Hampel’s Three Part Redescending influence function (MRME
Finally, numerous simulation results presented in this article show that the proposed method provides significantly good results in the testing images corrupted by different percentages of impulse noise, and outperforms the other conventional filters under consideration.
Conclusions
We introduced a scheme based on robust estimators to suppress Salt and Pepper noise in grayscale images. The proposed method not only achieved better noise suppression results than all comparative schemes, but also had better details preservation; both abilities were verified by quantitative and qualitative results obtained by extensive simulations. Looking at the detail, the best performance was obtained when the Hampel’s Three Part Redescending influence function was evaluated into our Median Redescending M-Estimator proposal, due this influence function has more control on the contribution of each pixel. The only drawback of our scheme is its time processing, it takes from 4 to 6 seconds denoising an image with a size of 512
Footnotes
Acknowledgments
The authors are grateful with the editor and with the reviewers for their valuable comments and insightful suggestions, which can help to improve this research significantly. The authors thank the Centro Nacional de Investigación y Desarrollo Tecnológico (CENIDET), Tecnológico Nacional de México (TecNM) and CONACYT for their financial support.