In this paper, an optimal vibration control strategy for solving the robust active suspension systems with actuator delays as well as uncertainties in a light rail vehicles (LRVs) is investigated. A 9-DOF multibody dynamic model of a three-car train set with the active suspension systems is presented; in addition, the external perturbation from track irregularity, vehicle body mass uncertainty, such as the number of passengers, and time-delayed actuator force are simultaneous considered to guarantee robust performance of the proposed systems. By using the Bellman’s optimality principle for the zero-sum (ZS) game and Razumikhin theorem, the general robust control problem can be equivalently converted into an optimal control problem with the amount of matched uncertainties involved in the performance index. Moreover, sufficient conditions are derived under which not only the uncertain LRVs dynamical systems and time delays in the control input can achieve asymptotic stability, but also acquire the guaranteed level of performance for regulation. Extensive simulations show that the proposed active suspension systems can significantly suppress bodywork vertical acceleration, and ride comfort is improved when LRVs runs onto irregular tracks.
Nowadays, many countries are facing serious traffic issues, including significant traffic congestion, pollution, and high accident rates in road traffic, which are ascribed to the rapid increase in motorization. Light rail vehicles (LRVs) has now been proved to be an efficient, economical, reliable and safe transportation method. However, track disturbance during increasing cruising speeds will amplify the train’s vibrations significantly, which will cause an obvious decrease in vehicle ride comfort and stability. Hence, vibration is an important issue in LRVs from the point of both passenger comfort and track impact. In recent years, many studies have focused on passive [1], semi-active [2, 3], and active suspension [4, 5] systems design to suppress vertical vibration from track roughness of railway vehicles and to improve ride comfort and vehicle maneuverability. However, passive suspension systems is not only necessary to increase the weight of the whole systems, but also to optimize a certain frequency range to yield satisfactory performance. Therefore, combining active vibration control mechanism with advanced control algorithms as active suspension systems becomes necessary, especially in LRVs because these have better performance, lower power requirements and less expensive hardware than passive suspension.
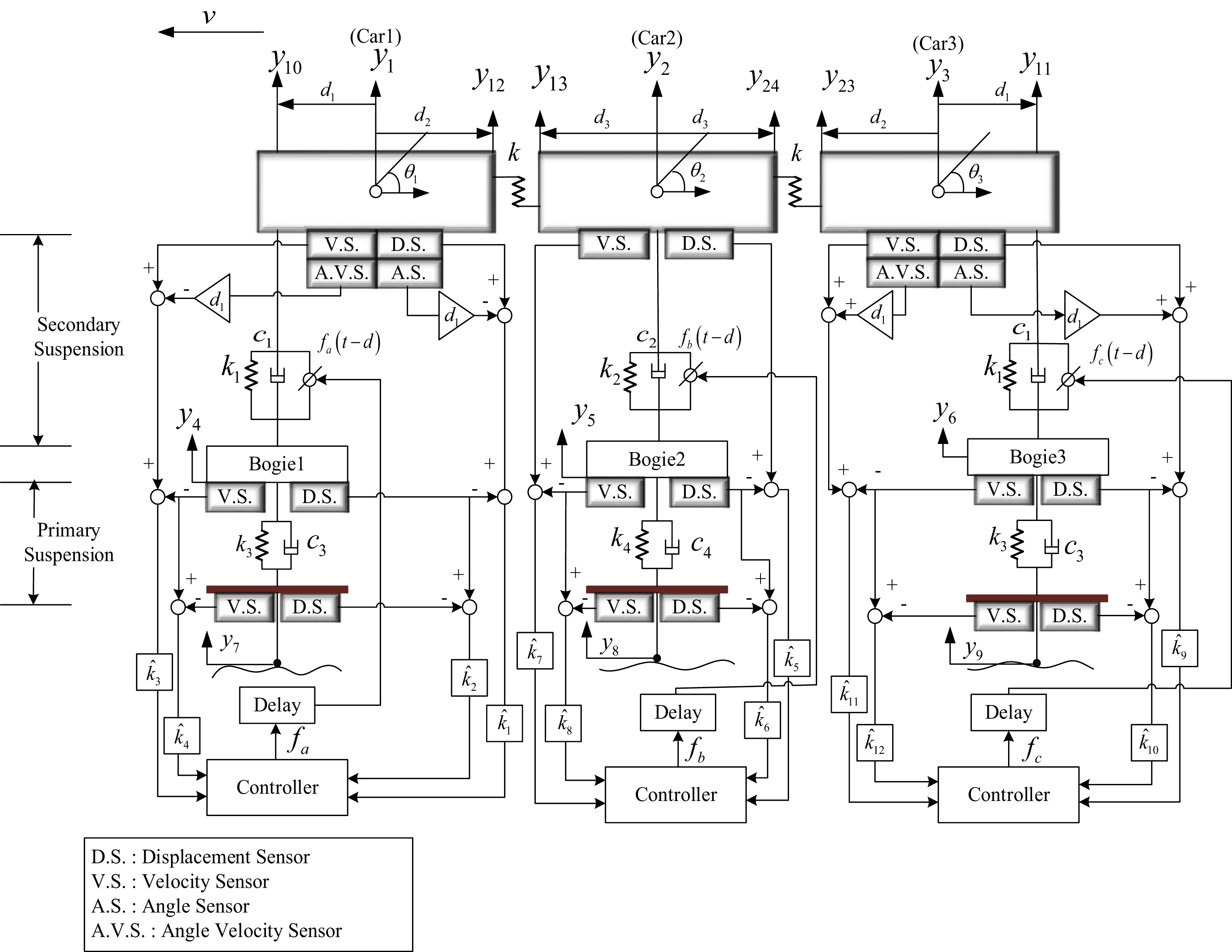
Active suspension systems of LRVs model with actuator delays.
A number of studies have focused on various advanced active suspension control technologies, such as skyhook and groundhook control [5], Fuzzy logic control [6], adaptive control [1, 7] etc. However, actuator time delay for active suspension design of LRVs are often encountered in the practical controller procedure, especially in the digital controller, as it implements the calculations associated with intricate control law, and in sensors and actuators hardware, such as hydraulic actuators or electro-magnetic actuators where the delays are taken by the actuators in order to strengthen the required control force. The issue of robust control design to handle model uncertainties with time-delays has attracted a considerable amount of interest in recent years [8, 9, 10, 11]. The corresponding methods usually utilize the Lyapunov Krasovskii functional [10] approach, and sufficient conditions are derived by solving either linear matrix inequalities (LMI) [11, 12] or algebraic Riccati equations [11]. Thus, the problems of the stabilization of uncertain systems with time-delay and exogenous disturbances can be effectively solved. However, applying these schemes to solve the robust stabilization problem is relatively complicated. Moreover, focusing merely on the stability issue is not enough for practical applications. Hence, the robust stabilization problem for perturbed time-delay systems becomes an attractive research subject.
In this paper, we simultaneously consider the vehicle body mass uncertainty, actuator delays and track disturbance in the control law design process and design a realizable controller that can ensure the stability robustness and performance reliability of LRVs’ active suspension systems. The present approach makes no attempt to solve the robust control problem for active suspension design of LRVs with actuator delays and time-varying track irregularity directly. The feedback stabilizing controller is only found via the Riccati matrix equation; therefore, it is much easier to handle than to deal with the robust control problem directly. In addition, the resulting feedback control law can ensure asymptotic stability and performance robustness in terms of a linear integral-quadratic cost criterion for the active suspension control design of LRVs. Based on optimality principles of classical game theory and Razumikhin theorem [12, 13], the proposed robust active suspension systems of LRVs can achieve an optimal tradeoff between ride comfort, disturbance rejection, and robust stability. Extensive numerical simulations show the efficiency of the proposed approach; moreover, the designed controller can achieve better performance than the passive suspension.
LRVs dynamic model and problem description
Light rail vehicles has currently developed to provide a convenient public transportation for use in major cities in Taiwan. LRVs contains many subsystems such as suspension systems, brakes system, engine system and air conditioning systems etc. The main purpose of suspension systems is used to curb the vibration of vertical directly. In order to describe the vertical dynamic of LRVs which travels at a constant speed along an uneven track, a 9-DOF multibody dynamic model of a three-car train set with the LRVs’ suspension prototype [14] is utilized, as represented in Fig. 1.
Mensuration of the absolute displacements, velocities, angles and angle velocities with relative motion can be implemented on a digital signal processor and devices, such as linear variable differential transformers (LVDT) as displacement sensor (D.S.) and velocity sensor (V.S.) and rotational variable differential transformers (RVDT) as angle sensor (A.S.) and angle velocity sensor (A.V.S.), are placed between the carbody and bogie, as well as which between the bogie and axel to measure the required relative displacements, velocities angles and angle velocities, respectively.
When LRVs travels on an irregularity in the rail surface, the vibrations are generated by the interaction between vehicle and track. In order to achieve proper stability and good ride comfort while travelling for the passengers, the addition of active control forces are placed in parallel to secondary suspensions between carbody and bogie of LRVs and the actuator’s delay is also considered as a part of the time delay in the control loop.
The dynamic equations of motion for LRVs’ active suspension systems with actuator delays can be modelled as
where
is the state vector;
is the control force vector;
is the external excitations vector from the track random irregularity.
is a positive value for delay time and a real actuator is therefore required to consider a certain time delay; These corresponding matrices
,
,
are the inertia, damping, stiffness matrices, respectively, obtained from [14]. In addition, the matrices
and
define the locations of control forces and excitations with appropriate dimensions, respectively.
where
,
and
;
denote the time-delayed actuation forces of the secondary suspension. To achieve the best ride comfort, it is necessary to cancel the forces caused by the passive springs and dampers of secondary suspension. Thus, the actuation forces are expressed as
where
are the active control forces of LRVs’ suspension systems.
are disturbances from the track random irregularity, which represents the roughness of a line is derived from the spatial power spectrum density (PSD) of the track vertical profile in [15].
To guarantee robustness with respect to uncertain system parameters, we consider the modeling uncertainty that comes from the change of passengers’ number. Thus, uncertain mass matrix is defined as
:
is the nominal inertia matrix of LRVs carbody mass;
is the uncertain part corresponding to changes of passengers. One can reasonably assume that
, where
denotes the Euclidean norm, and
can be approximated by
Thus, the corresponding state-space description of LRVs model can be derived as:
where
are
state vector,
is a continuous vector-valued function vector specifying the initial state, and
Clearly,
constitutes a controllable pair. According to Eq. (3), the uncertain matrices
,
,
can then be structurally decomposed by
where
,
,
,
,
and it is easily known that
. Moreover, we assume that the uncertain part is
, and
, where
represent the possible percentage change of passengers for each carbody mass.
By using a linear state transformation [16] the input-delayed system Eq. (2) can be transformed to the further state-space:
Assuming the input time-delay
, the natural logarithm
can be approximated by Taylor’s series expansion, which can be written as:
where
is a function of
and the past control action
for
, which the linear controller is applied
. In general, to solve the robust control problem with uncertain and input-delayed system Eq. (2) is rather difficult. To overcome the aforementioned difficulties, we utilize Bellman’s optimality principle and Razumikhin theorem to deal with the robust control problem, thus it can be equivalently transformed into an optimal control problem with the amount of matched uncertainties involved in the performance index.
Notation: For reduced system Eq. (2), the new state variable
is obtainable for measurement. Hence, the controller
is practically realizable.
Robust optimal controller design based on zero-sum game
In this paper, the robust control problem with simultaneously considering the external disturbances and uncertainties Eq. (2) is converted into an optimal control problem based on a zero-sum (ZS) game theory [17]. A zero-sum game is a minimax optimization problem, which the controller try to minimize the objective function under the worst possible disturbances.
A robust state feedback control law with external disturbances and uncertainties Eq. (2) can be equivalent to find an optimal feedback control law
for the following auxiliary system:
where
and
are the augmented control law, which mainly deal with the delayed term and matched uncertainties, respectively. In this paper, the objective is finding a control law
,
, such that the cost function given below is minimized.
where
Symmetric matrices
and
are the penalizing matrices for the final state, state, control vectors, augmented control vector, respectively. Matrix
is a non-negative function which characterizes the least upper bound of the uncertainties
and
is a non-negative function which characterizes the boundary of the external excitations from the track random irregularity.
where
denotes the Euclidean norm. In addition,
and
are the positive constants that serve as design parameters. Moreover, the weighting matrices
and
are respectively given by
where
is the
identity matrix. Namely, instead of solving the robust control problem directly, it can be transformed into an optimal control problem.
To prove that aforementioned approach is valid, the final state cost should be given in the following form
where
is assumed to be fixed, the initial state
is given and the final state
is free. Thus, by using the sweep method [17], let
Remark 1. In this paper, we simultaneously consider the control input
and the disturbance input
, in which the control input seeks to minimize the performance index and the disturbance input (a fictitious player) seeks to maximize it. Therefore, it is termed a zero-sum (ZS) game. The game has a unique solution if both players are at saddle point
; that is equivalent to the Nash equilibrium condition
holding for all policies
.
Theorem 1. Consider LRVs’ active suspension systems with external disturbance and uncertain described by Eq. (3). Suppose that there exists
and
satisfying Eqs (11) and (13) respectively;
and
is stabilizable, then the solution of the finite horizon optimal control problem exists and the feedback control, augmented control and disturbance policies based on stationary conditions are respective given by
where
is the unique solution to the following modified Riccati matrix equation
Proof In this paper, the objective of zero-sum game problem is essential to derive admissible feedback policies
and
, such that the cost in Eq. (3) associated the systems Eq. (3) is minimized. The result is the zero-sum game Bellman equation given in terms of the Hamiltonian function as
where
is a Lagrange multiplier. Based on Remark 1, the optimal control policy
and the worst case disturbance
should satisfies
and
. Therefore, the optimal control and disturbance policies are obtained
In addition, the augmented control policy
and
also can be derived as
According to Bellman’s principle of optimality [17] and setting
in Eq. (15), then the optimal control law can be found by Eq. (16). In addition, the co-state equation is
Substituting Eq. (15) and auxiliary systems Eq. (3) into Eq. (21), the Riccati matrix Eq. (3) can be obtained.
is a solution with final condition
for all
. By solving the above modified Riccati matrix Eq. (3), the optimal performance cost on
can be determined before applying the control law Eq. (16). This completes the proof.
Stability analysis based on Razumikhin theorem
Stability analysis consider effect from uncertain of passengers, disturbance from uneven track and actuator time delay, simultaneously. In this section, the Lyapunov theorem and Razumikhin theorem [12, 13] are utilized not only to analysis the asymptotic stability criteria for our proposed LRVs active suspension systems, but also to obtain the least upper bounds of the weighting matrices for the given performance index. To facilitate further description, some necessary mathematical preliminaries will be used in the proof of our main results.
Lemma 2 [18]. Let
and
be real matrices of appropriate dimensions with
. Then, for any matrix
and scalar
such that
, we have
Lemma 3 [19]. For all continuous differentiable function
in
, the following inequality holds:
Theorem 2. The Lyapunov functional for LRVs’ active suspension systems with uncertain and actuator delays in Eq. (2) is considered as
It is also assumed that there exist the constants
,
, and the delay
satisfying:
and
where
is obtained in Eq. (14), then the systems Eq. (2) subjected to the linear state feedback control, augmented control and disturbance policies described by Eq. (16) would be asymptotically stable.
Proof First, let the feedback control input, augmented control input and disturbance policies be expressed as
,
, and
, respectively. We aim to be verify that under the constraints specified by Eqs (4)–(4), the optimal controller Eq. (19) for the systems Eq. (3) is also a solution to the robust control problem. Namely, the closed-loop systems Eq. (2) would be asymptotically stable.
The Lyapunov function can be introduced as
Suppose now that
satisfies the Hamil- ton-Jacobi-Isaacs (HJI) equation [17], such that
where
and
.
Taking time derivative of differentiation of
along with the state trajectory, and the matched uncertainties in the form of Eq. (2), we obtain
where
and using Lemma 2, for
, then
where
. Furthermore, applying Lemma 1, we have that for any constants
and the inequality from Eq. (4) is equivalent to
It follows from Lemma 3 that the above inequality can be further written as
By using the above quadratic bounding functions and according to Razumikhin theorem, one may conclude the existence of the above inequalities Eqs (4)–(4) for all
, it follows that, if
is a sufficiently small positive real value, and let
, such that the left-hand side of Eq. (4) is smaller than
, then Eq. (4) further implies that
whenever
satisfies
Using the above Razumikhin derivative condition, we can conclude from Eq. (34) that
It is clear to prove that inequality Eq. (12) satisfies assumption of Theorem 2. This result can easily shows that the quadratic stability of LRVs’ active suspension systems with actuator delays as well as disturbance input under the linear state feedback controller Eq. (19). In other words, the systems Eq. (2) is also called asymptotically stable such that
as
. This proof is ultimately complete.
Remark 2. From Theorem 2, such as Eq. (34), it is clear that the penalizing matrices
can also be easily obtained as Eqs (11) and (13). Furthermore,
that is affected by the Riccati matrix Eq. (3) enables one to consider the effect of matched uncertainties.
Clearly, it is easily to know that the solution to the optimal control problem will be a certain solution to the robust control problem when choosing an appropriate cost function reflects the least upper bound of uncertainties and actuator delays. Thus, the resulting feedback control law can not only ensure asymptotic stability, but also achieve robust performance.
Simulation results
The LRV’s active suspension systems with actuator delays shown in Fig. 1 is considered as the model for verifying the proposed method. The nominal parameters of LRVs model are defined in [1]. To compare the proposed control effect with passive suspension, the irregular track profiles and different uncertainty are considered. The track irregularity vertical profile is characterized by a power spectral density (PSD) function in [15], and the profile parameters are given in Table 1.
The PSD model parameters of irregular track profile
Parameter
Value
Parameter
Value
500 cycle/s
70 km/hr
0.00045 in.
/cpf
25.77 cycle/m
0.0071 cpf
0.04 cpf
Furthermore, the actuator time delay is supposed to be
0.078 sec and the duration of simulations is set to be 10 sec. We also take into account the effect of passenger number [20] as the carbody mass uncertainty to verify the robustness of the proposed control approach. To illustrate the effectiveness of the proposed control approach, two different cases are carried out with LRVs active suspension systems.
Remark 3. According to many previous investigations on the subject [21], the range of actuator time delays is in the interval (15, 80) ms. Due to different transmission mechanism design; therefore, the total time delay of actuator is then defined 0.078 second.
Performance comparison of the active suspension and passive suspension with
10% uncertainty due to irregular track at LRVs speed of 70 km/hr.
Performance comparison of the active suspension and passive suspension with
30% uncertainty due to irregular track at LRVs speed of 70 km/hr.
Performance comparison of the active suspension and passive suspension with
10% uncertainty due to irregular track at LRVs speed of 50 km/hr.
Performance comparison of the active suspension and passive suspension with
30% uncertainty due to irregular track at LRVs speed of 50 km/hr.
Case 1: Irregular track at LRVs speed of
70 km/hr
To verify robustness of controllers in terms of uncertainty of LRVs carbody mass because of passengers load, the simulation is considered. The time responses of the vertical acceleration for each carbody in passive suspension systems, active suspension systems with the possible percentage change of passengers as the uncertainty, such as
10% and
30%,
, are compared in Figs 3 and 3.
Obviously, it is seen that when the suspension systems is controlled by the proposed control approach under two types of uncertainty conditions, the vertical acceleration of all three carbodies is the smallest. The result means that the proposed active control law design can be applied to effectively suppress vibrations from irregular track and to supply the better ride comfort. In addition, the simulation results of the root mean square (RMS) values of suspension accelerations for Case 1 are summarized in Table 2.
Ride quality for Case 1 (
)
Acceleration
Case 1
parameter
Active
Active
Passive
Passive
10%
30%
10%
30%
Car 1
0.2492
0.2067
0.3034
0.2901
0.0870
0.0732
0.1200
0.1120
0.3115
0.2465
0.4314
0.4223
Car 2
0.3029
0.2062
0.5545
0.5397
0.0947
0.1275
0.3211
0.3021
0.2906
0.2029
0.3924
0.4051
Car 3
0.2741
0.2346
0.3162
0.3275
0.0850
0.0739
0.1688
0.1531
0.1639
0.1263
0.1880
0.1959
Overall average
0.2065
0.1664
0.3106
0.3053
Ride quality for Case 2 (
)
Acceleration
Case 2
parameter
Active
Active
Passive
Passive
10%
30%
10%
30%
Car 1
0.1726
0.1519
0.2164
0.2091
0.0604
0.0534
0.0835
0.0788
0.2215
0.1845
0.3146
0.3082
Car 2
0.2255
0.1587
0.4051
0.3941
0.0660
0.0879
0.2141
0.2034
0.2191
0.1602
0.3098
0.3170
Car 3
0.1929
0.1730
0.2297
0.2369
0.0586
0.0526
0.1271
0.1163
0.1137
0.0968
0.1392
0.1452
Overall average
0.1478
0.1243
0.2266
0.2232
The RMS values of the overall acceleration oscillation amplitudes of the proposed active suspension systems with respect to the
10% and
30% mass uncertainties are, respectively, 0.2065 and 0.1664 m/s
; therefore, it is found that ride quality can be improved by 33.5% and 45.5%, compared with the passive systems, respectively. Consequently, the results are able to validate the performance and robustness of the proposed control method for LRVs active suspension systems.
Case 2: Irregular track at LRVs speed of
50 km/hr
In this case, we set LRVs speed at 50 km/hr on the irregular track. The various mass uncertainties and actuator delays in Case 2 are considered in the simulation. As shown in Figs 5 and 5, the active suspension controlled by the proposed control approach yields smaller accelerations than the passive one, even if the actuator delays and mass uncertainties were added in LRVs suspension model.
Table 3 represents the RMS values of the overall acceleration oscillation amplitudes in Case 2 for active and passive suspension systems. It can be observed again that the proposed control approach yields much better performance in terms of LRVs ride comfort. Table 3 shows that the overall acceleration of LRVs with
10% and
30% mass uncertainties has been reduced to 0.1478 and 0.1243 m/s
. Correspondingly, ride quality is improved by 34.8% and 44.3%, respectively.
We can easily confirm that the proposed control approach not only achieves a good rejection capability for external disturbance from random track irregularities, but also offers satisfactory ride quality for passengers.
Conclusion
In this paper, we develop a robust optimal control strategy for the design of robust active suspension systems for light rail vehicles (LRVs) with the consideration of actuator delays, matched uncertainties from changes in passenger number as well as external disturbances from track irregularities. This work aims to bridge this gap by applying Bellman’s optimality principle and Razumikhin theorem to solve the robust control problem; moreover, derives sufficient conditions based on Lyapunov stability theory for the existence of such a feedback controller. Thus, the resulting feedback control law with linear state feedback can not only ensure system stability, but also achieve robust performance when there are bounded uncertainties and actuator delays. Numerical simulation results indicate that the proposed robust optimal control strategy achieves satisfactory performance and robustness of vibration suppression, even for large model parameter perturbations or delay times. The proposed control strategy is further extended to a general nonlinear uncertain system with other hard nonlinearities. We believe that our approach holds great promise for solving a variety of practical problems and challenges.
In this paper we have addressed the problem of robust control by using optimal control approach for solving the linear systems with control-input delays and uncertainties. Here we briefly describes some interesting research topics for further investigation.
The extending of the nonlinear systems to include the unbounded uncertainties can be taken into account.
In this paper, the proposed theorem for several cases supposes that the delay time is fixed and known. We will take into account the linear time-varying system with multiple delays, incommensurate delays or time varying delays.
Footnotes
Acknowledgments
This research was sponsored by the Taiwan Ministry of Science and Technology Research Grant (Project no. MOST 105-2221-E-035-071).
References
1.
ShiehNCLinCLLinYCLiangKZ. Optimal design for passive suspension of a light rail vehicle. Journal of Sound and Vibration2005; 285(1-2): 407-424.
2.
LiaoWHWangDH. Semiactive vibration control of train suspension systems via magnetorheological dampers. Journal of Intelligent Material Systems and Structures2003; 14(3): 161-172.
3.
HongKSSohnHCHedrickJK. Modified skyhook control of semi-active suspension: A new model, gain scheduling, and hardware-in-the-loop-tuning. ASME Journal of Dynamic Systems, Measurement, and Control2002; 124(1): 158-167.
4.
KochGKloiberT. Driving state adaptive control of an active vehicle suspension system. IEEE Transactions on Control Systems Technology2014; 22(1): 44-57.
5.
DuHLiWZongN. Integrated seat and suspension control for a quarter car with driver model. IEEE Transactions on Vehicular Technology2012; 61(9): 3893-3908.
6.
LiH et al., Fuzzy sampled-date control for uncertain vehicle suspension systems. IEEE Transactions on Cybernetics2014; 44(7): 1111-1126.
7.
SunWPanHGaoH. Filter-based adaptive vibration control for active vehicle suspensions with electrohydraulic actuators. IEEE Transactions on Vehicular Technology2016; 65(6): 4619-4626.
8.
ChenHLiuZYSunPY. Application of constrained H∞ control to active suspension systems on half-car models. AMSE Journal of Dynamic Systems, Measurement, and Control2004; 127(3): 345-354.
9.
WuH. Robust stabilization of uncertain time-delay dynamical systems with unknown bounds of uncertainties: A non-linear control method. IET Control Theory and Applications2015; 9(13): 2039-2046.
10.
FridmanE. Stability of systems with uncertain delays: A new complete lyapunov krasovskii functional. IEEE Transactions on Automatic Control2006; 51(5): 885-590.
11.
HuLS et al., A linear matrix inequality (LMI) approach to robust H2 sampled-data control for linear uncertain systems. IEEE Transactions on Systems, Man, and Cybernetics2003; 33(1): 149-155.
12.
GuKKharitonovVLChenJ. Stability of time-delay systems. Birkhauser Boston, 2003. ISBN 978-1-4612-6584-9.
13.
HeiseDHolzapfelF. Time-delay margin computation of model reference adaptive control using the razumikhin theorem. 53rd IEEE Conference on Decision and Control, Los Angeles, USA, 2014; 529-535.
14.
LinYCLinCLShiehNC. A hybrid evolutionary approach for robust active suspension design of light rail vehicles. IEEE Transaction on Control Systems Technology2006; 14(4): 695-706.
15.
GargVKDukkipatiRV. Dynamics of railway vehicle systems. Academic Press Canada, 1984. ISBN 978-0-12-275950-5.
16.
CaiGPHuangJZYangX. An optimal control method for linear systems with time delay. Computers and Structures2003; 81(15): 1539-1546.
17.
LewisFLVrabieDLSyrmosVL. Optimal control 3rd edition, John Wiley and Sons, Inc., 2012. ISBN: 978-0-470-63349-6.
18.
SeuretAGouaisbautF. Wirtinger-based integral inequality: Application to time-delay systems. Automatica2013; 49(9): 2860-2866.
19.
HeXXChenSBWuL. Design of performance robustness for uncertain linear systems with state and control delays-LMI approach. in Proc 3rd World Congress on Intelligent Control and Automation, Hefei, China, 2000; 3359-3362.
20.
JoeZM. Light rail vehicle compression requirements. Transportation Research Board – National Academy Press, Washington, D. C., 1997. ISBN 0-309-06019-2.
21.
ZhaoYSunWGaoH. Robust control synthesis for seat suspension systems with actuator saturation and time-varying input delay. Journal of Sound and Vibration2010; 329(21): 4335-4353.