
Abstract
The problem of data association for tracking multiple targets based on using the ship-borne radar is addressed in this study. A robust fuzzy density clustering algorithm is proposed, that contains three steps. At first, a customized form of adaptive density clustering is used to determine valid measurements for each target’s state. In the second step, the degree of fuzzy membership for each valid measurement is determined based on the maximum entropy approach. At the final step, the measurements with a maximum degree of membership are used for updating the position of the targets. The proposed approach does not require gating techniques and led to the reduction of steps in comparison with other data association methods. In addition, the effect of ship movement in the performance of the tracking filter, based on the adaptive extended Kalman filter (AEKF) was studied. The efficiency and effectiveness of the proposed algorithm are compared with the nearest neighbor (NN) with Mahalanobis distance and Fuzzy nearest neighbor (FNN) methods. The results demonstrate the main advantages of the proposed algorithm, including its simplicity and suitability for real-time target tracking in cluttered environments.
Introduction
Data association (DA) is a crucial step in the target tracking systems, which aims to relate the correct measurements to the targets [1, 2, 3, 4, 5]. The presence of unwanted reflections at different clutters, false alarms due to the noise in the environment, and electronic countermeasures (ECM) resulted in receiving enormous measurements by radar decrease the authenticity of measurements. Different techniques of signal processing such as Electronic Counter-Counter Measures (ECCM) and data association at the level of data processing were presented for solving the above-mentioned problems [3]. At the level of data processing, valid measurements were determined using validation gate and their allocation to the current targets by data association methods.
In recent decades, many methods were presented for solving the problem of DA that can be divided into two groups of nearest neighbor (NN) and all neighbors (AN) [6]. The nearest neighbor association technique uses the nearest measurement to the predicted position of targets for updating their next position. Using only one measurement leads to the simplicity of tracking systems. Nearest neighbor filter (NNF) and suboptimal nearest neighbor (SNN) are considered as two basic techniques based on the NN strategy, that work based on selecting the measurement near the predicted position of target and measurement with the most probability [2, 6, 7].
AN data association techniques use all valid measurements determined by the validation gate for updating the position of targets. Multi hypothesis testing (MHT) provides the most optimal solution for multi-target tracking systems. MHT keeps all possible association hypotheses relevant to measurements and posterior probability based on Bayes’ theorem. This method is known as a theoretical optimal method with a high volume of computation [1, 6]. Probabilistic data association (PDA) and joint probabilistic data association (JPDA) are the other pseudo-optimal techniques based on ANs for solving the problem of data association in single-target and multi-target tracking systems [7]. These methods use a combination of valid measurements for updating the next position of the target. The computational load of JPDA is considerable in comparison to MHT. However, some techniques were presented for reducing computational overload [7, 8, 9]. The computational cost of DA techniques is the main concern of studies in recent years. Accordingly, fuzzy clustering-based DA techniques are highly considered. An adaptive density-based fuzzy clustering for solving the DA problem that does not need the gating for the elimination of invalid measurements is developed in this paper.
The remainder of this paper is organized as follows. Section 2 presents related works. A brief introduction of AEKF is described in Section 3. Section 4 discusses our proposed method named as density fuzzy nearest neighbor (DFNN). The simulation results, performance comparisons, and computational load are presented in Section 5 and the conclusions are provided in Section 6.
Related work
In recent years, highly efficient DA methods based on soft computing were presented for solving the data association problem in multi-target tracking systems [3]. Data association methods based on soft computations can be classified into fuzzy logic, artificial neural networks, and evolutionary algorithms [3, 11, 12]. Besides, for using the probability rules, the fuzzy-based data association methods with very high performance were introduced for solving the DA problem in multi-target tracking systems. As shown in Fig. 1, these methods can be further classified into three sub-groups of DA based on fuzzy inference, fuzzy clustering, and hybrid. DA methods based on fuzzy inference used the fuzzy rules for determining and relating the measurements to targets. The increasing number of targets in scenarios with crowded environments leads to exponential growth of fuzzy rules and inefficiency of DA methods based on fuzzy inference. On the contrary, using the fuzzy membership degree resulted from fuzzy clustering was highly considered for determining the effect of valid measurement and updating the next position of targets [2, 3, 13, 14, 15, 16].
Classification of DA methods based on soft computing.
The approach of using DA based on fuzzy logic was developed by Smith [17], which was used the membership degree of measurement for a case that the number of targets is known and predefined. Lianqun et al. [18] presented a DA method based on fuzzy logic using the maximum entropy fuzzy clustering for multi-target tracking systems. Zhang et al. [19] evaluated the development of the data association method using the maximum entropy fuzzy clustering based on particle filter (PF). The nearest neighbor DA was proposed by Aziz [6] using the fuzzy clustering for creating the probability instead of using the distance criterion. In FNN, fuzzy clustering was used for associating the measurements to tracks. Finally, the measurement with a maximum weight of fuzzy correlation was selected to update the positions of targets. Fuzzy approach was conducted based on the intuitionistic degree of fuzzy membership for reconstructing the probability of simultaneous association. Fuzzy clustering was presented in combination with fuzzy rules to solve the problem of DA in multi-target multisensory environments [20]. In their proposed method, the membership degree of measurements was determined by recursive fuzzy clustering and fuzzy rules in relation to the current targets, and then the most probable measurement was selected based on the nearest neighbor DA for updating the position of targets. Satapathi and Srihari [2] have suggested the joint probabilistic data association algorithm based on rough fuzzy clustering to improve the performance of multi-target tracking in cluttered environments. The fuzzy recursive least squares probabilistic data association filter for tracking a single target is developed by Li et al. [21]. In their approach, a fused measurement is created based on probabilities’ measurements.
Pseudo-optimal DA methods were presented based on a neural network for multi-target tracking systems were not welcomed due to the need for many neurons and the training phase [14, 15]. In the last group of methods based on soft computation, DA methods based on particle swarm optimization (PSO) and genetic algorithm (GA) are optimization algorithms that were presented by Stapathi and Srihari [3]. In their proposed method, the optimization algorithms were used for fuzzy clustering on valid measurements. Unlike the DA methods based on fuzzy clustering (FCM), the placement on local minimums was avoided in their proposed method by minimizing the distance between cluster centers and measurements. However, due to the need of optimization algorithms to iteration, it seems that the DA methods based on optimization needs to more computational resource in comparison with other methods.
In tracking systems, valid measurements have to be determined properly before the DA process. Usually, gating is used to determine valid measurements. So, DA efficiency is directly dependent on gating results [24]. In this sense, we can say that DA is highly coupled with the determination of the valid measurement. To tackle this problem, a new fuzzy nearest neighbor DA is proposed. Our approach is based on the use of density-based clustering and the maximum entropy fuzzy approach. The density-based clustering approach is one of the most commonly used clustering methods in data mining. The lack of need to know the number of clusters as priori, one scan, noise management, and ability to discover the clusters with the desired form are considered as the most important features of these clustering methods [25, 26, 27, 28].
The proposed approach facilitates selecting valid measurements and does not need to gating, which reduces computational overhead. Also, unlike the fuzzy-based DA methods, it does not have iteration and avoids placing on local minimums. The proposed method was used in combination with the AEKF algorithm for tracking the air targets based on ship-borne radar. Finally, the main contributions and significant features of the developed method can be summarized as follows:
It does not require a gating technique for the determination of valid measurements. It does not need to know the probability of detecting and false alarm as priori. The computational cost of the proposed method in the worst-case scenario is quadratic. It can integrate with other data association techniques.
In [29] we developed a robust fuzzy density clustering to solve the DA problem, that it works based on AN approach. Actually, in the previous study [29], a general framework of fuzzy density clustering to solve the DA problem is proposed. In contrast, this present study proposed an extension of the previous DA method in combination with the AEKF algorithm for air targets tracking, which works based on the NN approach. Also, we extended an adaptive fuzzy density clustering for solving the track association problem in distributed multi-sensor tracking systems [30]. In distributed tracking systems, each sensor estimates the target’s state independently and sends them to the fusion center. In the fusion center, similar tracks must be determined and combined, where the action of determining similar tracks is known as track association.
The main objective of this section is to briefly explain the formulation of measurement association problem to track the air targets by ship-borne radar. Generally, multi-target tracking contains three phases of 1) beginning the track, 2) maintaining the track and 3) removing the track [31]. DA with tracking filter was in charge of maintaining the track. The derivatives of Recursive Bayesian filter such as Kalman filter (KF), extended Kalman filter (EKF) and particle filter and were used as the main tracking filters in tracking systems [12, 15]. KF was used for tracking the targets with linear movement. In order to track the targets with nonlinear (maneuvering) movement, the tracking filters such as EKF and unscented Kalman filter (UKF) were used. By considering the movement of the ship and its effect on the measurements, the EKF comparative model (AEKF) was used and examined in the current study as the tracking filter [32]. We tried to set up the simulation condition close to published researches for better comparability. Therefore simulation condition is similar to the paper of Mar at al. [32].
Let assume the movement equation of targets as follows:
where
In this matrix,
The azimuth angle of the target
Polar angle of the target
Let assume mapping
Measurement signals of the target
where
where the measurement matrix is as follows:
Based on Eq. (8), the measured equation can be redefined as follows:
where
Process noise and measurement noise are assumed uncorrelated.
By applying the effect of ship movement on the process noise and measurement noise, the covariance matrix of process noise and measurement noise are described as follows:
where
where
Suppose a measurement set
Our proposed method requires setting MinPts and the Eps parameters for measurements clustering, which respectively represent the minimum number of points in the cluster and the maximum radius of the neighborhood. We denote
Result of DFNN with two targets and 10 received measurements.
In the second part of the proposed DA method, the fuzzy membership degree of each clustered measurement was determined to the related target based on the maximum entropy as follows:
where
In [11, 12], a modified version of the maximum entropy fuzzy clustering method is introduced for multi-target tracking which is used in our proposed method. In this approach, the joint probabilities
where
where
Fuzzy density nearest neighbor data association algorithm.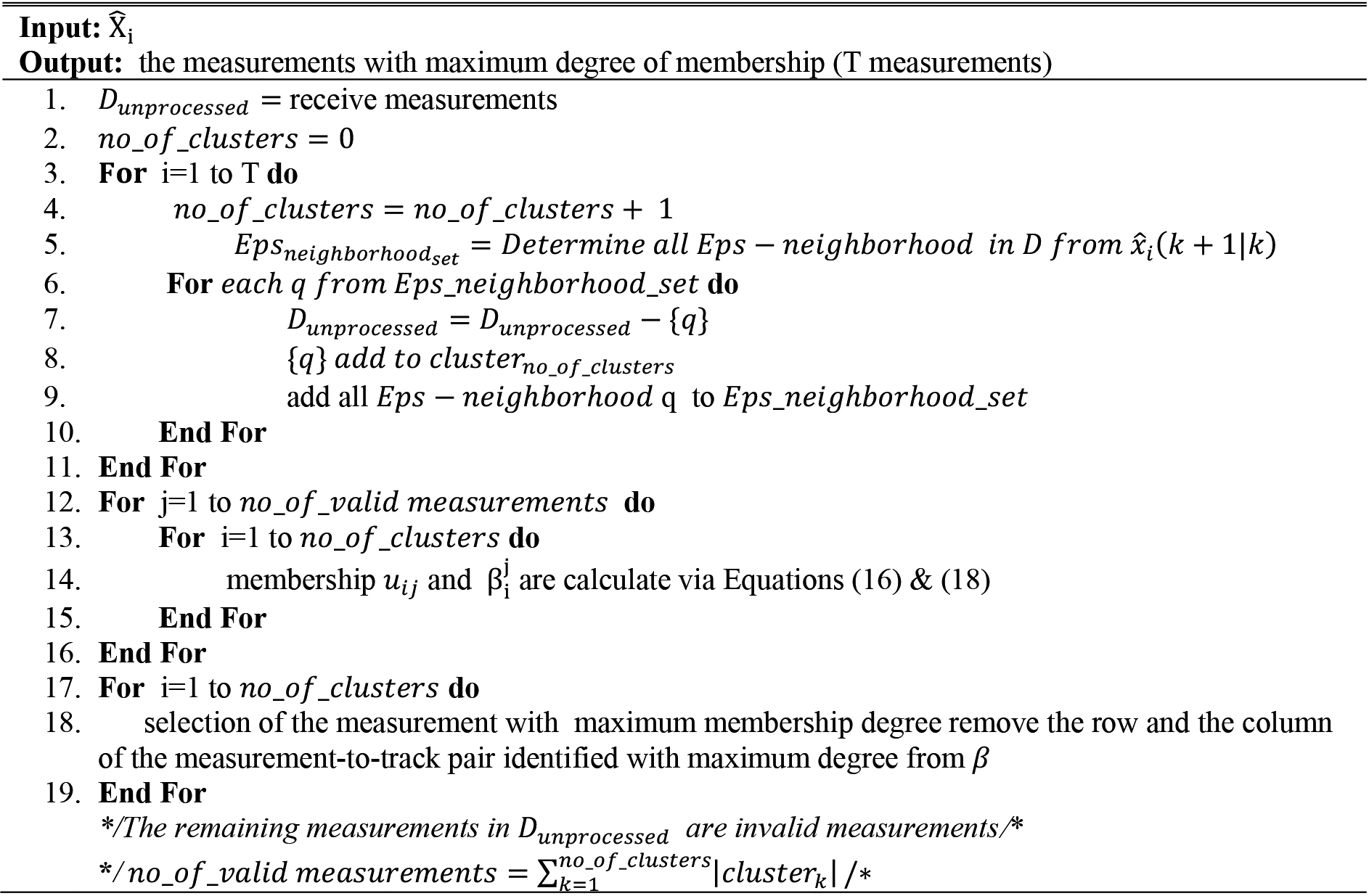
Two scenarios including the linear crossing targets and circular maneuvering targets were studied for evaluating and comparing the proposed method. Both scenarios were studied in two modes of fixed and moving ships. In all simulations, the clutter model is assumed to be spatially Poisson distributed with known parameter
The error statistics RMS position error was used as the comparison criterion.
where (
The parameters MinPts, Eps, and
In the first scenario, three linear crossing targets were considered. The linear target transfer matrix is considered as Eq. (2). The primary position ((
In the second mode of this scenario, the linear movement of the ship was considered in the axis direction with a speed of 20 m/s. The equation of ship’s linear movement was considered as follows [21, 24]:
where
True and estimated trajectory using DFNN of experiment 1.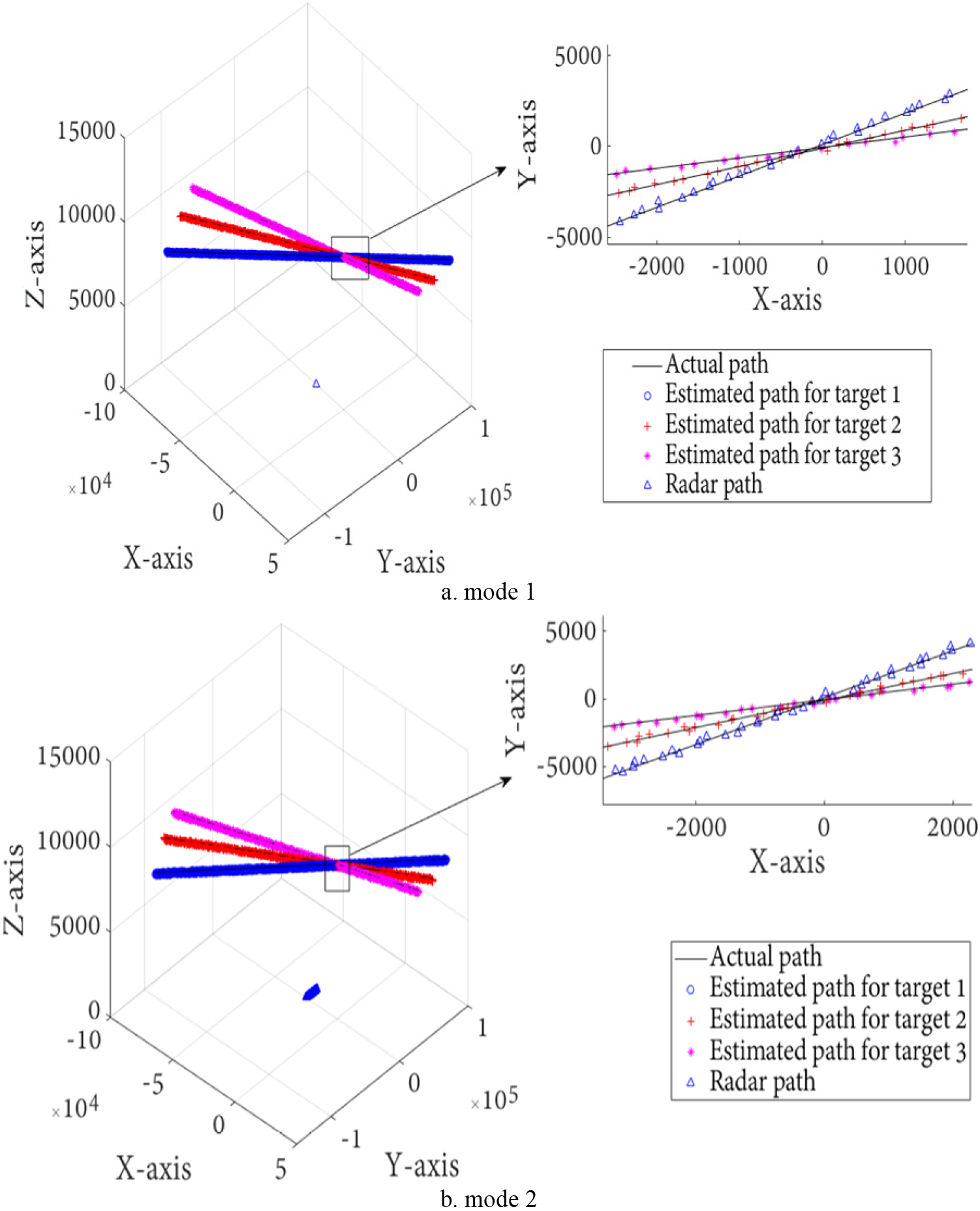
Figure 5a and b display the RMS position error of simulations results of our proposed method, FNN, and NN with Mahalanobis distance methods. Comparisons were made on two different dimensions: a) two different levels of clutter in the environment and b) two modes of fixed and moving ship-borne radar.
Comparison performance of position RMS position error of experiment 1.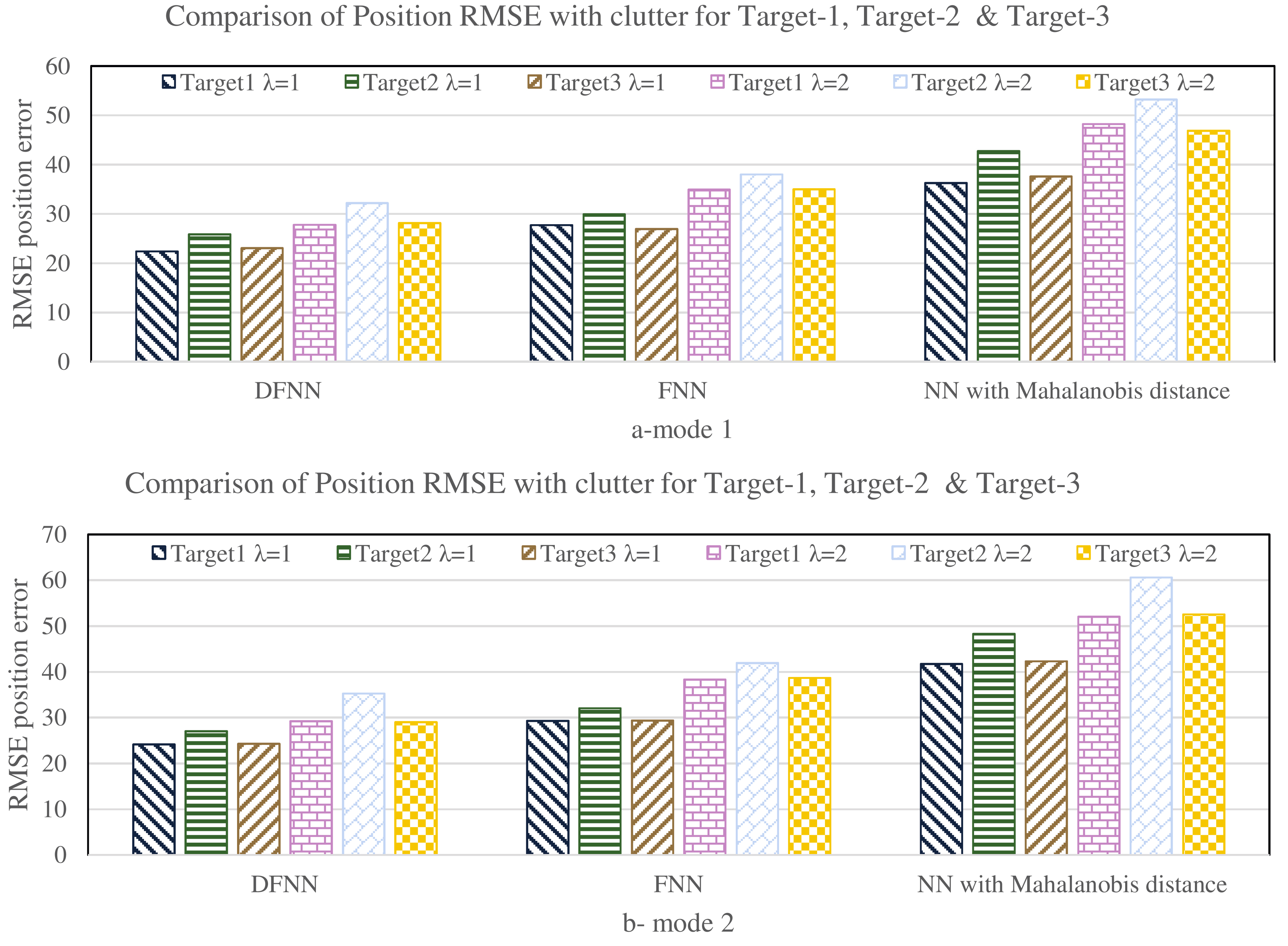
According to these figures, DFNN’s average performance is improved compared to the FNN and NN with Mahalanobis distance methods. Also, we can see that target 1 and 2 have the least and the most RMS position error, respectively. Moreover, clutter increase makes RMS position error value worst for all methods. As shown, the higher efficiency of the proposed method in both levels of clutter was observed by comparing the studied association methods. Furthermore, the comparison of Fig. 5a and b indicated the effect of ship movement in the performance of tracking system precision. The figure shows a decrease in tracking accuracy of the proposed method in case of ship movement as 9.82% in comparison with fixed ship (radar) mode.
In this scenario, two circular maneuvering targets were considered with a movement tracks close to each other. In the simulation of scenarios, the circular trajectory equation was considered as follows:
where
This scenario was evaluated in two modes of fixed radar with position (5000, 5000) and moving radar based on the movement Eq. (23) in direction y from position (5000, 5000) with speed of 20 m/s). It was assumed that the target 1 and 2 flies at the height of 9100 and 9000 meters, respectively in the XY plane. Figure 6a and b illustrate the real and estimated tracks of targets in the two above-mentioned modes.
True and estimated trajectory using DFNN of experiment 2.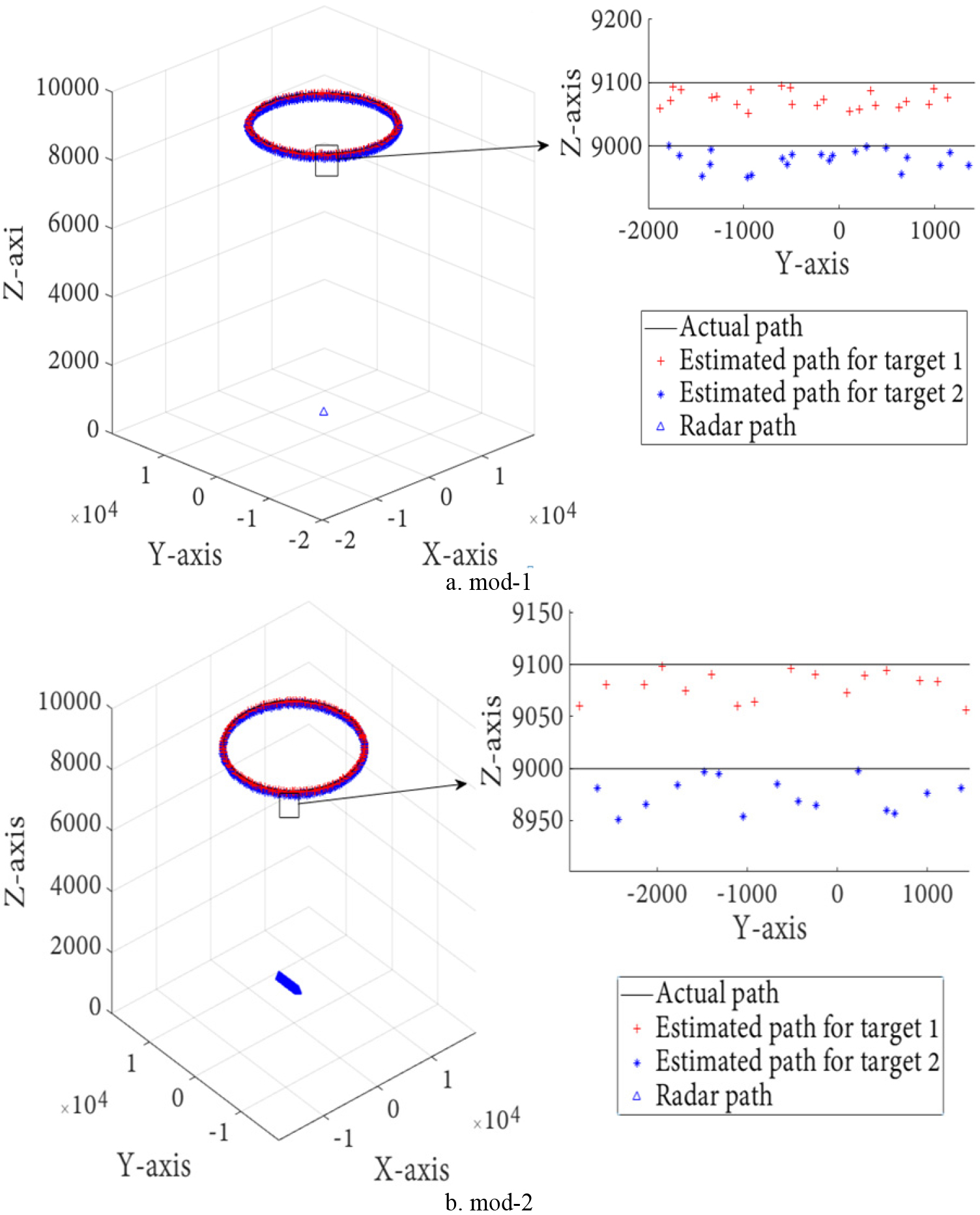
Figure 7a and b display the RMS position error of simulations results of our proposed method, FNN, and NN with Mahalanobis distance methods. Comparisons were made on two different dimensions: a) two different levels of clutter in the environment and b) two modes of fixed and moving ship-borne radar. By comparing results, it is evident that DFNN average RMS position error is decreased compared to other techniques. Also, we can see that the RMS position error of both targets are close together in all situations (in two modes and two clutter levels). The RMS position error value of DFNN for target 1 is 16.28% and 40.5% less in the first mode (fixed radar) and 12.14% and 48.65% less in the second mode in comparison with FNN and NN with Mahalanobis distance methods, respectively. Moreover, the RMS position error of position for the second target based on the proposed method is 15.48% and 39.53% less in the first mode and 10.6% and 48% less in the second mode in comparison with FNN and NN with Mahalanobis distance methods, respectively. This improvement has a direct relationship with the increase in the environment clutter level. In fact, the proposed method is more flexible in comparison with two other methods, under the increase of clutter in the environment. As is shown in Fig. 7a and b, the value of RMS position error increases by increasing the clutter level and its value for the proposed method is less than the compared methods.
Table 1 shows the average RMS position error for different speed levels for the DFNN, FNN, and NN with Mahalanobis distance techniques. The results depict that the speed of radar has a direct relationship with RMS position error values of targets. Moreover, the DFNN has best results compared to other techniques. Further, DFNN has the lowest error rate while NN with Mahalanobis distance method has the highest error rate.
The effect of the speed of the moving radar on the estimation accuracy
Comparison performance of position RMS position error of experiment 2.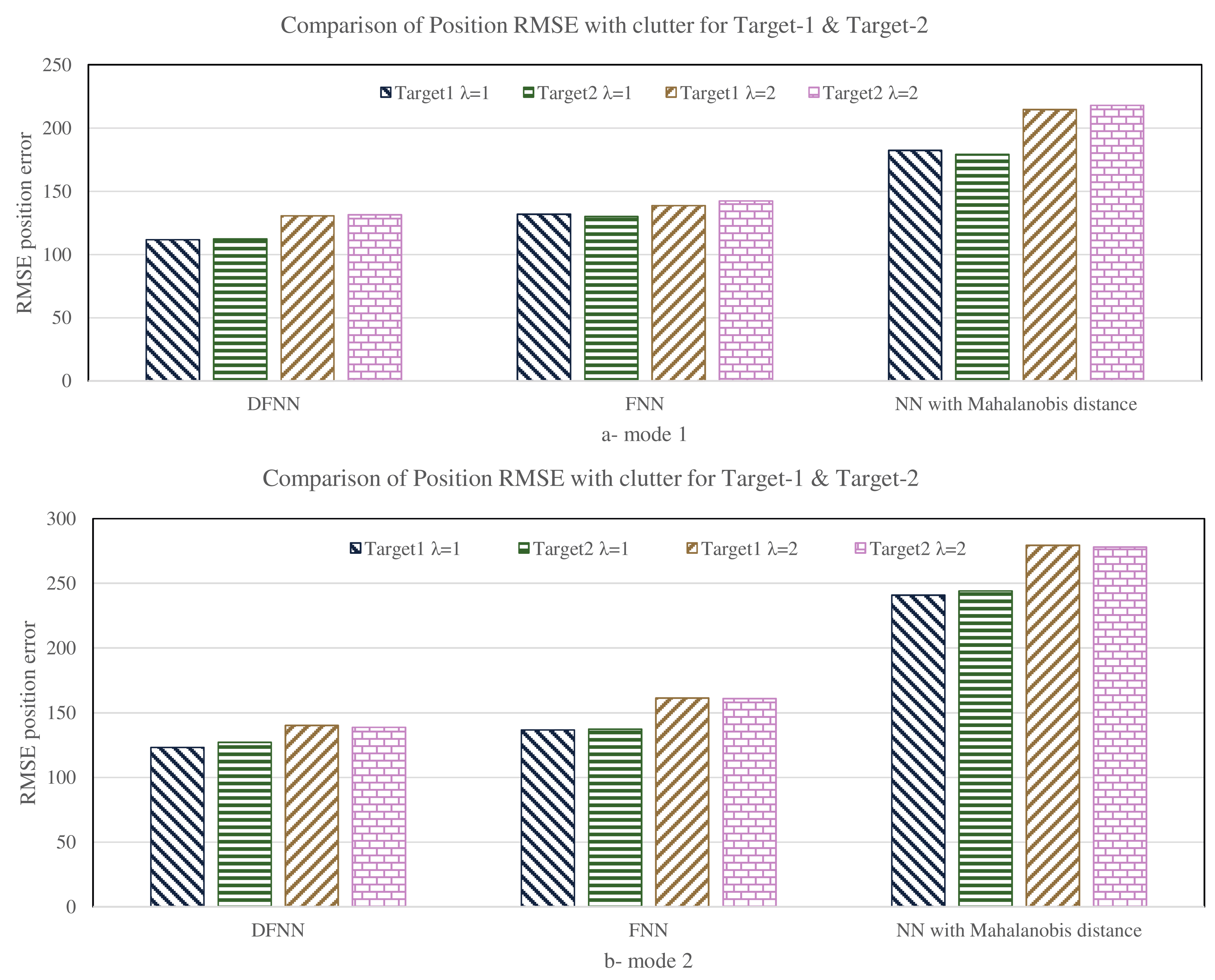
As shown in Fig. 3, the proposed method consists of three main phases, 1) clustering of measurements, 2) determining the membership degree of valid measurements and 3) selection of the measurement with maximum membership degree. Let assume that
Determining the membership degree of tracks is accomplished within two nested for loops, which outer loop repeats
Conclusions
A joint valid measurement detection process and DA method for multi-target tracking in a crowded environment named DFNN is proposed in this paper. The density clustering approach is considered for this joint process and the maximum entropy algorithm is used to obtain the fuzzy degree of valid measurement. Also, the proposed method was used in combination with the AEKF filter for tracking the air targets on ship-borne radar. Besides, based on the proposed approach, gating is not required for determining the valid measurements due to the use of density-based clustering, which led to the reduction of time overhead and its computational complexity, compared to other methods. The data association matrix for the whole tracking and valid measurements was created using the maximum entropy. Finally, the measurement with the maximum membership degree was selected for updating the position of targets. The effectiveness of the proposed DA approach in multi-target tracking was demonstrated by computer simulations. According to the results, the proposed approach outperformed the other filters and is appropriate for real-time applications. The results clustering phase of the proposed approach can be used separately in other DA approaches as a valid measurement detection process.