Nowadays, the cellular manufacturing system is thriving into the industrial field due to the higher provided profits and quality of products. Moreover, the manufacturing cell formation problem is considered as the most studied implementation of the cellular manufacturing system. Therefore, a novel gravitational Search Algorithm was introduced and applied to the cell formation problem in this paper. According to the obtained results, the novel gravitational Search Algorithm provides good quality solutions with a reasonable computational time. In the original discrete Gravitational Search Algorithm the exploration strategy was performed by means of a mutation operator applied several times to a solution. To decrease the complexity of the algorithm and the computational time a crossover operator; equivalent to the application of the mutation operator for a number of times; is presented. A modified Local Search algorithm is performed to seek more extensively the solution space. The performance of the novel Gravitational Search Algorithm adaptation was evaluated on a set of 35 benchmarks from the literature. According to the obtained results and to the comparative study, the novel Gravitational Search Algorithm is considered as one of the best algorithms.
Group technology GT is a concept which had emerged in the late 1950s; it had been first introduced by Mitrofanov and adopted for the first time by the ford Motor Company in the 1970s. Since then GT has been widely applied in the industrial field due to its greater impact on increasing the productivity, quality and also due to its capabilities to improve the manufacturing costs and to decrease the lead time [1].
Application of the GT concept which is known as cellular manufacturing is based on the principle that similar things should be manufactured similarly. One of the most used ways to bring the cellular manufacturing philosophy to bear is called the cell formation problem CFP. The CFP takes its origins from the works performed by the pioneers of the GT such as Flanders (1924), Mitrofanov (1959), Burbidge (1963), Petrov (1966), Ivanov (1968), Durie (1970), Edwards (1971), Grayson (1971), and Gallagher and Knight (1973) and others according to the reference [2].
Given a system within a company, constituted by a set of machines and a set of parts. The CFP consists of dividing the system into subsystems, named cells, in such a manner that the inter-cell movements are decreased and the intra-cell movements are increased. This can be done by grouping parts into families and assign them to groups of machines.
To the best of our knowledge [1, 3, 4, 5], the methods used to solve the cell formation problem can be divided into the following five categories:
Cluster analysis.
Graph partitioning approaches.
Mathematical programming methods.
Heuristic and Metaheuristic algorithms.
Artificial intelligence methodologies.
Despite the fact that a great number of exact methods have been applied to motivated sizes of the CFP [6, 7, 8], the CFP is an NP-complete (hard) problem according to Ballakur and steudel [9]. And for this particular reason, a large number of heuristics have been employed to solve the CFP with good solutions in a reasonable computational time.
The purpose of this paper is to introduce a novel extended version of discrete gravitational search algorithm applied to the cell formation problem. The manufacturing system we have employed is represented by a binary product-machine matrix named the incidence matrix. The discrete gravitational search algorithm has a well-balanced mechanism for enhancing exploration and exploitation abilities. Furthermore, its capability to find the good search space regions in the early iterations [10].
The reminder of this paper is organized as follows. In Section 2, the CFP and the mathematical model are introduced. In Section 3, The Gravitational Search Algorithm (GSA) is presented. Further, the main components of our algorithm are detailed and the performance of our approach is shown by means of the 35 well-known benchmarks. The obtained results show that the proposed DGSA reaches the best-known solutions of 31 benchmarks. Our DGSA also outperform the best-known solution of the 33rd benchmark. Finally, both contributions and concluding remarks are presented in Section 6.
The mathematical formulation of the Cell Formation Problem
The Cell Formation Problem
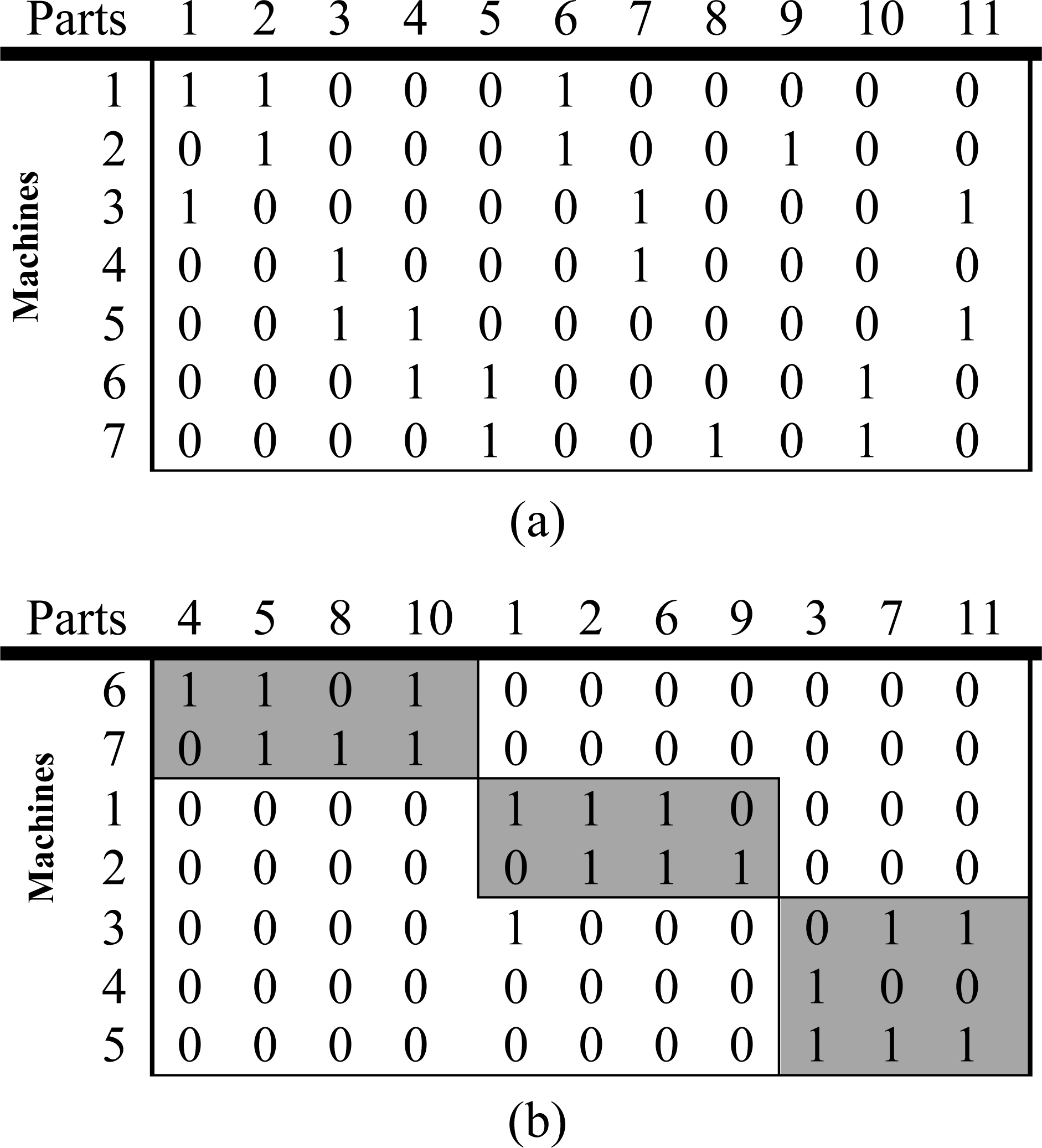
Given a 0-1 machine-part incidence matrix, the main aim of the CFP is to obtain a diagonal block matrix by rearranging the rows and the columns, in such a manner as to construct machine cells and part families. The part families are dispatched to machine cells in the main purpose to optimize the performance measure. In this paper, the Grouping Efficacy was adopted due to its several advantages such as:
The ability to incorporate both the with-in cell machine use and the inter-cell movement,
The ability to differentiate between well-struc- tured (with a high with-in cell machine and low inter-cell movement) and ill-structured (with a low with-in cell machine and high inter-cell movement) incidence matrices,
The ability to generate interesting block diagonal matrices,
The simplicity of implementation,
Not requiring a weight factor (weight factor is a measure required in the Grouping Efficiency performance measure).
An incidence matrix example.
Many performance measures had been cited in literature. A great overview of performance measures can be found in [28, 29]. The Grouping Efficacy is defined as follows:
where is the total number of 1 in the incidence matrix, is the number of voids (the number of zeros within a cell), is the number of exceptional elements (the number of out of all cells), and is the number of within a given cell. An example of a solution of the CFP is shown on Fig. 1, where machines and parts were respectively grouped into cells and families such as each part family were assigned to a cell containing the machines required for the operations.
In this subsection a mathematical model similar to the one presented in [30], is introduced. The mathematical programming model is formulated as bellow:
Subject to
where and are two binary variables defined as below:
For each
For each
And where
denotes the element in the row and the column of the incidence matrix. The Eqs (3) and (4) ensure that each part and each machine must be assigned to only one cell. The Eqs (5) and (6) guarantee that each cell contains at least one part and one machine. The Eqs (7) and (8) denote that decision variables are binary. In the computational experiments, the number of cells, denoted , was fixed for each problem to its value in the best-known solution reported in the literature.
The gravitational search algorithm
The Gravitational Search Algorithm (GSA) is a population based procedure first proposed in [31] that mimics the Newton’s Law of Gravity and the Law of Motion to solve optimization problem of the form . The value measures the fitness of a solution . In the GSA, each solution corresponds to an agent having four specifications: position , inertia mass, active gravitational mass, and passive gravitational mass.
Now assume that solutions (agents) are available:
In the context of gravitational motion, good solutions (with higher fitness ) move more slowly than ones having smaller fitness . Hence, agents with smaller fitness navigate around agents with higher fitness. Through the iterations, the gravitational and inertia masse of each agent is regulated. After a while, the solutions will be attracted by the one having the best fit that represents the optimum solution in the search space.
Now at each iteration, all solutions (agents) are modified to mimic the Newton Law of Gravity. At iteration , we denote the position of solution by:
It is modified according to a velocity vector involving an acceleration vector . To determine these vectors, consider the acting force on solution by another solution specified as follows:
where represents the active gravitational mass related to agent represents the passive gravitational mass related to agent represents the gravitational constant at time represents a small constant, and represents the Euclidian distance between the two agents and :
To include a stochastic characteristic to the GSA, the total force acting on solution (agent) in a dimension is determined by a randomly weighted sum of components of the forces exerted from other agents:
where denotes a random number in the interval
Thus, by the Law of Motion, the acceleration of the agent at a specific time and at the dimension , is specified as follows:
where denotes the agent inertia mass.
Moreover, the next velocity of the solution (agent) at the next iteration is specified by a fraction of its current velocity to which its current acceleration is added. Therefore, its position and velocity could be defined as follows:
where denotes a uniform random variable in the interval This random number is used to give a randomized characteristic to the GSA.
The gravitational constant is initialized at the beginning of the algorithm, and its value is reduced during the search process to control the search accuracy. In other words, is a function of the initial value and time
The fitness of the updated solution are used to simulate the fact that the best solutions are more attractive and that they induce a larger input on modifying the gravitational and the inertia masses. In implementing the GSA, the three different masses are specified as identical:
Moreover, they are specified as follows:
where and are defined as follows:
During the early iterations of the procedure, the acting forces on an agent are specified as in relation Eq. (14) to induce an exploration phase of the process to search more extensively the feasible domain. Later during the resolution, the process should move to an exploitation phase as proposed in [31]. Thus in Eq. (14), instead of using all the other solutions to specify the acting force, we use only a set Kbest of the best solution available. Hence in the early stage Kbest includes all the solutions, but its size is reduced during the process to include only the best solutions. Consequently, the Eq. (14) is modified as follows:
According to [32] the GSA is one of the swarm intelligence algorithms. The swarm intelligence algorithms, such as particle swarm algorithm, are usually described as a swarm based system leading to emergent behavior specified through interactions between components of the system. Even though, every swarm intelligence algorithms set has its own way to explore and exploit the search space, they all share common principles. Thus, the GSA could be easier to understand for someone used to the particle swarm algorithm.
The discrete gravitational search algorithm
In this paper, an approach quite similar to the DGSA proposed in [33] is used to solve the CFP. The chromosomal representation, the initialization of the initial population, the components of the proposed DGSA, and the replacement strategy will be described in detail thereafter.
The Chromosomal representation
A chromosome made of genes, is used to represent a solution to the problem. The chromosome is encoded as a vector of integers. Each integer of the chromosome takes its value within the interval. The chromosome consists of two parts: the parts part, the machines part. Above, Fig. 2 illustrates an example of a chromosome where denotes the cell to which the part is assigned and where denotes the cell to which the machine is assigned.
The chromosomal representation.
The chromosomal representation of the solution matrix in Fig. 1. above is as follows:
The generation of the initial population
The initial population contains individuals ordered incrementally. dissimilar individuals are randomly generated. A solution constructed by combining the-group-and-assign method introduced in [34] and the approach presented in [35], is injected into the population. The set of individuals constituting the current population is denoted Population.
Generation of the initial population
whiledo
(Generation of an individual )
for to do
Generated randomly an integer
Assign the part or machine to the cell
end for
Apply the correction process to
ifthen
is injected into Population
end if
end while
Construction of the injected solution
Apply the correction process to
Inject into Population
Order the individuals of Population incrementally
The Construction of the injected solution
Group-and-Assign method: Forming the machine groups
(stage1)
generate randomly an integer
assign the machine to the cell
for to do
for to do
ifthen
assign the machine to the cell
end if
end for
end for
(stage2)
for to do
ifthen
for to do
for to do
ifthen
end if
end for
ifthen
end if
end for
assign the machine to the cell
update the set
end if
end for
The Rojas Approach: Forming the part families
for to do
for to do
define
ifthen
end if
end for
assign the part to the cell
end for
apply the correction process
The group-and-assign method is employed to form the machine groups in two stages. The first stage consists of assigning one machine to each cell. The second stage consists of assigning the remaining machines to cells with the aim of maximizing the total part flow within cells.
is a matrix. The matrix indicates the parts proceeded by machines within a given cell. denotes the element in the row and the column of the matrix.
For each
The set of assigned machines is denoted .
The approach introduced in [35] is used to assign parts to groups of machines. It mainly consists in assigning each part to the cell that maximized the quotient where the variable denotes the number of machines in the cell that process the part , the variable denotes the number of machines within the cell that doesn’t process the part and denotes the number of machines processing the part .
The correction process proceeds by assigning at least and at most one part and one machine to empty cells. To accomplish the correction process, empty cells and cells containing more than one machine or one part have to be defined. In our case, an empty cell is a cell that does not contains at least one part or at least one machine. Two matrices serve to identify empty cells and cells containing more than one machine or one part. Those matrices are denoted and . is a matrix. The matrix indicates the machines assigned to each cell. denotes the element in the row and the column of the matrix.
For each
is a matrix. The matrix indicates the parts assigned to each cell. denotes the element in the row and the column of the matrix.
The proposed DGSA flowchart.
For each
The set of cells with no part is denoted . The set of the parts of the cells containing more than one part is denoted . denotes the first element of . denotes the first element of . Analogically, the set of cells with no machine is denoted . The set of the machines of the cells containing more than one machine is denoted . denotes the first element of . denotes the first element of .
The correction process
construct and sets based on
whiledo
assign the part to the cell
end while
construct and sets based on
whiledo
assign the part to the cell
end while
The components of the proposed gravitational search algorithm
The Discrete Gravitational Search algorithm has two main phases: the Dependent Movement Search Operator Phase (DMSOP) and the Independent Movement Operator Phase (IMSOP). The DMSOP is based on a movement operator. The movement operator gets the current position of an agent and its Dependent Movement Length (DML) as input parameters. The movement operator returns a new position in the solution space as output. The DML is the acceleration vector calculated by the Eq. (16). The IMSOP is a modified version of a local search algorithm. Indeed, the independent movement length (IML) calculated by means of the Eq. (17) is added as a stopping criterion. The Fig. 3 shows the DGSA flowchart.
The dependent movement search operator phase for the cell formation problem
The DMSOP consists of iteratively applying a cross- over operator to a solution denoted and a solutions within the Kbest set denoted . The variable denotes the size of the Kbest set.
The Dependent Movement Search Operator Phase (DMSOP)
generate randomly an integer
for to do
( denotes the crossover operator )
end for
assign to the position
Let assume that and are represented as follows:
The crossover consists of mixing up the elements of and by using the acceleration vector of . The acceleration vector of is denoted . The is a vector calculated by means of the Eq. (16). For each element of we calculate where and . If otherwise . denotes the output solution of the crossover operator.
The output vector of the crossover operator
The crossover operator
generate an integer
for to do
calculateDiff
ifthen
else
end if
end for
Generate a reel number
ifthen
apply the improvement process
end if
The improvement process enhances the part of machines based on the part of parts and vice versa. The improvement process used in this paper is detailed below.
The improvement process
for to do
for to do
for to then
ifandthen
end if
ifandthen
end if
end for
ifthen
end if
end for
end for
for to do
for to do
for to do
ifandthen
end if
ifandthen
end if
end for
ifthen
end if
end for
end for
update
for to do
for to do
for to then
ifandthen
end if
ifandthen
end if
end for
ifthen
end if
end for
end for
The independent movement search operator phase for the cell formation problem
The Independent Movement Search Operator Phase is a modified local search algorithm. In this paper a Tabu search algorithm with short memory, is used as an IMSOP. The Tabu search algorithm was first introduced by [36] and then extended in [37]. The main purpose of the Tabu search algorithm is to overcome the local optima. The IMSOP starts with a given solution and iteratively seeks for better solutions by applying either the add/drop operator or the swap operator with the probability in such a way that the moves within the Tabu list are forbidden unless the aspiration criteria are met. This process is continued until the stopping criteria are met. The correction process introduced above had been embedded in the Tabu search algorithm. To use the Tabu search five concepts have to be defined. Those five concepts are: the neighborhood structure, the movement operators, the Tabu list, the aspiration criteria and the stopping criteria.
The Independent Movement Search Operator Phase
choose randomly a solution
Generate randomly an integer
while or do
whiledo
ifthen
generate randomly a reel number
ifthen
(add/dropoperator)
generate randomly an integer
generate randomly an integer
apply the improvement process
apply the correction process
ifthen
end if
end if
ifthen
(swapoperator)
generate randomly an integer
generate randomly an integer
apply the improvement process
apply the correction process
ifthen
end if
end if
else
generate randomly a reel number
ifthen
(add/dropoperator)
choose randomly
apply the improvement process
apply the correction process
ifthen
end if
update
update
end if
ifthen
(swapoperator)
choose randomly
generate randomly an integer
apply the improvement process
apply the correction process
ifthen
end if
update
update
end if
end if
end while
end while
A solution is a neighbor of , if except for at least one dimension and at most for two dimensions. The neighborhood size is denoted . In our paper, is fixed at . The operators used to move toward the search space are the add/drop operator and swap operator. The add/drop operator randomly takes an element and modifies it. The swap operator exchanges two elements of a given solution. The Tabu list stores the tabu movements. In our case we used a matrix denoted as a tabu list. denotes the row and the column of the matrix . If a machine or a part is assigned to the cell increases. In our case, we consider a short-term memory tabu search thereby the value 10 is added to . Consequently, movements are made tabu for 10 iterations if aspiration criteria are not met. The aspiration criteria are the circumstances in which the tabu list is ignored. The tabu list is ignored if the number of none tabu movements is lower than 2. the number of none tabu movements is denoted . is the set of none tabu positions. A none tabu position is couple with and . The Tabu search stops when it reaches IML or maxit. maxit denotes the number of maximum iterations and IML denotes the independent movement search of a starting solution denoted .
The replacement strategy for the Cell Formation Problem
In this paper, we used an uncommon replacement strategy. The resulting solution of DMSOP replaces a randomly chosen individual in the population. Moreover, the resulting solution of DMSOP is whether a black box or not. A black box solution is a solution which takes the fitness of the individual it replaces. The resulting solution of IMSOP is injected into the population according a replacement quite similar the elitist replacement. The replacement strategy is detailed below.
The replacement strategy
Generate randomly an integer
Generate randomly a reel number
ifthen
is a black box
end if
for to do
ifthen
break
end if
ifandthen
break
end if
end for
ifthen
end if
The relevant parameters of DGSA
Parameter
Value
The size of the population
3
The number of iterations
500
The size of the set
The value of the initial G
100
Computational results
DGSA
Problem
M
P
C
Worst Eff
Best Eff
Average Eff
Time (second)
Best known Eff
Gap (%)
P1
5
7
2
82.35
82.35
82.35
0.0219
82.35
0
P2
5
7
2
69.57
69.57
69.57
0.0156
69.57
0
P3
5
18
2
79.59
79.59
79.59
0.0124
79.59
0
P4
6
8
2
76.92
76.92
76.92
0.0141
76.92
0
P5
7
11
5
60.87
60.87
60.87
0.0937
60.87
0
P6
7
11
4
70.83
70.83
70.83
0.0234
70.83
0
P7
8
12
4
69.44
69.44
69.44
0.0266
69.44
0
P8
8
20
3
85.25
85.25
85.25
0.0188
85.25
0
P9
8
20
2
58.72
58.72
58.72
0.039
58.72
0
P10
10
10
5
75
75
75
0.0577
75
0
P11
10
15
3
92
92
92
0.0236
92
0
P12
14
24
7
72.06
72.06
72.06
0.3263
72.06
0
P13
14
24
7
71.83
71.83
71.83
0.3766
71.83
0
P14
16
24
8
53.26
53.26
53.26
4.1425
53.26
0
P15
16
30
6
69.53
69.53
69.53
0.915
69.53
0
P16
16
43
8
57.53
57.53
57.53
10.6387
57.53
0
P17
18
24
9
57.73
57.73
57.73
3.6019
57.73
0
P18
20
20
5
43.06
43.17
43.109
164.3702
43.45
0.64
P19
20
23
7
50.81
50.81
50.81
4.3093
50.81
0
P20
20
35
5
77.91
77.91
77.91
1.6562
77.91
0
P21
20
35
5
57.14
57.14
57.14
280.6444
57.98
1.45
P22
24
40
7
100
100
100
1.1683
100
0
P23
24
40
7
85.11
85.11
85.11
1.3688
85.11
0
P24
24
40
7
73.51
73.51
73.51
1.3756
73.51
0
P25
24
40
11
53.29
53.29
53.29
53.4848
53.29
0
P26
24
40
12
48.95
48.95
48.95
393.5611
48.95
0
P27
24
40
12
46.58
46.58
46.58
957.4588
47.26
1.44
P28
27
27
5
54.82
54.82
54.82
11.047
54.82
0
P29
28
46
10
47.08
47.08
47.08
584.1145
47.08
0
P30
30
41
14
63.31
63.31
63.31
790.244
63.31
0
P31
30
50
13
59.77
59.77
59.77
2033.4975
60.12
0.58
P32
30
50
14
50.83
50.83
50.83
792.9925
50.83
0
P33
36
90
17
47.9
48.01
47.97
1128.0133
47.75
0.5
P34
37
53
3
60.64
60.64
60.64
399.5972
60.64
0
P35
40
100
10
84.03
84.03
84.03
42.2884
84.03
0
The computational results
In this section, a statistical study is performed to define the parameter values of the DGSA. Based on these parameter values, a comparative study is accomplished to evaluate the performance of the proposed algorithm.
The Population size and the gap variation graph.
The probability of improving process and the gap variation graph.
The number of required iterations and the gap variation graph.
The measure used to evaluate the algorithm performance is called gap. The gap is a measure which represents the difference between the obtained results average denoted A and the best known solution denoted B for a given instance. The gap is calculated as follows:
In the DGSA introduced by [33] the Kbest set size and the gravitational constant parameters were defined as relevant parameters so we kept the same strategies to determine their values. To define the other relevant parameters of the proposed DGSA, a statistical study was performed. Based on experiments, we noticed that the value of the gap variable depends on the values of , and (the number of required iterations) variables. To verify the relevance of mentioned parameters, we used the multiple regression method. The multiple regression is a statistical process that defines the relationships among variables by means of the regression model. In our model the dependent variable is the gap variable. The independent variables in the model are , and .
Ten different executions of the DGSA with different values of the independent variables were performed. We randomly picked up the , and values for the 35 problems. The statistical study shows that the relation between the dependent variable and independent variables is statically significant. The Fig. 4 shows that the gap variable value is almost constant even if varies. Therefore is not considered as a regression model variable. Unlike the Fig. 4, the Figs 5 and 6 confirm that the variations of and influence the gap value. Furthermore, the statistical study demonstrates that only 74.49% of the gap variation is explained by the variations of and .
The regression model is defined as bellow:
The Multiple Regression process uses two statistical tests to demonstrate the significance of variables. The statistical tests are named Fisher and Student tests.
The fisher and student tests shows that and are significance variables. Therefore, inasmuch as the value of the is known, we can use the Eq. (26) to predict the value of and inversely. The parameters which play a major role in the performance of the method, are provided in Table 1.
After adjusting the parameters, the proposed DGSA was tested on a set of 35 benchmarks from literature. Those 35 benchmarks are used in a great number of works. The size of benchmarks and the best cell size were reported in Table 2. The proposed heuristic was coded in JAVA language, and was run on a personal computer with an intel Core i5-2540M 2.60 GHz processor. For each instance, the algorithm was run 10 times.
Moreover, the gap, the average CPU time, the best, the worst and the average efficacy were also reported in Table 2. The references of the benchmark instances and the best-known solutions could be found in [55] and [56]. The best obtained results were compared to the best known solutions. The comparison in Table 2 shows that our DGSA outperforms the best known solution for the 33th problem and didn’t reach the best known solution for four problems (P18, P21, P27 and P31). The appendix gives the block diagonal matrices for the best solutions found by the DGSA for all 35 problems.
The obtained results by the DGSA were also compared to the results reported for the cell formation problem using the following methods:
simulated annealing with variable neighborhood proposed in [54].
The first five approaches above do not allow singletons. Therefore, the quality of solutions obtained by these five algorithms is lower than the quality of solutions obtained by the approaches that allow singletons.
The comparative study in Table 3 shows that the proposed algorithm provides the best solution for 30 test problems and that it outperform sixteen previous proposed methods.
Conclusion
Throughout this paper the NP-complete cell formation problem is introduced and solved by the gravitational search algorithm. The DGSA has never been applied to the cell formation problem before. Therefore, a great number of modifications were necessary for the heuristic adaptation. Furthermore, the exploration and exploitation strategies were highlighted. Hence, as an exploration strategy a modified Tabu search algorithm was used. An improving process was embedded to the original Tabu with the main goal to improve the computational time. We also hybridized two existing approaches to construct the initial solution. The accomplished statistical study defined the relevance of a number of parameters. The obtained results with the most used 35 benchmarks show that the algorithm was successfully adapted to the Cell Formation Problem.
SureshNCKayJM. Group technology and cellular manufacturing: Updated perspectives. in: Group Technology and Cellular ManufacturingSureshNCKayJM, eds, Springer US, 1998; 1-14.
3.
PapaioannouGWilsonJM. The evolution of cell formation problem methodologies based on recent studies (1997-2008): Review and directions for future research. Eur. J. Oper. Res. 2010; 206(3): 509-521.
4.
SinghN. Design of cellular manufacturing systems: An invited review. Eur. J. Oper. Res. Sep 1993; 69(3): 284-291.
5.
GhoshTSenguptaSChattopadhyayMDanPK. Meta-heuristics in cellular manufacturing: A state-of-the-art review. Int. J. Ind. Eng. Comput. Jan 2011; 2(1): 87-122.
6.
KrushinskyDGoldengorinB. An exact model for cell formation in group technology. Comput. Manag. Sci. Aug 2012; 9(3): 323-338.
7.
GoldengorinBKrushinskyDSlompJ. Flexible PMP approach for large-size cell formation. Oper. Res. Oct 2012; 60(5): 1157-1166.
8.
ElbenaniBFerlandJA. Centre interuniversitaire de recherche sur les réseaux d’entreprise, la logistique et le transport. Cell formation problem solved exactly with the Dinkelbach algorithm. Montréal: CIRRELT, 2012.
9.
BallakurASteudelHJ. A within-cell utilization based heuristic for designing cellular manufacturing systems. Int. J. Prod. Res. 1987; 25(5): 639-665.
10.
DowlatshahiMBNezamabadi-pourHMashinchiM. A discrete gravitational search algorithm for solving combinatorial optimization problems. Inf. Sci. Feb 2014; 258: 94-107.
11.
ChandrasekharanMPRajagopalanR. Zodiac – An algorithm for concurrent formation of part-families and machine-cells. Int. J. Prod. Res. 1987; 25(6): 835-850.
12.
SrinivasanGNarendranTT. Grafics – A nonhierarchical clustering algorithm for group technology. Int. J. Prod. Res. 1991; 29(3): 463-478.
13.
WuTHChungSHChangCC. A water flow-like algorithm for manufacturing cell formation problems. Eur. J. Oper. Res. Sep 2010; 205(2): 346-360.
14.
GonçalvesJFResendeMGC. An evolutionary algorithm for manufacturing cell formation. Comput Ind Eng. 2004; 47(2-3): 247-273.
15.
DíazJALunaDLunaR. A GRASP heuristic for the manufacturing cell formation problem. TOP. Oct 2012; 20(3): 679-706.
16.
ChengCHGuptaYPLeeWHWongKF. A TSP-based heuristic for forming machine groups and part families. Int. J. Prod. Res. 1998; 36(5): 1325-1337.
17.
TariqAHussainIGhafoorA. A hybrid genetic algorithm for machine-part grouping. Comput. Ind. Eng. Feb 2009; 56(1): 347-356.
18.
OnwuboluGCMutingiM. A genetic algorithm approach to cellular manufacturing systems. Comput. Ind. Eng. Feb 2001; 39(1-2): 125-144.
19.
NoktehdanAKarimiBKashanAH. A differential evolution algorithm for the manufacturing cell formation problem using group based operators. Expert Syst. Appl. Jul 2010; 37(7): 4822-4829.
20.
LiXBakiMFAnejaYP. An ant colony optimization metaheuristic for machine – part cell formation problems. Comput. Oper. Res. Dec 2010; 37(12): 2071-2081.
21.
JamesTLBrownECKeelingKB. A hybrid grouping genetic algorithm for the cell formation problem. Comput. Oper. Res. Jul 2007; 34(7): 2059-2079.
22.
WuTHChangCCChungSH. A simulated annealing algorithm for manufacturing cell formation problems. Expert Syst. Appl. Apr 2008; 34(3): 1609-1617.
23.
MahdaviIPaydarMMSolimanpurMHeidarzadeA. Genetic algorithm approach for solving a cell formation problem in cellular manufacturing. Expert Syst. Appl. Apr 2009; 36(3): Part 2, 6598-6604.
24.
WuTHChangCCYehJY. A hybrid heuristic algorithm adopting both Boltzmann function and mutation operator for manufacturing cell formation problems. Int. J. Prod. Econ. Aug 2009; 120(2): 669-688.
25.
TunnukijCHT. An enhanced grouping genetic algorithm for solving the cell formation problem. Int. J. Prod. Res. 2009; 47: 1989-2007.
26.
PaillaATrindadeARParadaVOchiLS. A numerical comparison between simulated annealing and evolutionary approaches to the cell formation problem. Expert Syst. Appl. Jul 2010; 37(7): 5476-5483.
27.
YingKCLinSWLuCC. Cell formation using a simulated annealing algorithm with variable neighbourhood. Eur. J. Ind. Eng. Jan 2011; 5(1): 22-42.
28.
KeelingKBBrownECJamesTL. Grouping efficiency measures and their impact on factory measures for the machine-part cell formation problem: A simulation study. Engineering Applications of Artificial Intelligence. 2007; 20(1): 63-78.
29.
SarkerBR. Measures of grouping efficiency in cellular manufacturing systems. European Journal of Operational Research. 2001; 130(3): 588-611.
30.
ElbenaniBFerlandJABellemareJ. Genetic algorithm and large neighbourhood search to solve the cell formation problem. Expert Systems with Applications. 2012; 39(3): 2408-2414.
31.
RashediENezamabadi-PourHSaryazdiS. GSA: A gravitational search algorithm. Information Sciences. 2009; 179(13): 2232-2248.
32.
KrauseJCordeiroJParpinelliRSLopesHS. A survey of swarm algorithms applied to discrete optimization problems. Swarm Intelligence and Bio-inspired Computation: Theory and Applications. Elsevier Science and Technology Books. 2013; 169-191.
33.
DowlatshahiMBNezamabadi-PourHMashinchiM. A discrete gravitational search algorithm for solving combinatorial optimization problems. Information Sciences. 2014; 258: 94-107.
34.
WuTHLowCWuWT. A tabu search approach to the cell formation problem. The International Journal of Advanced Manufacturing Technology. 2004; 23(11-12): 916-924.
35.
RojasWSolarMChaconMFerlandJ. An efficient genetic algorithm to solve the manufacturing cell formation problem. in: Adaptive Computing in Design and Manufacture VI. Springer, London. 2004; 173-183.
36.
GloverF. Tabu search – part I. ORSA Journal on Computing. 1989; 1(3): 190-206.
37.
GloverF. Tabu search – part II. ORSA Journal on Computing. 1990; 2(1): 4-32.
38.
ChandrasekharanMPRajagopalanR. Zodiac – An algorithm for concurrent formation of part-families and machine-cells. Int. J. Prod. Res. 1987; 25(6): 835-850.
39.
SrinivasanGNarendranTT. Grafics – A nonhierarchical clustering algorithm for group technology. Int. J. Prod. Res. 1991; 29(3): 463-478.
40.
WuTHChungSHChangCC. A water flow-like algorithm for manufacturing cell formation problems. Eur. J. Oper. Res. Sep 2010; 205(2): 346-360.
41.
GonçalvesJFResendeMGC. An evolutionary algorithm for manufacturing cell formation. Comput Ind Eng. 2004; 47(2-3): 247-273.
42.
DíazJALunaDLunaR. A GRASP heuristic for the manufacturing cell formation problem. TOP. Oct2012; 20(3): 679-706.
43.
ChengCHGuptaYPLeeWHWongKF. A TSP-based heuristic for forming machine groups and part families. Int. J. Prod. Res. 1998; 36(5): 1325-1337.
44.
TariqAHussainIGhafoorA. A hybrid genetic algorithm for machine-part grouping. Comput. Ind. Eng. Feb 2009; 56(1): 347-356.
45.
OnwuboluGCMutingiM. A genetic algorithm approach to cellular manufacturing systems. Comput. Ind. Eng. Feb 2001; 39(1-2): 125-144.
46.
NoktehdanAKarimiBKashanAH. A differential evolution algorithm for the manufacturing cell formation problem using group based operators. Expert Syst. Appl. Jul 2010; 37(7): 4822-4829.
47.
LiXBakiMFAnejaYP. An ant colony optimization metaheuristic for machine-part cell formation problems. Comput. Oper. Res. Dec 2010; 37(12): 2071-2081.
48.
JamesTLBrownECKeelingKB. A hybrid grouping genetic algorithm for the cell formation problem. Comput. Oper. Res. Jul 2007; 34(7): 2059-2079.
49.
WuTHChangCCChungSH. A simulated annealing algorithm for manufacturing cell formation problems. Expert Syst. Appl. Apr 2008; 34(3): 1609-1617.
50.
MahdaviIPaydarMMSolimanpurMHeidarzadeA. Genetic algorithm approach for solving a cell formation problem in cellular manufacturing. Expert Syst. Appl. Apr 2009; 36(3): Part 2, 6598-6604.
51.
WuTHChangCCYehJY. A hybrid heuristic algorithm adopting both Boltzmann function and mutation operator for manufacturing cell formation problems. Int. J. Prod. Econ. Aug 2009; 120(2): 669-688.
52.
TunnukijCHT. An enhanced grouping genetic algorithm for solving the cell formation problem. Int. J. Prod. Res. 2009; 47: 1989-2007.
53.
PaillaATrindadeARParadaVOchiLS. A numerical comparison between simulated annealing and evolutionary approaches to the cell formation problem. Expert Syst. Appl. Jul 2010; 37(7): 5476-5483.
54.
YingKCLinSWLuCC. Cell formation using a simulated annealing algorithm with variable neighbourhood. Eur. J. Ind. Eng. Jan 2011; 5(1): 22-42.
55.
ZettamMElbenaniB. Gravitational search algorithm applied to the cell formation problem. in: Nature-Inspired Computation in Engineering. Springer International Publishing. 2016; 251-266.
56.
ZettamM. An hybrid gravitational method for solving the cell formation problem. Journal of Theoretical and Applied Information Technology. 2017; 95(20).