
Abstract
With the rapid development of computer technology, parameter adaptive control methods are becoming more and more widely used in nonlinear systems. However, there are still many problems with synchronous controllers with multiple inputs and a single output, uncertainty, and dynamic characteristics. This paper analyzed a synchronization control strategy of uncoupled nonlinear systems based on parameter dynamic factors to adjust the performance of the synchronization controller, and briefly introduced the manifestations of chaotic motion. The characteristics and differences of continuous feedback control methods and transmission and transfer control methods were pointed out. Simple, effective, stable, and feasible synchronous control was analyzed using parameter-adaptive control theory. By analyzing the non-linear relationships between various models at different orders, the fuzzy distribution of the second-order mean and their independent and uncorrelated matrices were obtained, and their corresponding law formulas were established to solve the functional expression between the corresponding state variables and the dynamic characteristics of the system. The error risk test, computational complexity test, synchronization performance score test, and chaos system control effect score test were carried out on the control algorithms of traditional chaos system synchronization methods and chaos system synchronization methods based on parameter adaptive methods. Parameter adaptive methods were found to effectively reduce the error risk of high-performance control algorithms for synchronization of the unified chaos system. The complexity of the calculation process was simplified and the complexity score of the calculation process was reduced by 0.6. The application of parameter adaptive methods could effectively improve the synchronization performance of control algorithms, and the control effectiveness rating of control algorithms was improved. The experimental test results proved the effectiveness of control algorithms, which greatly enriched the field of modern control applications and also drove the vigorous development of nonlinear dynamics research, thus making significant progress in chaos application research.
Keywords
Introduction
With the rapid development of computer technology, integrated block theory, intelligent algorithms, and parallel processing in modern nonlinear control fields, it has become increasingly important to analyze the interrelationships and impacts between model parameters. Many intelligent control algorithms have been widely applied in complex systems, but these technologies also have some problems that cannot be solved or are satisfied with local optima. Under traditional synchronous control methods, each order in the system exists independently and cannot be accurately described. Although traditional synchronization methods can achieve good performance indicators, they cannot adapt to various dynamic and multivariate situations due to the nonlinear relationship between parameters. The research on the stable and stable operation of asynchronous motors based on parameter adaptive methods is of great significance.
This paper investigates a high-performance control algorithm based on parameter adaptive methods for the synchronization control of unified chaotic systems. The application of parameter adaptive control methods in nonlinear systems is introduced, along with a proposed strategy for decoupling the synchronization control of nonlinear systems. Through the analysis of chaotic motion forms and control method characteristics, the analysis of parameter adaptive control theory is introduced. The results indicate that parameter adaptive methods can effectively reduce error risks, simplify computational complexity, and improve synchronization performance and control effectiveness scores. Experimental verification confirms the effectiveness of this control algorithm, providing important support for modern control applications and nonlinear dynamics research, and advancing the progress of chaotic application research.
The overall framework of this article is as follows: Part 2 reviews the existing literature, Part 3 investigates synchronization control algorithms for unified chaotic systems, Part 4 studies synchronization control of chaotic systems based on parameter adaptation, Part 5 analyzes the impact of parameter adaptation methods on synchronization control algorithms for unified chaotic systems, and Part 6 concludes the entire document.
The innovative contributions of this article include:
A high-performance control algorithm based on parameter adaptive methods enhances the reliability and stability of chaos system synchronization control.
Analysis of the characteristics and differences between continuous feedback control methods and transmission and transfer control methods, providing new information for chaos system control.
Experimental verification shows that the parameter-adaptive method effectively reduces the error risk of chaos system synchronization control algorithms and improves the system’s synchronization performance and control effectiveness.
Related works
Many researchers have conducted research on synchronization control algorithms for unified chaotic systems. Wang Leimin proposed a unified framework to solve the synchronization problem of the memristor chaotic system through sliding mode control. Using the proposed unified framework, the finite-time and fixed-time synchronization of the memristor chaotic system could be realized simultaneously, which proved that the error track was close to and reached the designed sliding mode surface [1]. Ouannas Adel proposed a new secure communication method by combining chaotic modulation, recursive encryption, and chaotic masking into a single scheme, which was achieved by designing control laws. Through backstepping technology, two hyperchaotic Lorentz systems were synchronized with the encryption state, which verified the effectiveness of the proposed chaotic-based encryption scheme [2]. Ren Ling studied the projection synchronization problem of switched chaotic systems composed of unified chaotic systems and designed an adaptive global linear feedback controller with one single input channel, which could achieve projection synchronization under any switching law. The results of the numerical simulation verified the correctness and effectiveness of the proposed method [3]. An Hongli extended the cascade synchronization of integer-order chaotic systems to the function cascade synchronization of fractional-order chaotic systems. He synchronized a scaling function with another system through a fractional-order chaotic system, making this method more versatile than existing methods [4]. Xu Chuancan generated a dual-mode process based on the jump mode of the chaotic system and the mode of the asynchronous controller. By introducing a hidden Markov model, the asynchronous phenomenon between the controller and the chaotic system was represented, and the effectiveness of the proposed controller was demonstrated through two examples [5]. The above research achieved good results, but no improvement was made to the control algorithm.
Many scholars have applied parameter-adaptive methods to chaotic systems for synchronization control. Ahmad Israr designed a new robust adaptive synchronization control algorithm that allowed uncertain parameters to excite second-order nonlinear pendulum chaotic systems and achieve full-order synchronization. The proposed adaptive synchronization control algorithm successfully synthesized the oscillation-free convergence of the synchronization error signal to the origin and reduced the transient time, to ensure the asymptotic stability of the origin [6]. Tirandaz Hamed proposed an adaptive linear feedback controller to control the behavior of financial chaotic systems and the same/different synchronization with unknown system parameters. He introduced an adaptive linear feedback controller and added it to a nonlinear chaotic system to achieve synchronization. The effectiveness of the proposed method was verified through numerical simulation [7]. Xi Xiaojian proposed an adaptive robust finite-time control method based on global sliding surfaces for synchronization of a class of chaotic systems. New control law aimed at ensuring the elimination of stretching patterns and achieving the existence of sliding patterns around the design surface from the beginning. The proposed adaptive tuning controller eliminated the requirement of interference boundary knowledge [8]. Khan Ayub used two control methods, the tracking control method and the parameter estimation adaptive method, to handle the mixed synchronization of dislocations between chaotic systems with different structures of real integer order and complex fractional order. Numerical simulations were performed using Matlab to validate the effectiveness of the two methods and help compare the results [9]. Mofid Omid proposed an adaptive sliding mode disturbance observer design technique for synchronizing fractional-order chaotic systems with time-varying disturbances. The proposed control technology satisfied the requirement that the state of the fractional order main chaotic system was hastily synchronized. He provided simulation results through numerical examples to verify the effectiveness of the proposed scheme for fractional-order chaotic systems in the presence of external disturbances [10]. The above studies have demonstrated the improved effect of adaptive methods on synchronizing chaotic systems. However, there are still shortcomings in research on high-performance control algorithms. Therefore, it is necessary to further explore and develop high-performance control algorithms suitable for chaotic systems.
Investigation of the synchronization control algorithm for unified chaotic systems
System Model:
The dynamic behavior of chaotic systems is represented using mathematical equations, including definitions of parameters and variables, as well as descriptions of system state equations. An adaptive control strategy is employed to dynamically adjust control parameters based on the state of the system, achieving synchronized control of chaotic systems. A sliding-mode control strategy is utilized to achieve stable control of the system by switching control surfaces. Parameter adaptive methods are used to dynamically adjust the parameters of the synchronization controller to accommodate dynamic changes in chaotic systems. Chaotic system synchronization is achieved through sliding mode control to ensure the sliding of the system state on the control surface.
Problem definition:
How to establish a mathematical model of chaotic systems to describe the dynamic behavior and control strategies of the system. How to design parameter adaptive control methods to achieve synchronized control of unified chaotic systems. What are the differences in synchronized control performance between parameter adaptive methods and traditional control methods and what are the reasons for these differences? How to evaluate and compare the performance of synchronization and control effects of different control algorithms to determine the optimal control strategy.
Mathematical representation of chaotic systems
Chaotic systems are complex deterministic systems. Its behavior is uncertain, unpredictable, chaotic, and disorderly, but also exhibits certain patterns [11, 12]. As chaos theory intersects with many other disciplines, different fields have different definitions of chaos, which can be defined from different perspectives and ways [13, 14]. Therefore, to this day, there is no unified definition of chaos, which can be represented in the following three forms.
Li-Yorke chaos definition
If
If the following conditions are met,
(1)
(2) The period of the period point
(3) There are countless subsets
For each
For any period point
The mathematical definition of chaos from the perspective of sets clearly illustrates the manifestation of chaotic motion. There is at least one unstable non-periodic orbit. There are countless fixed aperiodic orbitals and countless orbitals. There are countless fixed periodic orbits whose trajectories are measurable.
Devaney chaos definition
If the mapping
Topological transitivity: For each open set There is a sensitive dependency on the initial value, which is The set of periodic points is dense everywhere in
Chaotic motion is a dynamic phenomenon that exhibits similar random but irregular motion in deterministic systems and is an unstable finite motion. In chaotic systems, the dynamic formulas of system evolution, such as ordinary differential formulas and time-difference formulas, are described without random terms. In a chaotic system, there must be a non-linear element, and chaos cannot occur without nonlinearity; therefore, non-linearity is a necessary condition for chaos. Chaos has a strong dependence on initial values because small changes in initial values can lead to significant differences in system motion after some time. The inherent randomness of chaotic systems is determined by the extreme sensitivity of the system itself to the initial values, without any external interference. In the case of a certain chaotic system, a certain initial input value would yield different results, so there is inherent randomness in chaotic motion.
Chaotic systems cannot make long-term predictions and are sensitive to initial values. A very small change in the initial values can cause significant changes in the motion of the system over a long period, making it impossible to make long-term predictions. The path curve of chaotic motion would never repeat the original curve and is closed, thus meaning that chaotic motion would never find the original path again in the same state. Universality refers to the common characteristics of different hybrid systems, which are not dependent on specific formulas or system parameters, but mainly reflected in constants.
Chaotic system control methods
The main typical control method for chaotic systems is the adaptive control method, which has great advantages compared to other control methods [15].
The form performance of special nonlinear systems is often very complex, such as chaotic systems, which cannot be realized by the traditional direct control design method [16]. It is very difficult to achieve a good control effect, so scientists developed the theory of adaptive control. Firstly, assuming that two systems are synchronized, a controller is selected based on their synchronization conditions, and self-adaptive speed parameters are calculated to enable the system to synchronize, thus enabling the system to process through adaptive control.
Compared to adaptive control methods, sliding-mode variable structure control is a unique nonlinear control method. The sliding-mode variable structure control is an adjustable control state that can be continuously adjusted along the target state at any time in the current state of the system [17, 18]. This can achieve full dynamic control and fast response of the system. However, in reality, the implementation process of this controller is relatively complex and not easy to complete. This article used an adaptive control method. In the process of applying control, when the motion state slides on the sliding surface, it would not immediately converge but would produce a jitter that gradually stabilizes, thereby affecting the accuracy of control and causing fluctuations in the results.
Through continuous development, adaptive control technology has gradually matured and has become one of the important methods for studying chaos synchronization theory. In the control process of the system, this method can be used to adjust its control parameters. The controller satisfies certain adaptive laws and dynamically adjusts the state frequency between the two systems anytime and anywhere, thus achieving the goal of controlling the synchronization of the chaotic system. In system control, adaptive control has unique advantages. Especially in the presence of uncertainty, this is because it has the characteristic of automatic adaptation, that is, the stability of the system can be guaranteed even in the presence of unknown parameters.
Feedback, as the main concept and design method of system design, plays an important role in the application of control theory. Adaptive control feedback technology is widely used in the control of continuous chaotic systems because of its simple physical implementation and ease of design. In modern control theory, systems are often represented by their internal states, which means that state feedback methods are not limited to output signals [19, 20]. At present, there are two main types of state feedback. One is to select a portion of the output signal as the state feedback signal, and the other is to extract the signal from the system itself to complete the feedback design. The use of state feedback can arbitrarily configure the poles of closed-loop systems, which is an important tool for system decoupling and designing linear optimal controllers.
Chaos stabilization
Chaos stabilization is the suppression of chaotic phenomena, and different control strategies can be selected based on the target and the method of controlling chaos.
OGY control method
The essence of this control method is to utilize existing control laws by analyzing the system and adjusting the controlled system parameters, thus making the system closer to the target trajectory the next time. This is achieved by defining a non-constraint point and a target trajectory. As the system moves, the target trajectory is adjusted to make the system trajectory closer to the non-constraint point when it reaches the non-constraint point. To further reduce the distance between the system trajectory and the stationary point, it is necessary to continuously adjust the system parameters to make the target trajectory approach the stationary point within each cycle, to achieve stable control of the target system and stabilization of periodic trajectories. This is the ideal situation for constant control. However, in practice, due to the constantly changing system, the implementation of tracking control is computationally expensive and inefficient.
Continuous feedback control method
Due to the OGY (prefix of surnames in the names of scholars Ott E., Grelogi C., and Yorke J.A) control strategy requiring prior analysis of the coordinates and parameters of the attractor, as well as the need to continuously manipulate the system to bring it closer to the orbit, which is not easy to achieve, continuous feedback control is adopted to achieve this. The main difference from the OGY control method is that interference can be added at any time to exercise control. The specific idea is to extract a portion of the output signal from a known controlled system and then return it to the system after waiting for a certain delay. The advantage of this method is that it does not require the introduction of additional periodic signals from outside. Only by feedback control itself, strong chaos control can be achieved through this method.
Transmission and migration control methods
It is an open-loop regulation theory and method based on the ‘two-step’ approach. The first step is to achieve stable control of chaotic states. That is, the attractor is found and the system is stabilized on the target attractor, and then control measures are taken to transition the target to the target attractor. The system is stabilized in the target attractor to achieve stable control. This method only needs to know the initial state of the system and does not need to know other states. However, before applying control, it is necessary to understand the properties of the controlled system so that the target to be controlled cannot be arbitrarily selected.
Anti-chaos control
The history of chaos anti-control research is not as long as the history of chaos control and synchronization. Its origin is due to scientists realizing that not all chaos needs to be suppressed. Some of its chaotic phenomena have a positive side, so it needs to be strengthened and strengthened to make it more effective. Although there are many research projects on chaos control and synchronization, there are still difficulties in implementation and improvement needs, especially in the direction of chaos synchronization. The flicker processing in the control process of the system, the noise distribution in the transmission process of information, the stability enhancement of synchronization control, and the temporal enhancement of synchronization control cannot meet the practical needs fully, and further deepening and exploration are needed.
Application of sliding-mode variable structure control
The unique discontinuous differential property in the control process can be said to be the most distinctive feature of sliding-mode control. It makes the manipulation process and its results superior to traditional methods in many aspects. This is reflected in the fact that the control process can be adjusted according to time and situation, which is a key difference and characteristic between sliding mode control and other control systems. The characteristic of sliding is that within a certain period, the system cannot be affected by parameter changes and can wander up and down a given trajectory within a small range with good stability.
In general, the state space of a system has a coupling surface
Normal point: The point moved by the system. It passes through the coupling surface near
Starting point: The motion of the system reaches a point near the coupling surface
Endpoint: The motion of the system reaches a point near the coupling plane
In sliding-mode control, the starting point and the starting point are usually not very important, but the ending point plays an important role. It can be said that as long as there is an area completely composed of endpoints around the switching surface
Alternatively, the formula is as follows:
The formula can also be written as follows:
A formula in the following form is proposed:
Due to Eq. (4) being positively definite in the vicinity of the coupling interface, but due to Eq. (3), the derivative of Eq. (4) is negative semidefinite. This indicates that
It is assumed that there is a control system:
The switching function must be specified:
The control function is solved as follows:
Among them,
There is a sliding mode, that is, Eq. (7) is true. The accessibility condition is satisfied, and all motion points outside of the switching plane A reach the switching plane at a certain time. The stability of the sliding mode motion is ensured. The dynamic quality conditions of the control system are implemented.
The above (1), (2), and (3) are the three basic conditions of sliding mode control. Only when these three conditions are satisfied, a given system can be defined as sliding mode control.
Adaptive dislocation synchronization method
The chaotic system model is as follows:
Among them,
The response system is as follows:
Among them,
Equation (4.1) indicates that if synchronization is achieved through
Among them, the formula is as follows:
Adaptive controllers
Parameter adaptive law:
The Lyapunov potential function is derived from the stability theory Lyapunov, as shown in Eq. (24):
Equation (24) is taken as a derivative, resulting in the following formula:
Equations (4.1)–(23) are brought into Eq. (25), and the following formula can be obtained:
Adaptive active dislocation antisynchronization combines adaptive methods with active control methods to achieve phase de-synchronization of hybrid cleaning systems.
The dynamic system model is as follows:
The following needs to be met:
Equation (4.1) is rewritten as follows:
The response system is as follows:
Assuming errors of
It is assumed that
Equation (31) can be transformed to obtain the following formula:
It is assumed that
and
Among them, Eq. (32) is equivalent to Eq. (33), so the stability analysis of the faulty system is transformed into the stability analysis of the dynamic system in Eq. (33). It is assumed that
Controller
Experimental subjects: Control algorithms of traditional chaotic system synchronization methods and control algorithms of chaotic system synchronization methods based on parameter adaptive methods.
Experimental purpose: The purpose is to explore the impact of parameter adaptive methods on high-performance control algorithms for the synchronization of unified chaotic systems.
Experimental process: The two algorithms were subjected to error risk testing, computational complexity testing, synchronization performance rating testing, and chaotic system control effectiveness rating testing, respectively. Differences in test results are observed, and the experimental results are recorded and analyzed.
Error risk testing:
Any algorithm calculation process carries an error risk, and the error risk can have an impact on the calculation process and the results. The greater the risk of error, the more likely the calculation process of the synchronization control algorithm for chaotic systems is to encounter problems. This would affect the calculation results. The control algorithm of the traditional chaotic system synchronization method and the control algorithm of the chaotic system synchronization method based on the parameter adaptive method were subjected to 10 error risk tests, respectively. Differences in test results are observed. The specific results are shown in Fig. 1.
Error risk test.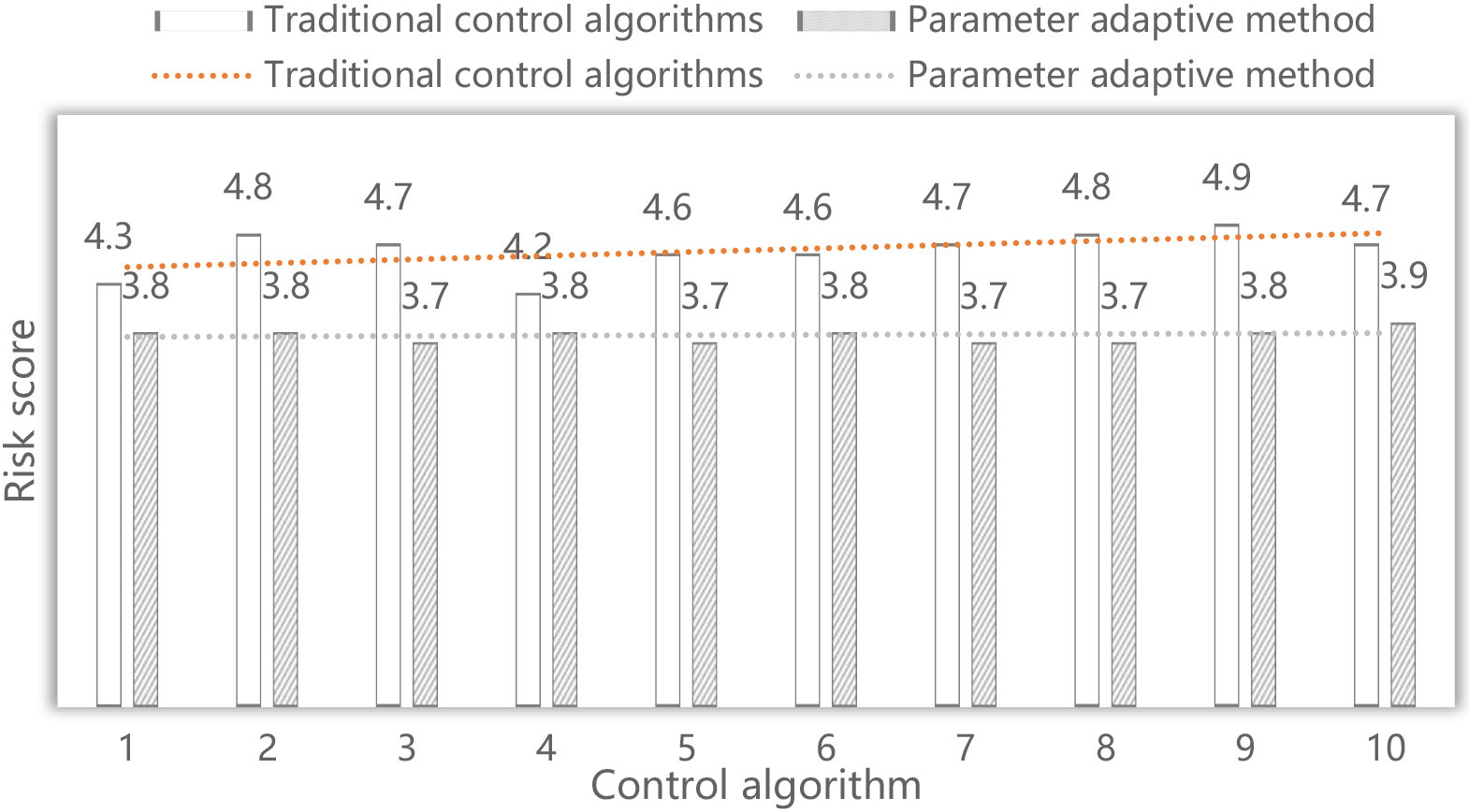
In Fig. 1, it can be seen that the results of the error risk test of traditional algorithms were significantly higher than those of the control algorithms using parameter adaptive methods. Among them, the error risk test results of traditional algorithms were between 4.0 and 5.0, and the error risk test results of adaptive parameter control algorithms were between 3.5 and 4.0. In summary, parameter adaptive methods could effectively reduce the error risk of high-performance control algorithms for synchronization of a unified chaotic system.
Computational Process Complexity Testing:
The more complex the calculation process, the more prone it is to errors. Optimizing the calculation process of high-performance control algorithms for unified chaotic system synchronization can effectively improve the calculation speed and ensure the accuracy of the calculation. The computational complexity of the two algorithms was tested through 5 experiments. Differences in test results were observed between the two methods. The impact of parameter adaptive methods on the computational complexity of high-performance control algorithms to control the synchronization of unified chaotic systems was explored. The experimental results were recorded and analyzed, as shown in Fig. 2.
Computational process complexity test.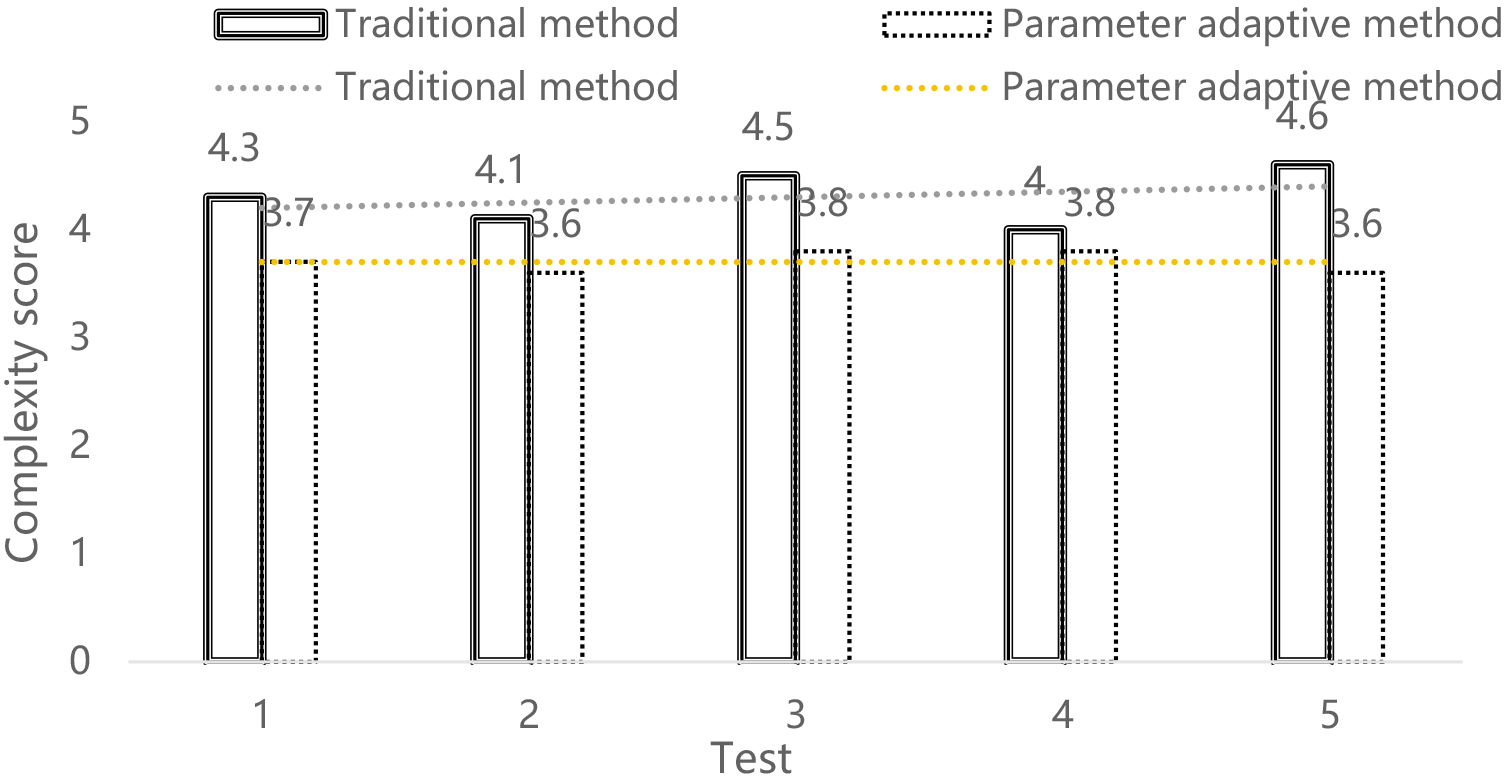
In Fig. 2, it can be seen that the complexity score of traditional algorithms was higher than that of parameter adaptive methods. The average complexity score of the traditional algorithm calculation process was 4.3, while the average complexity score of the parameter adaptive method calculation process was 3.7. The computational complexity of the high-performance control algorithm for unified chaotic system synchronization control based on the parameter adaptive method was simplified. Compared to the traditional algorithm calculation process, the parameter adaptive method reduced the complexity score of the calculation process by 0.6.
Synchronous performance rating testing:
Chaos synchronization is a further extension of traditional synchronization problems in the research field, which is mainly divided into identical chaos synchronization and non-identical chaos synchronization. Among them, identical chaotic synchronization mainly refers to complete synchronization, while non-identical chaotic synchronization mainly refers to phase synchronization, lag synchronization, etc. The synchronization performance scores of the two calculation methods were tested 10 times for complete synchronization, phase synchronization, and lag synchronization performance scores. The difference in the results of the synchronous performance score test was observed between the two calculation methods, as shown in Fig. 3.
Synchronization performance score test.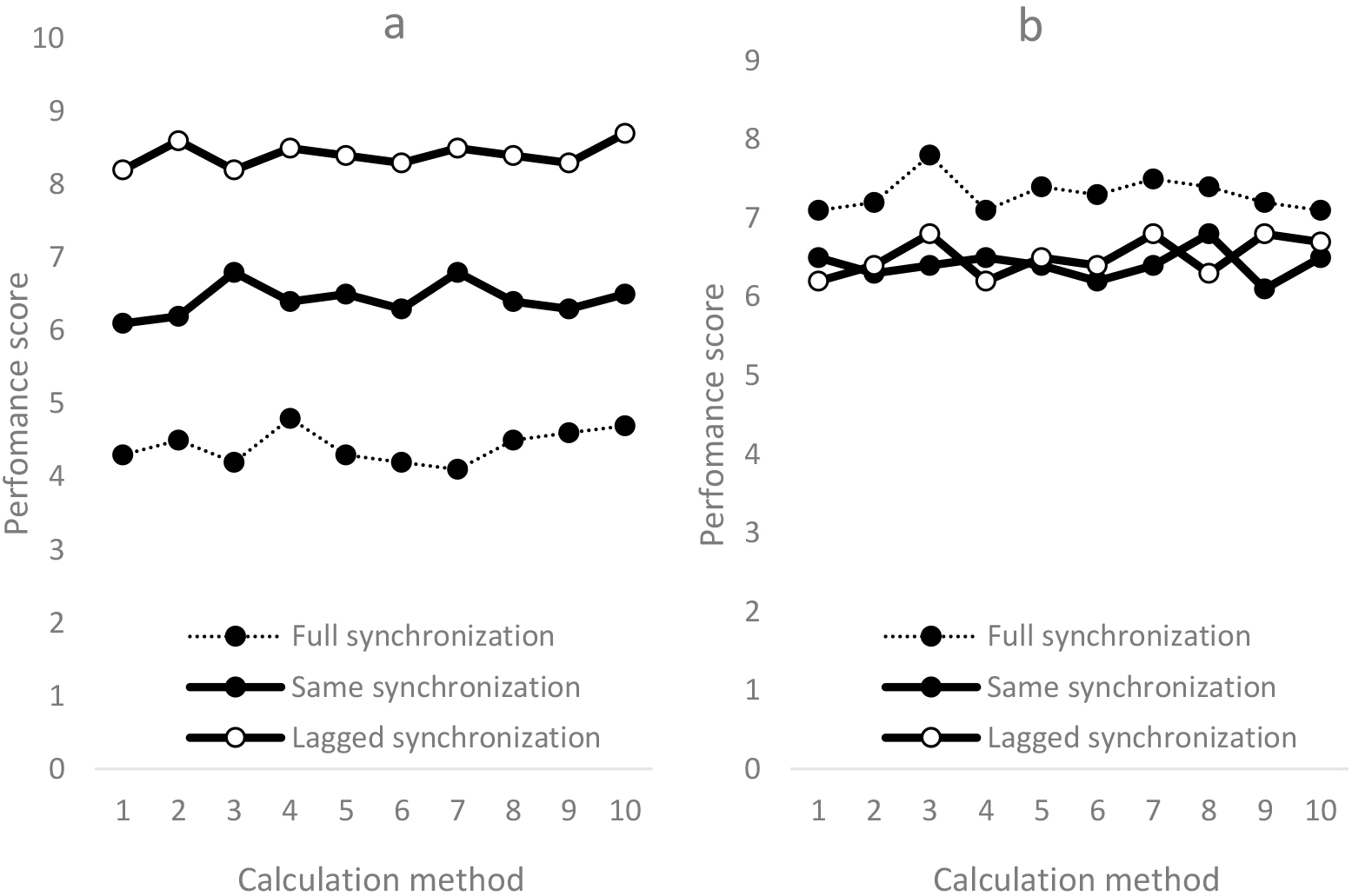
From Fig. 3, it can be seen that Figure A shows the results of the traditional synchronization performance scoring test, while Figure B shows the results of the parameter adaptive method synchronization performance scoring test. The lag synchronization performance score of the traditional algorithms was higher than that of the parameter adaptive methods, and the phase synchronization performance score of the traditional algorithms was not significantly different from that of the parameter adaptive methods. The complete synchronization performance score of the parameter adaptive methods was higher than that of the traditional algorithms. In summary, the application of parameter adaptive methods could effectively improve the synchronization performance of control algorithms.
Chaos system control effect rating:
Five users were selected to rate the effectiveness of the control of two different chaotic systems, as shown in Fig. 4.
Chaotic system control effect score.
From Fig. 4, it can be seen that the five users rated the effectiveness of the parameter adaptive method for chaotic system control higher than the effectiveness of traditional chaotic system control. The control effectiveness score for traditional chaotic systems was between 7.5 and 8.0, while the control effectiveness score for parameter adaptive methods for chaotic systems was between 8.0 and 8.5. The control effectiveness rating of the control algorithm of the unified chaotic system based on the adaptive parameter method was improved.
With the rapid development of computer technology, parameter adaptive control is increasingly valued in many fields. However, there are still many problems with fully synchronized control algorithms based on parameter adaptive methods at present. This article presented an asynchronous linear multi-input nonlinear dynamic mean transfer combined with a synchronous controller based on a parameter adaptive method. By analyzing the characteristics and causes of steady-state mismatches in different orders of the system under different disturbances, the impact of various disturbance factors on overall stability performance was determined. Research was conducted on the synchronization control of chaotic systems based on parameter adaptation, including the adaptive dislocation synchronization method and adaptive active dislocation antisynchronization. Under traditional synchronous control methods, it was difficult to establish accurate, simple, and easy-to-implement system models due to a certain degree of complex correlation between parameters. The parameter adaptive method had obvious advantages in improving the performance of synchronous control methods and could effectively improve the problems existing in traditional synchronous control methods. Through research on the unified chaotic system control algorithm based on parameter adaptive methods, it was found that error risk and computational complexity were reduced and the synchronization performance and control effect were improved.