
Abstract
Unmanned Ariel Vehicles (UAVs) are interconnected to perform specific tasks through self-routing and air-borne communications. The problem of automated navigation and adaptive grouping of the vehicles results in improper task completion and backlogs. To address this issue, a Particle Swarm Optimization-dependent Multi-Task Assignment Model (PSO-MTAM) is introduced in this article. The swarms are initialized for the available linear groups towards the destination. This article addressed the subject of UAVs using a multi-task assignment paradigm to increase task completion rates and handling efficiency. The different swarm stages are verified for the task progression, resulting in completion at the final stage. In this completion process, the first local best solution is estimated using the completion and assignment rate of a single task. The second local best solution relies on reaching the final stage. The global solution is identified depending on the convergence of the above solutions in task progression and handling density. The swarm positions are immediately identified, and the synchronous best solutions generate the final global best. The backlog-generating solutions are revisited by reassigning or re-initializing the swarm objects. The proposed model’s performance is analyzed using task handling rate, completion ratio, processing time, and backlogs. Improving the handling rate is essential for this validation, necessitating solution and position updates from the intermediate UAVs. With varying task densities and varying degrees of convergence, the iterations continue until completion. There is an 11% increase in the task handling rate and a 12.02% increase in the completion ratio with the suggested model. It leads to a 10.84% decrease in processing time, a 9.91% decrease in backlogs, and a 12.7% decrease in convergence cost.
Keywords
Introduction
Unmanned aerial vehicles (UAVs) are drones driven via remote controllers. Unmanned aerial vehicles use ground-based controllers to control the vehicle. Task processing is a crucial task to perform in UAVs that perform tasks. Data are processed using digital photogrammetry in drones [1]. Task processing is a process where a series of actions are done for a particular purpose. Conceptual models are primarily used in UAVs for task processing. The conceptual model understands the exact reason that provides the necessary information for task processing [2]. The hierarchical structure of tasks is identified, and optimal data is produced to perform specific functions in UAVs. Conceptual models improve the reliability of UAVs, enhancing vehicles’ performance [3]. Convolutional neural network (CNN) based task processing methods are also used in UAVs to perform tasks. CNN maximizes computation efficiency, which increases accuracy in completing tasks. Data processing is essential for task processing to provide appropriate information and reduce delay time in data analysis [4].
Multi-tasking in unmanned aerial vehicles (UAV) is a process that contains complex technology, including multiple aspects, task assignments, operations, functions, and formula control [5]. The multi-task assignment is one of the essential components of a UAV to accomplish specific tasks. UAVs use a dynamic task assignment method to allocate the resources required to perform tasks [6]. A bionic algorithm is used in the task assignment method to identify essential features and produce information for the assignment method. The dynamic task assignment method reduces overall complexity & computation cost [7]. The regression-based learning method is used as a multi-task assignment in UAVs. The global positioning system (GPS) provides vehicles’ exact location, reducing time delay in identification [8]. GPS sends signals to regression methods that perform multi-tasks in UAVs. Aerial manipulators (AM) are also used in multi-task assignment systems in UAVs [9]. AM identifies the exact reason to perform tasks that provide appropriate strategies for UAVs. Characteristics and functions of multi-tasks are analyzed to produce optimal details for task assignment methods. Tactical planning and task allocation provide relevant information for multi-task assignments in UAVs [10].
Optimization methods are widely used for UAVs. The risk-based path planning optimization method is commonly used in UAVs for task processing-path planning technique schedules tasks based on certain conditions and patterns [11]. Path planning techniques reduce computation costs in task processing, improving UAV’s efficiency. The risk-based optimization method reduces risk in task processing, improving UAVs’ performance [12]. The Wireless sensor-based optimization method is also used in task processing. Wireless sensors get data via signals and produce optimal information for task processing. Wireless sensors reduce time delay in data analysis, enhancing UAVs’ feasibility [13]. The neural network (NN) based optimization method is commonly used for unmanned aerial vehicles. NN understands the exact reason that produces data for task allocation in UAVs. NN improves computational efficiency during task processing [14]. The route optimization method for UAVs is used to perform task processing. Genetic algorithm (GA) and nearest neighbor (NN) algorithms are implemented in the optimization method to identify problems presented in task processing. GA improves the effectiveness level of UAVs [15].
Unmanned Aerial Vehicles (UAVs), controlled remotely, play a vital role in various tasks, necessitating effective task-processing mechanisms. Digital photogrammetry is employed for data processing in drones [1], contributing to the execution of tasks. Conceptual models are pivotal in UAVs, comprehending precise objectives and enhancing reliability and performance through the identification of hierarchical task structures [2, 3]. Convolutional Neural Networks (CNNs) are utilized to maximize computation efficiency, increasing accuracy in task completion [4]. Multi-tasking in UAVs involves complex technology, encompassing various aspects, task assignments, operations, and formula control [5]. Dynamic task assignment methods employing bionic algorithms significantly reduce overall complexity and computation costs [6, 7]. Regression-based learning methods, aided by the Global Positioning System (GPS), contribute to efficient multi-task assignments by providing exact vehicle locations and reducing identification time delays [8]. Aerial manipulators (AM) further optimize multi-task assignment systems by analyzing characteristics and functions [9, 10]. Optimization methods, such as risk-based path planning, wireless sensor-based optimization, and neural network-based optimization, enhance UAV efficiency [11, 12, 13, 14]. The route optimization method, integrating genetic algorithms (GA) and nearest neighbor (NN) algorithms, addresses task processing challenges, improving overall UAV effectiveness [15]. These diverse optimization approaches collectively contribute to advancing UAV capabilities, reducing computation costs, and enhancing feasibility, thereby establishing UAVs as efficient and adaptable tools across various applications.
The advantages of the PSO are its swift convergence time, powerful search capacity, excellent robustness, and easy calculation [16]. The PSO algorithm’s design makes it prone to local convergence and challenges finding the most influential global solution.
The traditional algorithms frequently resort to local optimum solutions when confronted with optimization challenges. Optimizing multi-UAV assigned tasks requires developing an optimal plan for UAVs that considers limits. Improving population variety is the main aim of the aforementioned upgraded strategies, albeit it may influence the algorithm’s integration.
Issues with autonomous navigation and adaptive vehicle grouping lead to incomplete tasks and delays. To tackle this problem, this research introduces a Particle Swarm Optimization-dependent Multi-Task Assignment Model (PSO-MTAM).
The essential characteristics of UAVs include portability, adaptability, ease of deployment, versatility, and adaptable use, contributing to their popularity [17]. The rise of computerized and drone technologies has sparked a growing interest in multi-UAV combat with completely independent management capability. The problem is that a single, underpowered drone can’t keep up with the increasing number and volume of jobs. Backlogs and incorrect job completion are outcomes of the autonomous guidance and adaptable vehicle grouping problem. For this reason, this article presents PSO-MTAM, a Particle Swarm Optimization-dependent Multi-Task Assignment Model. The completion technique can estimate the first local best solution (best) by looking at specific jobs’ assignments and completion rates. Making it to the last step is crucial for the second local best (best) solution. The swarm locations are quickly determined, and the final global best is generated by the synchronous best solutions (task progression, conclusion, and handling). Reassigning or re-initializing the swarm objects brings attention to the solutions that developed the backlog.
The main contributions of the article include:
Adaptive vehicle grouping with a Particle Swarm Optimization-dependent Multi-Task Assignment Model (PSO-MTAM) ensures timely completion of tasks while minimizing backlogs. This completion technique estimates the first local best solution (best) utilizing a single task’s completion and assignment rate. The final stage is required for the second local best (best) solution. The convergence of the above solutions in task progression (completion) and handling density (multi-task) determines the global solution. Immediately identify swarm positions and generate the best global solution from synchronous best solutions (task progression, completion, and handling). Reassigning or re-initializing swarm objects revisits backlog-generating solutions. The suggested model’s effectiveness is evaluated by assessing its task handling rate, completion ratio, processing time, and backlogs.
A summary of the research is provided below. In Section 2, the current literature and study techniques are thoroughly examined. The research strategy, methodology, study case selection, data collection, and processing procedures are detailed in Section 3. The results analysis is covered in Section 4. Part 5 explores the main conclusions.
In recent research, multiple innovative task allocation and resource optimization methods have been proposed for Unmanned Aerial Vehicles (UAVs) to enhance their efficiency and effectiveness in various applications. Yu et al. introduced a collaborative task offloading and resource allocation scheme for UAV-based Mobile Edge Computing (MEC), utilizing IoT-enabled devices to identify necessary resources [18]. Wu et al. proposed a genetic algorithm (GA)-based task allocation method for multi-UAVs, improving stability, accuracy, and effectiveness compared to other methods [19]. Wang et al. developed a joint optimization method for large-scale mobile users, aiming to reduce energy and time consumption levels in multi-UAV systems [20]. Another study by Wang et al. presented a task-offloading framework for UAV-enabled MEC, reducing overall optimization problems and minimizing energy consumption [21]. Hu et al. designed a pigeon-inspired fuzzy multi-objective optimization algorithm for task allocation, utilizing fuzzy algorithms and a pigeon-inspired optimization algorithm to reduce energy consumption levels [22].
Wang et al. proposed a wolf pack method-based task allocation algorithm for UAV swarm (WTA-UAV), showcasing high efficiency and reduced computation costs [23]. Chen et al. introduced a multi-objective ant colony optimization method (MOACO) for UAV task allocation, enhancing both the speed and quality of task allocation [24]. Kim et al. developed a grouped consensus-based bundle algorithm (G-CBBA) for multi-UAV, achieving high efficiency and reduced delay time in task allocation [25]. Ye et al. introduced an improved consensus-based bundle algorithm (CBBA) to solve optimization problems in heterogeneous multi-UAV, increasing reliability, feasibility, and performance [26]. Xu et al. proposed a task allocation method using a mathematical model and a genetic algorithm (GA) for crowdsensing in UAVs, achieving high accuracy and efficiency [27].
Sun et al. designed a UAV task allocation system utilizing the Dragonfly algorithm, focusing on the agricultural plant protection environment and improving efficiency [28]. Yao et al. developed an online algorithm for task allocation in fog-aided Internet of Drones (IoD), achieving high accuracy and efficiency in solving optimization problems [29]. Aljalaud et al. introduced a new task allocation system for multi-UAVs using area-restricted search, enhancing both feasibility and efficiency [30]. Yang et al. proposed a resource-constrained task allocation method (RCPIA) using a performance impact algorithm (PIA) for multi-UAV, maximizing efficiency and feasibility [31]. Gao et al. proposed a grouping ant colony optimization algorithm for heterogeneous multi-UAVs (GACO for multi-UAVs), achieving high task allocation accuracy and better overall performance [32]. These diverse methodologies contribute to the evolving landscape of UAV technologies, offering improved solutions for task allocation, resource optimization, and overall system performance.
The research projects began by narrowing their focus to a single use case for UAV Multi-Task Assignment Modeling. Then, the model is fine-tuned using the age-old algorithm. The last step in improving job planning efficiency is verifying the scheme. An adaptive marine UAV assignment planning system is the aim of this paper. However, Research on PSO-MTAM seldom considers the possibility of an ammo shortage, the risk of UAV destruction, or the failure to complete the mission. For this reason, it is critical to create a risk-based model and an optimization method for PSO-MTAM that can handle scenarios with varying ammo amounts.
System methodology
Particle Swarm Optimization-dependent Multi-Task Assignment Model
Particle Swarm Optimization-dependent Multi Task Assignment Model (PSO-MTAM) is used to address the problem of automated navigation and the adaptive group of the results of the vehicle in improper task completion and backlogs. Unmanned Aerial Vehicles (UAVs) are interconnected to perform specific tasks through self-routing and air-borne communications. The tasks are assigned to the UAV drones so they can reach the destination without any backlogs. The UAV communicates to another UAV with the given assignments to strike the desired depot. These drones share their redundancy and data to reach the target with concurrency. The tasks assigned to the drones must be efficiently optimized. One drone can debate with the other drone that it has harmonious plans that can interconnect. It should have the congruous countenance to reach the swarm after the assigned tasks to reach the destination. Mostly, UAVs use self-routing communications to process the best solution to attain the target. It constantly updates its route and knowledge to keep the process consistent. UAV has the potential to process multi-tasks at a time. It always communicates through the entire high bandwidth to facilitate task management. Figure 1 presents the proposed model.
Proposed PSO-MTAM.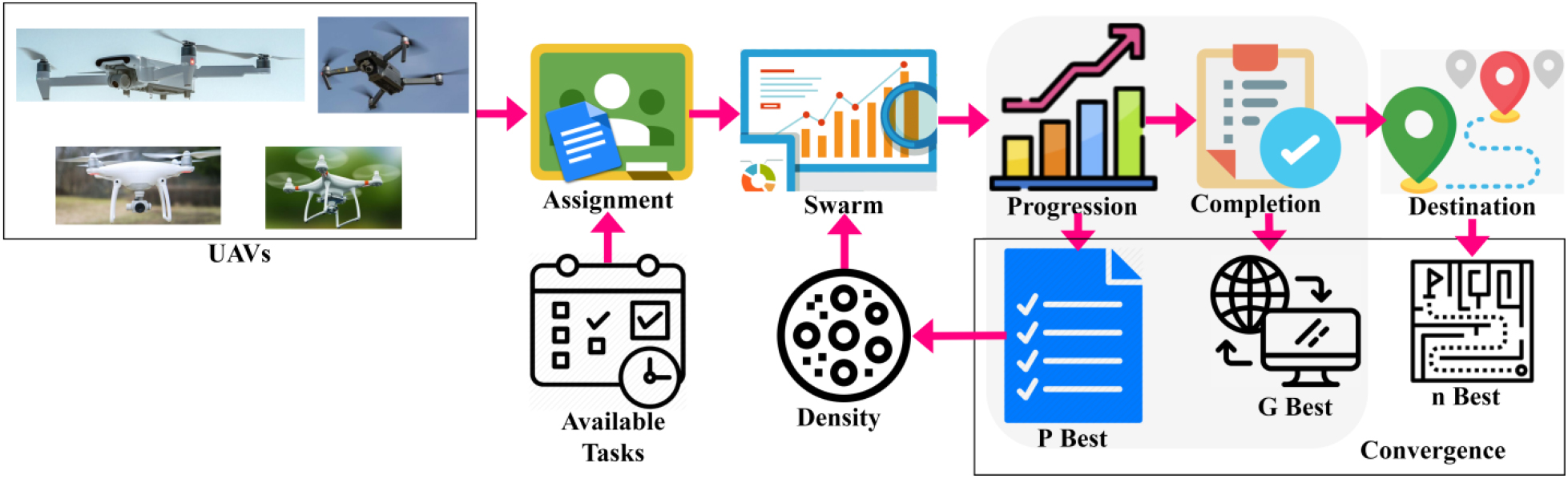
If the UAV is assured that it is consistent with the other UAV, then the processing plans get generated and executed. If it is inconsistent, the best solution for the assigned task cannot be found, and the plans will not be implemented to their destination. Air-borne communications can control UAVs, and they also have the capability of wireless communications for processing tasks and finding the best solution. It helps to develop the conclusion using air-borne and self-routing communications in UAVs. It enables the Particle Swarm Optimization model to eliminate the backlogs and hounding of the signals effectively. To avoid controversies, the UAVs must communicate their process information with the PSO and find any solutions for the data backlogs. These drones are equipped with mini building blocks for storage tasks and modules to associate the data from the devices and then process further functions to reach the destination without backlogs. The drone placements, allocation of the tasks, and the bandwidth through which they traveled were noted in the UAVs before the initialization of the process. As a computing server, it helps users complete tasks and find the best solution to reach the desired destination. The allocation of the functions for UAVs can be expressed as the equation given below:
Here, capacity
The PSO algorithm begins with swarm and parameter initialization. Initial velocities, particle positions, and personal best positions must be defined within the framework of the basic PSO, together with the velocity parameters c1 and c2.
Regarding emergencies involving remote sensing inquiry, the UAV swarm scheduling challenge is about finding a way to make each UAV make the most of its operational abilities to gather data from different spread job areas. UAVs’ primary functions include surveys and strategic planning. Those working in emergency response now have access to this technology, which will significantly benefit the crew. The constraints of the UAV include short flight times, poor autonomy, restricted mobility, and short battery lives.
UAVs that balance their loads can fly themselves, be controlled remotely, or use a combination of the two. They can also carry weapons that disrupt or destroy enemy targets, such as sensors, objective designators, offensive munitions, or electronic transmitters.
One significant benefit of PSO is the reduced number of tuning variables. Because it uses a multidimensional search space, PSO convergence occurs slowly to the global optimum, but it gets the best answer from the interaction of particles [33]. Not to mention that it produces low-quality outcomes when dealing with complicated and extensive datasets.
Compared to mathematical algorithms and other empirical optimization methods, the PSO algorithm has several benefits, the most important of which are its computational efficiency, simplicity of idea, ease of implementation, and resilience to control factors. Maximum number of iterations, Iter current number of iterations
If (t
The enhanced method converges and shows better population diversity than the conventional approach. The goal and choice constraints are satisfied, and the algorithm is even better regarding population diversity and convergence.
Here, particle swarm optimization is used for cooperative processing and task management. It will help reduce the execution time of the process, and it can run multiple processes of a single graphical unit. There are several steps to finding the convergence and destination. They are the progression process and the completion process. It is not sensible to start stages of the process and the functions in the tasks, and it can accommodate the many search operations through the small number of particles used in the task completion process without any backlogs. Compared with the other methods, PSO is used to find the best solution for consistent convergence with a curtailed processing time for the tasks assigned. The execution time does not require any additional changes in the process, and it is also very intelligible during the implementation time of the task process. The optimization process is schematically represented in Fig. 2.
Optimization process.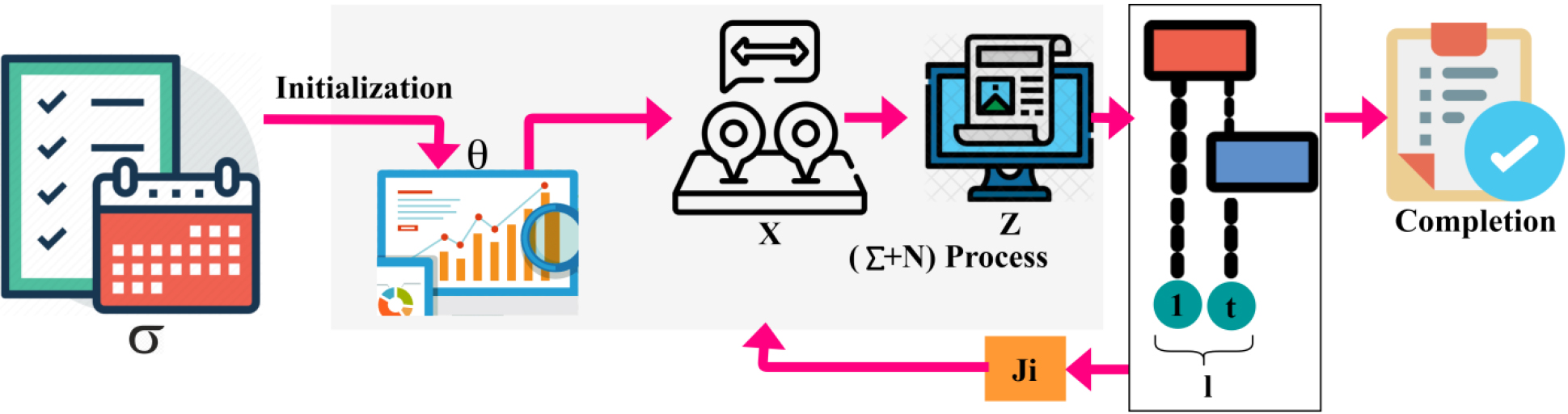
The
Here, the angular displacement of the swarm
The different swarm stages are verified for the task progression, resulting in completion at the final stage. It is used to check whether the Unmanned Aerial Vehicles (UAVs) are moving correctly or not. The output from the swarming process is sent to the progression to check whether it has backlogs or any errors. It will be reviewed and forwarded to the final process of the completion stage to reach the destination with the best solution.
The entire swarm optimization process is verified and monitored by the progression, and it is always used to keep the backup information – the development of UAVs results in a clear vision of task processing. The physical process in particle swarm optimization (PSO) can be corroborated and monitored through the operations of UAVs. Thus, the process done by the progression is authenticated, and then it can produce the particle solution. The communications through the airborne and self-routers can be recorded in the programmed results of the progression process. It is also used to find complex and highly converging solutions to reach the target destination. It also schedules the upcoming completion process activities at the destination’s final stage. Finalizing optimization requires the progression to verify swarm task alignment and provide the target particle solution. Progress monitoring is mainly associated with the backups of the current status of the tasks that the alignment process has performed. It can fleetly record the information by using the programmed swarm optimization. However, swarm optimization helps record data, collect tasks, determine task density, address the backlogs, find errors, and select the input tasks’ flow. Also, the progression in physical verification helps communicate the work and generates a suitable nostrum. One UAV should integrate with the other UAV to pass the correct information of the progression process to strike the pleasing depot. The progression process can be clearly explained by the equation represented below:
By Eqs (5a), (5b), and (6), the progression process is explained. Now, the complete process takes place in the particle swarm optimization process. After the progression phase, the process comes into the completion phase to reach the desired depot. This completion process thoroughly checks the output of the progression phase and whether there are any backlogs or errors in the previous operations. The task progression is illustrated in Fig. 3.
Task progression.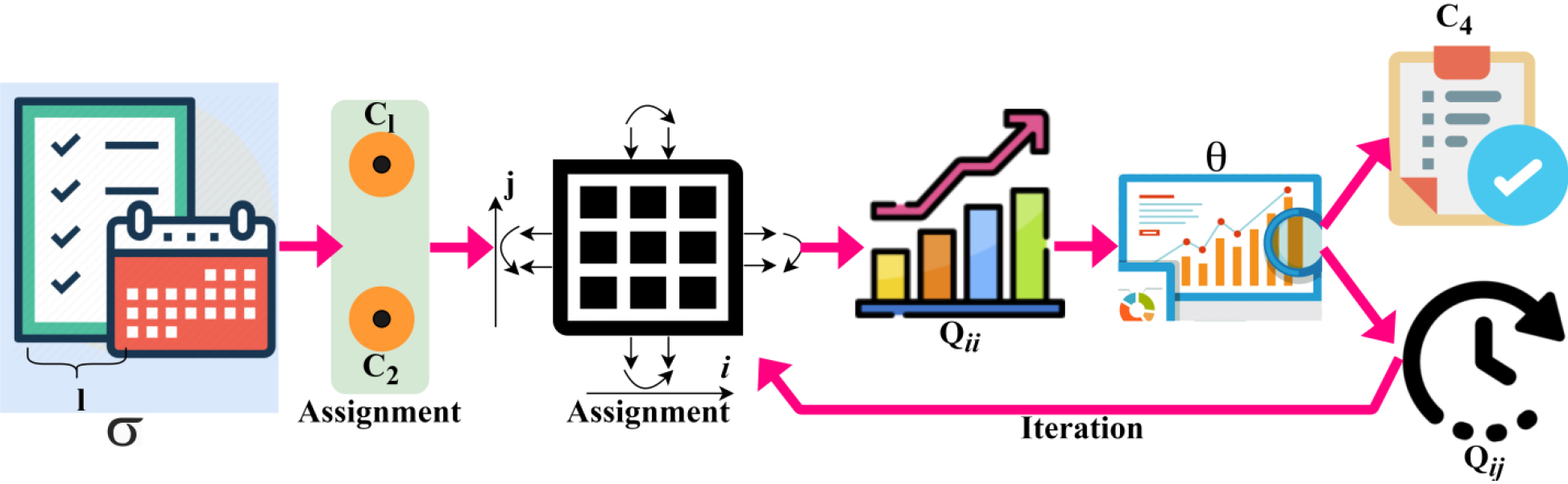
The task progression is performed for
Where the length of the task is denoted as
Equations (10) and (11) explain the destination process. Now, the convergence phase for comparing the solutions takes place. The solution with the high converging point is declared the best solution by comparing these solutions.
The global solution is identified depending on the convergence of the above solutions in task progression (completion) and handling density (multi-task). The swarm positions are immediately identified, and the synchronous best solutions (task progression, completion, and handling) generate the final global best. The solution updates for task completion are presented in Fig. 4.
Solution update.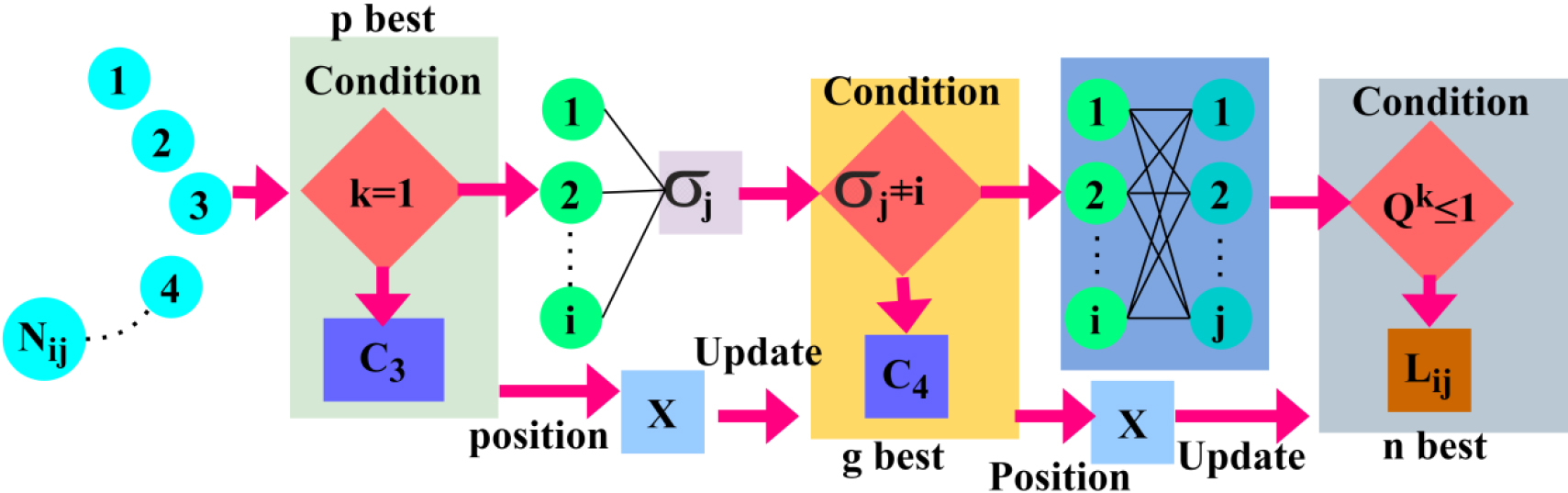
The input
Where
The performance assessment of the proposed model is validated using opportunistic network environment simulations. The scenario is packed with 50 UAV units and four access points deployed in a region of 1000 m*200 m. 1200 tasks are allocated f the available UAVs with a maximum of 70 position updates. The units can sense their direct neighbor within a range of 200 m. This information analyses task handling rate, completion ratio, processing time, backlogs, and convergence cost comparatively. The methods MOACO [22], GACO [30], RCPIA [29], ISAFGA [17], and DTA-WP [21]were considered along the proposed PSO-MTAM.
The assessment for task completion is presented as an example using the simulation parameters. Initially, the UAV representation between two coordinates containing four intermediates (route) is used for illustration. The illustration shows the individual units and the swarm initialization.
Initialization representation.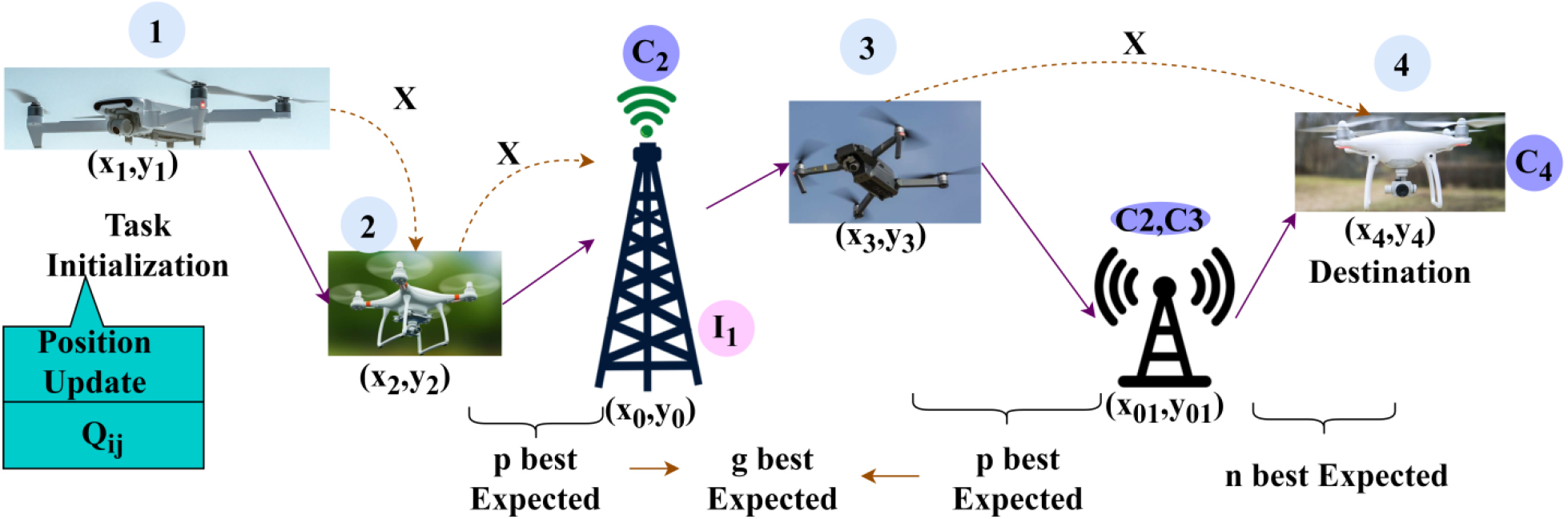
The UAV’s
Analysis based on conditions
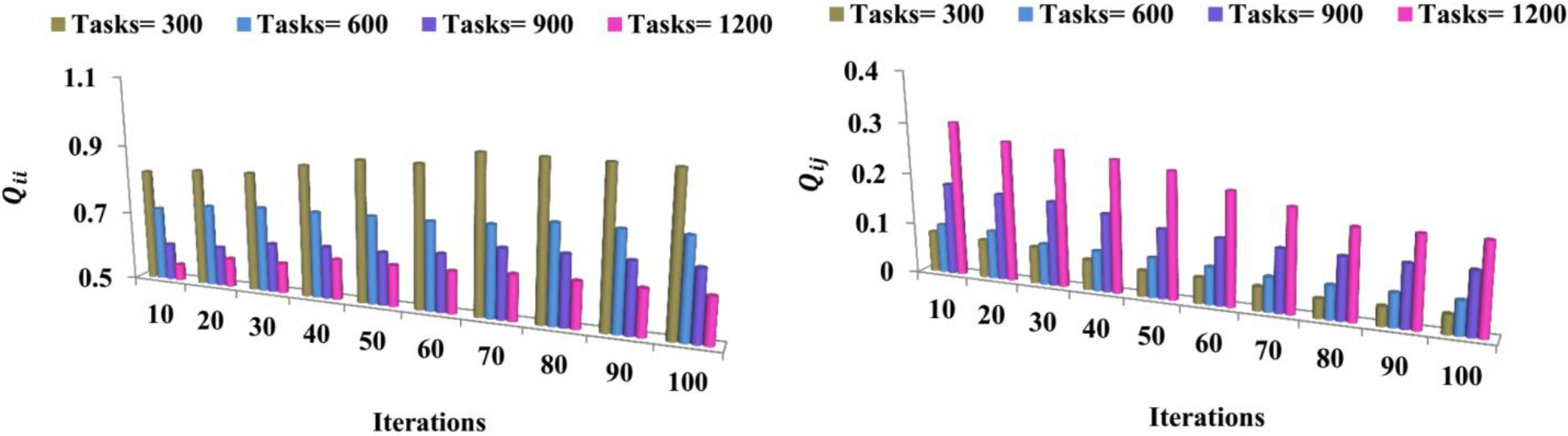
The varying iterations for the above representation are presented in the above table for
The Task density determines the completion & convergence across the varying iterations. It requires maximum best solutions, including
Convergence and completion.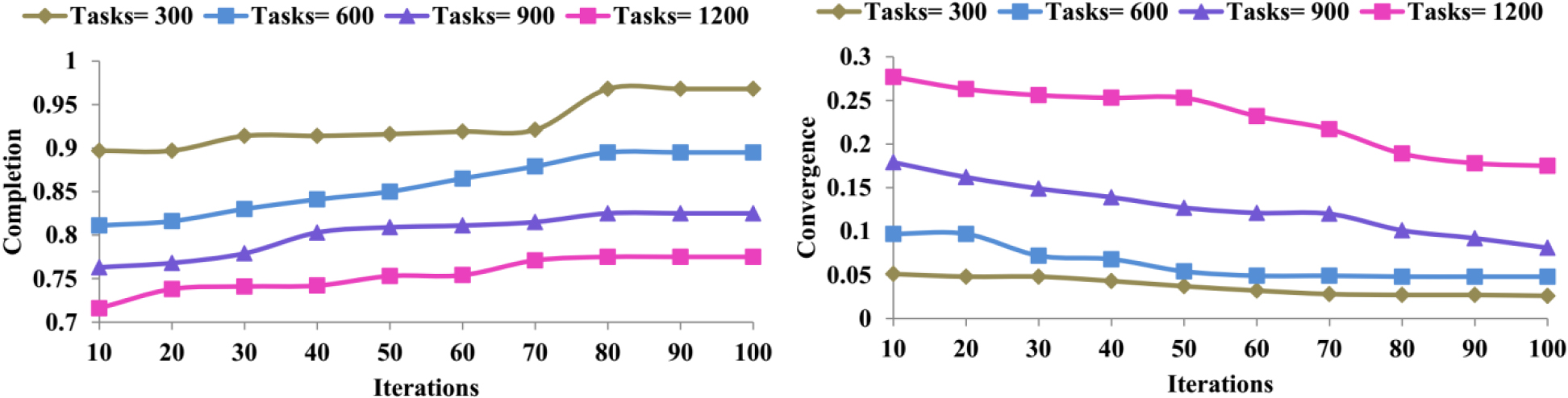
It
The
Task handling rate comparison.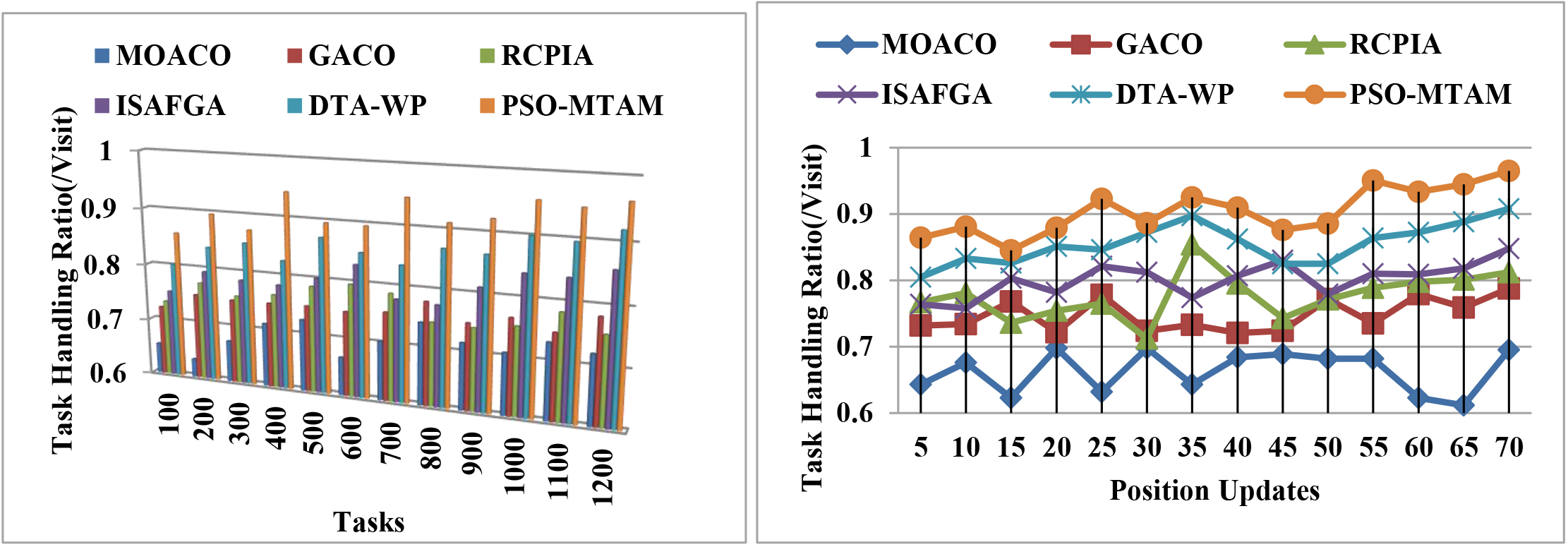
The task handling rate is more productive than the existing methods (Fig. 8). The UAVs are interconnected to perform the tasks through self-routing and air-borne communications. By this, the proposed method identifies errors between the task alignment and swarm optimization processes. It has a congruous countenance to strike swarm without backlogs or mistakes. One UAV communicates with the other to attain the desired depot with the given tasks. The density of the functions is assigned fittingly for all the UAVs so that the task-handling process is maintained conscientiously. The proposed method uses unmanned aerial vehicles with the capability of wireless communication to avoid the hoard (backlogs) and mistakes in the given tasks. The UAV helps the particle swarm optimization (PSO) eliminate the hounding of the signals through which the tasks are assigned. This operation reduced the slips held in the existing methods.
Completion ratio comparison.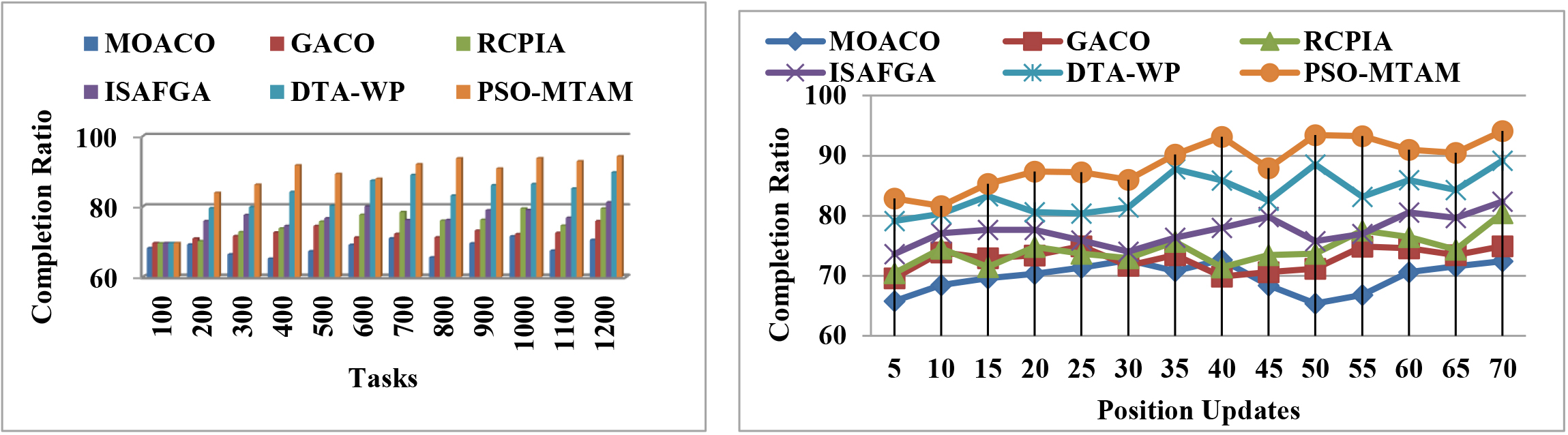
The expeditious completion ratio is high and collated with the surviving methods. This completion process thoroughly checks the output of the progression phase and whether there are any backlogs or errors in the previous operations. After all the processes, the UAVs will be sent to the completion process and reach the desired destination with the best solutions. This proposed method substantiates that the completed optimization is ready to contact the depot without any counterparts with the highly leading solution. In this completion process, the first local solution (p best), the second local solution (g best), and the final solution (n best) are estimated. The best solution to reach the target can be found in all these solutions. So, through this process, the completion ratio gets higher in this proposed method than in the other existing methods (Fig. 9).
Processing time comparison.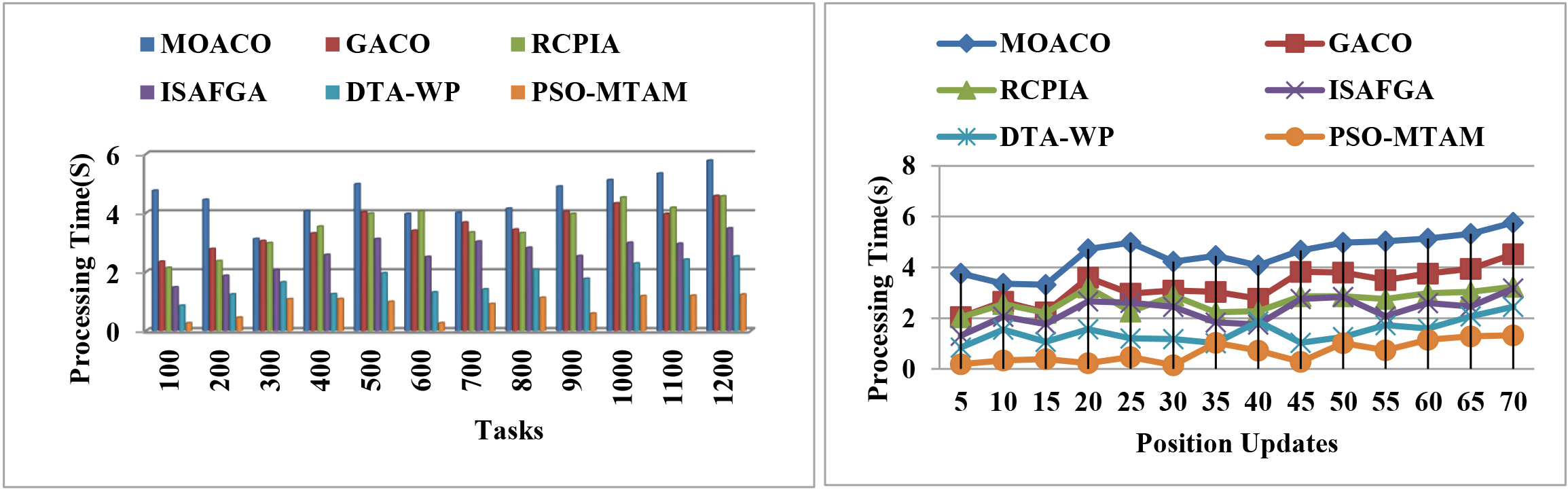
The processing time for the optimization process is less when compared to the existing methods. Here is the output from the swarming process sent to the progression to check whether it has backlogs or any errors. It will be reviewed and forwarded to the final process of the completion stage to reach the destination with the best solution. If any backlogs are found, it automatically corrects its errors quickly. The entire swarm optimization process is verified and monitored by the progression, and it is always used to keep the backup information. The processing time gets reduced as the above processes do their operations in the correct order, and the measurements of the tasks are aligned with the UAVs. The particle optimization process finds the best solution without any time lag between the UAV processes. So, it takes less processing time than the other methods (Fig. 10).
Backlogs comparison.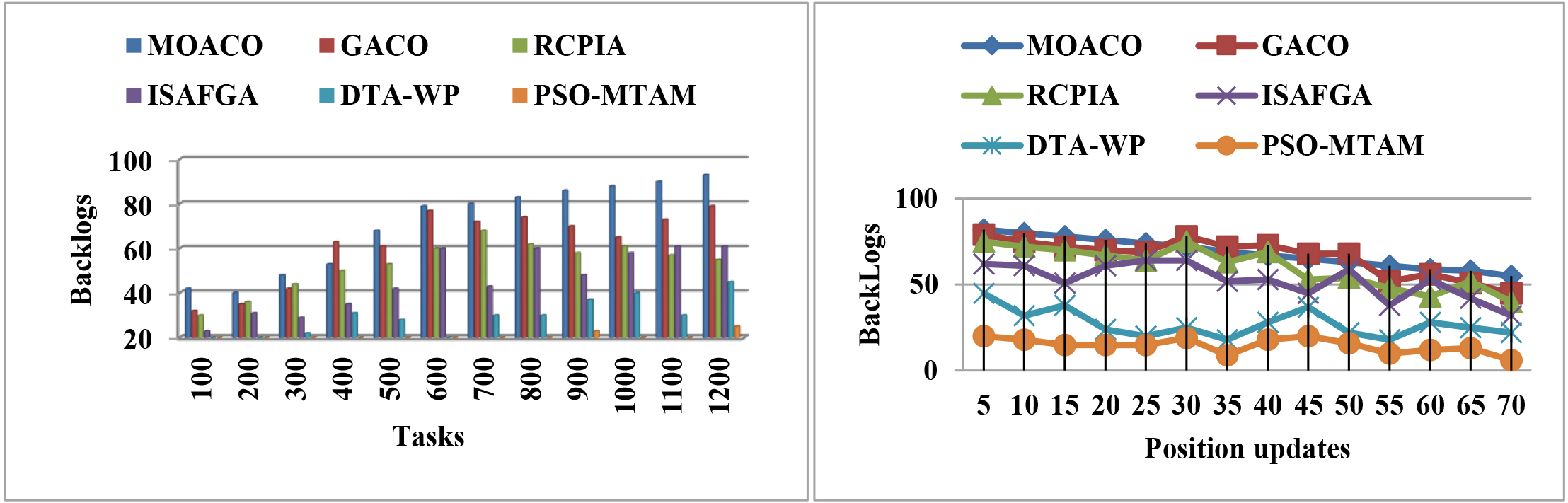
Compared to the extant methods, the backlogs in the proposed method are lesser. The particle swarm optimization finds the backlogs; if anything exists, it is precise by identifying the exact determination. In this proposed method, all the processes that had been effectively completed diminished the endured backlogs and found the finest nostrum. The swarm optimization, which is the imaginary particle, helps to promote the running process to the next level without any backlogs and errors. While assigning the task for the UAVs using the PSO, the backlogs were corrected simultaneously when the procedure was being processed. In these ways, the backlogs are lesser than the existing methods (Fig. 11).
Convergence cost comparison.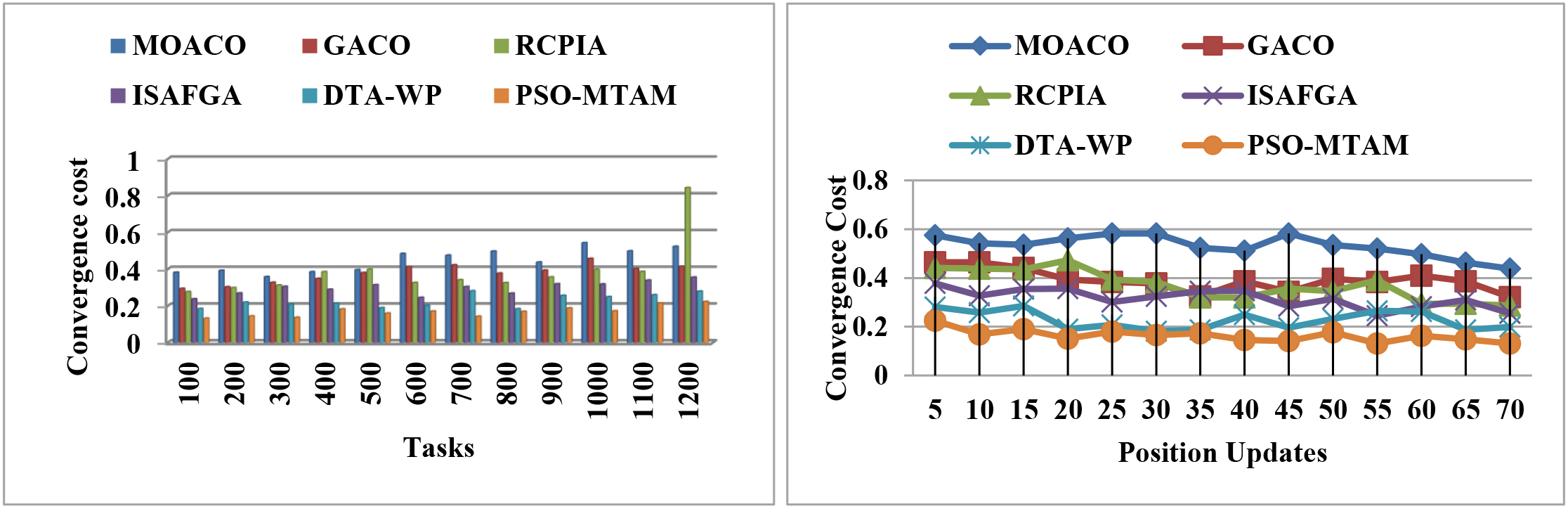
This proposed method’s convergence cost is less than the subsisting methods. It is declared the best solution by comparing the solutions with a high melting point. The global solution is identified depending on the convergence of the above solutions in task progression (completion) and handling density (multi-task). The swarm positions are immediately identified, and the synchronous best solutions (task progression, completion, and handling) generate the final global best. This process does not require much cost to find the best solution. If there is a backlog, it can revisit the swarm objects quickly at a lower cost. So, the convergence cost is lesser in the proposed method than in the existing methods (Fig. 12). The comparison presented above is reviewed in Tables 3 and 4 for the tasks and position updates.
Review for tasks
The proposed model improves the task handling rate and completion ratio by 11% and 12.02%, respectively. It reduces the processing time, backlogs, and convergence cost by 10.84%, 9.91%, and 12.7%, respectively.
Review for position updates
The proposed model improves the task handling rate and completion ratio by 11.65% and 11.99%, respectively. It reduces the processing time, backlogs, and convergence cost by 10.1%, 13.64%, and 12.74%, respectively.
This article discussed the multi-task assignment model in UAVs for improving task handling and completion ratios. The conventional particle swarm optimization aids this model in confining backlogs and improving convergence. Swarm initialization and processing are performed by verifying task progression and completion between the neighboring UAVs and the destination. In particular, the best, best, and best features are validated for convergence using the task handling density. The multi-task assignment and its length are considered for swarm initialization, progression, and completion. Therefore, the task alignment is instigated among the intermediate swarms based on their capacity. This validation requires solution and position updates from the intermediate UAVs to improve the handling rate. The iterations are repeated until complete across different task densities and less convergence. The proposed model improves the task handling rate and completion ratio by 11% and 12.02%, respectively. It reduces the processing time, backlogs, and convergence cost by 10.84%, 9.91%, and 12.7%, respectively.
In addition, analysis of the assigned approach’s real-time efficiency shows that the suggested method is not very sensitive to the swarm size of UAVs. Though it raises computing needs, the proposed technique improves population variety and keeps convergence to a certain degree. Fixing these shortcomings and improving the algorithm will be the focus of future efforts. The successful rate of UAV strikes will also be considered in future studies, especially in scenarios requiring the execution of several missions.